一种抗过载的图像采集装置的制作方法
[0001]
本实用新型属于探测器技术领域,涉及一种抗过载的图像采集装置。
背景技术:
[0002]
随着包括无人机在内的飞行器技术的不断发展成熟,无人机已被广泛应用到航拍、遥感测绘、森林防火等工业及商业用途。而为了实现这些功能,往往需要在飞行器上搭载拍摄装置,进行各种角度的航拍。然而限于飞行器有限的搭载环境,拍摄用的图像采集器容易产生振动,影响拍摄效果。
技术实现要素:
[0003]
本实用新型解决的技术问题在于提供一种抗过载的图像采集装置,通过闭锁解锁机构的解锁闭锁可保护图像采集装置,还能够减少冲击、振动对图像采集装置的干扰。
[0004]
本实用新型是通过以下技术方案来实现:
[0005]
一种抗过载的图像采集装置,包括通过固定联盘悬臂式以固定在飞行器安装面上的成像机构,所述的成像机构包括内部开设有视像通道的成像固定框,光学器件设置在视像通道内,视像通道上方设有与光学器件相匹配的成像组件;
[0006]
所述视像通道前方设有通过反射镜轴设在反射镜固定框上的反射镜,反射镜固定框上还设有与反射镜轴相平行的陀螺轴,其上设有双轴陀螺;俯仰框架通过轴承嵌套在横滚框架上,横滚框架与成像固定框通过连杆固定连接;反射镜固定框旁侧设有驱动反射镜轴、陀螺轴转动的俯仰电机,上侧设有驱动反射镜固定框旋转的横滚电机;
[0007]
所述的反射镜固定框上设有闭锁销,其上设有限位块;成像固定框上开设有与闭锁销相匹配的闭锁孔,闭锁孔内还设有与限位块相匹配的定位环槽,定位环槽的后侧设有弹簧。
[0008]
所述的反射镜固定框与成像固定框的闭锁、解锁为:
[0009]
闭锁销伸入闭锁孔中,限位块被定位环槽卡住,实现射镜固定框与成像固定框的闭锁;
[0010]
当反射镜固定框受到足够冲击时,惯性带动闭锁销冲破定位环槽对限位块的限制,限位块压缩弹簧;被压缩的弹簧回弹,将闭锁销从闭锁孔中推出,弹簧被限制在闭锁孔内,实现实现射镜固定框与成像固定框的解锁。
[0011]
所述的反射镜固定框与成像固定框解锁后,反射镜轴由俯仰电机、横滚电机提供的电机力矩保持稳定。
[0012]
所述的成像固定框上开设有减震固定孔,减震固定孔内套设有h型金属隔圈,h型金属隔圈与固定框之间还设有双向减震垫;减震螺钉穿过减震固定孔将固定框固定在固定联盘上。
[0013]
所述的视像通道左右两侧分别设有激光测距控制电路板和图像传输控制电路板,上方布设有与光学器件相匹配的光学成像组件和图像处理组件;
[0014]
所述图像传输控制电路板的上方还设有与其相连接的图像传输仪,图像处理组件通过传输线与图像传输仪相连接;
[0015]
所述的激光测距控制电路板的上方还设有与其相连接的激光测距仪。
[0016]
所述成像固定框的旁侧设有为各组件或部件供电的电源模块。
[0017]
所述双轴陀螺设在陀螺轴上悬空框内,所述反射镜的镜面朝向光学器件;
[0018]
在俯仰框架的一侧陀螺轴、反射镜轴还以1/2的传动比通过转轮、钢带传动机构相连接,陀螺轴还通过传输带与俯仰电机的输出轴相连接;俯仰框架的另一侧还设有与双轴陀螺相连接的测角传感器;
[0019]
所述的横滚框架上还设有与双轴陀螺相连接的方位传感器;
[0020]
测角传感器、方位传感器分别与反射镜控制单元的信号输入端相连接,反射镜控制单元的信号输出端经pwm驱动模块与俯仰电机、横滚电机相连接。
[0021]
所述的悬空框位于俯仰框架的的中心,当载体姿态变化时陀螺组件将探测到悬空框产生的角速度,所述的测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元生成保持反射镜视轴稳定的驱动指令,并通过pwm驱动模块发送给俯仰电机、横滚电机。
[0022]
当载体俯仰方向发生角度变化时,测角传感器向反射镜控制单元输出角度变化对应的俯仰信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件相对于惯性空间不变;
[0023]
当载体横滚方向发生角度变化时,方位传感器向反射镜控制单元输出角度变化对应的方位信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件相对于惯性空间不变。
[0024]
当陀螺轴相对于载体转动时,钢带传动机构带动反射镜轴转动一半的角度,使反射镜的视轴在惯性空间保持稳定的效果。
[0025]
所述的俯仰框架包括设有转轴的横臂和其两侧设置的音叉型纵臂,音叉型纵臂之间设有相平行的陀螺轴和反射镜轴;其中陀螺轴上设有呈方型的悬浮框架,用于安装陀螺组件。
[0026]
与现有技术相比,本实用新型具有以下有益的技术效果:
[0027]
本实用新型提供的抗过载的图像采集装置,通过可以二维自由度运动的反射镜来为光学器件提供视轴的惯性稳定,成像机构装置固定不动,由反射镜旋转来实现拍摄轴的稳定,保持图像采集或拍摄的稳定性;而光学器件等与成像固定框固联,抗冲击能力较强,需要保护的是反射镜组件;所以本实用新型通过基于闭锁销、闭锁孔的闭锁机构的锁定来保障反射镜组件在达到拍摄位置前避免损伤;而在飞行受到较大的冲击力时,基于闭锁销、闭锁孔的闭锁机构依靠惯性冲量解锁,恢复反射镜组件的二维自由度运动;然后在利用电机力矩定位保持反射镜的稳定。
附图说明
[0028]
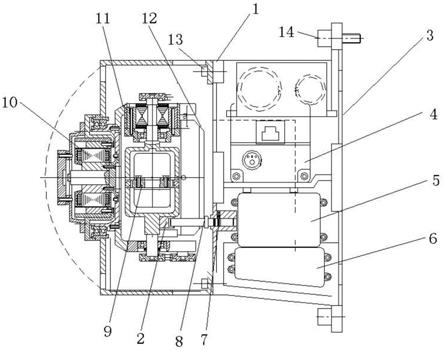
图1为本实用新型的结构示意图;
[0029]
图2为成像固定框的结构示意图;
[0030]
图3为成像固定框的侧向视图;
[0031]
图4为成像固定框的减震固定示意图;
[0032]
图5为反射镜固定框的结构示意图之一;
[0033]
图6为反射镜固定框的结构示意图之二;
[0034]
图7为反射镜固定框的结构示意图之三;
[0035]
其中,1为成像机构,2为反射镜固定框,3为固定联盘,4为光学成像组件,5为图像处理组件,6为图像传输组件,7为弹簧,8为闭锁销,9为双轴陀螺,10为横滚电机,11为俯仰电机,12为反射镜,13为连接螺钉,14为减震螺钉,15为h型金属隔圈,16为双向减震垫,17为减震螺钉。
具体实施方式
[0036]
下面结合实施例对本实用新型做进一步详细描述,所述是对本实用新型的解释而不是限定。
[0037]
参见图1-图7,一种抗过载的图像采集装置,包括通过固定联盘悬臂式以固定在飞行器安装面上的成像机构,所述的成像机构包括内部开设有视像通道的成像固定框,光学器件设置在视像通道内,视像通道上方设有与光学器件相匹配的成像组件;
[0038]
所述视像通道前方设有通过反射镜轴设在反射镜固定框上的反射镜,反射镜固定框上还设有与反射镜轴相平行的陀螺轴,其上设有双轴陀螺;俯仰框架通过轴承嵌套在横滚框架上,横滚框架与成像固定框通过连杆固定连接;反射镜固定框旁侧设有驱动反射镜轴、陀螺轴转动的俯仰电机,上侧设有驱动反射镜固定框旋转的横滚电机;
[0039]
所述的反射镜固定框上设有闭锁销,其上设有限位块;成像固定框上开设有与闭锁销相匹配的闭锁孔,闭锁孔内还设有与限位块相匹配的定位环槽,定位环槽的后侧设有弹簧。
[0040]
所述的反射镜固定框与成像固定框的闭锁、解锁为:
[0041]
闭锁销伸入闭锁孔中,限位块被定位环槽卡住,实现射镜固定框与成像固定框的闭锁;
[0042]
当反射镜固定框受到足够冲击时,惯性带动闭锁销冲破定位环槽对限位块的限制,限位块压缩弹簧;被压缩的弹簧回弹,将闭锁销从闭锁孔中推出,弹簧被限制在闭锁孔内,实现实现射镜固定框与成像固定框的解锁。
[0043]
所述的反射镜固定框与成像固定框解锁后,反射镜轴由俯仰电机、横滚电机提供的电机力矩保持稳定。
[0044]
所述的成像固定框上开设有减震固定孔,减震固定孔内套设有h型金属隔圈,h型金属隔圈与固定框之间还设有双向减震垫;减震螺钉穿过减震固定孔将固定框固定在固定联盘上。
[0045]
所述的视像通道左右两侧分别设有激光测距控制电路板和图像传输控制电路板,上方布设有与光学器件相匹配的光学成像组件和图像处理组件;
[0046]
所述图像传输控制电路板的上方还设有与其相连接的图像传输仪,图像处理组件通过传输线与图像传输仪相连接;
[0047]
所述的激光测距控制电路板的上方还设有与其相连接的激光测距仪。
[0048]
所述成像固定框的旁侧设有为各组件或部件供电的电源模块。
[0049]
所述双轴陀螺设在陀螺轴上悬空框内,所述反射镜的镜面朝向光学器件;
[0050]
在俯仰框架的一侧陀螺轴、反射镜轴还以1/2的传动比通过转轮、钢带传动机构相连接,陀螺轴还通过传输带与俯仰电机的输出轴相连接;俯仰框架的另一侧还设有与双轴陀螺相连接的测角传感器;
[0051]
所述的横滚框架上还设有与双轴陀螺相连接的方位传感器;
[0052]
测角传感器、方位传感器分别与反射镜控制单元的信号输入端相连接,反射镜控制单元的信号输出端经pwm驱动模块与俯仰电机、横滚电机相连接。
[0053]
所述的悬空框位于俯仰框架的的中心,当飞行载体姿态变化时陀螺组件将探测到悬空框产生的角速度,所述的测角传感器、方位传感器分别将检测的俯仰位置信号、方位位置信号发送给反射镜控制单元;反射镜控制单元生成保持反射镜视轴稳定的驱动指令,并通过pwm驱动模块发送给俯仰电机、横滚电机。
[0054]
当飞行载体俯仰方向发生角度变化时,测角传感器向反射镜控制单元输出角度变化对应的俯仰信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件相对于惯性空间不变;
[0055]
当载体横滚方向发生角度变化时,方位传感器向反射镜控制单元输出角度变化对应的方位信号,反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件相对于惯性空间不变。
[0056]
当陀螺轴相对于载体转动时,钢带传动机构带动反射镜轴转动一半的角度,使反射镜的视轴在惯性空间保持稳定的效果。
[0057]
所述的俯仰框架包括设有转轴的横臂和其两侧设置的音叉型纵臂,音叉型纵臂之间设有相平行的陀螺轴和反射镜轴;其中陀螺轴上设有呈方型的悬浮框架,用于安装陀螺组件。
[0058]
图像采集器悬臂式固定装置,是基于飞行器的空间要求和安装形式,采用了悬臂式前后布局;以光学器件为主体,激光测距控制电路板和图像传输控制电路板分别固定在其左右两侧,图像处理组件固定在其上部,反射镜及反射镜驱动机构固定在其前端,再用减震固定螺栓通过固定联盘将其本身固定在飞行器的安装面上。
[0059]
具体的,图像采集器通过减震螺栓固定在飞行器的固定联盘上,呈悬臂状态;
[0060]
反射镜及反射镜驱动机构布置最前端,反射镜在反射镜驱动机构的驱动下可以将下方的景物或目标物通过反射便于视像通道内的光学器件感光,克服了光学器件直接朝下放拍摄时调整带来的不便,同时也节省了空间。
[0061]
光学器件布置在后部,图像传输控制电路板、图像处理组件、图像传输仪设置在光学器件周侧,三者之间用通信线缆连接。
[0062]
本装置与飞行器之间由减震螺栓联接,该螺栓与飞行器固联在一起,螺栓与本装置之间有减震橡胶,可吸收飞行器带来的高频振动,实现振动的物理隔离,为图像采集的稳定创造条件。飞行中所受的冲击是前进方向,由固定联盘传递而来,在冲击时有强度不高的切向分量。光学器件被固定在固定框内,抗冲击能力较强,并进一步在固定框外侧包覆橡胶、海绵片等塑性变形结构来吸收来冲击力。本实用新型通过对各部件进行合理布局,并采用悬臂及缓冲结构避免飞行对图像采集器的干扰。
[0063]
根据飞行载体姿态变化情况,通过控制反射镜轴相对载体进行横滚/俯仰两维反
向转动,使采集图像的探测器的视轴能够解脱与飞行载体之间的耦合,这样光路中的反射镜就保持稳定(反射镜保持45
°
的倾角,景物或目标物的视轴始终铅垂向下),使其输入光束与像面光束保持相对稳定,较好地克服了载体在空间和惯量方面的限制;并能够隔离振动,保持视轴的稳定(铅垂向下),不发生晃动,使得拍摄的系列图片呈直线排布,而非s性排布。
[0064]
具体的,陀螺安装在俯仰框架的中心,当载体姿态发生变化时,通过框架轴承的摩擦力矩,带动陀螺框架产生角运动,陀螺探测到该角速度,并通过测角传感器5发送探测信号;反射镜控制单元向驱动电机发出驱动指令,使陀螺轴相对载体反向转动同样的角度,陀螺组件6相对于惯性空间不变;
[0065]
参见图4,陀螺和反射镜安装在同一框架两个平行的轴上,两者之间用钢带以1/2传动比相联,即陀螺轴转一度,反射镜转半度。
[0066]
当俯仰方向发生一个角度的变化时,陀螺立即输出一个对应的信号,然后又驱动电机做相反运动,使陀螺相对载体反向转动同样一个角度,其结果是陀螺组件相对于惯性空间不变。
[0067]
当陀螺组件相对于载体转动时,1/2传动机构带动反射镜转动一半的角度,根据反射镜几何光学原理,入射光不动,反射镜法线转动半度,出射光将转动一度,保证了视轴在惯性空间保持稳定。
[0068]
横滚向反射镜转一度,视轴也转一度,故横滚向陀螺和反射镜直接固联,当陀螺组件在惯性空间稳定时,视轴也得到稳定。
[0069]
以上给出的实施例是实现本实用新型较优的例子,本实用新型不限于上述实施例。本领域的技术人员根据本实用新型技术方案的技术特征所做出的任何非本质的添加、替换,均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1