用于在交通工具网络中实现集体感知的制作方法
用于在交通工具网络中实现集体感知
相关申请
1.本技术要求2019年6月21日提交的美国临时申请第62/865,103号、2020年4月1日提交的美国临时申请第63/003,839号和2020年4月23日提交的美国临时申请第63/014,469号的优先权,这些临时申请中的每一临时申请各自的内容通过引用以其整体合并于此。
技术领域
2.本文中所描述的实施例总体上涉及边缘计算、网络通信和通信系统实现方式,并且具体涉及连接的和计算机辅助和/或自主驾驶交通工具、车联网(iov)、智能运输系统(its)和物联网(iot)技术。
背景技术:
3.智能运输系统(its)包括与实现交通安全性和效率的提高以及减少排放和燃料消耗的不同运输和交通模式有关的高级应用和服务。可将各种形式的无线通信和/或无线电接入技术(rat)用于its。
4.its包括协作式its,诸如集体感知服务(cps)。cps通过促进its站之间的信息共享来支持道路和交通安全领域中的its应用。由于其他its-s有助于上下文信息,因此cps降低了its-s关于其当前环境的环境不确定性。通过降低环境不确定性,它提高了its的效率和安全性。
附图说明
5.在附图中(这些附图不一定是按比例绘制的),相同数字可描述不同视图中的类似组件。具有不同的字母后缀的相同的数字可表示类似组件的不同实例。在所附附图的图中通过示例的方式而非限制性地图示出一些实施例,其中:
6.图1和图2图示出根据各实施例的示例分层成本地图。
7.图3-图7图示出根据各实施例的示例集体感知消息(cpm)结构。图8-图9图示出根据各实施例的示例cpm过程。
8.图10示出了根据各实施例的示例站参考架构。图11示出了根据各实施例的示例cps服务功能架构。图12示出了根据各实施例的cp基本服务的示例对象数据提取水平。图13图示出用于合并和使用本发明实施例的示例环境。图14和图15描绘了(多个)边缘计算系统中的各种计算节点的示例组件。
具体实施方式
i集体感知服务(cps)方面
9.随时间推移,交通工具的操作和控制正变得更加自主,并且在未来,大多数交通工具将可能变成完全自主的。包括某种形式的自主性或以其他方式辅助人类操作者的交通工具可被称为“计算机辅助或自主驾驶”交通工具。计算机辅助或自主驾驶(c/ad)交通工具可
包括人工智能(ai)、机器学习(ml)、和/或用于实现自主操作的其他类似的自学习系统。典型地,这些系统感知其环境(例如,使用传感器数据)并执行各种动作以使成功的交通工具操作的可能性最大化。
10.交通工具对外界(v2x)应用(被简称为“v2x”)包括以下通信类型:交通工具对交通工具(v2v)、交通工具对基础设施(v2i)和/或基础设施对交通工具(i2v)、交通工具对网络(v2n)和/或网络对交通工具(n2v)、交通工具对行人通信(v2p)、以及its站(its-s)对its-s通信(x2x)。v2x可以使用协作式认知来为终端用户提供更智能的服务。这意味着诸如交通工具站或交通工具用户装备(vue)之类的实体(包括c/ad交通工具、路边基础设施或路边单元(rsu)、应用服务器、以及行人设备(例如,智能电话、平板等))收集其本地环境的知识(例如,接收自附近的其他交通工具或传感器装备的信息)以处理并共享该知识,以便提供用于碰撞警告系统、自主驾驶等等的更加智能的服务(诸如协作式感知、操纵协调等等)。虽然本文中的实施例在汽车的上下文中讨论,但实施例也可应用于其他类型的交通工具,包括飞行器、船只等等。
11.一个此类v2x应用包括智能运输系统(its),its是用于利用信息和通信技术来支持对商品和人类的运输以便高效且安全地使用运输基础设施和运输装置(例如,汽车、火车、飞行器、船只等)的系统。既在国际级别又在区域级别,在各种标准化组织中对its的要素进行标准化。
12.its中的通信(itsc)可利用各种现有的和新的接入技术(或无线电接入技术(rat))和its应用。这些v2x rat的示例包括电气和电子工程师协会(ieee)rat和第三代合作伙伴(3gpp)rat。ieee 802.11p rat包括例如,有时称为交通工具环境无线接入(wave)、专用短程通信(dsrc)、5ghz频带中的智能运输系统(its-g5)的ieee 802.11p协议,并且有时ieee 802.16协议称为全球微波接入互操作(wimax)。3gpp rat包括例如,使用长期演进(lte)技术的蜂窝v2x(c-v2x)(有时被称为“lte-v2x”)和/或使用第五代(5g)技术的蜂窝v2x(c-v2x)(有时被称为“5g-v2x”)。可将其他rat用于its和/或v2x应用,这些rat诸如使用uhf和vhf频率、全球移动通信系统(gsm)和/或其他无线通信技术的rat。
13.its和/或v2x应用用于管理交通流量、车道占用、收费、跟踪货运、提供道路状况警报、提供动态/实时地图(例如,its本地动态地图(ldm))等。许多its应用依赖于情境或协作式认知(ca)的概念。道路交通中的ca意味着道路使用者和路边基础设施被告知彼此的位置、动力学和属性。道路使用者包括道路上或道路附近对交通安全和控制发挥作用的各种使用者,诸如汽车、卡车、摩托车、自行车或者甚至行人以及路边基础设施装备(包括道路标志、交通灯或障碍物、大门等)。彼此的认知是若干道路安全性和交通效率应用的基础,其中包含如etsi tr 102 638版本1.1.1(2009年6月)(此后为“[r00]”)中所述的许多用例。ca是通过使用一种或多种底层接入技术或rat在道路使用者之间定期广播信息来实现的,以传达ca的消息。
[0014]
本文讨论的实施例总体上涉及用于支持道路和交通安全领域中的应用的集体感知服务(cps)。集体感知(cp)涉及its-s彼此共享有关其当前驾驶环境的信息。与ca相比,参与cps的its-s广播有关其当前(例如,驾驶)环境的信息,而不是有关其自身的信息。出于此种目的,cps涉及不同的its-s借助一种或多种v2x rat主动交换由传感器检测到的本地感知到的对象(例如,其他道路参与者、障碍物等)。cp通过向its-s的相互视场(fov)贡献信息
而降低了its-s的环境不确定性。cps还包括集体感知消息(cpm)的语法和语义,以及数据和消息处理功能,从而以协作方式提高环境认知。
[0015]
本文讨论的实施例通过实现感知信息的共享来增强现有cps,感知信息包括分层成本地图的多层和/或各种传感器的原始传感器数据。本文的实施例扩展现有的cps以实现分层成本地图共享,这对于包括大量对象的存在的场景或涉及在its-s处的本地传感器的fov中的对象的遮挡的场景可以是有用的。各种成本地图层的cp可以提高各个its-s处的成本地图质量。公开的实施例还为cps的分层成本地图方法提供新的成本地图层。一些实施例允许its-s通过its-s之间的集体协调来集体改进或纠正成本地图值的差异。所有这些实施例都允许its-s使用对一个或多个相邻的its-s的感知和分析来准备更高置信度的成本地图(与现有成本地图解决方案相比)。
[0016]
本公开还包括使用更高效的cpm交换机制来减少网络/信令开销的实施例。这些实施例包括:在更长的时间段内交换完整的cpm,在完整的cpm传输之间仅传输部分/增量的cpm,每当可能时(诸如对于cpm中的大量数据)启用对cpm的单播传输,以及在传输具有大量数据的cpm之前确保该大量数据对接收者有用的握手机制。此外,本文的实施例扩展现有的cps以实现对象的组(或集群)报告,这可以提供信令开销的进一步减少和计算资源消耗的进一步减少。在这些实施例中,当属于同一类的对象的位置在距彼此预定义或配置的距离内和/或当这些对象在相同或相似的方向上移动时,它们可以作为单个实体/对象被报告。可描述和/或要求保护其他实施例。i.a.cps的分层成本地图
[0017]
图1和图2示出了根据各实施例的cp的示例分层成本地图100和200。成本地图(或“成本地图”)是一种包含用于路径规划的成本(或“成本值”)二维(2d)网格的数据结构。成本地图中的网格或单元值是与进入或行进穿过相应网格或单元相关联的成本值。成本地图用于导航或以其他方式行进通过填充有对象的动态环境。换句话说,成本地图100表示c/ad交通工具、机器人、无人机或其他可移动对象周围的规划搜索空间。
[0018]
对于许多用例,诸如c/ad交通工具和/或(半)自主机器人,行进路径不仅考虑了起点和终点,而且还取决于关于更大上下文的附加信息。有关路径规划器使用的环境的信息存储在成本地图中。传统成本地图(也称为“单片成本地图”)将所有数据(成本)存储在单个网格中。分层成本地图(lcm)(诸如成本地图100)维护层的有序列表,每个层都跟踪与特定功能和/或传感器类型相关的数据。然后将每一层的数据累积到主成本地图150中。
[0019]
在一些实现方式中,每个网格单元的状态是自由、占用或未知中的一者。在这些实现方式中,成本值是指给定单元自由(未被占用)、被对象占用或未知的概率或可能性。在一些实施方式中,每个网格单元的状态可以是驾驶通过该单元是安全、谨慎或致命的中的一者。在这些实现方式中,成本值是指驾驶通过给定单元是安全的、驾驶通过给定单元是致命的或介于安全与致命之间(即,谨慎)的概率或可能性。此外,成本地图的“成本”可以是由站感知的在当前时间的成本和/或所预测的在特定未来时间(例如,在站打算在车道更改操纵下移动到新车道的未来时间)的成本。
[0020]
如前所述,cps涉及its-s与其他its-s共享感知对象。在现有的cps解决方案中,每个感知的对象均作为个体对象被报告,这在某些场景中可能非常低效,诸如当存在大量对象时,当传感器fov中存在重叠对象,和/或单独的its-s处的传感器fov中的(多个)遮挡时。
例如,因为由于cpm大小限制,每个cpm可包括有限数量的感知对象,因此在大量感知对象的情况下报告每个个体感知对象会产生巨大的通信开销,并且还花费更长的时间来报告所有感知对象。当传感器fov包括重叠对象或遮挡时,对所有对象本身的感知是一项具有挑战性的任务。
[0021]
因此,支持cp分层成本地图(lcm)100和200(或占用网格)以帮助应对这些具有挑战性的场景。至少在与非cp分层成本地图和/或占用网格解决方案相比时,cp lcm 100和200具有带宽和计算效率。如下文更详细讨论的,这些实施例允许替换或补充现有cpm的数据容器(例如,感知对象容器和自由空间附录容器),从而节省大量通信资源并显著减少信令和处理器开销。
[0022]
成本地图100和/或200的每个单元中的“成本”或成本值表示导航通过该网格单元的成本。在各实施例中,layeredcostmapcontainer(分层成本地图容器)考虑成本地图的基于网格的表示,其中每个单元携载成本(或成本值)或该单元中存在特定类型的障碍物、对象和/或易受伤害的道路使用者(vru)的概率。在一些实现方式中,每个网格单元的状态是自由、占用或未知中的一者。在这些实现方式中,成本值是指给定单元自由(未被占用)、被对象占用或未知的概率或可能性。在一些实施方式中,每个网格单元的状态可以是驾驶通过该单元是安全、谨慎或致命的中的一者。在这些实现方式中,成本值是指驾驶通过给定单元是安全的、驾驶通过给定单元是致命的或介于安全与致命之间(即,谨慎)的概率或可能性。此外,成本地图的“成本”可以是由站感知的在当前时间的成本和/或所预测的在特定未来时间(例如,在站打算在车道更改操纵下移动到新车道的未来时间)的成本。
[0023]
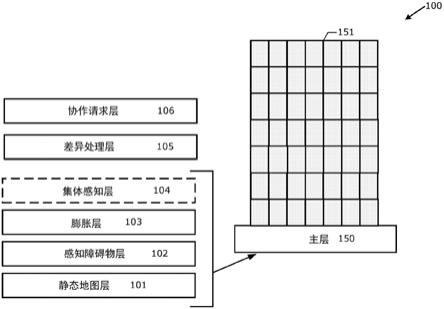
现在参考图1,其示出了根据各实施例的示例cp lcm 100。cp lcm 100维护层101至106的有序列表,每一层跟踪与特定功能和/或传感器类型相关的数据。然后将一些层的数据累积到主成本地图150中(例如,图1中的层101-104)。cp lcm 100还包括一些不被聚合到主层150中的层(例如,图1中的层105和106)。
[0024]
在所图示的示例中,lcm 100最初具有四个层101-104和主成本地图150(图1中的“主层150”)。层101-104中的每一层维护它们自己的网格副本。在其他实现方式中,静态地图层101、障碍物层102和cp层104维护它们自己的网格副本,而膨胀层103不这样做。为了更新成本地图,从有序列表中的第一层(例如,静态地图层101)开始,在每个层101-104上调用并执行updatebounds(更新边界)方法。updatebounds方法轮询每个层以确定它需要更新成本地图中的多少。为了确定新的边界,层101-103使用由its-s实现的本地传感器的新传感器数据更新它们自己的成本地图,并且cp层104从其他its-s获得其他cp lcm 100。在一些实现方式中,每一层使用各自的传感器数据类型,而在其他实施例中,每一层可使用多种类型的传感器数据。
[0025]
结果是包含每个层101-104需要更新的所有区域的边界框。层101-104按顺序迭代,为每个层提供前一层需要更新的边界框(最初是空框)。每层可以根据需要扩展边界框。该第一阶段产生确定主成本地图中有多少需要被更新的边界框。
[0026]
接下来,每个层101-104依次在边界框中使用updatevalues(更新值)方法来更新主成本地图150,从静态地图层101开始,然后是障碍物层102,然后是膨胀层,并且然后是cp层104。在该第二阶段期间,调用updatevalues方法,在此期间,每个连续层将更新主成本地图150的边界框的区域内的值。在一些实现方式中,updatevalues方法直接对主成本地图
150进行操作而不存储本地副本。“边界框”是围绕感知对象的2d或三维(3d)框。边界框可以包围一个网格或单元、多个网格/单元、或单个网格/单元的部分。每个边界框的大小可以基于被边界框包围的感知对象的大小。在各实施例中,每个its-s准备和更新多于一层或多类型的成本地图。这些层按照图1所示的顺序从静态地图层101向上被更新。不同的层具有不同的变化速率,因此,基于诸如交通工具的速度、天气、环境条件等之类的因素以不同的频率更新不同的层。
[0027]
此外,差异处理层105和协作请求层106使邻居之间能够协作以实现更好和可靠的成本地图层。差异处理层105确定和/或标识cp lcm 150与从邻居接收的其他cp lcm 150之间的差异。这可以在先前讨论的第一阶段和/或第二阶段期间发生。协作请求层106确定/标识其中机载传感器不能以高于阈值的置信度水平确定感知的单元,并且请求其他层更新它们的成本地图本地版本和/或从相邻的its-s请求成本地图。这可以在先前讨论的第一阶段和/或第二阶段期间发生。置信度水平表示置信区间包含未知感兴趣参数的真实(或相对真实)值的概率,并且置信区间是未知感兴趣参数的合理值范围。在实施例中,置信度水平可以应用于各个感知对象。作为示例,v-its-s的传感器系统可以为每个检测到的对象(及其属性)提供传感器数据以及检测/感知的置信度水平(例如,1-100%)。类似地,每个层的各个网格/单元的成本可以与置信度水平相关联。
[0028]
在图1中,lcm 150包括静态地图层101、感知障碍物层102、膨胀层103和集体感知层104。在该示例中,静态地图层101、障碍物层102和膨胀层103是强制性层。在其他示例中,集体感知层104可以是强制性的。在任一示例中,根据its-s的硬件和软件实现方式的能力,可存在其他(非强制性)层。主成本地图150(图1中的“主层150”)是从其他层101-104准备的。主层150包括占用网格151,其具有每个网格/单元中的聚合成本(图1未示出)。
[0029]
静态地图层101是由于道路上或沿路边的静态对象而先验地预先确定的占用网格。静态地图层101包括各种静态和/或半静态对象(例如,路边基础设施、建筑物等)的成本值,该静态地图层101用于全局规划。静态地图可以使用先验的同步定位和映射(slam)算法生成,或者可以从架构图创建。由于静态地图是全局lcm的底层,因此静态地图中的值可以直接复制到主成本地图中。如果站或机器人在使用生成的地图进行导航的同时运行slam,则lcm方法允许静态地图层更新而不会丢失其他层中的信息。在单片成本地图中,整个成本地图将被覆写。lcm的其他层维护由于动态对象以及这些对象的安全性和个人隐私要求产生的成本。
[0030]
感知障碍物层102包括表示道路和路边障碍物(例如,动态或静态)的占用网格和成本值。感知障碍物层102确定感知对象,这些感知对象是操作期间(例如,当its-s是交通工具its-s(v-its-s)时,在驾驶期间)要考虑的障碍物。感知障碍物层102从诸如激光(例如,lidar)、红蓝绿和深度(rgb-d)相机等之类的高精度传感器收集数据,并将所收集的高精度传感器数据放置在其自己的2d网格中。在一些实现方式中,传感器与传感器读数之间的空间被标记为“自由”,而传感器读数的位置被标记为“占用”。用于将感知障碍物层102的值与成本地图中已有的值相结合的方法可以根据传感器数据和/或传感器类型的所需信任级别而有所不同。在一些实现方式中,静态地图101数据可以被所收集的传感器数据覆写,这对于静态地图可能不准确的场景可能是有益的。在其他实现方式中,障碍物层可以被配置成用于仅向主成本地图150添加致命或vru相关的障碍物。
[0031]
膨胀层103包括表示障碍物和永久结构周围的缓冲区的占用网格和成本值。膨胀层103可以在可能移动的对象周围提供缓冲区。膨胀层103执行膨胀过程以在致命障碍物周围插入缓冲区。其中its-s将肯定发生碰撞的位置用致命成本来标记,而紧接在周围的区域则有小的非致命成本。这些值确保its-s不会与致命障碍物发生碰撞,并试图避开此类对象。updatebounds方法增加了先前的边界框,以确保新的致命障碍物将被膨胀,并且先前的边界框外的、可能膨胀到边界框内的旧的致命障碍物也被膨胀。
[0032]
cp层104包括从一个或多个邻居(诸如一个或多个相邻或接近的its-s)接收的占用网格和成本值。这些占用网格可以是由其他its-s生成的主成本地图150的累积。cp层104基于从相邻站接收的cpm中指示的感知对象来确定单元的成本。cp层104使its-s能够针对其中其自己的(机载)传感器可能不具有“良好”观察或不具有任何观察的区域更新其成本地图(例如,主成本地图150)。
[0033]
差异处理层105包括示出其他lcm 100的主层的接收到的成本值与its-s自己的主层150的接收到的成本值之间的差异。可以针对lcm 100中的任何层检测这些差异。差异处理层105使得能够指示并解决邻居之间的感知的差异。差异处理层105可以报告针对各个成本地图层的所选网格单元的差异。在一些实施例中,多数投票机制可用于此目的,其中通过参与的its-s之间的多数投票对每个单元的成本值达成一致。
[0034]
协作请求层106包括示出其中自我its站无法确定具有所需置信度水平的感知的网格的占用网格和成本值。协作请求层106使自我its-s能够请求邻居帮助增强一些单元的成本,对于这些单元,tx its-s不具有确定值的高置信度水平。协作请求层106允许its-s请求一个或多个邻居(例如,其他its-s)帮助增强一些单元的成本,对于这些单元,站可能不具有确定成本值的高置信度水平。一个或多个邻居可以在其cpm中包含感知成本值(以及其他信息,如这些单元处的感知对象)。如果可用,在这种情况下,邻居可以通过发送单播cpm来进行响应。
[0035]
在一些情况下,附近的交通工具可能针对某个(某些)单元观察到不同的成本值(例如,由于一个或多个站的感测错误、交通工具处的传感器对这些单元的不同视角水平,等等。)。在此类情况下,cp可以帮助纠正成本地图中的任何差异。差异处理层105用于指示邻居的成本值之间的差异。在差异处理层105中接收到此类差异指示之后,节点可以针对这些单元对感测和成本地图计算进行重新求值并在邻居之间共享。根据以下一个或多个实施例。
[0036]
在第一实施例中,可以使用多数投票机制来处理成本差异,其中收到多数投票的成本值被认为是“正确的”或“同意的”成本。即,多数邻居指示的成本(或附近多数成本的平均值)被视为正确/同意的成本。此类同意是针对每个有差异的单元单独执行的。所有邻居将更新正确/同意的成本。在这些实施例中,邻居的投票可以基于其可信度和/或基于其他标准/参数而倾斜。
[0037]
在第二实施例中,可以基于感测能力或传感器数据的质量来解决成本差异,其中具有更好的fov、视角(aov)、数据质量等的邻居可以被赋予更高的(多个)权重来为单元选择正确/同意的成本。这些实施例可以组合或单独使用。
[0038]
现在参考图2,其示出了根据各实施例的示例cp lcm 200。cp lcm 200维护层201到210的有序列表,每个层以与图1的cp lcm 100相同或相似的方式跟踪与特定功能和/或
传感器类型相关的数据。然后将一些层的数据累积到主成本地图250(例如,图2中的层201-208)中。cp lcm 200还包括一些不被聚合到主层250中的层(例如,图2中的层209和210)。
[0039]
在图2中,静态地图层201、感知障碍物层202、膨胀层203和集体感知层204可以分别与图1中的静态地图层101、感知障碍物层102、膨胀层103和集体感知层104相同或相似。
[0040]
体素/网格层205包括表示按三维(3d)的道路上和路边的障碍物(例如,动态或静态)的占用网格和成本值。该3d体素网格允许更智能地清除障碍物以反映可以看到它们的多个高度(参见例如,marder-eppstein等人,“办公室马拉松:室内办公环境中的稳健导航”,ieee国际机器人与自动化会议(icra),第300-307页(2010年5月3日))。
[0041]
注意区/事故多发区域层206包括表示检测到的谨慎区和/或事故多发区域或对象(或对象周围的区域)的占用网格和成本值。谨慎区/事故多发区域层206层提供了比使用先前讨论的自由/占用分类更详细地指定感知环境的区域的能力。尽管看起来可导航(例如,被指示为“自由”),但可使用该层通过将该区域标记为“受限”等来限制v-its-s穿过该区域。该层还提供了标记不一定禁止但交通工具不希望通过的区域的能力。
[0042]
声纳层207包括表示使用声纳传感器和相关电路系统检测到的对象和/或感知的环境的占用网格和成本值。该层可用于检测使用其他传感器(例如,lidar等)可能无法检测到的透明对象(例如,玻璃结构)。声纳层207还可以用于以与在感知障碍物层202处获得的传感器数据不同的方式处理声纳传感器数据。在一个示例中,声纳层207可以实现概率声纳模型并使用贝叶斯逻辑更新成本地图。这种方法可以允许保持概率的语义,而不必将它们与成本直接结合。
[0043]
邻近层208可用于检测对象和/或围绕各个对象(例如,vru等)的空间。邻近层208还可以从诸如激光器(例如,lidar)、rgb-d相机等之类的高精度传感器收集数据。在一些实现方式中,邻近层208可以使用较低精度的相机或其他类似传感器。邻近层208可以使用与感知障碍物层202相同或不同的传感器数据或传感器类型。邻近层208使用检测对象的位置/定位和速度(例如,从表示各个vru的传感器数据中提取的)来将值写入邻近层208的成本地图中,然后将这些值与其他层201-207的成本地图值一起添加到主成本地图250中。在一些实现方式中,邻近层208使用高斯模型的混合并将每个对象的高斯值写入到邻近层208的私有成本地图中。在一些实现方式中,可以根据幅度、方差和/或某个(某些)其他合适的参数来缩放生成的值。
[0044]
确认层209确定并指定从一个或多个邻居接收的成本地图与由主层250指示的或以其他方式使用本地传感器感知的成本地图之间的任何差异。模糊层210指定其中机载传感器不能以高于阈值的置信度水平确定感知的单元。图2中的确认层209和模糊层210可以分别与图1中的差异处理层105和协作请求层106相同或相似,并且因此,可以包含与那些层相同或相似的功能。ib.cps的分层成本地图共享技术
[0045]
ca基于交通工具之间定期和事件驱动的基本安全消息(bsm)广播。bsm是可以在相对较短的间隔内传输的相对较短的消息。bsm可用于标识和向交通工具操作员通知可能需要交通工具操作员动作的情况,例如,碰撞警告、紧急警告、预碰撞警告、交通警告等。
[0046]
此外,一些交通工具(诸如c/ad交通工具)采用机上(或机载)传感器来检测对象和/或采用高级驾驶员辅助系统(adas)。对象检测传感器可以是视线(los)传感器,包括例
如,lidar、图像捕捉设备(例如,相机)、雷达、声纳等。los传感器通常用于交通工具中,用于感知周围环境以用于导航和路径规划应用。adas使用los传感器来检测紧接在交通工具周围到约200米内的对象。这些交通工具可以包括安装在交通工具中或交通工具的各个位置上的一个或多个los传感器,其中每个los传感器可以向交通工具操作员提供相对应的传感器数据以帮助交通工具操作员操作交通工具。然而,这些传感器系统通常受到每个传感器的视场(fov)的限制,视场取决于此类传感器在交通工具上或交通工具中的定向和定位。此外,一个或多个传感器的fov可能在操作期间被其他对象阻挡和/或可能受到不利天气和环境条件的负面影响。扩展交通工具中的机载传感器的范围、fov和/或其他能力应该提高操作此类交通工具时的效率和安全性。
[0047]
本公开提供了用于实现以比现有解决方案更低/减少的网络/信令开销在相邻或邻近交通工具之间对本地传感器数据的高效共享的各种消息类型、消息内容和消息交换过程,本地传感器数据包括原始传感器数据、感知对象和/或感知分层成本地图(参见例如,上文讨论的图1和图2)。本文的实施例为c/ad交通工具提供了采用协作/集体环境感知的技术,并将感知的范围和准确性扩展到特定交通工具的本地感测能力之外。本文的实施例可以允许具有传统传感器(其可以是此类传感器的较不可靠、较便宜和/或较为陈旧的型号)的交通工具实现高质量的环境感知;(ii)扩展不利路况和恶劣天气的情况下的感知范围/覆盖范围和质量;(iii)对受阻(封闭)的道路区域进行感知;等等。本文的实施例还允许共享由配备有不同类型传感器的交通工具收集的感知状态信息以相互完善(或补充)并提高感知的置信度水平或质量。cp还通过共享其相互fov的信息来增加感知置信度。
[0048]
在本公开中,术语“集体感知”和“协作感知”可以可互换地使用。在下文讨论的实施例中,可以使用合适的数据和/或对象感知融合算法。该融合算法可能是一种有效的机制,交通工具its-s可以通过该机制基于本地/机载传感器数据和感知数据(例如,在由v2x rat进行的cp共享下从相邻交通工具接收到的数据)执行数据/对象感知融合。
[0049]
如前所述,当前的cps标准为cpm提供语法和语义,并指定数据和消息处理程序,从而以合作方式提高环境认知。cpm在its网络中在its-s之间广播,以共享已被its-s检测和识别的道路使用者(例如,vru)和其他对象的存在。cpm包含有关感知对象的外部可观察信息。然而,当前的cps要求将每个感知对象作为个体对象或在单独的cpm中进行报告。当前的cps还指定了选定的冗余缓解技术,以通过检查其他站发送的cpm来减少不同its-s发送的cpm内容的重复。
[0050]
在现有的cps标准中,诸如etsi ts 103 324版本0.0.15(2020年2月)(此后为“[r01]”),每个感知对象都作为个体对象被报告,这在某些场景下在信令资源消耗、信令拥塞等方面可能是低效的。此类场景可包括例如,当存在大量对象、一个或多个对象在传感器的fov中重叠、和/或传感器的fov中存在(多个)对象遮挡时。例如,因为由于cpm大小限制,每个cpm可以包括有限数量的感知对象,因此在存在大量感知对象的情况下报告每个个体感知对象产生大量的通信开销并且还花费更长的时间来报告所有感知对象。在传感器fov中存在重叠对象或遮挡的情况下,对所有对象本身的感知是具有挑战性的任务。
[0051]
目前在etsi中正在进行的工作是为its实现cps,它提供基本功能以在邻近的v-its-s之间共享感测能力和感知对象(参见例如,[r01])。当前的解决方案提供基于广播的cpm共享,这在网络开销和资源消耗方面是昂贵的。当前的cps解决方案在通信开销、信令和
处理器资源、频谱拥挤/拥塞等方面缺乏以高效方式针对感知环境的报告机制。
[0052]
因此,本文的实施例提供基于分层成本地图的cps(参见例如,图1和图2)以诸如在传感器fov中存在大量对象、重叠对象和/或遮挡的情况下辅助cp。在此类情况下,至少在与非分层成本地图和/或占用网格cps解决方案相比时,基于分层成本地图或占用网格的cps可能是带宽和计算高效的。
[0053]
本文的实施例扩展了现有的cps和cpm,以实现its-s之间的分层成本地图共享。实施例可能有益于涉及在传感器fov中存在大量对象、重叠的对对象的查看和/或遮挡的场景。本文的实施例涉及节点之间的消息交换,诸如各种v-its-s、路边its-s(r-its-s)和/或vru设备/系统之间的cpm交换。此类实施例可以替换或补充现有cpm中的感知对象容器和自由空间附录容器,从而节省大量通信资源并显著减少信令和处理资源消耗/开销。本文的实施例也可以应用于诸如etsi和/或3gpp之类的蜂窝标准中。本文的实施例能够实现邻近性(邻近)交通工具之间的集体感知,以实现高效、安全和协调的自主驾驶环境。i.b.1.示例cpm结构和格式
[0054]
现在参考图3,其示出了cpm 300的示例结构/格式。cpm 300允许its-s cp信息数据,包括传感器信息、感知对象等。cpm 300包括通用its协议数据单元(pdu)头部和cpm参数。its pdu头部是包括具有cpm协议版本(protocolversion(协议版本))、消息类型标识符(messageid(消息id))和始发its-s(例如,发射/发射方(tx)its-s)的站标识符(stationid(站id))的信息的通用头部。protocolversion数据元素(de)用于在接收(rx)its-s处选择适当的协议解码器。its pdu头部包含如在etsi ts 102 894-2版本1.3.1(2018年8月)(此后为“[r03]”)中所指定的那样被包括。cpm上下文中its pdu头部的详细数据呈现规则在etsi tr 103 562版本2.1.1(2019年12月)(此后为“[r02]”)中指定。
[0055]
cpm参数包括多个容器。当前的etsi标准(例如,[r01])可以将各种容器定义为包括一系列可选或强制性数据元素(de)和/或数据帧(df)。然而,应当理解,任何特定标准的要求不应限制本文所讨论的实施例,并且如此,容器、df、de、值、动作和/或特征的任何组合在各实施例中是可能的,包括严格要求被遵循以便符合此类标准的容器、df、de、值、动作和/或特征的任何组合或者强烈推荐和/或与任选的元素一起使用或在存在/不存在任选的元素的情况下使用的容器、df、de、值、动作和/或特征的任何组合。cpm格式中包含的de和df基于etsi通用数据字典(cdd)[r03]和/或利用cen iso/ts 19091(此后为“[r04]”)中定义的某些元素。
[0056]
管理容器提供有关始发its-s的基本信息,无论它是交通工具类型的站(例如,v-its-s)还是rsu类型的站(例如,r-its-s)。无论哪种类型的its-s传播cpm,管理容器均提供有关始发its-s的站类型的信息(stationtype(站类型))(参见例如,[r03])和始发its-s的参考定位。参考定位用于相对于提供的全球定位来引用对象。对于交通工具,参考点是指交通工具边界框前侧中心的地面定位。对于rsu,参考点是指路段或交叉路口上的任意位置。该点用于确定相对其他数据点的偏移,详见[r04]。要提供的参考点在[r02]的第5.4.1和5.4.2节中详述。管理容器还可以包括动作id,该动作id用于消息分段。
[0057]
感知对象的总数在变量numberofperceivedobjects(感知对象数量)中提供。由于消息生成规则和相关联的对象包含方案,报告对象的数量不必与接收到的cpm的包含对象的数量相匹配。接收方its-s不假设这一点,因为感知对象容器中提供的感知对象的数量必
须包括发射方已知并被选择以供经由cpm共享的所有对象。接收方在至少一秒钟内侦听来自同一发射方的进一步的cpm,直到所有对象均已被接收。
[0058]
除了管理容器提供的公共信息外,站数据容器还提供有关始发its-s的更多具体信息。该框架就传播方its-s类型区分两种情况。始发站可以是具有始发交通工具容器中列出的属性的交通工具或移动its-s(例如,v-its-s),或者具有始发rsu容器中呈现的参数的静止its,诸如rsu(例如,r-its-s)。
[0059]
当cpm由v-its-s生成时,站数据容器包含始发its-s的动态信息。始发交通工具容器包括关于传播cpm的交通工具的动态的信息,并被包含在由交通工具始发站its-s传送的每个cpm中。此类信息用于将同一cpm的感知对象容器中描述的对象转换到目标参考框架中,该目标参考框架诸如[r01]、[r02]和iso 8855(2013年11月)(此后为“[r06]”)中详述的以交通工具为中心的坐标系。
[0060]
当cpm由r-its-s生成时,站数据容器包含始发rsu容器,其包括两个参数以引用通过地图数据(map)消息[r04]接收的信息。这些引用可以相对由相同rsu传播的map消息[r04]提供的标识号来作出。这些引用用于将cpm提供的数据与map消息提供的交叉路口或路段的几何学进行匹配。不要求rsu必须传送map消息以将对象与道路几何学进行匹配。在该情况下,可以省略站数据容器。
[0061]
传感器信息容器允许its-s提供有关its-s传感能力的信息。传感器信息容器列出了安装在its-s中或its-s上以执行测量的(多个)单独的传感器的信息,以便最终提取对象信息。根据始发its-s的站类型,可以使用不同的容器规范来对传感器的属性进行编码。
[0062]
传感器信息容器类型提供了提供有关传播方its-s的传感属性的描述性信息的可能性。向每个描述的传感器提供假名id,该假名id进而在感知对象容器中使用,以将测得的对象信息与特定传感器相关。此外,每个提供的传感器信息df伴随着传感器分类,以指示感知系统的类型。这可以是特定的传感器类型,诸如雷达或激光雷达传感器,也可以是从多个传感器提供融合对象信息的系统。由于不同的传感器类型可附接到its-s(例如,雷达、激光雷达、组合传感器融合系统等),因此该容器为描述传感器系统的属性提供了不同的可能性。vehiclesensor(交通工具传感器)类型描述提供有关安装至交通工具的传感器的信息。这些感知系统的属性是通过提供传感器相对于交通工具上特定参考点的安装定位来定义的。可以提供范围以及水平和垂直张角来描述传感器的锥体。如果传感器具有多个检测区域,诸如组合的长距离和中距离传感器,则可以对传感器的多达十个感知区域进行编码。提供的距交通工具上参考点的偏移量用作特定于传感器的局部笛卡尔坐标系的原点。传感器信息容器的附接频率低于其他容器(参见例如,[r01]、[r02])。可以添加多达十个这种类型的容器。
[0063]
图5示出了根据各实施例的传感器信息容器组件500a的示例。在该示例中,图3的cpm 300中的传感器信息容器(sensinginfocontainer(感测信息容器))可以包括一个或多个感测信息容器组件500a。感测信息容器提供共享(原始)数据和共享数据的描述。如图5所示,感测信息容器可以包括传感器id和格式信息(子)容器、公共数据信息(子)容器、可变长度记录(子)容器和/或点数据记录(子)容器。
[0064]
返回参考图3,可以针对每个已被its-s感知的对象添加感知对象容器。感知对象容器相对于传播方its-s提供检测对象的信息。还可以提供与道路数据匹配的分类和定位。
如果根据[r06]中定义的包含规则检测到对象,则添加该容器类型。如由[r06]所指定,在坐标系中提供有关感知对象的位置和动力学状态的信息。可以针对已由its-s感知到的每个对象(例如,多达最大值128个)添加perceptiondata(感知数据)类型的感知对象容器。感知数据类型的感知对象容器相对于传播方its-s提供关于检测对象的信息。
[0065]
必须通过至少相对于站的参考点(对于交通工具的情况,为传播方its-s)在相应坐标系的x/y平面中提供距离和速度来描述每个对象。测量的参考点也作为消息的一部分提供。当r-its-s正在传播cpm时,参考定位是指[r04]中定义的参考定位(例如,交叉路口的任意点)。为每个对象提供测量时间,即所提供的测量信息相对于管理容器中规定的生成增量时间(generationdeltatime)的时间差(参见例如,[r02]的第6.3节)。此外,为每个检测到的对象分配一个对象id(objectid)(参见例如,[r02]的第6.6节)。该id取自一系列单调递增的数字并逐对象地维护,只要感知到对象并将新的传感器测量值分配给该对象。可能的对象id的范围在0与255之间。一旦对象id 255已分配给对象,则下一个对象以循环方式被分配id 0。
[0066]
还针对每个对象提供作为所提供的测量信息相对于管理容器中规定的生成增量时间的时间差的测量时间。测量时间与编码在消息(cpm)中(例如,在generationdeltatime(生成增量时间)de中)的生成增量时间、以及对应于使得有关检测到的对象的状态空间信息可用所在的时间的时间戳有关。生成增量时间与最新参考位置在发送端可用时的最新时间点相对应。接收到消息后,rx基于其当前绝对时间戳计算其自己的本地生成增量时间。接收到的cpm中编码的生成增量时间与本地生成增量时间之间的差异则表示cpm的年龄。然后将接收到的编码的测量时间(tom)加到cpm的年龄以计算编码的对象的时期。正tom表示tom需要被加到rx侧的消息年龄,因为对象的状态空间已经在tx的生成增量时间之前创建并且因此更旧。负tom表示需要从cpm的年龄中减去测量时间,因为所描述对象的状态空间在tx的生成增量时间已被创建之后确定。tom包括传感器或数据融合系统的任何处理时间。在传送融合对象状态信息的情况下,tom参考至此状态空间已被预测到的时间点。
[0067]
其他若干字段也可用于提供对感知对象的更详细描述。例如,可连同对象的偏航角一起在三个维度上提供距离、速度和加速度值。此外,可以提供对象的几何扩展的3d描述。此外,r-its-s可以能够针对特定对象提供相对于map信息的地图匹配结果。此外,还可以包括针对每个对象的分类的字段,这可以允许多维分类和置信度。可以通过以子类置信度为每个对象提供可适用的子类来详细说明每个类。
[0068]
图5示出了根据各实施例的示例感知对象容器组件500b。在该示例中,图3的cpm 300中的感知对象容器(perceivedobjectcontainer)可以包括感知对象容器组件500b。感知对象容器提供从机载传感器(例如,激光雷达、相机和/或其他传感器类型)标识的对象的列表。还可以包括从机载/本地传感器数据(以及从邻居接收的传感器数据)中提取的(多个)感知对象。
[0069]
如图5所示,感知对象容器包括传感器和感知算法信息(子)容器,以及1到n个(其中n是数字)感知对象描述容器,这些感知对象描述容器描述了各个感知对象。这里,感知对象描述容器1承载第一感知对象的描述,并且感知对象描述容器n承载第n感知对象的描述。传感器和感知算法信息(子)容器指示its-s采用的机载/本地传感器的(多个)类型以及its-s用于感知对象1-n和在相应的1-n感知对象描述容器中提供相应的描述的(多个)感知
算法。此外,感知对象容器可以包括与感知对象描述容器相对应的1-n个原始传感器数据容器(其中n是数字)。例如,原始传感器数据容器1可以承载用于检测感知对象描述容器1中描述的感知对象的原始传感器数据,而原始传感器数据容器n可以承载用于检测感知对象描述容器n中描述的感知对象的原始传感器数据。
[0070]
返回参考图3,可以附接自由空间附录容器以表达特定传感器的detectionarea(检测区域)内某些区域的不同置信度水平。仅在相对于sensorinformationcontainer(传感器信息容器)中提供的各向同性置信度水平指示需要更改置信度指示的情况下才需要添加此容器。因此,即使接收到的cpm不包含传感器信息容器,自由空间附录容器也可以被解释。当传感器无法利用其整个检测区域来可靠地提供自由空间指示时,或者在[r02]的第6.5条中详述的阴影模型不适用于特定对象的情况下(例如,雷达传感器测量两辆彼此后面行驶的交通工具的情况下),可能是这种情况。
[0071]
自由空间附录容器有两种可能的应用。例如,在传感器信息容器中提供了具有第一置信度水平(l1)的各向同性自由空间。第一置信度水平(l1)并非适用于传感器的整个检测区域(例如,fov)。相反,对象后面的部分计算阴影区域含具有第二置信度水平(l2)的不同自由空间置信度(例如,作为传感器融合过程的结果)。在freespacearea(自由空间区域)df中提供具有第二置信度(l2)的区域作为freespaceaddendum(自由空间附录)容器的一部分(例如,freespaceaddendumcontainer_1(自由空间附录容器_1),其中shadowingapplies:false(阴影应用:假))。此外,传感器系统只能为其检测区域(例如,fov)内的受限区域提供自由空间置信度指示。第三置信度水平(l3)应用于检测区域之外的区域(例如,fov),该区域在附加的自由空间附录容器(例如,freespaceaddendumcontainer_2(自由空间附录容器_2),其中shadowingapplies:true(阴影应用:真))中提供。
[0072]
自由空间附录容器的阴影应用de用于指示计算对象后面阴影区域的跟踪方法是否也适用于自由空间附录容器中描述的区域。当tx its-s也提供自己的尺寸时,tx its-s占用的区域被视为已占用。有关tx its-s的几何尺寸的信息可以在cpm或附加传送的消息(诸如cam)中提供。
[0073]
cpm中为每个传感器提供的自由空间附录容器的顺序以升序覆盖同一传感器的重叠自由空间附录容器的置信度水平指示。例如,如果置信度水平指示l3与置信度水平l1(例如,来自传感器信息容器)和l2(例如,来自第一自由空间附录容器)重叠,因此代表规定区域内的主要置信度水平指示。
[0074]
置信值为0的自由空间附录容器可能部分位于检测区域之外。通过在检测区域之外提供自由空间附录容器,可以利用更简单的自由空间区域形状来减小消息大小。自由空间附录容器的强制性自由空间置信度de表示适用于自由空间区域df中提供的区域的自由空间置信度。传感器id列表链接到相对应的传感器信息容器并且可以被提供来指示哪个传感器提供了相对应的自由空间置信度指示。
[0075]
图4示出了根据各实施例的经修改的cpm 400。经修改的cpm 400包括(多个)传感器信息容器(sic)、(多个)感知对象容器(poc)和(多个)自由空间附录容器(fsac)(如先前关于图3所讨论的),并且包括用于在邻居(或邻近的its-s)之间共享分层成本地图的新的容器分层成本地图容器(layeredcostmapcontainer)。
[0076]
感知数据类型的分层成本地图容器代表用于共享由its-s感知作为基于成本的占用网格的整体动态环境的一个选项。分层成本地图容器在某些情况下可能更有效,这些情况诸如在tx its-s的传感器的fov中存在大量对象或对象的重叠视图或对象的遮挡。在此类情况下,基于集体感知的分层成本地图或占用网格可能是带宽和计算高效的。在一些实施例中,(多个)分层成本地图容器可以替换或补充先前讨论的(多个)感知对象容器和/或(多个)自由空间附录容器。
[0077]
分层成本地图容器容器(或reducedcostmapcontainer(缩减的成本地图容器))包括关于共享感知主层成本地图(例如,分别为图1和图2的主层150和250)和支持层成本地图信息的信息。如前所述,可以在its-s上准备多个成本地图层。its-s可以共享多个成本地图层,例如,cpm 400中的1到n个成本地图层(其中n是数字,其可以基于设施层包括或指示的一个或多个配置参数)。在各实施例中,cpm 400可以由its-s中的cps模块生成。cps模块可以是设施层实体,如下文更详细讨论的(参见例如,图10、11和12)。cps模块还可以控制和/或协调(多个)cpm的传送。下文提供了具有用于包括分层成本地图容器的新数据帧(df)和数据元素(de)的cpm的示例实现。
[0078]
根据各实施例,将感知数据类型的分层成本地图容器添加到一个或多个cpm 400以共享由tx its-s感知的整体动态环境(例如,分别为图1和图2的分层成本地图100和200)。将分层成本地图容器添加到(多个)cpm 400使得能够在cps下的邻近its-s之间紧凑且有效地共享感知环境。分层成本地图容器是感知数据类型的。容器考虑成本地图的基于网格的表示,其中每个单元携载成本(例如,指示行进通过单元是安全、注意或致命的)或特定类型的障碍物、对象、易受伤害的道路使用者(vru)存在于单元中的概率。its-s可以遵循具有相同大小的单元表示和/或单元表示的分层网格大小的全局网格。在分层单元大小中,单元大小是彼此的整数倍。每个its-s为其fov(和/或由its-s实现的各种传感器的fov)中指定尺寸的矩形大小准备成本地图,其中区域(例如,矩形区域)被进一步划分为更小的(例如,矩形)单元。例如,指定尺寸可能是n个单元乘m个单元,其中n和m是数字。在各实施例中,通过提供作为分层成本地图容器的一部分的区域矩形df来描述该矩形区域。每个单元的尺寸由网格单元大小x(gridcellsizex)和网格单元大小y(gridcellsizey)de描述。在一些实施例中,正方形区域可用于成本地图区域以及单元。但是,成本地图区域和单元都可以是矩形尺寸。
[0079]
每个单元的成本由tx its-s基于其本地(例如,机载或嵌入式)传感器或从本地传感器获得的传感器数据、邻居共享的信息(例如,由邻居通过cpm交换)以及tx its-s可用的静态地图来进行计算。可以增加一些附加成本以提高安全性。例如,可以为vru周围的单元(它们是自由空间)增加附加成本,以尊重个人空间和/或vru的舒适度。对于一些需要在其周围设置缓冲区的对象(例如,陡峭的道路、道路上可以被风吹动的垃圾桶、掉落的树枝等),可以为这些对象周围的单元(它们是自由空间)增加附加成本。每个单元的成本由分层成本地图容器中的一个或多个成本地图网格值(costmapgridvalue)df描述。
[0080]
每个tx its-s可能已经准备了多个层或类型的成本地图,如图1和图2所示。如前所述,主层类似于单片占用网格或成本地图。主层由其他层准备,如图1和/或2所示。静态成本地图层维护有关静态或半静态对象和路边基础设施的信息。而其他层的成本地图由于动态对象和这些对象的安全要求而维护成本。
[0081]
tx its-s共享主成本地图层并且可以共享一个或多个其他层,这取决于带宽、接入层拥塞信息和/或其他约束,诸如时序要求等。每个共享的成本地图层类型由成本地图层类型df指定。协作请求成本地图层使tx its-s能够请求邻居帮助提高一些单元的成本,对于这些单元,tx its-s不具有确定值的高置信度水平。差异处理成本地图层能够指示并解决邻居之间的感知差异。多数投票是一种选项,其中每个单元的成本值通过多数投票达成一致。在邻居之间的成本地图存在差异的情况下,如何利用邻居成本地图报告取决于tx its-s融合算法实现方式。在一些情况下,当启用成本地图共享时,tx its-s可准备不同大小的成本地图或与tx its-s自己使用的相同大小的成本地图。由于邻居位于不同的位置/车道和/或前进方向按不同的方向,因此共享成本地图可能需要更改成本地图的尺寸而不是准备自己使用的尺寸。
[0082]
图5示出了根据各实施例的分层成本地图容器组件500c的示例。在该示例中,图4的cpm 400中的lcm容器可包括lcm容器组件500c。lcm容器组件500c包括成本地图头部信息容器中的成本地图头部信息。成本地图头部信息可以包括例如,成本地图记录id(每次更新占用网格后分配的id或序列号(例如,递增的整数));时间戳占用网格(指示上次更新主成本地图的时间)、帧id(与该数据关联的帧的id)、支持层数(指示除主成本地图之外包含的层数;如果只有主成本地图,则设置为“0”),等等。
[0083]
lcm容器组件500c还包括主成本地图容器,其包括各个de/df中的成本地图元数据和成本地图数据,并且还可以包括支持层成本地图容器中包括的一个或多个其他层。成本地图元数据可以包括关于成本地图数据的信息,诸如成本地图层类型(指示成本地图层的类型)、成本地图更新时间(指示消息的生成增量时间到成本地图层最后一次更新时间的时间差)、每网格单元成本地图值配置类型(指示用于指示成本地图格式的各种选项)。这些格式在指定每个网格单元的成本地图值、每网格单元置信度水平配置类型(指示用于选择置信度水平值格式的各种选项)所需的大小(位数)方面也有所不同。这些格式在指定每个网格单元的置信度水平等所需的大小(位数)方面也有所不同。也可以包括任意数量的变量长度记录(vlr)。这些vlr可包括投影信息、元数据、波形分组信息和用户应用数据。
[0084]
在各实施例中,cpm 300和400可以使用asn.1(参见例如,itu-t推荐x.680)方案或一些其他合适的语言来定义。此外,未对齐的打包编码规则(uper)可用于有效载荷的序列化。下文提供了这些容器的内容物及其de和df的详细信息。i.b.2.cpm分发实施例
[0085]
etsi en 302 636-3版本1.2.1(2014年12月)中规定的点对点和/或点对多点通信可用于传送cpm。i.b.2.a.cpm生成频率管理方面
[0086]
cpm生成事件引起生成一个cpm(例如,分别为图3、4、6或7的cpm 300、400、600或700)。生成的cpm可以根据[r01]中的第6.1.5节和/或如本文所讨论的进行分段。连续cpm生成事件开始之间经过的最短时间应等于或大于:t_gencpm。t_gencpm受限于:t_gencpmmin≤t_gencpm≤t_gencpmmax,其中t_gencpmmin=100ms并且t_gencpmmax=1000ms。
[0087]
在its-g5的情况下,t_gencpm应根据etsi ts 102 724版本1.1.1(2012年10月)中规定的分散拥塞控制(dcc)的信道使用要求进行管理。参数t_gencpm应由管理实体以毫秒
为单位提供。如果管理实体提供该参数的值高于t_gencpmmax,则t_gencpm应设置为t_gencpmmax,而如果该值低于t_gencpmmin或未提供该参数,则t_gencpm应设置为t_gencpmmin。参数t_gencpm表示连续cpm生成事件之间经过的时间的当前有效上限。在3gpp c-v2x pc5的情况下,可以根据etsi ts 103 574版本1.1.1(2018年11月)中接入层定义的拥塞控制机制来管理t_gencpm。
[0088]
dcc算法可用于限制在拥塞情况下对信道的访问。因此,cpm生成规则可能受到接入层dcc的影响。结果,cpm可能被接入层dcc丢弃。如果该分组丢弃指示被反馈到cpm生成功能,则该反馈可用于重新考虑将被丢弃的分组中的对象添加到要为下一个cp消息生成事件选择的对象池中。反馈机制可以采用etsi ts 103 175版本1.1.1(2015年06月)中详述的跨层dcc功能的规定。i.b.2.a.1.感知对象容器包含管理
[0089]
作为生成事件的一部分生成的cpm可以包括通过将感知对象df添加到感知对象容器来包括发射方its-s当前已知的感知对象的信息。
[0090]
从its-s对象列表中选择具有足够置信度且不受冗余缓解技术(参见[r02]的第4.5节)约束的对象,如果对象符合以下情况中的任一项,则应作为当前cpm生成事件的结果进行传送:1)如果分配的最高置信度对象类别与人或动物类别都不相对应:a)在最后一次cpm生成事件之后,感知系统首次检测到对象。b)对象参考点的当前估计位置与最后包含在cpm中的该对象参考点的估计位置之间的欧氏绝对距离超过4m。c)对象参考点的当前估计绝对速度与最后包含在cpm中的该对象参考点的估计绝对速度之间的差超过0.5m/s。d)对象参考点的当前估计绝对速度的向量的方向与最后包含在cpm中的该对象参考点的绝对速度的向量的估计方向之间的差超过4度。e)自最后一次将对象包含在cpm中以来经过的时间超过t_gencpmmax。2)如果分配的最高置信度对象类别与人或动物类别相对应:a)在最后一次cpm生成事件之后检测到新对象(人或动物类别)。b)如果对象列表中至少包含一个过去500ms内未包含在cpm中的人或动物类别的对象,则人或动物类别的所有对象都应包含在当前生成的cpm中。人或动物类别的对象的生成规则确保之前包含的这两个类别的对象没有单独的包含循环,以减少消息生成频率。
[0091]
为了进一步减少生成消息的数量,在每个消息生成事件中,被包含在下一生成事件中的cpm中(例如,在t_gencpm之后)不属于人类或动物类别的对象可能已经被包括在当前生成的cpm中。为此,在当前生成的cp消息中未被选择用于传送的对象被预测到下一个cp消息生成事件(例如,在t_gencpm之后),例如,假设恒定速度模型。在此预测之后,所有在下一生成事件中需要包含在cpm中的对象也应该被选择包含在当前生成的cpm中。i.b.2.a.2.传感器信息容器包含管理
[0092]
每当自最后一次cpm包含传感器信息容器起经过的时间等于或大于t_addsensorinformation(t_添加传感器信息),则作为生成事件的一部分生成的cpm应包含传感器信息容器,其中t_addsensorinformation=1000ms。i.b.2.a.3.自由空间附录容器包含管理
[0093]
cpm中确认的自由空间可以作为传感器信息容器的一部分来指示。[r02]的第6.7条详细说明了如何组合自由空间指示(传感器信息容器中的自由空间置信度de)和描述的对象,以通过使用跟踪和阴影方法来导出自由空间。每当使用[r02]的第6.5和6.7节或
[r01]的第7.5和7.7节中详述的简单跟踪方法在接收器端计算的自由空间区域未反映所检测的its-s生成cpm的自由空间时,应添加自由空间附录容器。对于静态信息(诸如永久阴影区域),每当将传感器信息容器添加到当前生成的cpm时,应该添加自由空间附录容器。
[0094]
作为生成事件的一部分生成的cpm可以通过向自由空间附录容器添加自由空间附录df来包括关于发射方its-s已知的被监测的自由空间区域的附加信息。如果在接收方its-s上计算自由空间区域的简单跟踪方法与发射方its-s上检测到的自由空间的表示不匹配,则应将特定的自由空间附录添加到cpm。在cpm中连续包含自由空间附录取决于:
[0095]
1)如果特定的自由空间附录df使用区域多边形(areapolygon)df:如果多边形的任何偏移点相对于最后包含在cpm中的该多边形的相对应偏移点的欧几里德相对距离超过阈值数量/值(例如,4m等)或如果用于描述多边形的偏移点的数量变化,则应将自由空间附录添加到当前cpm。区域多边形df描述了通过按提供的序列连接提供的偏移点构造的多边形区域。最后一个点应与第一个点连接以闭合所描述的区域。区域多边形df应包括以下信息:polypoint(距its-s参考位置的一系列偏移点)。
[0096]
2)如果特定的自由空间附录df使用区域圆形df、区域椭圆形df或区域矩形df:
[0097]
a)如果所描述的自由空间区域的节点中心点的当前欧几里德距离与相同描述的、并最终包含在cpm中的自由空间区域的节点中心点的欧几里德距离之间的差超过阈值量/值(例如,4m等),则应将自由空间附录添加到当前cpm中。
[0098]
a)如果所描述的自由空间区域的当前半径或半范围长度与最后包含在cpm中的相同描述的自由空间区域的半径或半范围长度之间的差超过阈值量/值(例如,4m等),则应将自由空间附录添加到当前cpm。半径de包括圆形的传感器区域的半径。半范围长度de表示椭圆或矩形轴的长度,并且用于描述特定方向的延伸。
[0099]
c)如果所描述的自由空间区域的当前半主要范围定向与最后包含在cpm中的相同描述的自由空间区域的半主要范围定向之间的差超过阈值量/值(例如,4度等),则应将自由空间附录添加到当前cpm。半主要范围定向de指示传感器区域椭圆/矩形的椭圆或矩形主要范围相对于北向(例如,wgs84北等)的定向。
[0100]
在上述任何一个中,区域圆形df描述以its-s的参考点或以节点中心点(如果提供)为中心的圆形区域。区域圆形df可以包括以下信息:节点中心点(圆相对于its-s的参考位置居中的偏移点)和半径(指示圆形区域的半径)。区域椭圆形df描述了椭圆区域。椭圆以its-s的参考点或节点中心点(如果提供)为中心。区域椭圆形df可以包括以下信息:节点中心点(椭圆相对于its-s的参考位置居中的偏移点)、半主要范围长度(椭圆的主要半径;具有半范围长度值)、半次要范围长度(椭圆的次要半径;具有半范围长度值)和半主要范围定向(椭圆的半主要范围长度在合适的坐标系中的定向)(例如,wgs84等;具有wgs84角度值(wgs84anglevalue)值)。
[0101]
区域矩形df描述了以its-s的参考点或节点中心点(如果提供)为中心的矩形区域。区域矩形df应包括以下信息:节点中心点(矩形相对于its-s参考位置居中的偏移点)、半主要范围长度(矩形的一半长度;具有半范围长度值)、半次要范围长度(矩形的一半宽度;具有半范围长度值)和半主要范围定向(矩形的半主要范围长度在合适的坐标系中的定向)(例如,wgs84等;具有wgs84角度值(wgs84anglevalue)值)。i.b.2.a.4.分层成本地图容器包含管理
[0102]
作为生成事件的一部分生成的cpm(例如,分别为图3的cpm 300、图4的cpm 400、图6的cpm 600或图7的cpm 700)可以包括通过将分层成本地图容器添加到cpm而在tx its-s上可用的更新的分层成本地图(例如,分别为图1和2的成本地图100和200)。当感知到大量对象,感知到对象的重叠视图,和/或标识tx its-s处传感器的fov中的对象遮挡时,具有一个或更多成本地图层的分层成本地图容器包含在cpm中(参见例如,图4的cpm 400)。
[0103]
主成本地图层(例如,分别是图1和图2的主层150和250)连同零个或多个其他成本地图层包含在cpm内(参见例如,图1和2),其他成本地图层诸如静态成本地图层、感知障碍物成本地图层、膨胀成本地图层、邻近成本地图层、注意/事故成本地图层、体素成本地图层、声纳成本地图层、差异处理成本地图层和/或协作请求成本地图层。例如,如果有在其周围需要缓冲区的感知对象(例如,陡峭的道路、道路上可以被风吹动的垃圾桶、掉落的树枝等),则膨胀成本地图层连同主成本地图层一起被包括在cpm中的分层成本地图容器df中。如果已检测到一个或多个vru对象(例如,行人、骑自行车者、动物等),则感知障碍物成本地图层(例如,图1的层102)也连同主成本地图层(例如,图1的层150)一起被包括。
[0104]
在以下条件下,作为当前cpm生成事件的结果,选择一个或多个成本地图层用于传送。
[0105]
在检测到针对包括附加层的不止一个条件的情况下,那么那些附加层连同主层一起被包括在cpm中。例如,如果存在需要缓冲区的感知对象并且已检测到一个或多个vru类别对象,则膨胀层和感知对象层两者都被包括在主成本地图层中。根据检测到的事件/条件,可以包括其他层组合。
[0106]
如果在最后一个cpm生成事件之后感知系统首次检测到一个或多个新对象,导致感知障碍物成本地图层(例如,图1的感知障碍物层102)和主成本地图层(例如,图1的主层150)发生变化,则在当前cpm中的分层成本地图容器df中仅包括主成本地图层。
[0107]
如果在最后一个cpm生成事件之后感知系统首次检测到一个或多个新对象,导致感知障碍物成本地图层(例如,图1的感知障碍物层102)和主成本地图层(例如,图1的主层150)发生变化,则在当前cpm中的分层成本地图容器df中包括感知障碍物成本地图层和主成本地图层。
[0108]
如果在最后一个cpm生成事件之后感知系统检测到在其周围需要缓冲区的一个或多个新对象,导致膨胀成本地图层(例如,图1的膨胀层103)和主成本地图层(例如,图1的主层150)发生变化,则在当前cpm中的分层成本地图容器df中包括膨胀成本地图层和主成本地图层。
[0109]
如果感知障碍物成本地图层(例如,图1的感知障碍物层102)或膨胀层(例如,图1的膨胀层103)在过去的x毫秒内没有直接或经由主成本地图层(例如,图1的主层150)被包括在cpm中,其中x是数字(例如,500毫秒),则感知障碍物成本地图层或膨胀层直接或间接地经由主成本地图层被包括在当前cpm中的分层成本地图容器df中。
[0110]
如果tx its-s标识与其当前成本地图网格的[x]%(其中x是数字)以上相对应的单元的成本地图值与邻居报告的值相差超过阈值并且自tx its-s的最后一次cpm传送以来邻居尚未报告此类差异,则tx its-s可以发送其在当前cpm中的差异处理成本地图层(例如,图1的差异处理层105)。
[0111]
如果tx its-s标识其与感知系统检测到的vru相对应的当前单元的成本地图值与
邻居报告的值相差超过阈值,并且自tx its-s的最后一次cpm传送以来邻居尚未报告此类差异,则tx its-s发送其在当前cpm中的差异处理成本地图层。
[0112]
如果tx its-s处的本地可访问(例如,机载)传感器在其当前的成本地图网格的[y]%以上(其中y是数字)未确定高于阈值置信度值的置信度水平的感知,并且tx its-s在其最后一次(例如,先前的)cpm传送中未包括协作请求成本地图层(例如,图1的协作请求层106),则tx its-s可以发送当前cpm中的协作请求成本地图层。
[0113]
如果在tx its-s的最后一次cpm传送之后该tx its-s从请求帮助确定特定成本地图层中一些单元的成本值的邻居接收到协作请求成本地图层,则tx its-s具有一些或所有请求的单元的值,并且这些成本值的置信度水平高于其他邻居对此协作请求的任何其他响应。its-s在当前cpm中包含该特定成本地图层。
[0114]
如果在tx its-s的最后一次cpm传送之后,邻居通过发送“协作请求成本地图层”请求帮助确定特定成本地图层中一些单元的成本值,则tx its-s具有一些或所有请求的单元的值,并且这些成本值的置信度水平高于其他邻居对此协作请求的任何其他响应。its-s在当前cpm中包含该特定成本地图层。
[0115]
在cpm的分层成本地图容器中连续包含一个或多个分层成本地图可能基于以下一种或多种条件:
[0116]
(1)如果待报告的矩形成本地图网格区域的节点中心点的当前欧几里德距离与相同报告、并最终包含在cpm中的矩形成本地图网格区域的节点中心点的欧几里德距离之间的差超过阈值量/值(例如,4米(m)等),则应将分层成本地图容器df添加到当前cpm中。节点中心点de是相对于包含坐标系的水平面中提供的参考位置的位置的x和y偏移,其中y与北向相对应而x与东向相对应。
[0117]
(2)如果待报告的矩形成本地图网格区域的当前半范围长度(例如,一半长度)与相同报告、并最终包含在cpm中的矩形成本地图网格区域的半范围长度之间的差超过阈值量/值(例如,4m等),则应将分层成本地图容器df添加到当前cpm中。如果待报告的矩形成本地图网格区域的当前半次要范围长度(例如,一半宽度)与相同报告、并最终包含在cpm中的矩形成本地图网格区域的半次要范围长度之间的差超过阈值量/值(例如,4m等),则应将分层成本地图容器df添加到当前cpm中。
[0118]
(3)如果待报告的矩形成本地图网格区域的当前半主要范围定向与相同报告、并最终包含在cpm中的矩形成本地图网格区域的半主要范围定向之间的差超过阈值量/值(例如,4度等),则应将分层成本地图容器df添加到当前cpm中。i.b.2.b.cp消息分段方面
[0119]
生成的cpm的大小不应超过cpm最大传送单元(mtu_cpm),cps经由nf-sap支持该单元。例如,mtu_cpm取决于传送cpm的接入层技术(mtu_al)的mtu。mtu_cpm应小于或等于mtu_al减去设施层协议的头部大小(hd_cpm)和联网和传输层协议的头部大小(hd_nt),其中mtu_cpm≤mtu_al-hd_cpm-hd_nt。
[0120]
如果包括所有被选择用于传送的感知对象和成本地图层候选的cpm的大小超过cpm最大传送单元(mtu_cpm),可发生消息分段,如本文中讨论的和/或[r01]和/或[r02]中讨论的。应该在不需要接收所有段的情况下解释每个消息段。在当前规定[r01]中,所选择的感知对象候选包含在cpm段中,按对象置信度(如果可用)和速度的乘积的降序排列。如果
对象置信度不可用,则仅使用对象速度进行降序排序。
[0121]
每个接入层技术的mtu_al在[r07]和etsi ts 103 613版本1.1.1(2018年11月)及其参考文献中定义。联网和传输层协议的头部由btp头部和地理联网头部组成。btp头部的大小在etsi en 302 636-5-1版本2.2.1(2019年5月)中定义,而每个预期分组运输类型的地理联网协议头部的大小在etsi en 302 636-4-1版本1.4.1(2020年1月)中定义。
[0122]
当asn.1uper编码的cpm(包括选择用于传送的所有感知对象候选)的大小超过mtu_cpm时,可发生消息分段。可以在不需要接收所有段的情况下解释每个消息段。在各实施例中,主成本地图层(例如,分别为图1和图2的主层150或250)被选择为包括在第一段中。所选择的感知对象候选应包含在cpm段中,按对象置信度(如果可用)和速度的乘积的降序排列。如果对象置信度不可用(101),则应仅使用对象速度进行降序排序。只要待生成的段的结果asn.1uper编码消息大小不超过mtu_cpm,就应该用所选择的对象填充段。一旦所有所选择的对象都包含在段中,剩余的成本地图层就被包含在内。剩余的成本地图层要么被包括在具有所选择对象的最后一个段中,要么生成一个或多个新段。段中成本地图层的包含顺序按以下降序排列:主成本地图层、感知障碍物成本地图层、膨胀成本地图层、邻近成本地图层、注意/事故成本地图层、体素成本地图层、差异成本地图层、协同请求成本地图层、集体感知成本地图层、声纳成本地图层和静态成本地图层。以该方式生成段,直到所有所选择的感知对象和/或成本地图层都包含在cpm段中。每个段在下一个传送机会被传送。
[0123]
应该注意,tx its-s可能需要选择更大的成本地图单元大小来减小成本地图层的大小,以便适合单个cpm段。有必要保持每个cpm段可自解释,而无需接收所有或其他段。
[0124]
在传感器信息容器也需要传送的情况下,如果结果asn.1uper编码的cpm段大小不超过mtu_cpm,则应将传感器信息容器添加到cpm段中。在一些实施例中,该过程可导致仅包括传感器信息容器的cpm段的生成。应通过填充感知的对象容器段信息df来指示消息分段。所有消息段应指示同一生成增量时间de。
[0125]
在一个实施例中,当启用成本地图共享时,可以使用以下规定的任何组合,用于在cpm段中包括感知对象和成本地图层候选:应选择主成本地图层以包括在第一段中。然后基于现有的(多个)规定,按照对象的置信度(如果可用)和速度的乘积的降序包含感知对象候选者。一旦所有所选择的对象都包含在段中,剩余的成本地图层就被包含在内。
[0126]
在该实施例中,如果尺寸允许,则剩余的成本地图层或者被包括在具有感知对象的最后一个段中;否则,将生成一个或多个新段以包括所有剩余的成本地图层。附加地或替代地,cpm段中的成本地图层的包含顺序按以下优先级降序排列:主成本地图层、感知障碍物成本地图层、膨胀成本地图层、差异成本地图层、协作请求成本地图层、集体感知成本地图层和静态成本地图层。在另一个实施例中,如果要求cpm段包括所有感知对象和成本地图层候选,则采取以下动作的任意组合:
[0127]
在一个实施例中,cpm中仅包括主成本地图层而不进行分段,并且感知对象和剩余的成本地图层候选被排除在传送之外。在该实施例中,tx its-s可能需要选择更大的成本地图单元大小来减小主成本地图层的大小,以便使其适合cpm。在另一个实施例中,所有成本地图层候选包括在具有最少数量的cpm段的cpm中。在该实施例中,感知对象候选被排除在传送之外。
[0128]
在另一个实施例中,成本地图层可以整体地被包括在段中(例如,成本地图层不能
被分成两个cpm段),使得每个段是可自解释的。在实施例中,如果大小允许,两个或更多个成本地图层可以被包括在同一段中。在这些实施例中,tx its-s可能需要选择更大的成本地图单元大小来减小成本地图层的大小,以便适合单个cpm段。可能有必要保持每个cpm段可自解释,而无需接收所有或其他段。前述实施例中的任何实施例可被组合在各种组合中。i.b.2.c.cpm时间方面
[0129]
cpm生成时间。除了cpm生成频率之外,cpm生成所需的时间和消息构造所用数据的及时性对于数据在接收方its-s中的适用性是决定性的。每个cpm都带有时间戳,以便确保正确解释接受到的cpm。期望不同its-s之间可接受的时间同步。cpm生成所需的时间应小于50毫秒。cpm生成所需的时间是指cpm生成被触发的时间与cpm被递送到联网和传输层的时间之间的时间差(参见例如,图10)。
[0130]
cpm时间戳。由v-its-s传播的cpm中提供的时间戳与确定cpm管理容器df中提供的始发its-s的参考位置的时间相对应。时间戳的格式和范围在etsi en 302 637-2版本1.4.1(2019年4月)(此后为“[r09]”)的第b.3条中定义。r-its-s传播的cpm中提供的时间戳与生成cpm的时间相对应。cpm生成时间与时间戳之间的差应小于32,767ms。设置此要求是为了避免时间戳环绕复杂化。its时间精度可由poti设施层元素提供(参见例如,图10)。i.b.2.d.所提供数据的质量和置信度指示
[0131]
对象包含和置信度:要包含在cp消息中的对象应与其他its-s共享,以提高交通安全。因此,安全应用在接收方its-s时使用共享对象。与交通安全相关的对象要么是静态的(例如,不移动但位于驾驶车道上),要么是动态的(例如,移动或有能力移动)。传送的对象作为cp消息的一部分的目的不是共享和比较交通规则信息(诸如交通标志和交通灯信息)。相反,需要优先考虑有关其他its-s无法使用的对象的数据,因为它们的存在只是暂时的(例如,交通参与者或临时障碍物)。对象需要位于驾驶车道上或车道附近(例如,人行道)。传播方its-s上的地图匹配算法可用于确定对象是否位于车道上。计算对象置信度的方法将在发射方its-s之间保持一致,以确保在接收到cpm时,可以清楚地解释置信度指示。在传感器融合系统中,置信度计算通常是实现方式专有的,并且因此与共享传感器数据时的要求相矛盾。因此,应标识合适的置信度指标(例如,在iso/autosar中),以提供统一的描述。
[0132]
自由空间置信度:接收方(rx its-s)能够将传感器信息容器的报告检测区域与报告的对象相结合,以推导出对象之间的自由空间,如[r02]的第6.5和6.7节所述。为了通告发射方its-s能够提供关于接收移动its-s可能驶入的实际确认空空间的测量,可以使用特定传感器信息的自由空间置信度de。语义分段过程是识别传感器视场内的对象和自由空间的关键步骤(参见例如,schumann等人:“雷达点云的语义分段”,2018年第21届信息融合国际会议(fusion))(2018年7月10日)以及wang等人:“点分段:基于3d lidar点云的实时语义分段”,arxiv:1807.06288v8(2018年9月25日))。取决于所采用的传感器测量和对象融合原理,检测到的对象可以用固定大小的边界框来描述。通过将有关发射方its-s的感知能力的知识(例如,其检测区域)与所接收的检测到的对象相结合,可以通过接收方its-s计算自由空间。对对象和自由空间进行分类时,应通过使用适用的方法(例如,ai/ml技术)确定适用的置信度水平。自由空间的置信度水平可以定义为自由空间检测到的证据数量与指定时间段内检测尝试总数的比,诸如t_gencpmmax。用于语义分段、多传感器数据融合和对象/自由空间置信度水平计算的特定技术大于本文档的范围,并且应使用任何可行的技术。此外,可
以使用[r01]和[r02]中讨论的冗余缓解技术。i.b.3.cps成本地图更新
[0133]
实施例包括用于以比现有解决方案更低的通信开销在相邻/邻近节点(例如,v-its-s、r-its-s等)之间交换cpm的机制。从通信协议的角度来看,应该最小化信道利用率,并且因此,较短的消息大小和较低的传送频率通常是可取的。本文讨论的实施例减少了消息传送频率和消息大小的减小。i.b.3.a.cpm的周期性广播
[0134]
一个实施例包括cpm的周期性广播。在该实施例中,产生具有周期性t
cpm
的周期性cpm(或推送以发射到网络和传输层和/或接入层(参见例如,图[r01])),其中t
cpm
在cpm管理实体提供的两个最小和最大周期性参数之间选择(例如,t
cpm_min
=100ms并且t
cpm_max
=1s)。t
cpm
可以基于网络拥塞级别/测量(或信道拥塞级别/测量)、(多个)感知对象的质量(置信度)水平/测量、感知对象的安全相关性(例如,需要更频繁发射的行人、移动物体/生物的检测)、地理定位(例如,更频繁地在交叉路口、野生动物易出没区)、邻居表中的节点密度、通信层(l2)的资源选择方案和/或其他类似参数来确定。
[0135]
例如,如果网络/信道高度拥塞,则可以选择等于或接近t
cpm_max
的t
cpm
。网络拥塞可以根据当前使用的通信协议进行测量,可以反馈给cpm模块选择t
cpm
。例如,在3gpp v2v模式-4通信中,每个节点在每次传送之前以分布式方式测量拥塞级别(信道繁忙率)。通过提出通信协议与cpm模块之间的接口,可以将此类测量的拥塞级别转发给cpm模块。节点(在v2x模块处)也可以通过在滑动窗口上保存已知周期性消息(例如,hello(你好)/cam/bsm消息)在网络中的成功率历史记录来估计网络/信道拥塞。节点通常可以知道来自邻居的此类消息的周期性。来自邻居的此类消息的接收成功率可以给出网络拥塞的级别。
[0136]
在另一个实施例中,可以基于交通工具位置的地理区域(诸如在繁忙的交叉路口附近或在野生动物易出没地区)选择t
cpm
,可以选择较短的t
cpm
以更快地检测任何潜在的安全危急情况。在一些实施例中,可以基于不止一个上述因素来选择t
cpm
。i.b.3.b.增量/差量cpm与完整大小周期性cpm的广播
[0137]
在许多情况下,如果所有节点保持传送周期性的完整大小的cpm,特别是如果cpm大小较大而t
cpm
较小,则可能产生显著的通信开销。例如,在繁忙的交叉路口,邻居密度非常高并且感知环境也可能变化得更快(由于多条行人人行道、多条车道相互交叉、左/右转弯等),可能需要更大的cpm大小和更小的t
cpm
。然而,由于节点密度高,以较小的周期传送较大的cpm在通信开销方面可能是昂贵的。在各实施例中,在此类情况下以更长的周期传送完整大小cpm。在各实施例中,在两个完整大小cpm之间仅传送(较小尺寸的)差量/部分/增量cpm。
[0138]
增量与完整大小周期性cpm。完整大小cpm是包括全列表感知对象的cpm。在实施例中,完整大小cpm可以以更长的周期来传送,而增量(例如,仅新对象和/或高安全风险对象)可以被推送到两个连续的全列表之间传送。增量/部分cpm传送的周期可以是完整大小cpm周期的子整数倍。完整大小cpm的周期可以选择等于或接近t
cpm_max
。如果不需要增量传送,可以跳过此类传送。
[0139]
增量cpm可以包括来自以下部分或全部的信息:在完整大小cpm传送后检测到新对象;检测到对象绝对位置的变化大于预先指定的阈值,并且该对象之前在完整大小cpm传送
期间被感知为静态的;和/或在完整大小cpm传送之后检测到对象的速度/前进方向的变化大于预先指定的阈值,并且该对象之前被感知为动态的。
[0140]
增量cpm的内容也可以基于包含在来自邻居的cpm中的对象列表来确定。可以在增量cpm中跳过来自大多数具有相同或相似属性(例如,由本地传感器感知到的相同的位置、尺寸、前进方向)的邻居的cpm中存在的对象。另一方面,如果感知对象的属性在各邻居中彼此不同,则可以应用此类对象的重新感知并将其包含在即将来临的增量cpm中。
[0141]
具有不同大小的增量/差量cpm可能影响l2通信协议,诸如3gpp c-v2x模式4。特别是,消息大小的变化时的半持久性资源预留。在大小在几个周期后半静态变化的情况下,可以考虑使用相同大小的增量cpm。完整cpm的大小也可以在几个周期内保持不变,以允许无线电接入层为即将来临的周期预留相同或相似数量的资源。i.b.3.c.事件触发的cpm广播
[0142]
在实施例中,事件触发的cpm(et_cpm)可以响应于事件的检测(诸如安全危急场景或对象的检测)而被传送。et_cpm至少包括事件相关的数据,诸如(多个)安全危急感知的对象。在一些实施例中,除了周期性cpm之外,还传送et_cpm。在这些实施例中,可以在检测到安全危急事件之后立即传送安全危急et_cpm。
[0143]
安全危急事件可包括,例如,检测到车道旁边具有移动能力的对象(例如,垃圾箱、滑板、丢失的货物等)、高风险/相关性vru(例如,道路工人、警察特工、应急人员、消防队等)、动物突然跳入/进入道路、孩子靠近道路等都可以视为触发et_cpm立即传送的事件。
[0144]
有时,邻居的感知可能相互冲突并且可能需要解决混淆,或者对手节点故意报告错误的感知。在该情况下,可触发多数投票,并且可要求邻居重新感知特定场景/对象并共享感知结果。在该情况下传送et_cpm。i.b.3.d.单播或多播cpm传送
[0145]
在节点(例如,its-s a)接收到来自相邻节点(例如,its-s b)的广播消息后,its-s a可能对感知对象的特定细节(例如,与包含在its-s b的cpm中的感知对象相关联的原始数据)感兴趣。在各实施例中,its-s a可以发送请求以获得此类细节,并且its-s b将所请求的细节作为专用单播cpm发送。
[0146]
在另一个用例中,节点(例如,its-s a)的视场被它前面的对象(例如,诸如卡车或公共汽车之类的大型交通工具)遮挡,可以请求来自相邻节点b或另一个相邻节点c的较长时间的特定的感知数据(例如,传感器数据)。在一个示例中,节点c可能是its-s a前面的阻碍大型交通工具。its-s b或its s c然后可以发送带有请求数据的cpm作为单播传送。如果多个its-s向its-s b和/或its-s c请求此类数据,则its-s b和/或its-s c可以发送(多个)cpm作为组播(多播)传送。
[0147]
cpm的单播/组播传送允许其他邻居同时对数据进行传送,这对于例如具有半双工无线电的邻居特别有利。i.b.3.e.减少冗余cp数据的cpm传送
[0148]
邻近或相邻的its-s(例如,两个或多个its-s靠近和/或彼此相距某个定义的距离内)可能具有(多个)重叠的视图和/或具有相同或相似的质量的相同或相似的感测能力(例如,多个its-s可能以相对高的质量感知相同的对象)。在此类情况下,如果每个邻居发送带有多个或所有感知对象的周期性cpm,由于它们携载冗余信息,因此可能产生不必要的通信
开销。根据各实施例,邻居彼此协调以通过避免传送具有相似质量的相同感知内容来减小cpm大小。
[0149]
在实施例中,(多个)cpm传送可用于减少附近感知对象的冗余传送。在这些实施例中,单独的邻居(或每个邻居)传送具有所有感知对象和这些对象的所有置信度水平的完整大小cpm。然后在下一个周期中,感知对象仅由在先前传送的cpm中报告了最高置信度水平的邻居之一包含在cpm中。
[0150]
如果不止一个邻居报告了相同的置信度水平(例如,最高值),则最先传送cpm的邻居包括感知对象。由于层2(l2)的cpm生成和传送调度可能有延迟,因此稍后生成cpm的节点可能能够较早地传送cpm。在该情况下,具有最高置信度水平的不止一个节点可包括共同的感知对象。在该情况下,本周期能够传送公共对象的节点也将在下一个周期传送。
[0151]
由于各个邻居的接收覆盖范围不同,由于上述减少或消除邻近感知对象的冗余传送的机制,因此邻近的某些节点可能无法获得所有感知对象。为了解决该问题,单个节点(或每个节点)以更长的周期周期性地传送(多个)完整大小cpm。在两次完整大小cpm传送之间,邻居可以应用该机制来减少或消除邻近感知对象的冗余传送。
[0152]
例如,当节点a现在以比节点b提供的当前最高置信度水平更高的置信度水平感知对象x时,具有新的最高置信度水平的节点a在其下一个cpm中使用新的置信度水平值传送对象x信息。节点b在接收到来自节点a的cpm后,从下一次传送开始停止传送cpm中的对象x。在另一个实施例中,节点a等待下一个完整cpm传送,之后节点b停止传送对象x。可以应用类似的方法来减少邻近其他感知的cpm内容的冗余传送。i.b.3.f.数据生产方与数据消费方(接收方)之间的通信网络负荷优化协商
[0153]
共享感知有时可涉及大量数据(例如,如第ib3.d节(“cpm的单播或组播传送”)中所述将原始数据作为单播传送共享)。在此类情况下,使用较短消息的握手应该在请求者与数据提供者之间执行以确保提供者的数据满足请求者的数据质量/类型要求。在交换更大的传感器数据之前,需要程序来协商请求方与提供方之间的数据类型、质量和寿命。
[0154]
例如,在一些情况下,节点a(例如,在接收到来自邻居b的感知对象列表后)可能对来自节点b的原始感测数据感兴趣。原始传感器数据可能非常大,因此节点a和节点b应该在如此大的数据传送之前握手并协商节点b的原始数据是否真的有用,诸如正确的数据类型、阈值质量和/或是否过时。握手进一步允许节点之间的信道估计,从而允许具有更高mcs的高数据速率传送。通常,与广播相比,更高的mcs单播可以显著减少通信资源。
[0155]
在交换大数据之前,可以在数据请求者与数据提供者之间协商数据的类型、寿命和质量的程序下采取以下步骤。
[0156]
首先,节点a向节点b发送请求消息(例如,cpm-请求-msg-单播),其中包含节点a感兴趣的数据(例如,传感器数据y)的描述。节点a可能知道请求的数据可用性来自从节点b接收的广播cpm消息。请求的数据可以是节点b的cpm中感知对象的特定细节(诸如与包含在b的cpm中的感知对象相关联的原始数据)。
[0157]
如果请求的数据y小于阈值(例如,握手-触发-阈值-大小),则节点b使用根据本文讨论的实施例的消息格式将请求的数据作为单播发送。否则(例如,如果请求的数据y大于阈值(握手-触发-阈值-大小)),节点b首先发送握手消息(cpm-握手-请求的-数据-属性)。cpm-握手-请求的-数据-属性携载数据属性,诸如数据大小、数据质量、信息寿命、处理数据
的计算存储能力要求、数据(诸如感知对象)的预期结果等。
[0158]
如果节点a在获取数据属性后不想要数据,则节点a可以发送取消请求(cpm-数据-请求-取消或cpm-握手-请求的-数据-属性-拒绝)。然后节点b不向节点a发送数据。否则节点a发送数据属性接受消息(cpm-握手-请求的-数据-属性-接受)。然后节点b向节点a发送数据。i.b.3.g.触发成本地图更新
[0159]
如前所述,由于成本地图的层具有不同的变化率,成本地图更新频率及其触发器可能受到影响。在各实施例中,可以定义cp认知事件以触发成本地图更新。此类cp认知事件的示例如下:
[0160]
事件1:如果在cpm中从邻居接收到一个或多个新感知对象,其中感知对象位置在成本地图的考虑维度内,并且如果基于本地感测没有歧义或多个邻居不关于感知对象彼此矛盾,则“集体感知层”(例如,图1的集体感知层104)立即更新。如果感知对象导致歧义,首先解决歧义以决定来自邻居的感知对象是否正确(邻居之间达成一致),然后仅更新“集体感知层”成本地图。由于事件1引起的主层更新可以立即完成,也可以跟随主层(例如,图1中的主层150)的定期更新。
[0161]
事件2:如果邻居发送差异处理层(例如,图1的差异处理层105)以指示一些单元的邻居的成本值之间的差异,并且这些单元是否在节点a1的成本地图的维度内,在解决差异之后,节点a1基于这些单元的正确/商定的成本值来更新成本地图层(例如,主层150和/或其他受影响的层)。
[0162]
事件3:如果节点a2发送'协作请求层'(例如,图1的协作请求层106)请求邻居帮助提高节点a2可能没有高置信度水平来确定值的一些单元的成本,并接收来自(多个)邻居的响应,节点a2立即用接收到的成本值更新主层。如果多个邻居以不同的成本值作出响应,则可以应用类似于事件1的多数投票。
[0163]
事件4:如果置信度水平高于某个阈值,则从具有由于缺乏传感器能力而当前未被its-s跟踪的层的邻居接收到成本地图触发立即更新。
[0164]
节点处成本地图的一个或多个层(例如,图1或2的主层、膨胀层等)的显著变化可能触发cpm的生成和传送(例如,et_cpm)。否则,更新的成本地图可以包含在下一个计划的cpm中(例如,周期性cpm)。i.b.3.h.组合来自多个节点的分层成本地图
[0165]
its-s(例如,v-its-s、r-its-s、基础设施its-s、个人/vru its-s等)预计具有gnss电路系统,并且能够推导出或以其他方式确定其gnss参考坐标。在各实施例中,每个its-s基于gnss参考坐标来创建成本地图。在这些实施例中,rx its s将接收到的成本地图的参考点/坐标转换成它自己的参考点/坐标,并相对应地组合或缝合成本地图。
[0166]
在另一个实施例中,各种its-s使用基于网格的参考系统(例如,美国国家网格(usng)参考系统等)来创建分层成本地图。usng以紧凑的、用户友好的格式提供全国一致的“位置语言”,针对本地应用进行了优化(10位数字代表1平方米,8位数字代表10平方米,等等)。在其他国家,可以使用类似的国家电网参考系统。由于基于分层网格的表示,接收节点以较少的计算工作量组合成本地图。在这些实施例中,its s可以基于网络中的拥塞、带宽可用性、传感器能力和/或置信度水平来选择网格的大小。
[0167]
当将较小的网格大小成本地图与较大的网格大小成本地图组合时,如果较小的网格被较大的网格占用,则可以将较大的网格标记为已占用。例如,如果将1m网格成本地图与2m网格成本地图组合,则一个2m网格中有四个1m网格。在该示例中,如果1m网格之一被占用,则整个2m网格被标记为已占用。
[0168]
此外,its-s可以增加有限的成本地图(例如,由于传感器能力,从邻居接收的成本地图具有有限的层)。选择的网格大小是增强成本地图之一。i.b.4.包括成本地图容器的示例cpm实现方式
[0169]
表1-3提供了包括分层成本地图容器的cpm的示例实现方式。表1-3还提供了各种容器的内容以及数据字段(df)和数据元素(de)的描述。在这些实现方式中,de和/或df被包括在cpm管理信息容器中以启用增量cpm传输;用于cp分层成本地图的容器;用于共享来自各传感器的原始数据的容器;以及(多个)感知对象容器内的子容器,以包括相关联的传感器数据以及(多个)感知对象。根据各实施例的de和df的示例被示出为基于在sae-j2735、专用短程通信(dsrc)消息集词典(2016年1月)(以下称为“[r05]”)中定义的消息格式的cpm的以下示例asn.1表示。表1:msg_collectiveperceptionmessage(msg_集体感知消息)
表2:包括分层成本地图容器的示例cpm
表3:包括分层成本地图容器的示例cpm
i.c.包括高对象密度的区域的cps
[0170]
本文的实施例还解决了当前cps[r02]对于特定类型/类别感知对象密度非常高的场景/案例的挑战和潜在低效性。本发明提供了解决这些挑战/低效性的实施例。etsi tr 103 300-1版本2.1.1(2019年9月)和etsi ts 103 300-2版本0.3.0(2019年12月)(例如,存在非常高的易受伤害路边用户(vru)密度的场景)中已标识和探讨了此类特定(多个)类型/类别对象的高密度的一个示例。vru密度非常高的示例场景可能是拥挤的城市交叉口和人行道,大型公共活动(如体育活动/音乐会)附近的交叉路口和人行道,人行道/道路上的一群动物/野生动物/宠物,人行道上的孩子从孩子们的活动/游戏中出来,等等。这导致数十或数百个对象(如行人)穿过/等待穿过交叉路口/斑马线等。类似地,一组骑自行车的人、骑马的人等可以在自行车道、人行道等上作为一个紧密的组移动。在这些场景中,类似类别的对象通常作为一个紧密的组在人行道或道路上行走/停留,其速度或方向保持一致并且其位置在边界区域内。启用将这些对象报告为具有cpm中正确组信息的组的规定可以显著减少cpm开销并提高cps效率。
[0171]
在现有的cps标准中,在上述场景(例如,存在高密度的相同类型/类别的对象,其速度和/或方向一致,并且其位置在感知区域内)中,每个检测到的对象作为个体对象被报告,由于以下原因,这可能不是集体感知的有效方式:
[0172]
它可能产生巨大的通信开销,但在提高its的效率和安全性方面并没有收益或收益微小。由于在此类场景中,对象充当紧密的组,因此提供有关对象组的信息足以让集体感知实现高效、安全的协作驾驶。
[0173]
冗余缓解技术和感知对象的及时共享:在此类情况下,许多its-s将在其cpm中感知并报告具有不同对象id的相同对象/行人/vru(例如,相同对象/vru由不同its-s分配不同id)。为了减少cpm对象列表中的冗余,每个its-s可能需要基于这些对象的其他信息(如位置、尺寸等)对具有针对同一对象(每个对象可能已根据不同its-s分配了不同的对象id)的多个对象id的若干对象进行处理/将该若干对象与its-s自己的感知对象列表比较,以标识冗余。此外,同一对象的感知对象属性可能因its-s不同而不同,这是因为对象可能太近或对象可能具有重叠视图。冗余缓解技术在此类情况下可能无法有效工作。
[0174]
由于现有的冗余缓解[r02]在此类情况下可能无法有效工作,因此,在当前对cpm中最大对象数(128)的限制以及对cpm最大大小的限制(大小可能取决于下层/接入层)的情况下,及时报告所有(或大部分)感知对象可能很困难。共享所有感知对象可能花费若干cpm周期。将对象作为个体实体共享还将在接入层产生巨大的通信开销,特别是如果its-s在此类情况下不能有效地处理冗余的话。
[0175]
作为对象的组进行报告也有助于在此类密集场景中处理感知挑战/错误。例如,对象可能太近,对象可能具有重叠视图等。因此,标识每个个体对象及其属性(如位置、尺寸)可能具有挑战性。组报告可能对此类感知挑战/错误更具稳健性。
[0176]
作为组进行报告也有助于放松cpm生成/传送触发和频率。例如,在已报告的组边界中检测相同分类/类别的新对象可能不需要立即触发新cpm生成/传送。
[0177]
本文中的实施例扩展了现有的cps,以便在同一类别的对象靠近地定位并作为紧邻的组来移动/充当紧邻的组(诸如对于具有相同类型/类别对象的高密度场景)时,能够对其进行组报告。在一些实施例中,多个类别/类型的对象可以包括在同一对象集群中。只有一个类别/类型对象的对象集群可以称为“同构对象集群”,而有多个类别/类型对象的对象
集群可以称为“异构对象集群”。
[0178]
目前在etsi中正在进行的工作是为its实现cps,它提供基本功能以在邻近的v-its-s[r02]之间共享感测能力和感知对象。目前的工作提供了基于广播的cpm共享,这在网络开销方面可能是昂贵的,并且可以针对集体感知进行优化,特别是对于存在高密度相同类型/类别对象的场景。在现有的cps[r02]中,每个感知对象均作为个体对象被报告,由于上面讨论的若干原因,对于存在高密度相同类型/类别对象的场景来说,这可能是非常低效的。现有的cps仍然无法在同一类别对象的位置太近以及它们作为一个紧邻组移动/充当一个紧邻组时将其作为单个实体进行报告。
[0179]
本文中的实施例扩展了现有cps,以便在相同或类似类别的对象的位置彼此相对接近并且它们作为一个紧邻组移动/充当一个紧邻组时能够将其作为单个实体/对象进行组报告,这可用于包括存在相同类型/类别对象的高密度的场景。本文实施例涉及节点之间的消息交换,诸如各种v-its-s、r-its-s和/或vru-its-s之间的cpm交换。本文的实施例也可以应用于诸如etsi和/或3gpp之类的蜂窝标准中。本文的实施例能够实现邻近性(邻近)交通工具之间的集体感知,以实现高效、安全和协调的自主驾驶环境。i.c.1.感知对象集群的示例cpm结构和格式
[0180]
现在参考图6,其示出了根据各实施例的经修改的cpm 600。经修改的cpm 400包括(多个)传感器信息容器(sic)、(多个)感知对象容器(poc)和(多个)自由空间附录容器(fsac)(如先前关于图3所讨论的),并且包括用于在邻居(或邻近的its-s)之间共享对象集群的新的感知对象集群(objectcluster)容器。
[0181]
经修改的cpm 600包括对感知对象集群容器(perceivedobjectclustercontainer)的添加。感知对象集群容器是感知数据(perceptiondata)类型。感知对象集群容器用于报告在相同/相似类别的对象的组或集群的位置彼此接近或邻近时(例如,在某个预定义的距离内等)并且它们作为一个紧密的组移动/充当一个紧密的组时将其作为一个被称为“感知对象集群(perceivedobjectcluster)”的单个实体进行报告。作为一个紧密的组移动/充当一个紧密的组可能涉及具有一致的前进方向和速度、和/或相同或相似的速度和行进方向的对象。i.c.2.生成感知对象集群容器或修改现有对象集群at和its-s
[0182]
图8示出了根据各实施例的用于触发感知对象集群容器的生成的示例过程800。过程800可由its-s中的cps实体执行或操作(参见例如,图10)。过程800开始于操作801,其中cps元件确定cpm生成事件是否已发生。这可以是周期性(时间间隔)检查或响应于特定事件(诸如本文讨论的任何事件)的检测。如果cpm生成事件没有发生,则cps元件循环返回执行操作801以继续监测cpm生成事件的发生。如果发生了cpm生成事件,则cps元件继续进行操作802以确定是否应将任何感知对象分组或聚集到对象集群中。
[0183]
在每个cpm生成事件之前,在操作802,cps元件可确定感知对象的数量是否大于或等于允许在集群中的对象的最小数量(n
min_objectcluster
),以及相同或相似类别/类型的这些感知对象是否(i)彼此的距离小于最小集群距离(d
min_objectcluster
),并且(ii)以相同或相似的前进方向和相同或相似的速度曲线行驶。速度曲线可指示对象的速度和/或加速度。例如,对象之间的速度差可小于彼此之间的最大速度差百分比(v
maxdiff_objectcluster
%),以被包括在集群中。在实施例中,如果cps实体发现大于或等于n
min_objectcluster
(例如,nmin_objectcluster
=2、3、4或一些其他整数值)个相同类别/类型的感知对象(i)位于彼此之间比d
min_objectcluster
(例如,2、3、4或5m或一些其他值)更近的位置,并且(ii)具有相似的前进方向和相似的速度曲线(例如,彼此之间的速度差小于v
maxdiff_objectcluster
%),则cp服务模块触发对象集群容器生成。v
maxdiff_objectcluster
可能需要在一个或多个速度维度上得到满足(例如,对象的xspeed(x速度)、yspeed(y速度)、zspeed(z速度)可能需要在对象集群在x、y和z方向的平均速度的(+/-)v
maxdiff_uuuuobjectcluster
%之内)。在一些实施例中,cps实体可在每次cpm生成之前检查(多个)新的对象集群或现有对象集群中的更新(参见例如,图9)。
[0184]
如果在操作802处cps实体确定感知对象不应被分组到对象集群中,则cps实体进入操作803以生成不具有感知对象集群容器的cpm。如果感知对象应该被集群化,则cps实体进入操作804以触发cpm感知对象集群容器生成,并且然后进入感知对象集群容器生成、传送和接收子过程805。
[0185]
子过程805包括操作806,在操作806中cps实体确定对象集群区域,该对象集群区域覆盖要作为组在对象集群(objectcluster)中报告的所有对象,并收集要包括在感知对象集群容器中的其他信息。在操作807,cps实体生成包括感知对象集群容器并将对象集群区域中的对象从被包括在其自己的感知对象容器中排除的cpm。在操作808,cps实体传送或广播生成的cpm,并且在操作809,cps模块返回到操作801。接收后,邻居还将对象集群区域中相同类别(具有类似前进方向/速度曲线)的任何对象从其cpm的各个对象容器中排除。cps模块可以周期性地检查一个或多个新的对象集群可能性。
[0186]
图9示出了根据各实施例的修改感知对象集群的示例过程900。过程900可由its-s中的cps实体执行或操作(参见例如,图10)。过程900从操作901开始,在操作901中cps元件以与图8过程800的操作801相同或相似的方式确定是否存在cpm生成事件。
[0187]
在操作902,cps元素确定是否应更新或修改任何现有对象集群。cps元素检查(多个)现有对象集群的更新,诸如现有对象集群是否仍然有效(例如,对象集群中更新的对象数≥n
min_objectcluster
),感知对象集群中感知对象数量的变化,和/或对象集群区域中心偏移的变化。
[0188]
例如,如果当前对象集群区域中心的当前欧几里德距离与先前包含在先前cpm中的相同对象集群区域中心的欧几里德距离之间的差超过阈值(例如,4m),则可将更新的对象集群添加到当前cpm中。
[0189]
在另一个示例中,如果对象集群区域的当前半径或半范围长度与先前cpm中包含的相同对象集群区域的半径或半范围长度之间的差超过阈值(例如,4m),则可将更新的对象集群添加到当前cpm中。
[0190]
在另一个示例中,如果对象集群区域的当前半主要范围定向与先前cpm中包含的相同对象集群区域的半主要范围定向之间的差超过阈值(例如,4度),则可将更新的对象集群添加到当前cpm中。
[0191]
在另一个示例中,如果对象集群的当前估计地面速度向量的定向与先前cpm中包含的该对象集群的参考点的地面速度向量的估计定向之间的差超过阈值(例如,4度),则可将更新的对象集群添加到当前cpm中。
[0192]
如果在操作902处cps实体确定不应更新现有对象集群,则cps实体进入操作903,以诸如通过生成不具有对象集群的cpm或执行图8的过程800来在不更新对象集群的情况下
生成cpm。如果应更新现有对象集群,则cps实体进入操作904以触发cpm感知对象集群修改,并且然后进入感知对象集群修改子过程905。
[0193]
子过程905包括操作906,在操作806中cps实体确定覆盖要在更新的对象集群中报告的所有对象的对象集群区域,并收集要包括在感知对象集群容器中的其他信息。在操作907,cps实体生成包括感知对象集群容器并且将对象集群区域中的新对象(新添加到对象集群的对象)从被包括在其自己的感知对象容器中排除的cpm,并包括针对从更新的对象集群中排除的每个对象的感知对象容器。对于从现有对象集群中移除或以其他方式排除的对象,cps模块将这些对象视为包含在各个感知对象容器中。对象集群区域可以调整以排除这些对象和/或也可以收集针对排除的对象的其他信息。排除这些对象后,如果现有对象集群覆盖的对象少于n
min_objectcluster
个对象,则感知对象集群容器将从cpm中被移除,并且此对象集群中的剩余对象将被视为包含在单独的感知对象容器中。
[0194]
在操作908,cps实体传送或广播生成的cpm,并且在操作909,cps模块返回到操作901。接收后,邻居还将更新的对象集群区域中相同类别(具有类似前进方向/速度曲线)的任何对象从其cpm的各个对象容器中排除。cps模块可以周期性地检查一个或多个新的对象集群可能性,并考虑(在更新的对象集群中被排除的)一些对象作为cpm的单独的对象容器进行传送。i.c.3.感知对象集群容器内容/数据
[0195]
在各实施例中,要在对象集群容器中提供的关于对象集群/组的信息可以包括以下数据/信息中的一个或多个:
[0196]
对象集群id(objectclusterid)——与特定对象集群相关联的标识符。
[0197]
对象集群年龄(objectclusterid)——对象集群首次报告时间。
[0198]
测量的时间(timeofmeasurement):对象集群信息最后一次修改的时间——例如,已修改对象集群的任何信息的最近时间。该时间作为所提供的对象集群测量相对于管理容器中所述的生成增量时间的时差提供。在一个实施例中,可以在对象集群中检测到一个或多个新对象,在此类情况下,与最后(最晚)检测到的对象相关联的测量时间可以被视为对象集群的测量时间(例如,最后修改时间)。在另一个实施例中,一个或多个现有对象可以从对象集群中移除(例如,取消保留在对象集群中的资格),在此类情况下,与最后移除的对象相关联的测量时间可以被视为对象集群的测量时间(例如,最后修改时间)。在另一个实施例中,可以检测一个或多个新对象,并且可以从现有对象集群中移除一个或多个现有对象(例如,取消保留在现有对象集群中的资格),在此类情况下,最后发生(最近的最后一次)的检测或移除可以被视为对象集群的测量时间(例如,最后修改时间)。在另一实施例中,对象检测或移除没有改变,然而,对象集群区域的偏移点、速度、前进方向、定向可以改变,从而触发对象集群的信息更新。在此类情况下,此类更改的测量时间可以视为对象集群的测量时间(例如,上次修改时间)。
[0199]
传感器id列表(sensoridlist)
[0200]
对象集群类型(objectclustertype)——同构或异构对象集群
[0201]
对象集群中对象的(多个)类别/类型的名称
[0202]
对象的数量(或每个对象/类别的对象数量)
[0203]
对象集群的对象集群区域(objectclusterarea):
[0204]
对象集群区域的形状和大小。当前cpm[r02]中定义的各种类型的区域(诸如区域矩形、区域椭圆形、区域圆形)可用于指定对象集群区域。在大多数情况下,由于交叉路口、斑马线和人行道的矩形形状,因此区域矩形足以指定对象集群区域的形状和大小。
[0205]
对象集群的位置(对象集群的参考点和参考点相对于报告its-s/交通工具的坐标)。类似的数据元素de(如当前cpm[r02]中定义的各种类型的检测区域)可用于指定对象集群区域。例如,可以通过以下数据元素(de)指定矩形对象区域:
·
节点中心点偏移点(关于报告its-s的矩形区域中心);半主要范围长度(半范围长度)、半次要范围长度(半范围长度)、半主要范围定向(wgs84角度值)、半高度(半范围长度)——对于对象集群,高度将被视为对象集群覆盖的任何对象的最大高度。
·
对象集群检测的聚合置信度水平(例如,对象集群中包含的所有感知对象之间的最小和最大置信度水平)。
·
对象集群的前进方向和速度(所有对象的平均值)。例如,x速度;y速度;z速度,x加速度,y加速度,z加速度,偏航角度,
·
对象集群常量(例如,n
min_objectcluster
、d
min_objectcluster
、v
maxdiff_objectcluster
)。
·
对象集群参数(例如,n
additional_perceived_objects
)。
·
mergedflag(合并标志):合并指示符——指示当前对象集群是否是由于合并一个或多个其他对象集群而创建的。
·
minoverlappedareaformerging(用于合并最小重叠区域):两个对象集群当可以被认为用于被合并时的最小重叠区域。
·
dynamicstatus(动力学状态):动态(例如,如果对象集群中至少一个对象正在移动);已经是动态的(例如,如果对象集群中至少有一个对象以前是动态的);静态(例如,如果对象集群中没有任何对象正在移动或过去是动态的)。
·
matchedposition(匹配位置)——车道id(例如,对象集群中心所在的一个车道id或对象集群区域占用的一个或多个车道id);纵向车道位置。i.c.4.关于感知对象集群的生成、传送和接收的行为
[0206]
在tx its-s处,如果触发了新的对象集群报告,则cps模块确定覆盖作为对象集群中的一个组报告的所有对象的对象集群区域。cps模块确保这些对象现在从各个感知对象容器中被排除。
[0207]
如果触发对现有对象集群的修改,则cps模块更新感知对象集群容器中包含的信息(参见例如,上文第i.c.3节)。当同一类别或相似类别的一个或多个新对象移动成更靠近于现有对象集群(例如,满足d
min_objectcluster
)和/或其他约束(例如,v
maxdiff_objectcluster
等)时,新感知对象将被包括在更新的对象集群中。cps模块确保这些对象现在从各个感知对象容器中被排除。收集更新的对象集群区域和其他信息。
[0208]
当现有对象集群中的一个或多个现有感知对象离开对象集群(例如,超过d
min_objectcluster
)和/或违反其他约束(例如,v
maxdiff_objectcluster
等)时,这些对象将从更新的对象集群中被排除。然后,cps模块考虑将这些对象包含在各个感知对象容器中。收集更新的对象集群区域和其他信息。排除这些对象后,如果现有对象集群覆盖的对象少于n
min_objectcluster
个对象,则感知对象集群容器将从cpm中被移除,并且此对象集群中的剩余对象将被视为包含在单独的感知对象容器中。
[0209]
在rx its-s处,如果在节点/邻居处接收到新的对象集群报告,则rx its-s的cps模块标识接收到的对象集群所覆盖的任何感知对象,并确保这些对象现在从各个感知对象容器中排除。如果在rx its-s处接收到现有对象集群中的修改,则该rx its-s的cps模块标识接收到的更新对象集群所覆盖的任何新感知对象,并确保这些对象现在从各个感知对象容器中被排除。rx its-s还标识接收到的更新对象集群中排除的任何先前覆盖的对象,并考虑这些对象将来包含在各个感知对象容器中。i.c.5.感知对象集群容器中感知对象的冗余缓解
[0210]
如前所述,如果its-s在cpm中报告特定对象类别/类型的对象集群,则其他相邻its-s停止报告位于报告对象集群区域内的同一类别对象。它减少了附近cpm的大小。
[0211]
如果its-s n2发现它有关于另一个its-s n1报告的对象集群oc1的更好信息,则n2在一些情况下可能开始报告oc1。n1然后停止报告oc1。例如,相比于由n1报告,n2可以以更高的置信度在所报告的oc1的对象集群区域中检测到更多对象。当n2比n1更能看到oc1的对象集群区域时,可能发生这种情况。在另一个示例中,n2有x个额外的感知对象,可以通过扩展对象集群区域将其包括在oc1中。n2感知到的所有这些新/附加对象都满足oc1中指定的约束(诸如n
min_objectcluster
、d
min_objectcluster
、v
maxdiff_objectcluster
)。在一些实施例中,x的值必须大于或等于n2接管报告更新的oc1的阈值(n
additional_perceived_objects
(诸如1、2等))。
[0212]
为了减少cpm生成/传送触发的数量,如果在现有对象集群区域中检测到一个或多个具有相同类别和相似速度/前进方向的新对象,则cpm生成触发将休息。在实施例中,如果新的此类感知对象的数量大于或等于阈值(n
minocmodify
,诸如1、2、3或某个其他数量),则仅触发cpm生成或对象集群修改,否则此类对象可包括在对象集群常规(诸如周期性)cpm更新中。i.c.5.合并对象集群
[0213]
在一些情况下,对象集群(例如,两个或多个在人行道上以相似速度和前进方向曲线移动的人的对象集群)可能非常接近(对象集群区域完全或部分重叠),这是因为,例如,这些对象集群在红灯期间面临不同的等待时间。在此类情况下,合并这些对象集群有助于减少cpm开销。在实施例中,两个或多个对象集群可以合并在一起。
[0214]
在第一实施例中,如果两个或多个对象集群oc1和oc2的重叠面积百分比大于或等于阈值(最小重叠区域合并(minoverlappedareaformerging))(例如,30%),并且oc1和oc2都由相同的its-s v1报告,则its-s v1将对象集群oc1和oc2合并为单个对象集群oc3。
[0215]
另外或可选地,oc3可能需要选择一组新的对象集群常量(例如,n
min_objectcluster
、d
min_objectcluster
、v
maxdiff_objectcluster
等),这些常量对对象集群oc1和oc2中的对象都有效。例如,选择oc1和oc2之间的n
min_objectcluster
的最小值作为oc3的新n
min_objectcluster
。相似地,oc1和oc2中d
min_objectcluster
和v
maxdiff_objectcluster
的最大值分别被选择为oc3的新d
min_objectcluster
和v
maxdiff_objectcluster
。
[0216]
在第二实施例中,如果两个或多个对象集群oc1和oc2的重叠区域百分比大于或等于阈值(最小重叠区域合并(minoverlappedareaformerging))(例如,40%),并且oc1和oc2由两个(或更多个)不同的its-s v1和v2报告,则v1或v2将对象集群oc1和oc2合并为单个对象集群oc3。
[0217]
各实施例可用于确定v1还是v2应合并并报告对象集群oc3。在一个实施例中,如果
oc1在其对象集群区域中具有更多数量的对象,则v1采取操作以合并oc1和oc2;否则v2将采取操作以合并oc1和oc2。在另一实施例中,如果oc1具有更大的对象集群区域,则v1采取操作以合并oc1和oc2;否则v2将采取操作合并oc1和oc2。
[0218]
oc3可能需要选择一组新的对象集群常量(诸如n
min_objectcluster
、d
min_objectcluster
、v
maxdiff_objectcluster
等),这些常量对对象集群oc1和oc2中的对象都有效。例如,选择oc1和oc2之间的n
min_objectcluster
的最小值作为oc3的新n
min_objectcluster
。相似地,oc1和oc2中d
min_objectcluster
和v
maxdiff_objectcluster
的最大值分别被选择为oc3的新d
min_objectcluster
和v
maxdiff_objectcluster
。
[0219]
在第一和第二实施例中,oc3可以使用oc1的对象集群id、oc2的对象集群id或新id。新id可以是新生成的对象集群id(例如,以与未合并集群相同的方式生成)、oc1和oc2的对象集群id的某种组合(例如,使用每个id的选定数量的msb,并将每个msb放置在新id的某个预定义部分(或位位置))、一个或多个对象集群id的散列等。指示(例如,mergedflag)可以添加到对象集群容器中,以让邻居知道关于合并。在其他实施例中,可以使用选择或生成新id的其他方法。i.c.6.cpm分段和对象集群包含优先级
[0220]
如果包括所有被选择用于传输的感知对象和对象集群候选的cpm的大小超过mtu_cpm,可发生消息分段,如本文中讨论的和/或[r01]和/或[r02]中讨论的。可以在不需要接收所有段的情况下解释每个消息段。当前,所选择的感知对象候选包含在cpm段中,按对象置信度(如果可用)和速度的乘积的降序排列。如果对象置信度不可用,则仅使用对象速度进行降序排序。
[0221]
对于对象集群,在当前cpm中按降序排列对象和对象集群的优先级值计算为对象集群的聚合置信度(如果可用)、对象集群的平均速度和对象集群的大小的乘积。如果对象集群的聚合置信度不可用,则应仅使用对象集群速度和大小的乘积以降序方式进行排序。将对象集群包含在更接近的最小cpm大小将提供更高的优先级。i.c.7.修改对象集群报告的现有感知对象容器
[0222]
感知数据类型感知对象集群容器的新容器用于将一组对象报告为对象集群。在一些实施例中,对现有的个体感知对象报告容器(感知对象容器)进行修改,使得感知对象容器也可以携载对象集群。
[0223]
图7示出了示例cpm 700修改,使得感知对象容器既可以携载关于个体感知对象的信息(例如,图7中的个体对象容器)又可以携载关于对象集群的信息(例如,图7中的对象集群容器)。
[0224]
在一个实施例中,在“感知对象”中添加objectreporttype(对象报告类型)字段添加,其指示感知对象是携载关于个体感知对象的信息还是关于对象集群(例如,一组对象)的信息。基于对象报告类型值在“感知对象”中添加其他元素。例如,如果对象报告类型指示个体感知对象,则现有cpm中“感知对象”的数据元素将被包括。如果对象报告类型指示对象集群,则数据元素(参见例如,第ac8648.9节)可以被包括。表4示出了根据这些实施例的示例cpm。表4:cpm中示例对象报告类型字段
[0225]
在另一个实施例中,“感知对象”容器的对象id的值(1到128)被划分到两个池中,诸如对象id池1(例如,1到n,其中1《n《=128)和对象id池2(n到128)。对象id池1中的对象id隐式表示个体感知对象报告,而对象id池2表示对象集群报告。基于对象id值,在“感知对象”中添加其余元素。例如,如果对象id指示个体感知对象,则现有cpm中“感知对象”的数据元素将被包括。如果对象id指示对象集群,则可以包括本文讨论的数据元素。i.c.8.包括对象集群的示例cpm实现方式
[0226]
表1-3提供了包括对象集群的cpm的示例实现方式。表1-3还提供了各种容器的内容以及数据字段(df)和数据元素(de)的描述。在这些实现方式中,de和/或df被包括在cpm管理信息容器中以启用增量cpm传送;用于cp分层成本地图的容器;用于共享来自各传感器的原始数据的容器;以及(多个)感知对象容器内的子容器,以包括相关联的传感器数据以及(多个)感知对象。根据各实施例的de和df的示例被示出为基于在中定义的消息格式的cpm的以下示例asn.1表示。
[0227]
根据各实施例的de和df的示例被示出为基于在[r05]中定义的消息格式的cpm的
以下示例asn.1表示。表5:cpm中示例对象报告类型字段
[0228]
集群对象实施例可以与本文讨论的任何其他实施例相结合,以进一步减少资源消耗和信令开销。ii.示例its站配置和布置
[0229]
图10示出了根据各实施例的示例站参考架构。在基于its的实现方式中,由图10描绘的组件中的一些或全部可遵循itsc协议,该itsc协议基于扩展用于its应用的分层通信协议的osi模型的原理。itsc尤其包括:接入层,与osi层1和层2相对应;联网和传输(n&t)层,与osi层3和层4相对应;设施层,与osi层5和层6以及osi层7的至少某种功能相对应;以及应用层,与osi层7中的一些或全部相对应。这些层中的每一者经由相应的接口、sap、api和/或其他类似的连接器或接口进行互连。
[0230]
应用层提供its服务,并且its应用在应用层中被定义。its应用是实现用于满足一个或多个its用例的逻辑的应用层实体。its应用利用由its-s提供的底层设施和通信能力。每个应用可以被分派至三个所标识的应用类中的一个应用类:道路安全、交通效率以及其他应用(参见例如,etsi en 302663版本1.3.1(2020年1月)(此后为“[r07]”),[r00])。its应用的示例可包括驾驶辅助应用(例如,用于协作认知和道路危险警告),包括aeb、ema和fcw应用、速度管理应用、绘图和/或导航应用(例如,逐向导航和协作导航)、提供基于位置的服务的应用、以及提供联网服务(例如,全球因特网服务和its-s生命周期管理服务)的应用。v-its-s向交通工具驾驶员和/或乘客提供its应用,并且可要求用于从机载网络或机载
系统访问机载数据的接口。出于部署和性能需要,v-its-s的特定实例可包含对应用和/或设施的分组。
[0231]
设施层包括中间件、软件连接器、软件粘合件等等,包括多种设施层。具体而言,设施层包含来自osi应用层的功能、来自osi呈现层的功能(例如,asn.1编码和解码、以及加密)以及来自osi会话层的功能(例如,主机间通信)。设施是向应用层中的应用提供功能、信息和/或服务并与较低层交换数据以用于就该数据与其他its-s进行通信的组件。由etsi ts 102 894-1版本1.1.1(2013年8月)(此后为“[r08]”)给出常见设施的列表。
[0232]
cp服务(cps)是etsi en 302 665版本1.1.1(2010年9月)中定义的its-s架构中的设施层实体。cps可与设施层的其他实体及its应用交互,以收集用于cpm生成并转发接收到的cpm内容的相关信息,以供进一步处理。图10描述了its-s架构中的cps以及设施层中其他层和实体的逻辑接口。
[0233]
集体感知(cp)是基于感知传感器共享its-s的感知环境的概念。与协作认知(ca)相比,its-s广播有关其当前(例如,驾驶)环境而不是有关其当前状态的信息。因此,cp是在不同的its-s之间借助v2x通信技术(或v2x rat)主动地交换当地感知到的对象的概念。cp通过向its-s的相互视场贡献信息而降低了its-s的环境不确定性。cpm使its-s能够共享有关周围环境中对象的信息,这些信息已被传感器、相机或其他信息源检测到,这些信息源安装在发射方its-s上或以其他方式可由发射方its-s访问。
[0234]
cps与ca基本服务[r09]有着根本的不同,因为它不侧重于传送有关传播方its-s的当前状态的数据,而是关于其感知环境的数据。为了避免通过多个its-s广播关于同一对象的cpm,cp服务可以过滤要包括在cpm中的检测到的对象(参见例如,[r01]第6.1条)
[0235]
不同类型的its-s(例如,v-its-s、r-its-s、个人its-s、vru-its-s等)的cps激活可能有所不同。只要cps处于活动状态,cpm生成就由cps实体/模块进行管理。对于v-its-s,cps随its-s激活而激活,并且当its-s停用时,cps终止。
[0236]
图10示出了特定于cps的功能,包括映射到its-s架构的接口。特定于cps的功能以位于设施层的cps基本服务为中心。cp基本服务是its-s设施层处的设施,可配置或操作以生成、接收并处理cpm。
[0237]
cp基本服务可操作cpm协议,该协议是用于操作cpm传送和接收的its设施层协议。根据本文讨论的各实施例,cpm是包括cpm数据和its pdu头部的cp基本服务pdu。cpm数据包括部分或完整的cpm有效载荷,并且可以包括如本文所讨论的各种数据容器和相关联的值/参数。cps基本服务消费设施层中其他服务的数据,并与其他应用支持设施链接。根据本文讨论的各实施例,cps基本服务负责cpm的传送。
[0238]
用于收集数据以生成cpm的实体可以是设备数据提供商(ddp)、位置和时间管理(poti)以及本地动态地图(ldm)。对于交通工具its-s,ddp与机载网络连接并且提供交通工具状态信息。poti实体提供its-s的位置和时间信息。
[0239]
cps实体通过if.cpm(cpm接口)接口与ldm和/或(多个)its应用交互(图10未示出;参见例如,图11)。为了提供接收到的数据,ca基本服务向ldm或its应用层()提供接口if.cam(cam接口)。ldm是its-s中的数据库,除了机载传感器数据外,还可以使用接收到的cam和cpm数据进行更新(参见例如,etsi tr 102 863版本1.1.1(2011年6月))。its应用可以检取来自ldm的信息以供进一步处理。cps还可以与服务公告(sa)服务交互,以指示its-s
生成cpm的能力。通过与动态拥塞控制和设施层准入控制模块(dcc-fac)实体交互来接收与当前信道利用率相关的消息传播特定的信息。dcc-fac向cps提供接入网络拥塞信息。到其他层的接口可以实现为一个或多个api,并且可以经由这些api在cp基本服务与其他层之间交换数据。在另一种可能的实现方式中,到其他层的接口可以实现为相应的sap。
[0240]
尽管未示出,但cps可与其他设施层功能(或简称“设施”)(诸如mcs等)交互,以协调去往/来自其他层的相应服务/数据。cps实体通过if.fac(设施接口)接口(未示出)与这些其他设施层实体进行通信。作为示例,其他设施/服务可包括合作认知基本服务(cabs)和/或协作认知基本服务(cabs)、信号相位和定时服务(spats)、易受伤害道路使用者基本服务(vrubs)、分散式环境通知(den)基本服务、操纵协调服务(mcs)等等。cps基本服务还可以与管理层中的cps简档管理实体交互,以实现与cps相关的目的。
[0241]
cps实体通过if.n&t(联网和运输接口)接口(未示出)与n&t层元件进行通信。cps通过网络-传输/设施(nf)-服务接入点(sap)与n&t交互,用于与其他its-s交换cpm。cps实体通过if.sec接口(未示出)与its安全实体进行通信。cps通过安全-设施(sf)-sap与安全实体进行交互,以访问cpm传送和cpm接收的安全服务。如果接收到的cpm数据直接提供给应用,则cps通过管理-设施(mf)-sap与管理实体交互,并通过设施-应用(fa)-sap与应用层交互。前述接口/sap中的每一者可利用设施层提供对数据的全双工交换,并且可实现合适的api来实现各种实体/元件之间的通信。
[0242]
在一些实施例中,本文讨论的实施例可在cps或其他类似设施层功能(或简称“设施”)中或通过cps或其他类似设施层功能实现,该功能向其他层提供cps相关的数据和/或控制cpm和/或其他类似消息的生成和发输。具体而言,cps模块/实体可驻留在设施层中或在设施层中操作、生成cpm,该cpm然后被传递到n&t层和接入层,以供传送到其他邻近its-s。在实施例中,cpm包含在its分组中(参见例如,图3-7),这些its分组是设施层pdu,可经由n&t层传递到接入层或传递到应用层以供一个或多个its应用消费。这样,cpm格式对底层接入层是不可知的并且cpm格式被设计成允许共享cpm,而不管底层接入技术/rat如何。
[0243]
对于交通工具its-s,设施层经由如[r08]中示出和描述的机载数据网关连接至机载网络。交通工具its-s的设施和应用从数据网关接收所要求的机载数据,以便构造消息(例如,csm、vam、cam、denm、mcm和/或cpm)并用于应用使用。对于发送和接收cam,ca-bs包括以下实体:编码cam实体、解码cam实体、cam传送管理实体、以及cam接收管理实体。对于发送和接收denm,den-bs包括以下实体:编码denm实体、解码denm实体、denm传送管理实体、denm接收管理实体、以及denm保持存活转发(kaf)实体。cam/denm传送管理实体实现始发its-s的协议操作,包括cam/denm传送操作的激活和终止、确定cam/denm生成频率、以及触发cam/denm的生成。cam/denm接收管理实体实现接收方its-s的协议操作,包括:在接收cam/denm时触发解码cam/denm实体,将接收到的cam/denm数据供应至接收方its-s的ldm、设施或应用,丢弃无效的cam/denm,以及检查接收到的cam/denm的信息。denm kaf实体kaf在其有效性持续时间期间存储接收到的denm,并在可适用时转发该denm;denm kaf的使用条件可由its应用要求来定义或由its管理实体的跨层功能来定义。编码cam/denm实体构造(编码)cam/denm以包括各种cam/denm,对象列表可包括如[r03]中定义的its数据字典中所要求的de和/或df的列表。
[0244]
its-s类型/能力设施提供用于描述要在应用和设施层中使用的its-s的简档的信
息。该简档指示its-s类型(例如,交通工具its-s、路边its-s、个人its-s或中央its-s)、its-s的角色以及检测能力和状态(例如,its-s的定位能力、感测能力等)。站类型/能力设施可存储各个连接的/耦合的传感器的传感器能力以及从此类传感器获得的传感器数据。
[0245]
位置和时间管理实体(poti)管理用于由its应用层、设施层、网络层、管理层和安全层使用的位置和时间信息。出于此种目的,poti从诸如gnss、传感器和its-s的其他子系统之类的子系统实体得到信息。poti确保its星座中的its-s之间的时间同步性,维护数据质量(例如,通过监视时间偏差),并且管理位置(例如,运动学和姿态状态)和时间的更新。its星座是在其自身之间交换its数据的its-s的群组。poti实体可包括用于改善位置和时间准确性、完整性和可靠性的增强服务。在这些方法之间,通信技术可用于提供从移动its-s到移动its-s以及从基础设施到移动its-s的定位辅助。考虑到位置和时间准确性方面的its应用要求,poti可使用增强服务来改善位置和时间准确性。可应用各种增强方法。poti可通过提供消息服务广播增强数据来支持这些增强服务。例如,路边its-s可向即将到来的交通工具its-s广播针对gnss的纠正信息;its-s可交换原始gps数据或者可交换陆地无线电位置和时间相关信息。poti根据its-s中的应用层、设施层以及其他层服务要求来维护和提供位置和时间参考信息。在its的上下文中,“位置”包括姿态和移动参数,包括速度、前进方向、水平速度等。its-s中所包含的刚性主体的运动学和姿态状态包括位置、速度、加速度、取向、角速度、以及可能的其他运动相关信息。特定时刻的位置信息被称为刚性主体的包括时间的运动学和姿态状态。除了运动学和姿态状态之外,poti还应当维护与运动学和姿态状态变量的置信度有关的信息。
[0246]
n&t层提供osi网络层和osi传输层的功能,并且包括一个或多个联网协议、一个或多个传输协议、以及网络和传输层管理。另外,传感器接口和通信接口的各方面可以是n&t和接入层的部分。联网协议可尤其包括ipv4、ipv6、具有移动性支持的ipv6联网、地理联网之上的ipv6、calm fast协议等等。传输协议可尤其包括bosh、btp、gre、地理联网协议、mptcp、mpudp、quic、rsvp、sctp、tcp、udp、vpn、一个或多个专用itsc传输协议、或某种其他合适的传输协议。这些联网协议中的每种联网协议可连接至对应的传输协议。接入层包括:物理层(phy),物理地连接至通信介质;数据链路层(dll),可被细分为管理对通信介质的访问的介质访问控制子层(mac)和逻辑链路控制子层(llc);管理适配实体(mae),用于直接管理phy和dll;以及安全性适配实体(sae),用于为接入层提供安全性服务。接入层还可包括外部通信接口(ci)和内部ci。ci是特定接入层技术或者(rat)和协议的实例化,该rat和协议诸如3gpp lte、3gpp 5g/nr、c-v2x(例如,基于3gpp lte和/或5g/nr)、wifi、w-v2x(例如,包括its-g5和/或dsrc)、以太网、蓝牙、和/或本文中所讨论的任何其他rat和/或通信协议。ci提供一个或多个逻辑信道(lch)的功能,其中,lch到物理信道的映射由所涉及的特定接入技术的标准来指定。
[0247]
另外,在同一级别下操作但不被包括在its-s中的其他实体包括:该级别下的相关用户、相关hmi(例如,音频设备、显示/触屏设备等);当its-s为交通工具时,用于自动化交通工具的交通工具运动控制(hmi和交通工具运动控制实体两者均可由its-s应用触发);收集和共享iot数据的本地设备传感器系统和iot平台;本地设备传感器融合和(多个)致动器应用,其可包含ai并对由传感器系统发出的数据流进行聚合;本地感知和轨迹预测应用,其消费融合应用的输出并馈送its-s应用;以及相关its-s。传感器系统可以包括v-its-s或
rse中的一个或多个相机、雷达、激光雷达等。在中央站中,传感器系统包括可位于道路一侧但将其数据直接报告给中央站而不涉及v-its-s或r-its-s的传感器。在一些情况下,传感器系统可附加地包括(多个)陀螺仪、(多个)加速度计等等(参见例如,图15的传感器电路系统1572)。
[0248]
图11示出了根据各实施例的示例cp基本服务功能架构1100。根据[r08],cp是设施层的应用支持域的一部分。图11示出了cps以及与其他设施和层的接口。对于发送和接收cpm,cps包括编码cpm子功能、解码cpm子功能、cpm传送管理子功能和cpm接收管理子功能。
[0249]
编码cpm子功能根据[r01]附录b中规定的格式以及本文讨论的各实施例构造cpm。cpm中包含最新的提取cp对象信息、传感器信息和自由空间信息数据。如本文所讨论的,cpm还可以包括分层成本地图容器和对象集群容器。解码cpm子功能对接收到的cpm进行解码。
[0250]
cpm传送管理子功能实现始发its-s的协议操作,诸如:cpm传送操作的激活和终止;cpm生成频率的确定;以及cpm生成的触发。cpm接收管理子功能实现接收方its-s的协议操作,诸如:在接收到传入cpm时触发cpm解码;将接收到的cpm提供给ldm或接收方its-s的its应用;以及检查接收到的cpm信息的有效性。
[0251]
图12示出了图11的cp基本服务1100的对象数据提取级别1200的示例。图12的(a)部分描述了一个实现方式,其中传感器数据作为低级别数据管理实体的一部分进行处理。然后,cp基本服务1100根据[r02]第4.3条中的定义选择要传送的对象候选。(a)部分更有可能避免滤波器级联,因为高级别融合任务将由接收方its-s执行。图12的(b)部分描述了cp基本服务根据[r02]第4.3条从高级别融合对象列表中选择要作为cpm一部分传送的对象的实现方式,从而提取融合过程中使用的原始传感器测量。cpm提供数据字段来指示对象的源。
[0252]
原始传感器数据是指安装在交通工具或rsu上或可由交通工具或rsu访问的本地感知传感器生成的低级别数据。该数据特定于传感器类型(例如,反射、飞行时间、点云、相机图像等)。在环境感知的情境下,通常对该数据进行分析,并进行传感器特定的分析过程,以从原始传感器数据检测并计算被检测对象的数学表示。ist-s传感器可提供原始传感器数据作为其测量的结果,该原始传感器数据随后由传感器特定的低级别对象融合系统(例如,传感器中枢、(多个)专用处理器等)使用,以提供通过传感器测量检测到的对象列表。检测机制和数据处理能力特定于每个传感器和/或硬件配置。
[0253]
这意味着对象的定义和数学表示可能有所不同。对象的数学表示称为状态空间表示。根据传感器类型,状态空间表示可包括多个尺寸(例如,特征到传感器的相对距离分量、特征速度、几何尺寸等)。为特定测量的每个检测对象生成状态空间。根据传感器类型,测量以循环性、周期性和/或基于某些定义的触发条件方式执行。在每次测量之后,在特定于测量的时间戳的对象列表中提供每个检测对象的计算状态空间。
[0254]
对象(数据)融合系统维护its-s当前感知的一个或多个对象列表。对象融合机制将每个对象预测为传感器无法测量的时间戳;将来自安装至站的其他潜在传感器的或从其他its-s接收的对象与跟踪列表中的对象关联;以及合并对象的预测和更新的测量。在每个时间点,数据融合机制能够基于(可能的)包含所有跟踪对象的状态空间的多个传感器的连续测量提供更新的对象列表。来自其他交通工具的v2x信息(例如,cam、denm、cpm等)可以附加地与本地感知信息进行融合。其他方法附加地提供经处理的传感器数据的替代表示,诸
如占用网格。
[0255]
数据融合机制还执行各种内务处理任务,诸如例如,在传感器检测到新对象的情况下,向its-s当前感知的对象列表添加状态空间;使用应与已跟踪对象关联的新测量更新数据融合系统已跟踪的对象;以及在新测量不应与已跟踪对象关联的情况下,从跟踪对象列表中移除对象。根据融合系统的能力,还可以对对象进行分类(例如,一些传感器系统能够将检测到的对象分类为特定道路使用者,而其他传感器系统仅能够对感知范围内的对象提供距离测量)。这些对象融合的任务可以由单独的传感器执行,也可以由高级别数据融合系统或过程执行。iii.示例边缘计算系统配置和布置
[0256]
图13图示出用于合并和使用本发明实施例的环境的概览。如所示,对于图示出的实施例而言,示例环境包括交通工具1352。交通工具1352包括引擎、变速器、轴、轮等等(未示出)。出于说明性目的,针对包括处于2d高速公路/公路/道路环境中的交通工具1352的部署场景提供以下描述,其中交通工具1352是汽车。然而,本文中所描述的实施例还可适用于其他类型的交通工具,诸如卡车、公共汽车、摩托艇、摩托车、电动客运工具和/或够运输人员或物品的任何其他机动化设备。此外,本文描述的实施例适用于不同交通工具类型的交通工具之间的社交网络。本文所描述的实施例也可适用于其中交通工具1352中的一些或全部被实现为飞行对象(诸如飞行器、无人机、uav)的情况,和/或可适用于任何其他类似的机动化设备。
[0257]
交通工具1352可以是用于运输人员或物品的任何类型的机动化交通工具,其中每一者装配有引擎、变速器、轴、轮以及用于驾驶、驻停、乘客舒适和/或安全等的控制系统等。本文使用的术语“电机”、“机动化”等是指将一种形式的能量转化为机械能的设备,并且包括内燃机、压缩内燃机(cce)、电动机和混合动力(例如,包括ice/cce和(多个)电动机)。如图13示出的多个交通工具1352可表示具有不同品牌、型号、装饰等的机动交通工具,并且可统称为“c/ad交通工具1352”等。
[0258]
每个交通工具1352中包括车载系统(ivs)1300、一个或多个传感器1310、以及一个或多个驾驶控制单元(dcu)1320。ivs 100包括数个交通工具计算硬件子系统和/或应用,包括例如,用于实现包括图11的cp基本服务1100的图10的its架构1000的各种硬件和软件元件。交通工具1352可采用一个或多个v2x无线电接入技术(rat),这允许交通工具1352直接彼此通信以及与基础设施装备(例如,nan 1356)通信。v2x rat可指3gpp蜂窝v2x rat(例如,lte、5g/nr及以后的)、基于ieee 802.11p等的wlan v2x(w-v2x)rat(例如,美国的dsrc或欧盟的its-g5)和/或某种其他rat(诸如本文中所讨论的那些)。交通工具1352中的一些或全部可包括用于(粗略地)确定其相应的地理位置并以安全且可靠的方式与rsu xe330传输其当前位置的定位电路系统。这允许交通工具1352彼此和/或与nan 1356同步。另外,交通工具1352中的一些或全部可以是计算机辅助或自主驾驶(c/ad)交通工具,其可包括用于辅助交通工具操作的人工智能(ai)和/或机器人。在该示例中,nan 1356可以是静止rsu,诸如gnb/enb型rsu或其他类似基础设施。在其他实施例中,nan 1356可以是可以由交通工具、行人或具有此类能力的某种其他设备来实现的移动rsu或ue型rsu。在这些情况下,可以管理移动性问题,以便确保对变换实体进行适当的无线电覆盖。
[0259]
子系统/应用还可包括仪表盘子系统、前排座位和/或后排座位信息娱乐子系统
和/或其他类似的媒体子系统、导航子系统(nav)1330、交通工具状态子系统/应用、hud子系统、ema子系统等等。nav 1330可以可被配置成用于或可以可操作用于取决于c/ad交通工具1352是计算机辅助交通工具、部分自主驾驶交通工具还是完全自主驾驶交通工具来提供导航引导或控制。nav 1330被配置有计算机视觉,该计算机视觉用于在c/ad交通工具1352行进到其目的地的途中时,识别c/ad交通工具1352周围的区域中的静止或移动对象(例如,行人、另一交通工具或某个其他移动对象)。nav 1330可以可被配置成用于或可以可操作用于识别c/ad交通工具1352周围区域中的静止或移动对象,并且作为响应,至少部分地基于由传感器1310收集的传感器数据,在引导或控制c/ad交通工具1352的dcu时做出其决策。
[0260]
dcu 1320包括控制c/ad交通工具1352的各种系统(诸如引擎、变速器、转向器、制动器等的操作)的硬件元件。dcu 1320是控制交通工具1352的对应系统的嵌入式系统或其他类似计算设备。dcu 1320可各自具有与下文讨论的图(错误!引用源未找到。错误!引用源未找到。)的设备/系统的组件相同或类似的组件,或者可以是某种其他合适的微控制器或其他类似的处理器设备、(多个)存储器设备、通信接口等等。各个dcu 1320能够与一个或多个传感器1310和致动器(例如,图15的致动器1574)通信。dcu 1320的示例尤其可包括传动系统控制单元、引擎控制单元(ecu)、引擎控制模块(ecm)、eems、动力系统控制模块(pcm)、变速箱控制模块(tcm)、包括防抱死制动系统(abs)模块和/或电子稳定控制(esc)系统的制动控制模块(bcm)、中央控制模块(ccm)、中央定时模块(ctm)、通用电子模块(gem)、车身控制模块(bcm)、悬架控制模块(scm)、门控制单元(dcu)、速度控制单元(scu)、人机界面(hmi)单元、远程信息处理控制单元(ttu)、电池管理系统、便携式排放测量系统(pems)、规避操纵辅助(ema)模块/系统和/或交通工具系统中的任何其他实体或节点。可由dcu 1320生成的csd的示例可包括但不限于,根据引擎控制模块(ecm)的实时计算出的引擎负载值,诸如交通工具的引擎的每分钟引擎转数(rpm)、引擎的一个或多个气缸和/或一个或多个喷射器的燃料喷射器激活定时数据、一个或多个气缸的点火火花定时数据(例如,相对于一个或多个气缸的曲柄角的火花事件的指示)、(可以由传输控制单元(tcu)提供给emc的)变速箱转动比数据和/或变速箱状态数据;等等。
[0261]
传感器1310是可被配置成用于或可操作用于检测交通工具1352周围的环境和/或该环境的改变的硬件元件。传感器1310可被配置成用于或可操作用于向dcu 1320和/或一个或多个ai代理提供各种传感器数据,以使得dcu 1320和/或一个或多个ai代理能够控制交通工具1352的相应的控制系统。传感器1310中的一些可与图15的传感器电路系统1572相同或类似。另外或替代地,传感器1310中的一些可以是用于各种交通工具控制系统的传感器,并且尤其可包括排气传感器,该排气传感器包括用于获得氧气数据的排气氧传感器和用于获得歧管压力数据的歧管绝对压力(map)传感器;质量空气流量(maf)传感器,用于获得进气流量数据;进气温度(iat)传感器,用于获得iat数据;环境空气温度(aat)传感器,用于获得aat数据;环境空气压力(aap)传感器,用于获得aap数据(例如,胎压数据);催化转化器传感器,包括用于获得催化转化器温度(cct)数据的cct传感器和用于获得催化转化器氧气(cco)数据的cco传感器;交通工具速度传感器(vss),用于获得vss数据;排气再循环(egr)传感器,包括用于获得erg压力数据的egr压力传感器和用于获得egr阀枢轴的位置/取向数据的egr位置传感器;节气门位置传感器(tps),用于获得节气门位置/取向/角度数据;曲柄/凸轮位置传感器,用于获得曲柄/凸轮位置/取向/角度数据;冷却液温度传感器;
传动系传感器,用于收集传动系传感器数据(例如,变速器液位)、交通工具主体传感器,用于收集交通工具主体数据(例如,与前格栅/挡泥板、侧门、后挡泥板、后尾箱等的屈曲相关联的数据)等等。传感器1310可包括其他传感器,诸如加速器踏板位置传感器(app)、加速度计、磁力计、水平传感器、流量/流体传感器、气压传感器等。来自主交通工具的传感器1310的传感器数据可包括由各种引擎传感器收集的引擎传感器数据(例如,引擎温度、油压等等)。
[0262]
dcu 1320可配备控制系统配置(csc),其是用于控制和/或监控由c/ad交通工具1352实施的各种系统的软件模块、软件组件、逻辑块、参数、校准、变体等的集合。csc定义dcu 1320如何使用多维性能图或查找表解释传感器1310的传感器数据和/或其他dcu 1320的csd,并定义如何基于传感器数据调节/修改致动器/组件。可以使用任何合适的面向对象编程语言(例如,c、c++、java等)、模式语言(例如,xml模式、汽车开放系统架构(autosar)xml模式等)、脚本语言(vbscript、javascript等)等开发由单个dcu 1320执行的csc和/或软件组件。可以使用硬件描述语言(hdl)来定义csc和软件组件,诸如寄存器传输逻辑(rtl)、超高速集成电路(vhsic)hdl(vhdl)、verilog等,用于实现为现场可编程设备(fpd)的dcu 1320。csc和软件组件可以使用建模环境或基于模型的开发工具生成。根据各实施例,csc可由一个或多个自主软件代理和/或ai代理基于学习到的经验、odd和/或其他类似参数生成或更新。在另一示例中,在一个或多个dcu 1320的实施例中。
[0263]
ivs 1300和/或dcu 1320可配置或可操作成用于基于一个或多个捕捉事件(如传感器1310捕捉的传感器数据所示)和/或从用户输入接收的指令或控制信号、通过空中从服务提供商接收的信号等来操作一个或多个致动器(例如,图15的致动器1574),等等。此外,一个或多个dcu 1320可配置成或可操作成用于通过基于检测到的事件(如传感器1310捕捉的传感器数据所示)向致动器传送/发送指令或控制信号来操作一个或多个致动器。一个或多个dcu 1320能够从一个或多个传感器1310读取或以其他方式获取传感器数据,处理传感器数据以生成控制系统数据(或csc),并将控制系统数据提供给一个或多个致动器以控制交通工具1352的各种系统。充当中央控制器或中枢的嵌入式设备/系统还可以访问控制系统数据,以便使用合适的驱动器、api、abi、库、中间件、固件和/或类似设备进行处理;和/或dcu 1320可配置或可操作成用于以在周期性或非周期性的基础上和/或在触发时向中央中枢和/或其他设备/组件提供控制系统数据。
[0264]
各种子系统(包括传感器1310和/或dcu 1320),可由一个或多个ai代理操作和/或控制。ai代理是可配置或可操作成用于观察环境条件并确定为实现特定目标而采取的行动的自主实体。要观察的特定环境条件和要采取的措施可基于操作设计领域(odd)。。odd包括给定ai代理或其特征专门设计成用于运行的操作条件。odd可包括操作限制,诸如环境、地理和时间限制,和/或某些交通或道路特征的必要存在或不存在。
[0265]
在实施例中,单个ai代理可配置或操作成用于控制主控交通工具的各个控制系统,其中一些可涉及使用一个或多个dcu 1320和/或一个或多个传感器1310。在这些实施例中,基于控制系统本身,要采取的动作和要实现的特定目标可以是特定的或个性化的。此外,一些动作或目标可以是动态驾驶任务(ddt)、对象和事件检测与响应(oedr)任务,或者其他非交通工具操作相关的任务,这取决于ai代理09实现的特定上下文。ddt包括在道路交通中操作1352交通工具所需的所有实时操作和战术功能,不包括战略功能(例如,行程安排
和目的地和航路点的选择)。ddt包括战术和操作任务,诸如经由转向控制横向交通工具运动(操作);经由加速和减速纵向交通工具运动控制(操作);经由对象和事件检测、识别、分类和响应准备(操作和战术)监控驾驶环境;对象和事件响应执行(操作和战术);操纵规划(战术);以及经由照明、信号和手势等增强醒目性(战术)。oedr任务可能是ddt的子任务,包括监控驾驶环境(例如,检测、识别和分类对象和事件,并根据需要准备响应)以及对此类对象和事件执行适当的响应,例如,根据需要完成ddt或回退任务。
[0266]
为了观察环境条件,ai代理可配置或操作成用于从一个或多个传感器1310接收或监控传感器数据,并从主交通工具1352的一个或多个dcu 1320接收控制系统数据(csd)。监控行为可包括从单个传感器1310和dcu 1320捕捉csd和/或传感器数据。监控可包括在指定/选定的时间段内轮询(例如,定期轮询、顺序(点名)轮询等)一个或多个传感器1310以获取传感器数据和/或一个或多个dcu 1320以获取csd。在其他实施例中,监视可包括响应于传感器数据/csd的外部请求而发送传感器数据/csd的请求或命令。在一些实施例中,监控可包括基于触发器或事件(诸如当主控交通工具在预定的时间量内达到预定的速度和/或距离时(有或没有间歇停车)),等待来自各传感器/模块的传感器数据/csd。事件/触发器可以是特定于ai代理的,并且可以根据特定实施例而变化。在一些实施例中,监控可由ivs 1300的应用或子系统或远程设备(诸如计算节点1357和/或(多个)服务器1360)触发或激活。
[0267]
在一些实施例中,ai代理中的一个或多个可配置或可操作成用于处理传感器数据和csd,以识别要采取行动的内部和/或外部环境条件。传感器数据的示例可包括但不限于,来自交通工具的一个或多个相机的图像数据,提供从交通工具向外看的正面、背面和/或侧面视图;来自交通工具的加速计、惯性测量单元(imu)和/或陀螺仪的传感器数据,提供主控交通工具的速度、加速度和倾斜数据;麦克风提供的音频数据;以及由一个或多个控制系统传感器提供的控制系统传感器数据。在示例中,ai代理中的一个或多个可配置或可操作成用于处理由传感器1310(图像捕捉设备)捕捉的图像和/或评估由某一其他子系统(例如,ema子系统、cas和/或cps实体等)识别的条件,以确定周围区域的状态或条件(例如,存在坑洼、倒下的树木/电线杆、路边护栏损坏、交通工具碎片等)。在另一示例中,ai代理中的一个或多个可配置或可操作成用于处理由一个或多个dcu 1320提供的csd,以确定主控交通工具的当前排放量或燃油经济性。ai代理还可配置或操作成用于将传感器数据和/或csd与训练集数据进行比较,以确定或有助于确定用于控制交通工具的相对应控制系统的环境条件。
[0268]
为了确定为实现特定目标而采取的行动,每个ai代理都可以配置或操作成用于标识ivs 1300、主控交通工具1352和/或ai代理自身的当前状态,标识或获取一个或多个模型(例如,ml模型),标识或获取目标信息,并基于当前状态/上下文、一个或多个模型和目标信息来预测采取一个或多个操作的结果。一个或多个模型可以是ai代理使用一个或多个训练数据集训练后创建的任何算法或对象,并且一个或多个模型可以指示基于当前状态可采取的可能行动。一个或多个模型可以基于为特定ai代理限定的odd。当前状态是主控交通工具1352的ivs 1300和/或一个或多个其他系统中的配置或信息集,或者是主控交通工具1352的ivs 1300和/或一个或多个其他系统中各条件的度量。当前状态存储在ai代理中,并保存在适当的数据结构中。ai代理可配置或操作成用于预测由于采取模型定义的某些行动而可
能产生的结果。目标信息描述了给定当前状态所需的预期结果(或目标状态)。ai代理中的每个可以从达到特定目标状态的预测可能结果中选择结果,并向交通工具1352的各种其他子系统提供信号或命令,以执行确定为导致所选结果的一个或多个动作。ai代理还可以包括可配置或可操作的学习模块,用于从关于所选结果和某一(某些)性能度量的经验中学习。体验可包括在执行所选结果的一个或多个动作之后收集的传感器数据和/或新状态数据。所学到的经验可用于生成新的或更新的模型,以确定未来要采取的行动。此外,每个c/ad交通工具1352配备有本公开的rss实施例。具体而言,ivs 1300可包括或实现设施层,并操作该设施层内的一个或多个rss实体。此外,每个c/ad交通工具1352配备有本公开的cs技术。具体地,ivs 1300可包括本公开的cs模块/(多个)cs基本服务功能。
[0269]
ivs系统1300单独或响应于用户交互,经由接口1353与一个或多个交通工具1352通信或交互,该接口1353可以是例如,lte/nr接近度服务(prose)链路或pc5接口/链路、或基于wifi的链路或基于个域网(pan)的链路(例如,基于ieee 802.15.4的协议,包括zigbee、低功率无线个域网上的ipv6(6lowpan)、wirelesshart、miwi、thread等;wifi-direct(wifi直连);蓝牙/蓝牙低能量(ble)协议)。在各实施例中,交通工具1352可以通过接口1353彼此交换示例实施例的cpm。
[0270]
ivs系统1300自身或响应于用户交互而通过接口1354或通过网络1358经由网络接入节点(nan)1356与一个或多个远程/云服务器1360通信或交互。nan 1356被布置成用于经由该nan 1356与各个交通工具1352之间相应的接口1354向交通工具1352提供网络连接性。在各实施例中,nan 1356是或包括its-s,并且可以是如先前讨论的r-its-s。
[0271]
实现连接1354的nan 1356可被称为“ran节点”等。ran节点1356可包括提供地理区域(例如,蜂窝小区)内的覆盖的地面站(例如,陆地接入点)或卫星站。ran节点1356可被实现为专用物理设备中的一个或多个,专用物理设备诸如宏蜂窝基站和/或低功率基站,该低功率基站用于提供毫微微蜂窝、微微蜂窝、或相较于宏蜂窝具有较小的覆盖面积、较小的用户容量、或较高的带宽的其他类似蜂窝。在该示例中,ran节点1356被具体化为节点b、演进型节点b(enb)、或下一代节点b(gnb)、一个或多个中继节点、分布式单元或路侧联合(rsu)。可以适用任何其他类型的nan。另外,ran节点1356可以实现用于ran的各种逻辑功能,包括但不限于用于无线电资源管理、准入控制、上行链路和下行链路动态资源分派、无线电承载方管理、数据分组调度等的(多个)ran功能(例如,无线电网络控制器(rnc)功能和/或ng-ran功能)。
[0272]
作为示例,网络1358和/或接入技术可包括诸如lte、multefire和/或nr/5g之类的蜂窝技术(例如,如由无线电接入网络(ran)节点1356提供)、wifi或无线局域网(wlan)技术(例如,如由接入点(ap)1356提供),等等。不同的技术在不同的场景中表现出益处和限制,并且不同场景中的应用性能变得取决于接入网络的选择(例如,wifi、lte等)以及所使用的网络和传输协议(例如,传输控制协议(tcp)、虚拟专用网络(vpn)、多路径tcp(mptcp)、通用路由封装(gre)等)。
[0273]
远程/云服务器1360可表示提供一个或多个云计算服务的云计算架构/平台。远程/云服务器1360可包括数个服务和能力1380中的任何一个,诸如例如,its相关应用和服务、驾驶辅助(例如,绘图/导航)、内容供应(例如,多媒体信息娱乐流送)等等。
[0274]
另外,nan 1356与可向交通工具1352提供任何数量的服务/能力1380的边缘计算
节点1357(或边缘计算节点1357的集合)共同定位,该服务/能力1380诸如its服务/应用、驾驶辅助和/或内容供应服务1380。边缘计算节点1357可包括或可以是边缘网络或“边缘云”的部分。边缘计算节点1357还可被称为“边缘主机1357”、“边缘服务器1357”或“计算平台1357”。边缘计算节点1357可对资源(例如,存储器、cpu、gpu、中断控制器、i/o控制器、存储器控制器、总线控制器、网络连接或会话等)进行分区,其中相应的分区可包含安全和/或完整性保护能力。缘节点还可通过隔离的用户空间实例(诸如容器、分区、虚拟环境(ve)、虚拟机(vm)、小型服务程序、服务器和/或其他类似的计算抽象)来提供多个应用程序的编排。
[0275]
边缘计算节点1357可被实现在以下各项中:数据中心或云安装;规定的边缘节点服务器、企业服务器、路边服务器、电信中央局;或正在消费边缘服务而被服务的本地或对等边缘处设备。此类其他边缘计算/联网技术的示例可实现边缘计算节点1357和/或边缘计算网络/云,包括:多接入边缘计算(mec)、内容交付网络(cdn)(也被称为“内容分发网络”,等等);移动性服务提供商(msp)边缘计算和/或移动性即服务(maas)提供商系统(例如,用于aecc架构);星云边缘-云系统;雾计算系统;微云边缘-云系统;移动云计算(mcc)系统;中央局重新架构为数据中心(cord)、移动cord(m-cord)和/或融合的多接入和核心(comac)系统;等等。进一步地,本文中所公开的技术可涉及其他iot边缘网络系统和配置,并且其他中间处理实体和架构也可适用于实践本文中的实施例。iv.计算系统和硬件配置
[0276]
图14和图15描绘了可实现本文中所讨论的计算节点或设备中的任一者的边缘计算系统和环境的示例。相应的边缘计算节点可以被具体化为能够与其他边缘组件、联网组件或端点组件进行通信的设备、装置、计算机或其他“物”的类型。例如,边缘计算设备可以被具体化为智能电话、移动计算设备、智能装置、机载计算系统(例如,导航系统)、或能够执行所描述的功能的其他设备或系统。
[0277]
图14描绘了示例边缘计算节点1400,其可被用作本文讨论的任何计算设备/系统(例如,移动设备、机载系统、基站、服务器、网关等)。在图14中,边缘计算节点1400包括计算引擎(本文中也称为“计算电路系统”)1402、输入/输出(i/o)子系统1408、数据存储1410、通信电路系统子系统1412,以及任选地,一个或多个外围设备1414。在其他示例中,相应的计算设备可以包括其他或附加组件,诸如通常在计算机中发现的那些组件(例如,显示器、外围设备等)。另外,在一些示例中,说明性组件中的一个或多个可被并入到另一组件中,或以其他方式形成另一组件的部分。
[0278]
计算节点1400可被具体化为能够执行各种计算功能的任何类型的引擎、设备、或设备集合。在一些示例中,计算节点1400可被具体化为单个设备,诸如集成电路、嵌入式系统、fpga、芯片上系统(soc)或者其他集成系统或设备。计算节点1400包括或被具体化为处理器1404和存储器1406。处理器1404可被具体化为能够执行本文中所描述的功能(例如,执行应用)的任何类型的处理器。例如,处理器1404可被具体化为(多个)多核处理器、微控制器、或其他处理器或处理/控制电路。在一些示例中,处理器1404可被具体化为、包括或耦合至fpga、专用集成电路(asic)、可重新配置的硬件或硬件电路系统、或用于促进本文中所描述的功能的执行的其他专用硬件。
[0279]
主存储器1406可被具体化为能够执行本文中所描述的功能的任何类型的易失性(例如,动态随机存取存储器(dram)等)或非易失性存储器或数据存储。易失性存储器可以
是需要功率来维持由该介质存储的数据的状态的存储介质。易失性存储器的非限制性示例可包括各种类型的随机存取存储器(ram),诸如dram或静态随机存取存储器(sram)。可以在存储器模块中使用的一种特定类型的dram是同步动态随机存取存储器(sdram)。
[0280]
在一个示例中,存储器设备是块可寻址存储器设备,诸如基于nand或nor技术的那些存储器设备。存储器设备还可包括三维交叉点存储器设备(例如,3d xpoint
tm
存储器)或其他字节可寻址的原位写入非易失性存储器设备。存储器设备可指代管芯本身和/或指代封装的存储器产品。在一些示例中,3d交叉点存储器(例如,3d xpoint
tm
存储器)可包括无晶体管的可堆叠的交叉点架构,其中存储单元位于字线和位线的交点处,并且可单独寻址,并且其中位存储基于体电阻的变化。在一些示例中,主存储器1406的全部或部分可被集成到处理器1404中。主存储器1406可存储在操作期间使用的各种软件和数据,诸如一个或多个应用、通过(多个)应用、库以及驱动程序操作的数据。
[0281]
计算电路系统1402经由i/o子系统1408通信地耦合至计算节点1400的其他组件,该i/o子系统1408可被具体化为用于促进与计算电路系统1402(例如,与处理器1404和/或主存储器1406)以及计算电路系统1402的其他组件的输入/输出操作的电路系统和/或组件。例如,i/o子系统1408可被具体化为或以其他方式包括存储器控制器中枢、输入/输出控制中枢、集成传感器中枢、固件设备、通信链路(即,点对点链路、总线链路、线路、电缆、光导、印刷电路板迹线等)和/或用于促进输入/输出操作的其他组件和子系统。在一些示例中,i/o子系统1408可以形成片上系统(soc)的部分,并可与计算电路系统1402的处理器1404、主存储器1406、和其他组件中的一个或多个一起被合并到计算电路系统1402中。
[0282]
一个或多个说明性数据存储设备1410可被具体化为被配置成用于数据的短期或长期存储的任何类型的设备,诸如例如,存储器设备和电路、存储器卡、硬盘驱动器、固态驱动器或其他数据存储设备。各个数据存储设备1410可包括存储用于数据存储设备1410的数据以及固件代码的系统分区。各个数据存储设备1410还可包括根据例如计算节点1400的类型来存储用于操作系统的数据文件和可执行文件的一个或多个操作系统分区。
[0283]
通信电路系统1412可被具体化为能够通过网络实现在计算电路系统1402与另一计算设备(例如,边缘网关节点等)之间的进行通信的任何通信电路、设备或其集合。通信电路系统1412可以被配置成使用任何一种或多种通信技术(例如,有线或无线通信)和相关联的协议(例如,蜂窝联网协议(诸如3gpp 4g或5g标准)、无线局域网协议(诸如ieee 802.11/)、无线广域网协议,以太网、蓝牙低能量、iot协议(诸如ieee 802.15.4或)、低功率广域网(lpwan)或低功率广域网(lpwa)协议等)来实行此类通信。
[0284]
说明性通信电路系统1412包括网络接口控制器(nic)1420,其也可被称为主机结构接口(hfi)。nic 1420可被具体化为一个或多个插入式板、子卡、网络接口卡、控制器芯片、芯片组或可由计算节点1400用来与另一计算设备连接的其他设备。在一些示例中,nic 1420可被具体化为包括一个或多个处理器的芯片上系统(soc)的部分,或nic 1420可被包括在也包含一个或多个处理器的多芯片封装上。在一些示例中,nic 1420可包括本地处理器(未示出)和/或本地存储器(未示出),这两者均位于nic 1420本地。在此类示例中,nic 1420的本地处理器可以能够执行本文中描述的计算电路系统1402的功能中的一个或多个功能。附加地或替代地,在此类示例中,nic 1420的本地存储器可以在板级、插座级、芯片级和/或其他层级上被集成到客户端计算节点的一个或多个组件中。
[0285]
另外,在一些示例中,相应的计算节点1400可以包括一个或多个外围设备1414。取决于计算节点1400的特定类型,此类外围设备1414可包括在计算设备或服务器中发现的任何类型的外围设备,诸如音频输入设备、显示器、其他输入/输出设备、接口设备和/或其他外围设备。在进一步的示例中,计算节点1400可以由边缘计算系统中的相应边缘计算节点(例如,客户端计算节点、边缘网关节点、边缘聚合节点、先前讨论的ue等)或类似形式的装置、计算机、子系统、电路系统、或其他组件来具体化。
[0286]
图15图示出可存在于边缘计算节点1550中的、用于实现本文中所描述的技术(例如,操作、过程、方法和方法论)的组件的示例。该边缘计算节点1550在被实现为计算设备(例如,移动设备、基站、服务器、网关等)或计算设备(例如,移动设备、基站、服务器、网关等)的一部分时提供节点1500的相应组件的更靠近的视图。边缘计算节点1550可包括本文中所引用的硬件或逻辑组件的任何组合,并且该边缘计算节点1550可包括可与边缘通信网络或此类网络的组合一起使用的任何设备或与该任何设备耦合。这些组件可被实现为ic、ic的部分、分立电子器件或其他模块、指令集、可编程逻辑或算法、硬件、硬件加速器、软件、固件、或其在边缘计算节点1550中适配的组合,或者被实现为以其他方式被并入在更大的系统的机架内的组件。
[0287]
边缘计算节点1550包括以一个或多个处理器1552形式的处理电路系统。处理器电路系统1552包括电路系统,诸如但不限于一个或多个处理器核以及以下各项中的一项或多项:高速缓存存储器、低压差电压调节器(ldo)、中断控制器、串行接口(诸如spi、i2c或通用可编程串行接口电路)、实时时钟(rtc)、定时器-计数器(包括间隔定时器和看门狗定时器)、通用i/o、存储器卡控制器(诸如安全数字/多媒体卡(sd/mmc)或类似物)、接口、移动产业处理器接口(mipi)接口、以及联合测试接入小组(jtag)测试接入端口。在一些实现方式中,处理器电路系统1552可包括一个或多个硬件加速器(例如,与加速电路系统1564相同或类似),该硬件加速器可以是微处理器、可编程处理设备(例如,fpga、asic)等等。一个或多个加速器可包括例如计算机视觉和/或深度学习加速器。在一些实现方式中,处理器电路系统1552可包括片上存储器电路系统,该片上存储器电路系统可包括任何合适的易失性和/或非易失性存储器,诸如dram、sram、eprom、eeprom、闪存存储器、固态存储器、和/或诸如本文中所讨论的那些存储器设备技术之类的任何其他类型的存储器设备技术。
[0288]
处理器电路系统1552可以包括,例如一个或多个处理器核(cpu)、应用处理器、gpu、risc处理器、acorn risc机器(arm)处理器、cisc处理器、一个或多个dsp、一个或多个fpga、一个或多个pld、一个或多个asic、一个或多个基带处理器、一个或多个射频集成电路(rfic)、一个或多个微处理器或控制器、多核处理器、多线程处理器、超低压处理器、嵌入式处理器、或任何其他已知的处理元件、或其任何合适的组合。处理器(或核)1552可与存储器/存储耦合或者可包括存储器/存储,并且可被配置成用于执行存储器/存储中所存储的指令以使得各种应用或操作系统能够在节点1550上运行。处理器(或核)1552被配置成用于操作应用软件以向节点1550的用户提供特定服务。在一些实施例中,(多个)处理器1552可以是(可)配置成用于根据本文中的各实施例进行操作的(多个)专用处理器/控制器。
[0289]
作为示例,(多个)处理器1552可包括可从加利福尼亚州圣克拉拉市的公司获得的基于架构酷睿
tm
(core
tm
)的处理器,诸如基于i3、i5、i7和i9的处理器;基
于微控制器的处理器,诸如夸克
tm
(quark
tm
)、凌动
tm
(atom
tm
)、或其他基于mcu的处理器;(多个)处理器、(多个)处理器、或另一此类处理器。然而,可使用任何数量的其他处理器,诸如以下各项中的一项或多项:超微半导体公司(amd)架构,诸如(多个)或处理器、加速处理单元(apu)、mxgpu、(多个)处理器等等;来自公司的(多个)a5-a12和/或s1-s4处理器,来自技术公司的(多个)骁龙
tm
(snapdragon
tm
)或centriq
tm
处理器,的(多个)开放多媒体应用平台(omap)
tm
处理器;来自mips技术公司的基于mips的设计,诸如mips勇士m类(warrior m-class)、勇士i类(warrior i-class)和勇士p类(p-class)处理器;许可自arm控股有限公司的基于arm的设计,诸如arm cortex-a、cortex-r和cortex-m族处理器;由cavium
tm
公司提供的等等。在一些实现方式中,(多个)处理器1552可以是片上系统(soc)、封装中系统(sip)、多芯片封装等等的部分,其中(多个)处理器1552和其他组件被形成到单个集成电路或单个封装中,诸如来自公司的爱迪生
tm
(edison
tm
)或伽利略
tm
(galileo
tm
)soc板。(多个)处理器1552的其他示例在本公开中的其他地方被提及。
[0290]
(多个)处理器1552可通过互连(ix)1556与系统存储器1554通信。可使用任何数量的存储器设备来提供给定量的系统存储器。作为示例,存储器可以是根据联合电子器件工程委员会(jedec)设计的随机存取存储器(ram),诸如ddr或移动ddr标准(例如,lpddr、lpddr2、lpddr3或lpddr4)。在特定示例中,存储器组件可符合jedec颁布的dram标准,诸如ddr sdram的jesd79f、ddr2 sdram的jesd79-2f、ddr3 sdram的jesd79-3f、ddr4 sdram的jesd79-4a、低功率ddr(lpddr)的jesd209、lpddr2的jesd209-2、lpddr3的jesd209-3和lpddr4的jesd209-4。还可包括其他类型的ram,诸如动态ram(dram)、同时dram(sdram)等等。此类标准(和类似的标准)可被称为基于ddr的标准,而存储设备的实现此类标准的通信接口可被称为基于ddr的接口。在各种实现方式中,单独的存储器设备可以是任何数量的不同封装类型,诸如单管芯封装(sdp)、双管芯封装(ddp)或四管芯封装(q17p)。在一些示例中,这些设备可以直接焊接到主板上,以提供薄型解决方案,而在其他示例中,设备被配置为一个或多个存储器模块,这一个或多个存储器模块进而通过给定的连接器耦合至主板。可使用任何数量的其他存储器实现方式,诸如其他类型的存储器模块,例如,不同种类的双列直插存储器模块(dimm),包括但不限于microdimm(微dimm)或minidimm(迷你dimm)。
[0291]
为了提供对信息(诸如数据、应用、操作系统等)的持久性存储,存储1558还可经由ix 1556而耦合至处理器1552。在示例中,存储1558可经由固态盘驱动器(ssdd)和/或高速电可擦除存储器(共同被称为“闪存”)来实现。可用于存储1558的其他设备包括闪存卡(诸如sd卡、microsd卡、xd图片卡,等等)和usb闪存驱动器。在示例中,存储器设备可以是或者可以包括使用硫属化物玻璃的存储器设备,多阈值级别nand闪存,nor闪存,单级或多级相变存储器(pcm),电阻式存储器,纳米线存储器,铁电晶体管随机存取存储器(fetram),反铁电存储器,包含忆阻器技术的磁阻随机存取存储器(mram),相变ram(pram),包括金属氧化物基底、氧空位基底和导电桥随机存取存储器(cb-ram)的电阻式存储器,或自旋转移力矩(stt)-mram,基于自旋电子磁结存储器的设备,基于磁隧穿结(mtj)的设备,基于畴壁(dw)和自旋轨道转移(sot)的设备、基于晶闸管的存储器设备、或者任何上述的组合或其他存储
器。存储器电路系统1554和/或存储电路系统1558还可包含和的三维(3d)交叉点(xpoint)存储器。
[0292]
在低功率实现方式中,存储1558可以是与处理器1552相关联的管芯上存储器或寄存器。然而,在一些示例中,存储1458可使用微硬盘驱动器(hdd)来实现。此外,附加于或替代于所描述的技术,可将任何数量的新技术用于存储1558,这些新技术诸如阻变存储器、相变存储器、全息存储器或化学存储器,等等。
[0293]
存储电路系统1558存储用于实现本文中描述的技术的软件、固件或硬件命令形式的计算逻辑1582(或“模块1582”)。可采用计算逻辑1582来存储计算机程序或用于创建计算机程序的数据的工作副本和/或永久副本,以用于节点1550的各组件(例如,驱动器等)、节点1550的操作系统、和/或一个或多个应用的操作,以用于执行本文中讨论的实施例。计算逻辑1582可作为指令1582或用于创建指令1588的数据被存储或被加载到存储器电路系统1554中,用于由处理器电路系统1552执行以提供本文中所描述的功能。各种元件可由受处理器电路系统1552支持的汇编器指令或可被编译成此类指令(例如,指令1588或用于创建指令1588的数据)来实现。编程指令的永久副本可在工厂中或在现场通过例如分发介质(未示出)、通过通信接口(例如,从分发服务器(未示出))、和/或空中下载(ota)被置于存储电路系统1558的持久性存储设备中。
[0294]
在示例中,经由图15的存储器电路系统1554和/或存储电路系统1558提供的指令1588被具体化为包括程序代码、计算机程序产品或用于创建计算机程序的数据一个或多个非暂态计算机可读存储介质(参见例如,ntcrsm 1560),其中计算机程序或数据用于指引节点1550的处理器电路系统1558在节点1550中执行电子操作和/或执行特定的动作序列或动作流,例如,如参考先前所描绘的操作和功能的(多个)流程图和(多个)框图所描述的。处理器电路系统1552通过互连1556来访问一个或多个非暂态计算机可读存储介质。
[0295]
在替代实施例中,可将编程指令(或用于创建指令的数据)设置在多个ntcrsm 1560上。在替代实施例中,可将编程指令(或用于创建指令的数据)设置在计算机可读暂态存储介质(诸如信号)上。可使用传输介质,经由网络接口设备,利用多种传输协议中的任何一种协议(例如,http),进一步通过通信网络来传送或接收由机器可读介质具体化的指令。可以利用一种或多种计算机可用或计算机可读介质的任何组合。该计算机可用或计算机可读介质例如可以是但不限于一个或多个电子、磁、光、电磁、红外或半导体系统、装置、设备或传播介质。例如,ntcrsm 1560可由针对存储电路系统1558和/或存储器电路系统1554所描述的设备来具体化。计算机可读介质的更具体的示例(非排他性列表)将包括下述项:具有一条或多条线的电连接件、便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存)、光纤、便携式压缩盘只读存储器(cd-rom)、光存储设备、和/或光盘、诸如支持互连网或内联网的传输介质之类的传输介质、磁存储设备、或任何数量的其他硬件设备。注意,计算机可用或计算机可读介质可甚至是其上打印有程序(或用于创建程序的数据)的纸张或另一合适的介质,因为程序(或用于创建程序的数据)可经由例如对纸张或其他介质的光学扫描而被电子地捕获,然后如有必要被编译、解释或以其他方式适当进行处理,然后被存储在计算机存储器中(暂存(stage)或不暂存在一个或多个中间存储介质中)。在本文档的上下文中,计算机可用或计算机可读介质可以是可以包含、存储、传达、传播、或传输程序(或用于创建程序的数据)以供指令执行系统、装置
或设备使用或结合指令执行系统、装置或设备一起使用的任何介质。计算机可用介质可包括传播的数据信号以及随其体现在基带中或作为载波的一部分的计算机可用程序代码(或用于创建程序代码的数据)。可使用任何适当的介质来传送计算机可用程序代码(或用于创建程序的数据),合适的介质包括但不限于无线、线缆、光纤电缆、rf等。
[0296]
在各实施例中,本文中所描述的程序代码(或用于创建程序代码的数据)能以压缩格式、加密格式、分段格式、封装格式等中的一种或多种格式来存储。本文中描述的程序代码(或用于创建程序代码的数据)可能要求安装、修改、适配、更新、组合、补充、配置、解密、解压缩、拆包、分发、重新分配等中的一项或多项,以使得它们可直接由计算设备和/或其他机器读取和/或执行。例如,程序代码(或用于创建程序代码的数据)可被存储在多个部分中,这些部分单独地被压缩、被加密并被存储在分开的计算设备上,其中,这些部分在被解密、被解压缩和被组合时形成实现诸如本文中所描述的程序代码(用于创建程序代码的数据)的一组可执行指令。在另一示例中,程序代码(或用于创建程序代码的数据)能以它们可被计算机读取的状态存储,但是要求添加库(例如,动态链接库)、软件开发工具包(sdk)、应用编程接口(api)等,以便在特定的计算设备或其他设备上执行指令。在另一示例中,在可整体地或部分地执行/使用程序代码(或用于创建程序代码的数据)之前,可能需要配置程序代码(或用于创建程序代码的数据)(例如,存储设置、输入数据、记录网络地址等)。在该示例中,程序代码(或用于创建程序代码的数据)可被拆包,被配置成用于恰当的执行,并且被存储在第一位置,其中配置指令位于区别于第一位置的第二位置。配置指令可由动作、触发器、或不与实现所公开的技术的指令共同位于存储或执行位置的指令发起。相应地,所公开的程序代码(或用于创建程序代码的数据)旨在包含此类机器可读指令和/或(多个)程序(或用于创建此类机器可读指令和/或程序的数据),而不管机器可读指令和/或(多个)程序在被存储或以其他方式处于静态或在运送中时的特定格式或状态如何。
[0297]
用于执行本公开的操作(例如,先前所讨论的计算逻辑1582、指令1582、指令1588)的计算机程序代码能以一种或多种编程语言的任何组合来编写,这些编程语言包括:面向对象的编程语言,诸如python、ruby、scala、smalltalk、java
tm
、c++、c#等等;过程编程语言,诸如,“c”编程语言、go(或“golang”)编程语言等等;脚本语言,诸如,javascript、服务器侧javascript(ssjs)、jquery、php、pearl、python、ruby on rails、加速移动页脚本(ampscript)、mustache模板语言、handlebars模板语言、guide模板语言(gtl)、php、java和/或java服务器页面(jsp)、node.js、asp.net、jamscript等等;标记语言,诸如,超文本标记语言(html)、可扩展标记语言(xml)、java脚本对象简谱(json)、层叠样式表(css)、java服务器页面(jsp)、messagepack
tm
、thrift、抽象语法标记一(asn.l)、协议缓冲(protobuf)等等;一些其他合适的编程语言,包括专有编程语言和/或开发工具或任何其他语言工具。用于执行本公开的操作的计算机程序代码还能以本文中所讨论的编程语言的任何组合来编写。程序代码可以整体地在系统1550上执行、部分地在系统1550上执行、作为独立的软件包执行、部分在系统1550上并且部分在远程计算机上执行或者整体地在远程计算机或服务器上执行。在后一场景中,可通过任何类型的网络(包括lan或wan)将远程计算机连接至系统1550,或可(例如,通过使用互联网服务提供商的互联网)进行到外部计算机的连接。
[0298]
在示例中,处理器电路系统1552上的指令1588(单独地,或与存储在计算机可读介质中的指令1582和/或逻辑/模块1582组合地)可配置受信任执行环境(tee)1590的执行或操作。tee 1590操作为可由处理器电路系统1552访问的受保护区域以实现对数据的安全访问以及指令的安全执行。在一些实施例中,tee 1590可以是与系统1550的其他组件分开的物理硬件设备,诸如安全嵌入式控制器、专用soc、或防篡改小芯片、或具有嵌入式处理设备和存储器设备的微控制器。此类实施例的示例包括符合台式和移动架构硬件(dash)的网络接口卡(nic);管理/可管理性引擎、聚合安全引擎(cse)或聚合安全管理/可管理性引擎(csme)、由提供的受信任执行引擎(txe),其中的每一个都可结合活跃管理技术(amt)和/或vpro
tm
技术来操作;平台安全协处理器(psp)、具有dash可管理型的高级a系列加速处理单元(apu)、安全飞地协处理器;crypto4807、4808、4809和/或4765密码协处理器、具有智能平台管理接口(ipmi)的基板管理控制器(bmc),戴尔
tm
远程辅助卡(drac ii)、集成式戴尔
tm
远程辅助卡(idrac),等等。
[0299]
在其他实施例中,tee 1590可实现为安全飞地,这些安全飞地是系统1550的处理器和/或存储器/存储电路系统内的代码和/或数据的隔离区域。仅在安全飞地内被执行的代码可访问同一安全飞地内的数据,并且该安全飞地仅可使用安全应用(其可由应用处理器或防篡改微控制器实现)访问。例如,可以通过使用软件防护扩展(sgx)或硬件安全扩展、由绿洲实验室
tm
提供的基石飞地来提供tee 1550的各种实现方式以及处理器电路系统1552或存储器电路系统1554和/或存储电路系统1558中伴随的安全区域。安全强化、硬件信任根、和受信任或受保护操作的其他方面可以通过tee 1590和处理器电路系统1552在设备1550中实现。
[0300]
在一些实施例中,存储器电路系统1554和/或存储电路系统1558可被划分为隔离的用户空间实例(诸如容器、分区、虚拟环境(ve)等)。隔离的用户空间实例可以使用合适的操作系统级虚拟化技术来实现,诸如容器、容器、容器和/或区域、虚拟私有服务器、dragonfly虚拟核和/或监狱(jail),chroot监狱和/或类似物。虚拟机器还可用于一些实现方式中。在一些实施例中,存储器电路系统1554和/或存储电路系统1558可被划分为一个或多个受信任存储器区域,用于存储tee1590的应用或软件模块。
[0301]
虽然指令1582被示出为存储器电路系统1554中所包括的代码块并且计算逻辑1582被示出为存储电路系统1558中的代码块,但应当理解,这些代码块中的任何代码块能以硬连线电路来代替,例如,被构建成fpga、asic或某个其他合适的电路系统。例如,在处理器电路系统1552包括(例如,基于fpga的)硬件加速器以及处理器核的情况下,硬件加速器(例如,fpga单元)可被预配置有前述的计算逻辑(例如,预配置有适当的位流)以执行先前所讨论的功能中的一些或全部(代替采用要由(多个)处理器核执行的编程指令)。
[0302]
存储器电路系统1554和/或存储电路系统1558可存储操作系统(os)的程序代码,该操作系统可以是通用os或为计算平台1550专门编写的并被定制成用于计算节点1550的os。例如,os可以是unix或类unix os(诸如例如,由红帽企业提供的linux)、由
提供的windows 10
tm
、由、由提供的macos,等等。在另一示例中,os可以是移动os,诸如,由诸如,由提供的由提供的由提供的提供的由kaios技术公司提供的kaios,等等。在另一示例中,os可以是实时os(rtos),诸如,由apache软件基金会提供的apache mynewt、由提供的windows 10for由公司提供的微控制器操作系统(“microc/os”或“μc/os”)、freertos、由提供的由sysgo提供的pikeos、由提供的android由黑莓公司提供的rtos、或任何其他合适的rtos,诸如,本文中所讨论的那些rtos。
[0303]
os可包括操作以控制特定设备的一个或多个驱动器,这些特定设备被嵌入在节点1550中、被附连至节点1550、或以其他方式与节点1550通信地耦合。驱动器可包括允许平台的其他组件与各种i/o设备交互或控制各种i/o设备的各个驱动器,这些i/o设备可存在于节点1550内或连接至节点1550。例如,驱动器可包括用于控制和允许对显示设备的访问的显示驱动器、用于控制和允许对节点1550的触摸屏接口的访问的触摸屏驱动器、用于获取传感器电路系统1572的传感器读数并且控制和允许对传感器电路系统1572的访问的传感器驱动器、用于获取致动器1574的致动器位置和/或控制和允许对致动器1574的访问的致动器驱动器、用于控制和允许对嵌入式图像捕捉设备的访问的相机驱动器、用于控制和允许对一个或多个音频设备的访问的音频驱动器。操作系统还可包括为一个或多个应用提供程序代码和/或软件组件以获得并使用来自安全执行环境(see)、受信任执行环境(tee)、和/或节点1550的管理引擎(未示出)的数据的一个或多个库、驱动器、api、固件、中间件、软件粘合件等。
[0304]
边缘计算设备1550的组件可通过ix1556进行通信。ix 1556可包括任何数量的技术,包括isa、扩展isa、i2c、spi、点对点接口、电源管理总线(pmbus)、pci、pcie、pcix、upi、加速器链路、加速器链路、cxl、capi、opencapi、qpi、upi、opa ix、rapidio
tm
系统ix、ccix、gen-z联合体ix、超级传输互连、提供的nvlink、时间触发协议(ttp)系统、flexray系统和/或任何数量的其他ix技术。ix 1556可以是例如在基于soc的系统中使用的专属总线。
[0305]
ix 1556将处理器1552耦合至通信电路系统1566以用于与其他设备的通信,该其他设备诸如远程服务器(未示出)和/或连接的边缘设备1562。通信电路系统1566是硬件元件或硬件元件的集合,用于通过一个或多个网络(例如,云1563)通信和/或与其他设备(例如,边缘设备1562)通信。
[0306]
收发机1566可使用任何数量的频率和协议,诸如ieee 802.15.4标准下的2.4千兆赫兹(ghz)传输,使用如由特别兴趣小组定义的低能量(ble)标准、或标准,等等。为特定的无线通信协议配置的任何数量的无线电可用于到连接的边缘设备1562的连接。例如,无线局域网(wlan)单元可用于根据电气和电子工程师协会(ieee)802.11标准实现通信。另外,例如根据蜂窝或其他无线广域协议的无线广域通信可经由无线广域网(wwan)单元发生。
[0307]
无线网络收发机1566(或多个收发机)可以使用用于不同范围的通信的多种标准或无线电来进行通信。例如,边缘计算节点1550可使用基于ble或另一低功率无线电的本地收发机与接近的(例如,在约10米内的)设备通信以节省功率。更远的(例如,在约50米内的)连接的边缘设备1562可通过或其他中间功率的无线电而联络到。这两种通信技术能以不同的功率水平通过单个无线电发生,或者可通过分开的收发机而发生,分开的收发机例如使用ble的本地收发机和分开的使用的网格收发机。
[0308]
可包括无线网络收发机1566(例如,无线电收发机),以经由局域网协议或广域网协议来与边缘云1563中的设备或服务通信。无线网络收发机1566可以是遵循ieee 802.15.4或ieee 802.15.4g标准等的lpwa收发机。边缘计算节点1563可使用由semtech和lora联盟开发的lorawan
tm
(长距离广域网)在广域上通信。本文中所描述的技术不限于这些技术,而是可与实现长距离、低带宽通信(诸如sigfox和其他技术)的任何数量的其他云收发机一起使用。进一步地,可使用其他通信技术,诸如在ieee 802.15.4e规范中描述的时分信道跳。
[0309]
除了针对如本文中所描述的无线网络收发机1566而提及的系统之外,还可使用任何数量的其他无线电通信和协议。例如,收发机1566可包括使用扩展频谱(spa/sas)通信以实现高速通信的蜂窝收发机。进一步地,可使用任何数量的其他协议,诸如用于中速通信和预设网络通信的网络。收发机1566可包括与任何数量的3gpp规范兼容的无线电,诸如lte和5g/nr通信系统,在本公开的末尾处更详细地进行讨论。网络接口控制器(nic)1568可被包括以提供到边缘云1563的节点或到其他设备(诸如(例如,在网格中操作的)连接的边缘设备1562)的有线通信。有线通信可提供以太网连接,或可基于其他类型的网络,诸如控制器区域网(can)、本地互连网(lin)、设备网络(devicenet)、控制网络(controlnet)、数据高速路加(dh+)、现场总线(profibus)或工业以太网(profinet),等等。附加的nic 1568可被包括以启用到第二网络的连接,例如,第一nic 1568通过以太网提供到云的通信,并且第二nic 1568通过另一类型的网络提供到其他设备的通信。
[0310]
鉴于从设备到另一组件或网络的可适用通信类型的多样性,由设备使用的可适用通信电路系统可以包括组件1564、1566、151468或1570中的任何一个或多个,或由组件1564、1566、151468或1570中的任何一个或多个来具体化。因此,在各示例中,用于通信(例如,接收、传送等)的可适用装置可由此类通信电路系统来具体化。
[0311]
边缘计算节点1550可以包括或被耦合到加速电路系统1564,该加速电路系统1564可以由一个或多个ai加速器、神经计算棒、神经形态硬件、fpga、gpu的布置、一个或多个soc(包括可编程soc)、一个或多个cpu、一个或多个数字信号处理器、专用asic(包括可编程asic)、诸如cpld或hcpld之类的pld和/或被设计用于完成一个或多个专业化任务的其他形式的专用处理器或电路系统来具体化。这些任务可以包括ai处理(包括机器学习、训练、推断、和分类操作)、视觉数据处理、网络数据处理、对象检测、规则分析等。在基于fpga的实现方式中,加速电路系统1564可包括逻辑块或逻辑结构以及其他互连的资源,这些逻辑块或逻辑结构以及其他互连的资源可被编程(被配置)为用于执行本文中所讨论的各实施例的各种功能,诸如过程、方法、功能等。在此类实现方式中,加速电路系统1564还可包括用于将逻辑块、逻辑结构、数据等存储在lut等等中的存储器单元(例如,eprom、eeprom、闪存、静态存储器(例如,sram、反熔丝等))。
[0312]
ix 1556还将处理器1552耦合至用于连接附加的设备或子系统的传感器中枢或外部接口1570。附加/外部设备可包括传感器1572、致动器1574、以及定位电路系统1545。
[0313]
传感器电路系统1572包括其目的为检测其环境中的事件或其环境的改变并将关于检测到的事件的信息(传感器数据)发送到其他设备、模块、子系统等的设备、模块或子系统。此类传感器1572的示例尤其包括:惯性测量单元(imu),包括加速度计、陀螺仪、和/或磁力计;微机电系统(mems)或纳机电系统(nems),包括3轴加速度计、3轴陀螺仪和/或磁力计;液位传感器;流量传感器;温度传感器(例如,热敏电阻);压力传感器;气压传感器;重力仪;高度计;图像捕捉设备(例如,相机);光检测和测距(lidar)传感器;接近度传感器(例如,红外辐射检测器等等)、深度传感器、环境光传感器;光学光传感器;超声波收发机;话筒;等等。
[0314]
致动器1574允许平台1550改变其状态、位置和/或取向,或者移动或控制机制或系统。致动器1574包括用于移动或控制机制或系统的电设备和/或机械设备,并且将能量(例如,电流或移动的空气和/或液体)转换为某个种类的运动。致动器1574可包括一个或多个电子(或电化学)设备,诸如压电生物形态、固态致动器、固态继电器(ssr)、基于形状记忆合金的致动器、基于电活性聚合物的致动器、继电器驱动器集成电路(ic),等等。致动器1574可包括一个或多个机电设备,诸如气动致动器、液压致动器、机电开关(包括机电继电器(emr))、电动机(例如,dc电动机、步进电动机、伺服机构等)、功率开关、阀致动器、轮、推进器、螺旋桨、爪、夹具、挂钩、可听语音生成器、视觉警示设备、和/或其他类似的机电组件。平台1550可被配置成用于基于一个或多个捕捉到的事件和/或从服务提供商和/或各种客户端系统接收到的指令或控制信号来操作一个或多个致动器1574。
[0315]
定位电路系统1545包括用于接收由全球导航卫星系统(gnss)的定位网络传送/广播的信号并对其进行解码。导航卫星星座(或gnss)的示例包括美国的全球定位系统(gps)、俄罗斯的全球导航系统(glonass)、欧盟的伽利略系统、中国的北斗导航卫星系统、区域导航系统或gnss增强系统(例如,利用印度星座(navic)、日本的准天顶卫星系统(qzss)、法国的多普勒轨道成像和卫星综合无线电定位(doris)等进行的导航)等等。定位电路系统1545包括用于与定位网络(诸如导航卫星星座节点)的组件通信的各种硬件元件(例如,包括诸如交换机、滤波器、放大器、天线元件等等之类的用于促进ota通信的硬件设备)。在一些实施例中,定位电路系统1545可包括用于定位、导航和定时的微技术(micro-pnt)ic,其使用主定时时钟来执行位置跟踪/估计而无需gnss辅助。定位电路系统1545也可以是通信电路系统1566的部分或者与通信电路系统1566交互以与定位网络的节点和组件通信。定位电路系统1545还可向应用电路系统提供位置数据和/或时间数据,该应用电路系统可使用该数据使操作与各种基础设施装备(例如,无线电基站)同步以用于逐向道路导航等等。当gnss信号不可用或当gnss定位精度对于特定应用或服务不足够时,可使用定位增强技术来向应用或服务提供增强的定位信息和数据。此类定位增强技术可以包括例如基于卫星的定位增强(例如,egnos)和/或基于地面的定位增强(例如,dgps)。在一些实现方式中,定位电路系统1545是或包括ins,该ins是使用传感器电路系统1572(例如,诸如加速度计之类的运动传感器、诸如陀螺仪之类的旋转传感器、以及高度计、磁传感器和/或类似物)来连续计算(例如,使用航位推算、三角测量等)节点1550的定位、定向和/或速度(包括移动的方向和速度)而无需外部参考的系统或设备。
[0316]
在一些示例中,各种输入/输出(i/o)设备可存在于边缘计算节点1550内或连接至边缘计算节点1550,i/o设备是指图15中的输入电路系统1586和输出电路系统1584。输入电路系统151486和输出电路系统1584包括被设计成用于实现用户与节点1550的交互的一个或多个用户接口以及被设计成用于实现外围组件与节点1550的交互的外围组件接口。输入电路系统1586可包括用于接受输入的任何实体或虚拟装置,输入电路系统1586尤其包括一个或多个实体或虚拟按钮(例如,重置按钮)、物理键盘、小键盘、鼠标、触摸板、触摸屏、话筒、扫描仪、头戴式耳机,等等。可包括输出电路系统1584,以示出信息或以其他方式传达信息,诸如传感器读数、(多个)致动器位置、或其他类似信息。可将数据和/或图形显示在输出电路系统1584的一个或多个用户接口组件上。输出电路系统1584可包括任何数量的音频或视觉显示器和/或音频或视觉显示器的任何组合,尤其包括具有从节点1550的操作生成或产生的字符、图形、多媒体对象等的输出的一个或多个简单的视觉输出/指示器(例如,二进制状态指示器(例如,发光二极管(led))和多字符视觉输出/或更复杂的输出,诸如显示设备或触摸屏(例如,液晶显示器(lcd)、led显示器、量子点显示器、投影仪等)。输出电路系统1584还可包括扬声器或其他发声设备、(多个)打印机等等。在一些实施例中,传感器电路系统1572可被用作输入电路系统1584(例如,图像捕捉设备、运动捕捉设备等等),并且一个或多个致动器1574可被用作输出电路系统1584(例如,用于提供触觉反馈等的致动器)。在另一示例中,近场通信(nfc)电路系统可被包括以读取电子标签和/或与另一启用nfc的设备通信,该nfc电路系统包括与天线元件耦合的nfc控制器并且包括处理设备。外围组件接口可包括但不限于非易失性存储器端口、usb端口、音频插孔、电源接口等。在本系统的上下文中,显示器或控制台硬件可用于:提供边缘计算系统的输出并接收边缘计算系统的输入;管理边缘计算系统的组件或服务;标识边缘计算组件或服务的状态;或进行任何其他数量的管理或管理功能或服务用例。
[0317]
电池1576可为边缘计算节点1550供电,但是在其中边缘计算节点1550被安装在固定位置的示例中,该边缘计算节点1550可具有耦合至电网的电源,或者电池可以用作备用或用于临时功能。电池1576可以是锂离子电池、金属-空气电池(诸如锌-空气电池、铝-空气电池、锂-空气电池),等等。
[0318]
电池监测器/充电器1578可被包括在边缘计算节点1550中以跟踪电池1576(如果包括的话)的充电状态(soch)。电池监测器/充电器1578可用于监视电池1576的其他参数以提供失效预测,诸如电池1576的健康状态(soh)和功能状态(sof)。电池监测器/充电器1578可包括电池监测集成电路,诸如来自线性技术公司(linear technologies)的ltc4020或ltc2990、来自亚利桑那州的凤凰城的安森美半导体公司(on semiconductor)的adt7488a、或来自德克萨斯州达拉斯的德州仪器公司的ucd90xxx族的ic。电池监测器/充电器1578可通过ix 1556将关于电池1576的信息传输至处理器1552。电池监测器/充电器1578也可包括使处理器1552能够直接监视电池1576的电压或来自电池1576的电流的模数(adc)转换器。电池参数可被用于确定边缘计算节点1550可执行的动作,诸如传输频率、网格网络操作、感测频率,等等。
[0319]
功率块1580或耦合至电网的其他电源可与电池监测器/充电器1578耦合以对电池1576充电。在一些示例中,功率块1580可用无线功率接收机代替,以便例如通过边缘计算节点1550中的环形天线来无线地获得功率。无线电池充电电路(诸如来自加利福尼亚州的苗
比达市的线性技术公司的ltc4020芯片,等等)可被包括在电池监测器/充电器1578中。可以基于电池1576的尺寸并且因此基于所要求的电流来选择特定的充电电路。可使用由无线充电联盟(airfuel alliance)颁布的airfuel标准、由无线电力协会(wireless power consortium)颁布的qi无线充电标准、或由无线电力联盟(alliance for wireless power)颁布的rezence充电标准等等来执行充电。
[0320]
存储1558可包括用于实现本文中公开的技术的软件、固件或硬件命令形式的指令1582。虽然此类指令1582被示出为被包括在存储器1554和存储1558中的代码块,但是可以理解,可用例如被建立到专用集成电路(asic)中的硬连线电路来代替代码块中的任一个。
[0321]
在示例中,经由存储器1554、存储1558或处理器1552提供的指令1482可被具体化为非暂态机器可读介质1560,该非暂态机器可读介质1560包括用于指导处理器1552执行边缘计算节点1250中的电子操作的代码。处理器1552可通过ix 1556来访问非暂态机器可读介质1560。例如,非暂态机器可读介质1560可由针对存储1558所描述的设备来具体化,或者可包括特定的存储单元,诸如光盘、闪存驱动器或任何数量的其他硬件设备。非暂态机器可读介质1560可包括用于指示处理器1552执行例如像参照上文中描绘的操作和功能的(多个)流程图和(多个)框图而描述的特定的动作序列或动作流的指令。如本文中所使用,术语“机器可读介质”和“计算机可读介质”是可互换的。
[0322]
在进一步的示例中,机器可读介质也包括任何有形介质,该有形介质能够存储、编码或携带供由机器执行并且使机器执行本公开方法中的任何一种或多种方法的指令,或者该有形介质能够储存、编码或携带由此类指令利用或与此类指令相关联的数据结构。“机器可读介质”因此可包括但不限于固态存储器、光学介质和磁介质。机器可读介质的特定示例包括非易失性存储器,作为示例,包括但不限于:半导体存储器设备(例如,电可编程只读存储器(eprom)、电可擦除可编程只读存储器(eeprom)和闪存设备);诸如内部硬盘及可移除盘之类的磁盘;磁光盘;以及cd-rom和dvd-rom盘。可使用传输介质,经由网络接口设备,利用多种传输协议中的任何一种协议(例如,http),进一步通过通信网络来传送或接收由机器可读介质具体化的指令。
[0323]
机器可读介质可以由能够以非暂态格式主控数据的存储设备或其他装置提供。在示例中,存储在机器可读介质上或以其他方式提供在机器可读介质上的信息可以表示指令,诸如指令本身或者可以从中导出指令的格式。可以从中导出指令的该格式可以包括源代码、经编码的指令(例如,以压缩或加密的形式)、经封装的指令(例如,分成多个封装)等。表示机器可读介质中的指令的信息可以由处理电路系统处理成指令以实现本文所讨论的任何操作。例如,从信息中导出指令(例如,由处理电路进行的处理)可以包括:(例如,从源代码、目标代码等)编译、解释、加载、组织(例如,动态地或静态地进行链接)、编码、解码、加密、解密、打包、拆包,或者以其他方式将信息操纵到指令中。
[0324]
在示例中,指令的推导可以包括(例如,通过处理电路系统)对信息进行汇编、编译、或解释,以从机器可读介质提供的某个中间或预处理的格式创建指令。当信息以多个部分提供时,可以对其进行组合、拆包和修改以创建指令。例如,信息可以处于一个或若干远程服务器上的多个经压缩的源代码封装(或目标代码、或二进制可执行代码等)中。源代码封装可以在通过网络传输时被加密,并且可以在本地机器处被解密、被解压缩、(如果必要的话)被汇编(例如,被链接),并且被编译或被解释(例如被编译或被解释成库、独立的可执
行文件等),并且由本地机器执行。
[0325]
图14和图15的图示旨在描绘边缘计算节点的各种设备、子系统、或布置的组件的高级视图。然而,可省略所示出的组件中的一些组件,可存在附加的组件,并且组件的不同布置可在其他实现方式中发生。此外,这些布置可用于各种用例和环境中,这些用例和环境包括本文中所讨论的那些用例和环境(例如,用于智慧城市或智慧工厂的工业计算中的移动ue,以及许多其他示例)。图14和图15的相应计算平台可通过使用在单个计算平台上运行的租户容器来支持多个边缘实例(例如,边缘集群)。同样,多个边缘节点可作为在同一计算平台内的租户上运行的子节点而存在。相对应地,基于可用的资源分区,可将单个系统或计算平台分区或划分为支持多个租户和边缘节点实例,该多个租户和边缘节点实例中的每一者可支持多个服务和功能——即使在潜在地在多个计算平台实例中由多个所有者操作或控制时也是如此。这些各种类型的分区可通过使用lsm或使用隔离/安全性策略的其他实现方式来支持复杂的多租户、以及多利益相关方的许多组合。由此在以下章节中记述对使用lsm、以及增强或实现此类安全性特征的安全性特征的引用。同样,在这些各种类型的多实体分区上操作的服务和功能可以是负荷平衡的、经迁移的、以及经编排的,以实现必要的服务目标和操作。v.示例实现方式
[0326]
当前所描述的方法、系统和设备实施例的附加示例包括下列非限制性实现方式。下列非限制性示例中的每一个示例可以独立存在,或可以与以下所提供的或遍及本公开的其他示例中的任何一个或多个示例按照任何排列或组合进行结合。
[0327]
示例1包括一种操作智能运输系统站(its-s)以提供集体感知服务(cps)的方法,该方法包括:由its-s中的cps元件生成包括分层成本地图(lcm)容器的集体感知消息(cpm),该lcm容器是包括lcm数据的数据结构,该lcm数据指示分层成本地图中相对应单元的成本值,该成本值是在相对应单元中存在感知对象的概率;以及由cps元件将cpm传送或广播到距its-s在预定义距离内的一个或多个邻近its-s。
[0328]
示例2包括示例1和/或本文中的某个(些)其他示例的方法,其中,生成cpm包括:向lcm容器中插入lcm的一个或多个层。
[0329]
示例3包括示例2和/或本文中的某个(些)其他示例的方法,其中,lcm的一个或多个层包括静态成本地图层、感知障碍物成本地图层、膨胀成本地图层、集体感知层。
[0330]
示例4包括示例3和/或本文中的某个(些)其他示例的方法,进一步包括生成lcm,并且生成lcm包括:在lcm的每一层跟踪与相应功能或相应传感器类型相关的数据;以及将来自静态成本地图层、感知障碍物成本地图层、膨胀成本地图层和集体感知层的跟踪数据累积到主成本地图层中,该主成本地图层是一个或多个层中的层。
[0331]
示例5包括示例4和/或本文中的某个(些)其他示例的方法,其中,在静态成本地图层跟踪数据包括:针对表示非移动结构的一个或多个感知对象,生成或更新具有成本值的占用网格。
[0332]
示例6包括示例4-5和/或本文中的某个(些)其他示例的方法,其中,在感知障碍物成本地图层跟踪数据包括:针对表示移动对象和非移动对象的一个或多个感知对象,生成或更新具有成本值的占用网格。
[0333]
示例7包括示例4-6和/或本文中的某个(些)其他示例的方法,其中,在膨胀成本地
图层跟踪数据包括:针对一个或多个感知对象周围的缓冲区,生成或更新具有成本值的占用网格。
[0334]
示例8包括示例4-7和/或本文中的某个(些)其他示例的方法,其中,在集体感知层跟踪数据包括:生成或更新具有从一个或多个邻近its-s接收的成本值的占用网格。
[0335]
示例9包括示例8和/或本文中的某个(些)其他示例的方法,其中,一个或多个层进一步包括差异处理成本地图层,并且在差异处理成本地图层跟踪数据包括:标识lcm的一个或多个层的占用网格中的成本值与从一个或多个邻近its-s接收的相对应成本值之间的差异。
[0336]
示例10包括示例9和/或本文中的某个(些)其他示例的方法,进一步包括:当预定数量的成本地图值的所标识的差异等于或高于阈值差异值时,向lcm容器中插入差异处理成本地图层。
[0337]
示例11包括示例10和/或本文中的某个(些)其他示例的方法,其中,差异的解决基于its-s与一个或多个邻近its-s之间的多数投票。
[0338]
示例12包括示例9-11和/或本文中的某个(些)其他示例的方法,其中,一个或多个层进一步包括协作请求成本地图层,并且在协作请求成本地图层跟踪数据包括:生成或更新具有一个或多个感知对象中的每一个感知对象的置信度水平的占用网格。
[0339]
示例13包括示例12和/或本文中的某个(些)其他示例的方法,进一步包括:当占用网格中预定数量的单元的置信度水平低于阈值置信度水平时,向lcm容器中插入协作请求成本地图层。
[0340]
示例14包括示例4-13和/或本文中的某个(些)其他示例的方法,进一步包括:检测自先前cpm生成事件以来、导致感知障碍物成本地图层和主成本地图层变化的一个或多个对象;以及在lcm容器中仅插入主成本地图层。
[0341]
示例15包括示例4-14和/或本文中的某个(些)其他示例的方法,进一步包括:检测自先前cpm生成事件以来、导致感知障碍物成本地图层和主成本地图层变化的一个或多个对象;以及在lcm容器中插入感知障碍物成本地图层和主成本地图层。
[0342]
示例16包括示例4-15和/或本文中的某个(些)其他示例的方法,进一步包括:检测自的先前cpm生成事件以来、在检测到的一个或多个对象周围需要缓冲区并导致膨胀成本地图层和主成本地图层变化的一个或多个对象;以及在lcm容器中插入膨胀成本地图层和主成本地图层。
[0343]
示例17包括示例4-16和/或本文中的某个(些)其他示例的方法,进一步包括:在感知障碍物成本地图层定时器到期时在lcm容器中插入感知障碍物成本地图层,感知障碍物成本地图层定时器在感知障碍物成本地图层被插入到先前cpm中时启动。
[0344]
示例18包括示例17和/或本文中的某个(些)其他示例的方法,进一步包括:在膨胀成本地图层定时器到期时在lcm容器中插入膨胀成本地图层,膨胀成本地图层定时器在膨胀成本地图层被插入到先前cpm中时启动。
[0345]
示例19包括示例18和/或本文中的某个(些)其他示例的方法,其中,插入感知障碍物成本地图层和膨胀成本地图层包括:在lcm容器中直接插入感知障碍物成本地图层或膨胀成本地图层;或者,经由更新主成本地图层而在lcm容器中间接插入感知障碍物成本地图层或膨胀成本地图层。
[0346]
示例20包括示例4-19和/或本文中的某个(些)其他示例的方法,其中,生成lcm进一步包括:为每个层生成相应成本地图,相应成本地图包括具有与至少一个传感器的视场(fov)相对应的尺寸的形状;以及将相应成本地图划分为多个单元。
[0347]
示例21包括示例1-20和/或本文中的某个(些)其他示例的方法,其中,生成cpm进一步包括:生成cpm以包括区域数据字段(df)作为lcm容器的一部分,并且多个单元的每个单元的尺寸包括在相应网格大小数据元素(de)中。
[0348]
示例22包括示例21和/或本文中的某个(些)其他示例的方法,其中,在lcm容器中插入一个或多个层包括:将每个层的每个单元的成本值插入lcm容器的成本地图网格值df的相应de。
[0349]
示例23包括示例1-22和/或本文中的某个(些)其他示例的方法,其中,生成cpm包括:当当前成本地图网格区域与先前成本地图网格区域之间的差超过阈值距离时,生成cpm以包括lcm容器。
[0350]
示例24包括示例23和/或本文中的某个(些)其他示例的方法,其中,当前成本地图网格区域与先前成本地图网格区域之间的差基于:当前成本地图网格区域的当前节点中心点与先前生成的cpm中报告的先前成本地图网格区域的节点中心点之间的距离;当前成本地图网格区域的当前半范围长度与先前生成的cpm中报告的先前成本地图网格区域的先前半范围长度之间的差,该半范围长度是当前和先前成本地图网格区域的半径、半长度或半宽度;或者当前成本地图网格区域的当前半范围定向与先前生成的cpm中报告的先前成本地图网格区域的半范围定向之间的差,半范围定向是坐标系中半范围长度的定向。
[0351]
示例25包括示例1-24和/或本文中的某个(些)其他示例的方法,进一步包括:由its-s中的cps元件生成cpm或包括感知对象集群容器的另一cpm,感知对象集群容器是包括感知对象集群数据的数据结构,感知对象集群数据表示彼此之间在预定义距离内并且以相同或相似的速度和行进方向移动的感知对象的组;以及由cps元件将cpm传送或广播到距离its-s在预定义距离内的一个或多个邻近its-s。
[0352]
一种示例实现方式是一种边缘计算系统,该边缘计算系统包括用于调用或执行示例1-25或者本文中所描述的其他主题的操作的相应边缘处理设备和节点。另一示例实现方式是一种客户端端点节点,该客户端端点节点可操作以用于调用或执行示例1-25或者本文中所描述的其他主题的操作。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的聚合节点、网络中枢节点、网关节点、或核心数据处理节点,该聚合节点、网络中枢节点、网关节点、或核心数据处理节点可操作以用于调用或执行示例1-25或者本文中所描述的其他主题的操作。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的接入点、基站、路边单元、或内部单元,该接入点、基站、路边单元、或内部单元可操作以用于调用或执行示例1-25或者本文中所描述的其他主题的操作。另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的边缘供应节点、服务编排节点、应用编排节点、或多租户管理节点,该边缘供应节点、服务编排节点、应用编排节点、或多租户管理节点可操作以用于调用或执行示例1-25或者本文中所描述的其他主题的操作。
[0353]
另一示例实现方式是一种处于边缘计算系统内或耦合至边缘计算系统的边缘节点,该边缘节点操作边缘供应服务、应用或服务编排服务、虚拟机部署、容器部署、功能部署、以及计算管理,该边缘节点可操作以用于调用或执行示例1-25或者本文中所描述的其
25或其部分中的任一项的使用或以其他方式涉及示例1-25或其部分中的任一项的api或定义函数、方法、变量、数据结构、协议等的规范。示例z14包括多接入边缘计算(mec)主机,该主机执行作为在虚拟化基础设施上实例化的一个或多个mec应用的一部分的服务,该服务与示例1-25或其部分中的任一项相关,并且其中mec主机被配置成用于根据来自一个或多个etsi mec标准系列的标准进行操作。示例z15包括如本文中所示和所描述的无线网络中的信号。示例z16包括如本文中所示和所描述的无线网络中的通信方法。示例z17包括用于提供如本文中所示和所描述的无线通信的系统。示例z18包括用于提供如本文中所示和所描述的无线通信的设备。vi.术语
[0355]
如本文中所使用,单数形式的“一”(“a”、“an”)和“该”(“the”)旨在也包括复数形式,除非上下文另外清楚地指示。还将理解,当在本说明书中使用术语“包括”(“comprise”和/或“comprising”)时,其指定所陈述的特征、整数、步骤、操作、元件、和/或组件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元件、组件、和/或其群组的存在或添加。短语“a和/或b”意指(a)、(b)或(a和b)。出于本公开的目的,短语“a、b和/或c”意指(a)、(b)、(c)、(a和b)、(a和c)、(b和c)或(a、b和c)。说明书可使用短语“在实施例中”或“在一些实施例中”,其可各自指代相同或不同实施例中的一个或多个实施例。此外,如相对于本公开的实施例所使用的术语“包含”、“包括”、“具有”等是同义的。
[0356]
本文中使用术语“耦合的”、“通信地耦合的”及其派生词。术语“耦合的”可意指两个或更多个元件彼此处于直接的物理或电接触,可意指两个或更多个元件间接地彼此接触但仍彼此协作或交互,和/或可意指一个或多个其他元件被耦合或连接在被称为彼此耦合的元件之间。术语“直接耦合的”可意指两个或更多个元件彼此直接接触。术语“通信地耦合的”可意指两个或更多个元件可通过通信手段彼此联系,通过通信手段包括通过线或其他互连连接、通过无线通信信道或墨迹,等等。
[0357]
术语“电路系统”是指被配置成用于执行电子设备中的特定功能的电路或具有多个电路的系统。电路或电路的系统可以是被配置成用于提供所描述的功能的一个或多个硬件组件的部分或包括该一个或多个硬件组件,该一个或多个硬件组件诸如逻辑电路、处理器(共享的、专用的或成组的)和/或存储器(共享的、专用的或成组的)、asic、fpga、可编程逻辑控制器(plc)、soc、封装中系统sip、多芯片封装(mcp)、dsp等。另外,术语“电路系统”也可指代一个或多个硬件元件与程序代码的组合,用于执行该程序代码的功能。一些类型的电路系统可执行一个或多个软件或固件程序,以提供所描述的功能中的至少一些。此类硬件元件与程序代码的组合可被称为特定类型的电路系统。
[0358]
应当理解,在本说明书中所描述的功能单元或能力可能已被称为或标记为组件或模块,从而特别强调其实现方式的独立性。此类组件可由任何数量的软件或硬件形式来具体化。例如,组件或模块可以被实现成硬件电路,该硬件电路包括定制的超大规模集成(vlsi)电路或门阵列、诸如逻辑芯片、晶体管之类的现成的半导体,或其他分立的组件。组件或模块也可被实现在可编程硬件设备中,诸如现场可编程门阵列、可编程阵列逻辑、可编程逻辑器件等。组件或模块也可被实现在用于由各种类型的处理器执行的软件中。可执行代码的所标识的组件或模块可以例如包括计算机指令的一个或多个物理或逻辑框,其可被组织成例如对象、过程、或函数。然而,所标识的组件或模块的可执行对象不必在物理上在
一起,而是可包括存储在不同位置处的不同指令,当这些指令在逻辑上结合在一起时,包括组件或模块,并且为该组件或模块实现所声称的目的。
[0359]
实际上,可执行代码的组件或模块可以是单条指令或许多指令,并且甚至可以分布在若干不同的代码段上,分布在不同的程序之间以及跨若干存储器设备或处理系统分布。具体而言,所描述的过程的一些方面(诸如代码重写和代码分析)可能在与在其中部署代码的处理系统(例如,在嵌入在传感器或机器人的计算机中)不同的处理系统(例如,在数据中心中的计算机中)上进行。类似地,操作数据在此可被标识并示出在组件或模块内,并且能以任何合适的形式被具体化并且可以被组织在任何合适类型的数据结构内。操作数据可作为单个数据集被收集,或者可被分布不同的位置上(包括在不同存储设备上),并且可以至少部分地仅作为系统或网络上的电子信号存在。组件或模块可以是无源或有源的,包括可操作以执行期望功能的代理。
[0360]
如本文中所使用,术语“处理器电路系统”是指能够顺序地且自动地执行算术或逻辑操作序列,记录、存储和/或传递数字数据的电路系统,是该电路系统的部分,或者包括该电路系统。术语“处理器电路系统”可指一个或多个应用处理器、一个或多个基带处理器、物理cpu、单核处理器、双核处理器、三核处理器、四核处理器、和/或能够执行或以其他方式操作计算机可执行指令的任何其他设备,这些计算机可执行指令诸如程序代码、软件模块和/或函数进程。术语“应用电路系统”和/或“基带电路系统”可视为与“处理器电路系统”是同义的,或可被称为“处理器电路系统”。
[0361]
本文中所使用的术语“存储器”和/或“存储器电路系统”是指用于存储数据的一个或多个硬件设备,包括ram、mram、pram、dram、和/或sdram、核存储器、rom、磁盘存储介质、光学存储介质、闪存设备或用于存储数据的其他机器可读介质。术语“计算机可读介质”可包括但不限于存储器、便携式或固定存储设备、光存储设备以及能够存储、包含或承载指令或数据的各种其他介质。
[0362]
如本文中所使用,术语“接口电路系统”是指实现两个或更多个组件或设备之间的信息交换的电路系统,是该电路系统的部分,或者包括该电路系统。术语“接口电路系统”可指一个或多个硬件接口,例如,总线、i/o接口、外围组件接口、网络接口卡,等等。
[0363]
术语“元件”是指在给定的抽象水平不可分并且具有清楚地限定的边界的单元,其中,元件可以是任何类型的实体,包括例如一个或多个设备、系统、控制器、网络元件、模块等、或其组合。术语“设备”是指物理实体,该物理实体被嵌入在其附近的另一物理实体内部或附连至其附近的另一物理实体,具有传达来自该物理实体的数字信息或向该物理实体传达数字信息的能力。术语“实体”是指架构或设备的不同组件、或作为有效载荷被传递的信息。术语“控制器”是指具有影响物理实体(诸如通过改变其状态或使物理实体移动)的能力的元件或实体。
[0364]
如本文中所使用,术语“边缘计算”涵盖致力于针对端点用户(客户端设备、用户装备等)减少等待时间并增加吞吐量而将处理活动和资源(例如,计算、存储、加速资源)朝向网络的“边缘”移动的分布式计算的许多实现方式。此类边缘计算实现方式典型地涉及从经由无线网络可访问的一个或多个位置在类云服务、功能、应用和子系统中提供此类活动和资源。由此,对本文中所使用的网络、集群、域、系统或计算布置的“边缘”的引用是起作用的分布式计算元件的群组或分组,并且由此一般与图论中使用的“边缘”(链接或连接)无关。
经由移动无线网络(例如,蜂窝和wifi数据网络)可访问的边缘计算应用和服务的特定布置可被称为“移动边缘计算”或“多接入边缘计算”,其可通过缩写“mec”来引用。本文中对“mec”的使用也可指代由欧洲电信标准协会(etsi)颁布的标准化实现方式,被称为“etsi mec”。etsi mec规范所使用的术语通过引用总体结合于此,除非本文中提供冲突的定义或使用。
[0365]
如本文中所使用,术语“计算节点”或“计算设备”是指实现边缘计算操作的一方面的可标识的实体(不论是较大系统的部分、分布式系统集合、还是独立装置)。在一些示例中,计算节点可被称为“边缘节点”、“边缘设备”、“边缘系统”,而不论作为客户端、服务器还是中间实体来进行操作。计算节点的特定实现方式可被并入到服务器、基站、网关、路边单元、内部单元、ue或终端消费设备等等中。
[0366]
如本文中所使用的术语“计算机系统”是指任何类型经互连的电子设备、计算机设备、或其组件。另外,术语“计算机系统”和/或“系统”可指计算机的彼此通信地耦合的各种组件。此外,术语“计算机系统”和/或“系统”可指彼此通信地耦合并且被配置成用于共享计算和/或联网资源的多个计算机设备和/或多个计算系统。
[0367]
如本文中所使用的术语“架构”是指计算机架构或网络架构。“网络架构”是在包括通信协议、接口和介质传输的网络中软件和/或硬件元件的物理和逻辑设计或布置。“计算机架构”是在包括软件和/或硬件之间的交互的技术标准的计算系统或平台中的软件和/或硬件元件的物理和逻辑设计或布置。
[0368]
如本文中所使用,术语“装置”、“计算机装置”等等是指具有程序代码(例如,软件或固件)的、专门被设计成用于提供特定计算资源的计算机设备或计算机系统。“虚拟装置”是用于由使计算机装置虚拟化或模仿计算机装置或者以其他方式专用于提供特定的计算资源的、由装配有管理程序的设备实现的虚拟机镜像。
[0369]
如本文中所使用的术语“用户装备”或“ue”是指具有无线电通信能力的设备,并且可描述通信网络中网络资源的远程用户。术语“用户装备”或“ue”可被认为与以下各项同义并且可被称为以下各项:客户端、移动式装置、移动设备、移动终端、用户终端、移动单元、移动站、移动用户、订户、用户、远程站、接入代理、用户代理、接收机、无线电装备、可重配置无线电装备、可重配置移动设备等。此外,术语“用户装备”或“ue”可包括:任何类型的无线/有线设备、或包括无线通信接口的任何计算设备。术语“站”或“sta”是指作为对无线介质(vm)的介质访问控制(mac)和物理层(phy)接口的可单独寻址的实例的逻辑实体。术语“无线介质”或wm”是指用于实现协议数据单元(pdu)在无线局域网(lan)的对等物理层(phy)实体之间的传输的介质。
[0370]
如本文中所使用的术语“网络元件”是指用于提供有线或无线通信网络服务的物理或虚拟化的装备和/或基础设施。术语“网络元件”可被认为与以下各项同义和/或被称为以下各项:联网的计算机、联网硬件、网络装备、网络节点、路由器、交换机、中枢、网桥、无线电网络控制器、ran设备、ran节点、网关、服务器、虚拟化vnf、nfvi等等。
[0371]
如本文所使用的,术语“接入点”或“ap”是指包含一个站(sta)并且经由针对相关联的sta的无线介质(wm)提供对分发服务的访问的实体。至少在一些实施例中,ap包括sta和分发系统访问功能(dsaf)。如本文中所使用,术语“基站”是指无线电接入网络(ran)中的网络元件,该无线电接入网络诸如负责一个或多个蜂窝小区中将无线电信号发送至用户装
备(ue)或从用户装备(ue)接收无线电信号的第四代(4g)或第五代(5g)移动通信网络。基站可以具有集成式天线,或者可通过馈电电缆连接至天线阵列。基站使用专门的数字信号处理和网络功能硬件。在一些示例中,出于灵活性、成本、以及性能,可将基站分成采用软件进行操作的多个功能块。在一些示例中,基站可包括演进节点b(enb)或下一代节点b(gnb)。在一些示例中,基站可操作或包括计算硬件,以作为计算节点来进行操作。然而,在本文中所讨论的场景中的许多场景中,ran基站可以以接入点(例如,无线网络接入点)或其他网络接入硬件来代替。
[0372]
如本文中所使用,术语“中央局”(或co)指示可访问或所限定的地理区域内的、用于电信基础设施的聚合点,通常电信服务提供商传统上将用于一种或多种类型的接入网络的切换装备定位在其中。co可以在物理上被设计成用于容纳电信基础设施装备或计算、数据存储和网络资源。然而,co不需要是由电信服务提供商指定的位置。co可主控用于边缘应用和服务(或者甚至类云服务的本地实现方式)的任何数量的计算设备。
[0373]
术语“云计算”或“云”是指用于在具有按需要自服务供应和管理并且不具有用户的主动管理的情况下启用对可扩展且弹性的可共享资源池的网络访问的范式。云计算提供云计算服务(或云服务),该云计算服务(或云服务)是经由使用所定义的接口(例如,api,等等)唤起的云计算而提供的一项或多项能力。术语“计算资源”或简称为“资源”是指在计算机系统或网络内具有有限的可用性的任何物理或虚拟组件或对此类组件的使用。计算资源的实例包括在一段时间内对以下各项的使用/访问:服务器、(多个)处理器、存储装备、存储器设备、存储器区域、网络、电功率、输入/输出(外围)设备、机械设备、网络连接(例如,信道/链路、端口、网络插槽等)、操作系统、虚拟机(vm)、软件/应用、计算机文件等等。“硬件资源”可以指由(多个)物理硬件元件提供的计算、存储和/或网络资源。“虚拟化资源”可指由虚拟化基础设施向应用、设备、系统等提供的计算、存储、和/或网络资源。术语“网络资源”或“通信资源”可指可由计算机设备/系统经由通信网络访问的资源。术语“系统资源”可指用于提供服务的任何种类的共享实体,并且可包括计算和/或网络资源。系统资源可被认为是通过服务器可访问的一组连贯的功能、网络数据对象或服务,其中此类系统资源驻留在单个主机或多个主机上并且是可清楚标识的。
[0374]
术语“工作负荷”指在实践段期间或在特定时刻由计算系统、设备、实体等执行的工作量。工作负荷可被标识为基准,诸如响应时间、吞吐量(例如,在一段时间内完成多少工作),等等。另外地或替代地,工作负荷可被表示为以下各项:存储器工作负荷(例如,程序执行以存储临时或永久数据且执行中间计算所需的存储器空间的量)、处理器工作负荷(例如,在给定时间段期间或特定时刻由处理器执行的指令数量)、i/o工作负荷(例如,在给定时间段期间或特定时刻输入和输出或系统访问的数量)、数据库工作负荷(例如,在时间段期间的数据库查询的数量)、网络相关的工作负荷(例如,网络附连的数量、移动性更新的数量、无线电链路失败的数量、移交的数量、要通过空中接口传递的数据量等),等等。可使用各种算法来确定工作负荷和/或工作负荷特性,其可基于前述工作负荷类型中的任一者。
[0375]
如本文中所使用,术语“云服务提供商”(或csp)指示典型地对大规模的“云”资源进行操作的组织,这些大规模的“云”资源由集中式、区域的、和边缘数据中心组成(例如,如在公共云的情境中所使用)。在其他示例中,csp也可被称为云服务运营商(cso)。对“云计算”的引用一般是指在相对于边缘计算具有至少一些增加的等待时间、距离、或约束的远程
位置处由csp或cso提供的计算资源和服务。
[0376]
如本文中所使用,术语“数据中心”是指旨在容纳多个高性能计算和数据存储节点以使得大量的计算、数据存储和网络资源存在于单个位置处的有目的设计的结构。这通常使得需要专门的机架和封装系统、合适的加热、冷却、通风、安全性、灭火、以及功率递送系统。在一些情境中,该术语还可指代计算和数据存储节点。在集中式数据中心或云数据中心(例如,最大的数据中心)、区域数据中心、以及边缘数据中心(例如,最小的数据中心)之间,数据中心的规模可能有所不同。
[0377]
如本文中所使用,术语“接入边缘层”指示基础设施边缘的、最靠近于终端用户或设备的子层。例如,此类层可通过被部署在蜂窝网络位置处的边缘数据中心来满足。接入边缘层作为基础设施边缘的前线来起作用,并且可连接至层级结构中较高的聚合边缘层。
[0378]
如本文中所使用,术语“聚合边缘层”指示距接入边缘层一跳的基础设施边缘的层。该层可以要么作为中等规模的数据中心存在于单个位置中,要么可由多个互连的微型数据中心形成,以形成具有接入边缘的分层拓扑,从而允许相比于仅有接入边缘更大的协作、工作负荷故障转移、以及可缩放性。
[0379]
如本文所使用的,术语“网络功能虚拟化”(或nfv)指示使用工业标准虚拟化和云计算技术、将nf从专有硬件设备内的嵌入式服务迁移到在标准化cpu(例如,在标准和服务器内,诸如包括至强tm(xeontm)或者epyctm或opterontm处理器的那些标准化cpu)上运行的基于软件的虚拟化nf(或vnf)。在一些方面,nfv处理和数据存储将在基础设施边缘内的、直接连接至本地蜂窝站点的边缘数据中心处发生。
[0380]
如本文所使用的,术语“虚拟化网络功能”(或vnf)指示在多功能多目的计算资源(例如,x86、arm基础架构)上操作的基于软件的nf,其可代替于专用物理装备而被nfv使用。在一些方面,若干vnf将在基础设施边缘处的边缘数据中心上操作。
[0381]
如本文中所使用的,术语“边缘计算”是指对处于较靠近于网络的“边缘”或网络的“边缘”的集合的位置处的计算和资源的实现、协调和使用。在网络的边缘处部署计算资源可减少应用和网络等待时间,减少网络回程通信量和相关联的能耗,改善服务能力,改善对安全或数据隐私性要求的合规性(尤其是与常规云计算相比),并且改善总拥有成本。如本文中所使用,术语“边缘计算节点”是指以设备、网关、桥接器、系统或子系统、组件形式的能够进行计算的元件的真实世界的、逻辑的、或虚拟化的实现方式,而不论是在服务器、客户端、端点、iot设备还是对等模式下操作,并且不论位于网络的“边缘”处还是位于进一步处于网络内的连接的位置处。一般而言,对本文中所使用的“节点”的引用与“设备”、“组件”和“子系统”是可互换的;然而,对“边缘计算系统”或“边缘计算网络”的引用一般是指分布式架构、组织、或多个节点和设备的集合,并且边缘计算系统或边缘计算网络被组织成用于完成或提供边缘计算设置中的服务或资源中的某个方面。
[0382]
术语“物联网”或“iot”是指具有能够以较少的人类交互或在没有人类交互的情况下传输数据的相互联系的计算设备、机械和数字机器的系统,并且可涉及诸如实时分析、机器学习和/或ai、嵌入式系统、无线传感器网络、控制系统、自动化(例如,智慧家居、智慧建筑和/或智慧城市技术)等等。iot设备通常是不具有重度计算或存储能力的低功率设备。“边缘iot设备”可以是被部署在网络的边缘处的任何种类的iot设备。
[0383]
如本文中所使用,术语“集群”是指以物理实体(例如,不同的计算系统、网络或网
络群组)、逻辑实体(例如,应用、功能、安全性构造、容器)等等的形式、作为边缘计算系统(或多个边缘计算系统)的部分的实体集合或实体分组。在一些位置中,“集群”也指代“群组”或“域”。集群的成员关系可基于包括来自动态成员关系或基于属性的成员关系、来自网络或系统管理场景、或来自下文所讨论的各种示例技术的、可添加、修改或移除集群中的实体的状况或功能而被修改或影响。集群还可包括多个层、级别或属性,或与多个层、级别或属性相关联,该多个层、级别或属性包括基于此类层、级别或属性的安全性特征和结果的变型。
[0384]
如本文中所使用,术语“无线电技术”是指用于电磁辐射的无线传送和/或接收以进行信息传递的技术。术语“无线电接入技术”或“rat”是指用于至基于无线电的通信网络的底层物理连接的技术。术语“v2x”是指交通工具对交通工具(v2v)、交通工具对基础设施(v2i)、基础设施对交通工具(i2v)、交通工具对网络(v2n)、和/或网络对交通工具(n2v)通信和相关联的无线电接入技术。
[0385]
如本文中所使用,“通信协议”(有线或无线的)是指由通信设备/系统实现以与其他设备进行通信的一组标准化规则或指令,包括用于对数据进行打包/拆包、对信号进行调制/解调的指令,协议栈的实现方式,等等。
[0386]
如本文中所使用的术语“信道”是指用于传达数据或数据流的任何有形或无形的传输介质。术语“信道”可与“通信信道”、“数据通信信道”、“传输信道”、“数据传输信道”、“接入信道”、“数据访问信道”、“链路”、“数据链路”、“载波”、“射频载波”、和/或表示传达数据所通过的路径或介质的任何其他类似术语同义,和/或等同于这些术语。此外,如本文中所使用的术语“链路”是指两个设备之间出于传送和接收信息目的通过rat进行的连接。
[0387]
如本文中所使用的术语“实例化(instantiate、instantiation)”等等是指实例的创建。“实例”还指对象的具体发生,该对象例如可在程序代码的执行期间发生。术语“信息元素”是指包含一个或多个字段的结构元素。术语“字段”是指信息元素的各个内容或包含内容的数据元素。“数据库对象”、“数据结构”或类似术语可指采用对象、属性-值对(avp)、关键字-值对(kvp)、元组等形式的任何信息表示,并且可包括变量、数据结构、函数、方法、类、数据库记录、数据库字段、数据库条目、数据和/或数据库条目之间的关联(也被称为“关系”)、区块链实现方式中的区块以及区块之间的链接等等。术语“数据元素”或“de”是指包含一个单数据的数据类型。术语“数据帧”或“df”是指包含按预定义的次序的多于一个的数据元素的数据类型。
[0388]
如本文所使用的,术语“可靠性”是指计算机相关组件(例如,软件、硬件或网络元件/实体)一贯地执行期望的功能和/或根据规范进行操作的能力。在网络通信的情境下的可靠性(例如,“网络可靠性”)可指网络进行通信的能力。网络可靠性还可以是将指定数据量从源递送至目的地(或宿)的概率(或者是对该概率的测量)。
[0389]
术语“应用”可指用于在操作环境中实现某种功能的完整且可部署的包、环境。术语“ai/ml应用”或类似术语可以是包含一些ai/ml模型和应用级描述的应用。术语“机器学习”或“ml”是指使用计算系统不使用明确的指令而是依赖于模式或推断来实现算法和/或统计模型以执行(多个)特定任务。ml算法基于样本数据(被称为“训练数据”、“模型训练信息”等)建立或估计(多个)数学模型(被称为“ml模型”等),以便在没有被明确编程为执行此类任务的情况下作出预测或决策。一般而言,ml算法是从相对于某项任务和某个性能测量
的经验学习的计算机程序,并且ml模型可以是在ml算法利用一个或多个训练数据集被训练之后创建的任何对象或数据结构。在训练之后,ml模型可以用于作出关于新的数据集的预测。虽然术语“ml算法”是指不同于术语“ml模型”的概念,但是如本文中所讨论的这些数据可出于本公开的目的而可互换地使用。
[0390]
术语“会话”是指两个或更多个通信设备之间、两个或更多个应用实例之间、计算机与用户之间、或任何两个或更多个实体或元件之间的临时的且交互性的信息互换。
[0391]
术语“自我its-s”是指正在考虑的its-s,术语“自我交通工具”是指嵌入正在考虑的its-s的交通工具,而术语“邻居”是指不同于自我its-s和自我交通工具的其他its-s。
[0392]
虽然先前的示例中的许多示例在使用特定的蜂窝/移动网络技术的情况下(包括在使用4g/5g 3gpp网络组件(或预期的基于太赫兹的6g/6g+技术)的情况下)被提供,但是将理解的是,这些示例可应用于广域无线网络和局域无线网络的许多其他部署、以及有线网络的整合(包括光学网络及相关联的光纤、收发机等)。
[0393]
虽然已经参考特定示例性方面描述了这些实现方式,但将显而易见的是,可在不背离本发明的较宽范围的情况下对这些方面作出各种修改和改变。本文中所描述的布置和过程中的许多布置和过程可以与用于提供更大的带宽/吞吐量的实现方式以及用于支持可以使其可用于被服务的边缘系统的边缘服务选择的实现方式组合或并行地使用。相应地,说明书和附图应当被认为是说明性的,而不是限制性意义的。形成本文的部分的所附附图以说明性而并非限制性方式示出主题可在其中被实施的特定方面。足够详细地描述了所图示的方面以使本领域的技术人员能够实施本文中所公开的教导。可利用并由此推导出其他方面,以使得可在不背离本公开的范围的情况下作出结构的和逻辑的替换和改变。因此,该具体实施方式不是在限制性的意义上进行的,并且各个方面的范围仅由所附权利要求书以及此类权利要求书所授权的等效方案完整范围来限定。
[0394]
可在本文中单独地和/或共同地引用发明性主题的此类方面,如果实际上公开了多于一个方面或发明性概念,则这仅仅是为方便起见而并不旨在主动将本技术的范围限于任何单个方面或发明性概念。由此,虽然在本文中已经图示并描述了特定方面,但应当领会,预计能够实现相同目的的任何布置可替换所示的特定方面。本公开旨在涵盖各个方面的任何和全部修改或变体。在回顾以上描述时,以上各方面和本文中未具体描述的其他方面的组合就对于本领域内技术人员而言将是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1