摄像机及其方法与流程
1.本发明首先涉及一种摄像机,其具有电子图像传感器。此外,本发明包括一种用于处理图像的方法,所述图像借助于具有电子图像传感器的摄像机被拍摄或已被拍摄。
背景技术:
2.由现有技术公知了在大的变化幅度内的具有作为图像传感器的cmos芯片的电子摄像机。此外,由现有技术充分公知了用于数字再处理和处理由图像传感器提供的数字图像或数字图像数据的数学算法。
3.借助于所述算法可以从由图像传感器提供的图像计算出例如全部干扰结构。概念干扰结构在此主要理解为不期望的污物或脏物和/或在电子摄像机或摄像机镜头的光路中的部件上由生产引起的缺陷,所述干扰结构不由借助于摄像机待成像的真实物体造成。
4.然而通过费事的数字清除过程也可能无意地不可挽回地去除实际的并且按规定地再现物体的图像内容。因此不再实现对通过电子摄像机待成像的物体的可靠的可信的图像再现。
技术实现要素:
5.因此本发明的任务在于,提供一种电子摄像机,其中,很大程度上不发生通过用于去除在光路中的部件上的、特别是呈污物形式的干扰结构的数学算法而无意地去除实际的图像内容。
6.开头所提及的任务首先通过如下方式来解决,即在光路中在图像传感器之前布置至少一个标记用于识别照射情况和/或干扰结构。
7.由此可以首先评估当前的光圈,从而能够推断出电子摄像机的照射情况。至少一个标记关于图像传感器的空间位置、标记的尺寸以及形状是恰好已知的,从而由标记引起的阴影或遮影在图像传感器上的位置和几何形状同样是已知的。对光圈或光圈值的评估根据由至少一个标记投到图像传感器的表面上的阴影实现,所述阴影可以例如发散地或模糊地或高对比地或清晰地轮廓化地呈现。在足够的照射情况下,所有如同标记在图像传感器上产生的那样类似的阴影则可以被识别为干扰结构并且借助于适合的用于图像处理的数学算法从图像被计算出。由此不损害地保留实际的原始图像信息。当实际的图像结构不匹配摄像机的识别出的当前的照射情况或被评估的光圈值时,则避免无意地删除所述实际的图像结构。标记阴影优选地最后从图像被计算出。用于图像处理所需的搜索空间被大大减小,从而相关的算法借助少的代码行是足够的并且能够更快地实施。根据本发明的电子摄像机例如设置用于流水线应用和显微镜应用。特别是当被评估的光圈值k等于f/16,f/27或者更大时,则认为是足够的照射情况。在所述情况中给出小的光圈口径,由此产生的图像具有高的深度清晰度并且更容易地实现借助于适合的用于图像处理的算法计算出干扰结构。
8.优选地,至少一个标记被加工到对于光辐射能通过的载体中。载体可以例如是传感器玻璃。传感器玻璃固定地装入到摄像机中并且如同例如附加滤光器那样不能被更换,
从而无缺陷性具有突出的重要性。此外,标记在传感器玻璃上和/或中的集成的设计方案是非常机械鲁棒的。此外,载体可以设计为固定地装入到摄像机中的滤光器、例如所谓的红外截止滤光片。
9.在一个技术有利的设计方案中,至少一个标记被加工到载体外面中。由此准确地确定标记和图像传感器之间的轴向间距。标记的制造可以例如借助于激光进行。
10.优选地,标记与载体边缘隔开间距地布置。在载体的边缘区域中对于通常的光学畸变不能完全排除。通过将标记朝向光轴的方向在边缘外侧定位来减小在边缘侧可能的光学畸变的影响。环绕的边缘区域通常具有传感器宽度和传感器高度的大约10%至30%的宽度。
11.在一个另外的设计方案的情况中,标记布置在光轴中。由实现的、标记在之后的图像中的中心位置使发现由标记引起的遮影变得容易。此外,标记在中心位置中的阴影很大程度上避免不期望的光学畸变。
12.优选地,标记线状地或面状地、特别是点状地或圆形地设计。基于标记在图像平面中优选地规则的几何形状和延伸实现通过已知的用于数字图像处理数学算法的好的可识别性。标记的尺寸可以例如处于10μm至50μm的范围内。
13.在一个有利的进一步方案中,摄像机包括计算机单元,所述计算机单元设置用于,在检测到的图像中根据至少一个标记检测照射情况并且由此识别干扰结构并且将所述干扰结构从图像被计算出。因此,在足够的照射情况下能够实现识别干扰结构并且清除所述干扰结构,也就是说,能够实现去除在数字图像中的由干扰结构引起的阴影或者由此引起的图像缺陷。
14.此外,开头所提及的任务通过一种用于处理图像的方法来解决,所述图像借助于具有电子图像传感器的摄像机、特别是借助于根据权利要求1至7中至少一项所述的摄像机被拍摄或已被拍摄,所述方法包括以下步骤:
15.a)搜索布置在摄像机的光路中的至少一个标记的再现特别是用于检测照射情况,和
16.b)基于搜索的结果和由此检测到的照射情况来决定是否针对干扰结构彻底搜索所述图像。
17.由此可以由于干扰结构、例如污物、异物颗粒或由生产引起的干扰部位导致的成像误差在没有无意地使实际的图像部分失真的危险的情况下在由图像传感器产生的图像中更容易地被计算出。在评估照射情况之后是否在一个继续的步骤中进行针对干扰结构彻底搜索所述图像并且将所述干扰结构计算出的决定,首先与在步骤a)中进行的对照射情况、特别是被评估的光圈的检测的结果相关。具有小的光圈口径的大的光圈值引起由图像传感器产生的图像的高的深度清晰度,从而可能的干扰结构的阴影通常特别轮廓清晰地呈现在数字图像中并且因此具有特别消极的影响。
18.在所述方法的一个进一步方案中设置,为了识别照射情况而根据至少一个标记在由图像传感器产生的图像中的再现来评估特别是设定的光圈值。因此能够足够准确地确定电子摄像机的照射情况,也就是说,特别是能够至少评估当前设定的光圈。
19.在所述方法的一个有利的设计方案中,借助于计算机单元至少部分地计算出在图像中被发现的干扰结构。在借助于图像传感器拍摄的图像中被确定的干扰结构由此可以在
适合的照射情况下更容易地借助适合的用于图像处理的算法完全自动地被去除。数字计算单元为了这个目的而具有能实现实时地从图像去除不期望的干扰结构的性能强度。
附图说明
20.下面借助示意性的附图具体地阐述本发明的优选的实施例。附图中:
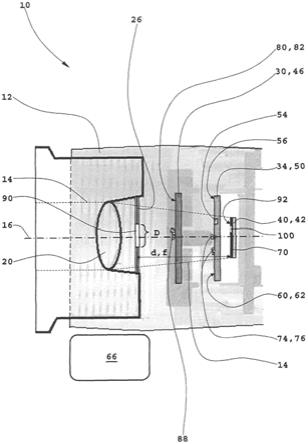
21.图1示出根据本发明的电子摄像机的示意性的纵截面图,
22.图2示出电子摄像机的以光圈值k等于f/16产生的图像,和
23.图3示出电子摄像机的以光圈值k等于f/27产生的图像。
具体实施方式
24.图1示出根据本发明的电子摄像机的示意性的纵截面图。
25.摄像机10还包括几乎空心柱状的壳体12以及光路14和光轴16。壳体12相对于光轴16基本上旋转对称地构造。沿着光轴16布置具有至少一个透镜的镜头20、光圈26、第一载体30、第二载体34以及电子图像传感器40、例如cmos芯片42或类似部件。两个板状的载体30,34隔开间距地彼此平行地定位,分别是对于光辐射能通过的并且垂直于光轴16定向。第一载体30在此仅仅示例性地设计为所谓的红外截止滤光片46,并且第二载体34在此仅仅示例性地设计为传感器玻璃50。不仅红外截止滤光片46而且传感器玻璃50固定地装入到摄像机壳体12中。
26.在光路14内在图像传感器40之前将确定的标记54在此仅仅示例性地布置在光路14的光轴16的径向外部。标记54为了这个目的而构造在电子图像传感器40的第二载体34或传感器玻璃50的载体外面60或朝向镜头20的方向的传感器外面62中。此外,标记54与第二载体34的在周向侧环绕的载体边缘56隔开间距地布置,其中,框形的载体边缘56占据第二载体34的未示出的高度和宽度的大约10%至30%。
27.标记54可以例如借助于激光、借助于已知的激光刻印方法、通过化学蚀刻或借助于另外的材料去除方法在载体34的生产过程期间或之后被制造。标记54原则上可以具有任意的几何形状和面延伸。标记54例如可以线状地或任意面状地、例如点状地、圆形地、椭圆形地、蛋形地、四边形地等实施。此外,标记54可以具有规则的或不规则的、网格状的或图案式的样式,所述样式可以例如通过局限在第二载体34的有限的面区域上的、规律的重复来实现几何结构、例如点、圆、椭圆、蛋形、直线、弧线、多边形或诸如此类。替换地,标记可以设计有至少一个图形的类似于代码的符号或标识、特别是数字、字母或诸如此类,所述标记能够借助于ocr算法(所谓的“optical character recognition,光学字符识别”)特别容易地被识别和评估。载体34的至少一个标记54的尺寸优选地在纵向方向和横向方向上为在10μm和50μm之间,相应地包括区间边界。在任何情况中,标记54与第二载体34的其余区域相比引起至少轻微地衰减通过的光或光辐射。
28.在此示例性地给电子图像传感器40配置性能卓越的数字计算机单元66,所述数字计算机单元优选地直接集成到摄像机10中。替换地,计算机单元66也可以通过与摄像机10连接的、性能强的外部pc实现,用于探测确定地设计的标记54的算法则在所述外部pc上被实施。,当集成到摄像机10中的计算机单元66的计算性能不是足够高的时,则这种情况是特别有利的。借助于计算机单元66和在其上执行的用于数字图像处理的数学算法可以优选地
实时地识别并且处理由电子图像传感器40产生的数字图像70。
29.在此示例性地两个干扰结构74,76位于第二载体34的载体外面60上。所述干扰结构74,76可以是污物颗粒、异物颗粒例如绒毛,花粉,微生物,脂肪颗粒,微尘或类似物。第一干扰结构74位于光轴16的区域中,而第二干扰结构76与光轴16错开地位于径向外部。两个干扰结构74,76原则上可以是外界的异物颗粒或由生产引起的缺陷部位或干扰部位、例如刮痕、磨痕、微裂纹、气体泡或空气泡等,所述外界的异物颗粒或由生产引起的缺陷部位或干扰部位通常至少部分地位于第二载体34内部。如图所示地,呈在摄像机10的光轴16的区域中的污物颗粒形式的干扰结构88同样在光轴16的区域内位于第一载体30的载体外面80或红外截止滤光片46的朝向镜头20方向的滤光器外面82上。
30.摄像机10的光圈26具有带有直径d的光圈口径90,而光圈26和电子图像传感器40的表面92之间的间距d等于d,由此在此示例性地根据关系k等于d/d得出光圈值k。
31.基于确定地加工的标记54的以高的精度已知的几何形状、即延伸以及形状,也使由所述标记在图像传感器40上产生的阴影100或标记阴影关于位置和几何形状准确地被已知并且借助于计算机单元相对容易地被确定位置和评估。
32.在大的光圈值k的情况中通常实现最优的照射情况,阴影100或标记阴影能够基于于是设定的高的对比度以及大的深度清晰度极好地被识别和评估,从而干扰结构74,76也能够更容易地借助于计算机单元66的图像处理算法被发现并且必要时能够被处理。所述图像处理算法对于数字图像评估领域的技术人员而言由现有技术充分已知。
33.为了发现干扰结构74,76,图像70可以例如被转换成未示出的灰度值图像,并且处于确定的灰度值区间内的图像像素(所述灰度值区间可以例如通过关于标记阴影的灰度值的高斯分布被确定)借助于计算机单元66被评估为不期望的干扰结构并且被计算出。通过在干扰结构74,76的边缘上的衍射效应使干扰结构74,76的轮廓很大程度上是无关紧要的。借助于用于图像处理的算法被计算出的干扰结构74,76则可以例如通过最有可能的实际的图像结构替代,最有可能的实际的图像结构又根据直接邻近于干扰结构74,76的实际的或原本的结构得出。优选地,阴影100也从图像70被计算出。
34.而在小的光圈数k下在图像传感器40上或在数字图像70中出现相对模糊的、不清晰的或发散的、低对比度的阴影100,从而借助于计算机单元和算法对干扰结构74,76的计算也不同程度费事地进行并且可能为了在不修正光圈值k的情况达到最优结果而不再是实际可行的。通过预知标记54的阴影100在这种情况中是低对比度的,可以将算法这样调整或参数化,以使得有意地计算出图像中的近似于对比度明显的阴影的结构,在此可以看到本发明的核心优点。
35.摄像机10主要设置用于流水线应用和显微镜应用。光圈值k越大,例如等于f/16,f/27,
…
,则用于通过镜头20射入的光的光圈口径90的对于光通过有效的口径横截面或瞳孔开口越小并且在图像70中出现越大的深度清晰度。在显微镜应用中通常致力于高的深度清晰度,从而大的光圈值k是有利的。在大的光圈值k下,标记54或标记阴影以特别高的对比度并且边缘清晰地在图像70中再现。因此,干扰结构74,76可以借助于适合的数学算法相对容易地被发现和处理。镜头20的焦距的获知在摄像机10的流水线应用或显微镜应用中通常不是必要的。相同的构思方案类似地适用于电子摄像机10中的邻近于镜头的第一载体30或红外截止滤光片46的干扰结构88。
36.在根据本发明的用于处理图像的方法70中,所述图像借助于具有电子图像传感器的摄像机、特别是借助于摄像机10被拍摄或已被拍摄,在第一方法步骤a)中进行搜索布置在摄像机10的光路14中的至少一个标记54的再现或阴影100特别是用于检测布置在摄像机10的光路14中的至少一个标记54的照射情况,特别是用于检测摄像机10的当前的照射情况。在紧接着的方法步骤b)中进行基于在方法步骤a)中的搜索的结果和由此检测到的照射情况来决定,是否针对可能存在的并且要清除的干扰结构74,76彻底搜索图像70。只有当在方法步骤a)中对照射情况的检测得出足够大的光圈值k等于d/d或f/16,f/27,
…
时,则针对干扰结构74,76对图像70的彻底搜索以及最后借助于算法对所述干扰结构的去除通常是实际可行的。
37.图2示出图1的电子摄像机的以光圈值k等于f/16产生的图像,并且图3示出图1的电子摄像机的以光圈值k等于f/27产生的图像,其中,在进一步描述过程中同时参考图2,3。
38.图像70示例性地具有沿着x轴600像素(pixel)和在y轴上600像素的分辨率。光轴16相应地位于图像中心。同样适用于图3的数字图像110。
39.在图2的视图中,确定地加工的标记54由于不利的照射情况或低的k等于f/16的光圈值和与此相关的、弱对比度的模糊的成像仅仅能够困难地通过用于图像评估的算法被探测和/或处理。由于图3中的数字图像110的高的k等于f/27的光圈值和由此带来的明显更有利的照射情况,标记54能够更容易地借助于算法被检测和处理。同样适用于传感器玻璃的干扰结构74(参见图1),该干扰结构由此同样能够更容易地借助于在图1的描述的框架内所阐述的算法从图像110被计算出。图3的图像110中的其他未示出的干扰结构具有相对低的对比度。
40.本发明首先涉及一种摄像机10,其具有电子图像传感器40。根据本发明设置,在光路14中在图像传感器40之前布置至少一个标记54用于识别照射情况和/或干扰结构74,76,88。因此很大程度上避免通过用于去除光路中的部件的干扰结构的数字处理算法而无意地去除实际的图像内容,所述干扰结构特别是呈由生产引起的干扰结构或者在摄像机10运行时在红外截止滤光片46和/或传感器玻璃50的区域中出现的污物的形式。此外,本发明涉及一种用于处理图像的方法70,所述图像借助于电子图像传感器40的摄像机10被拍摄或已被拍摄。
41.附图标记列表
42.10 摄像机
43.12 壳体
44.14 光路
45.16 光轴
46.20 镜头
47.26 光圈
48.30 第一载体
49.34 第二载体
50.40 电子图像传感器
51.42 cmos 芯片
52.46 红外截止滤光片
53.50 传感器玻璃
54.54 标记
55.56 载体边缘
56.60 载体外面(第二载体)
57.62 传感器外面
58.66 数字计算机单元
59.70 数字图像
60.74 干扰结构
61.76 干扰结构
62.80 载体外面
63.82 滤光器外面
64.88 干扰结构
65.90 光圈口径
66.92 表面(图像传感器)
67.100 阴影(标记阴影)
68.110 数字图像
69.d 光圈口径(直径)
70.d,f 间距,焦距
71.k 光圈数,光圈值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1