差分时间延迟移位器装置和方法与流程
差分时间延迟移位器装置和方法
1.相关申请
2.本技术要求于2019年12月17日提交的美国临时申请no.62/949,152的权益。上述申请的全部教导通过引用并入本文。
背景技术:
3.在蜂窝通信系统中,需要最小化相邻小区基站之间的干扰,以促进小区之间的频率复用。基站发射器的辐射模式控制是减少这种小区间干扰的一种方式。例如,减少小区站点之间干扰的一种方式是通过将天线的竖直(仰角)模式向下朝向地面倾斜来减小区站点的覆盖区域。虽然这可以通过利用可调节支架机械地向下倾斜天线来实现,但该倾斜可以另选地通过使用相控阵列天线配置向下控制传输波束来实现。
4.相控阵列天线可以用于定向控制电磁(em)辐射波束。图1中示出了相控阵列天线系统的现有技术示例。天线元件12的阵列由发射器14驱动。各个天线元件的馈电电流流过移相器16。当移相器16实现的相移全部相同时,来自天线元件阵列16的传输组合形成垂直于天线轴线20的波前18。如果移相器16的相移跨阵列逐渐增加(例如,从图1中阵列的顶部到底部),则来自天线元件阵列16的传输组合形成波前22,该波前22以相对于天线轴线20呈角度θ定向。利用示例一维天线元件阵列16,可以通过改变由各个移相器16提供的相移来在单个平面(例如,竖直平面)内控制所发射的em波束。
5.可以通过改变各个个体移相器16的相移来改变天线波束的角度θ。图2示出了可以用于该目的的可变移相器28的现有技术示例。可变移相器28包括滑片臂(wiper arm)36,该滑片臂36可绕枢轴联接器38旋转,以使得滑片臂的远端扫描弧形导电条40。滑片臂36的远端与导电条40之间的联接是电容性的。当滑片臂36绕枢轴联接器38旋转时,第一端口30与第二端口32之间以及第一端口30与第三端口34之间的路径长度发生变化,这会改变第二端口32和第三端口34处的信号输出的相位。
6.因为图2中描绘的移相器28是滑动机构,所以滑片臂36需要物理地移动(例如,旋转),以改变输出端口处的相位。为了使图2的移相器远程可控,需要将步进电机或其他这种驱动机构与移相器的滑片臂相关联。移相器28和相关联的步进电机的机械特性可能会向发射器/天线系统引入不利的可靠性和性能问题。
技术实现要素:
7.在一个方面,本发明可以是一种差分时间延迟移位器,所述差分时间延迟移位器包括一对n开关,其中,n是大于1的整数。所述一对n开关可以具有刀触点、n个掷触点和刀臂,所述刀臂被配置为将所述刀触点选择性地电联接到所述n个掷触点中的零个或更多个掷触点。所述n个掷触点中的一个掷触点可以是所述一对n开关的第一位置处的第一掷触点,并且所述n个掷触点中的一个掷触点可以是所述一对n开关的最终位置的最终掷触点。所述差分时间延迟移位器还可以包括一个或更多个传输线,所述一个或更多个传输线中的各个传输线电连接在所述n个掷触点中的两个掷触点之间。所述差分时间延迟移位器还可
以包括源,所述源被配置为生成电磁(em)信号。所述源可以电联接到所述刀触点,以将所述em信号传送到所述刀触点。所述差分时间延迟移位器还可以包括一个或更多个负载,所述一个或更多个负载中的第一负载电联接到所述第一掷触点。
8.在一个实施方式中,所述一个或更多个负载中的第二负载可以电联接到所述最终掷触点。所述一对n开关的开关位置可以使得:(i)所述em信号通过所述一个或更多个传输线中的m个传输线被传播到所述第一负载,以及(ii)所述em信号通过所述一个或更多个传输线中的n-m个传输线被传播到所述第二负载,m是大于或等于0的整数。所述m个传输线可以与所述n-m个传输线不同。所述刀臂可以被配置为一次仅将所述刀触点选择性地电联接到所述n个掷触点中的一个掷触点。所述刀臂可以被配置为同时将所述刀触点选择性地电联接到所述n个掷触点中的两个或更多个掷触点。所述刀臂可以被配置为(i)不将所述刀触点选择性地电联接到所述n个掷触点,(ii)一次仅将所述刀触点选择性地电联接到所述n个掷触点中的一个掷触点,或(iii)同时将所述刀触点选择性地电联接到所述n个掷触点中的两个或更多个掷触点。
9.所述差分时间延迟移位器还可以包括一个或更多个匹配组件,所述一个或更多个匹配组件被配置为将所述开关、所述负载、所述源以及所述一个或更多个传输线中的一者的阻抗与所述开关、所述负载、所述源以及所述一个或更多个传输线中的另一者的阻抗匹配。
10.在另一方面,一种对电磁(em)信号施加时间延迟的方法可以包括:对一对n开关进行配置,其中,n是大于1的整数,以使所述一对n开关具有:(i)刀触点;(ii)n个掷触点;(iii)刀臂,所述刀臂被配置为将所述刀触点选择性地电联接到所述n个掷触点中的一个掷触点,所述n个掷触点中的一个掷触点是所述一对n开关的第一位置的第一掷触点,并且所述n个掷触点中的一个掷触点是所述一对n开关的最终位置的最终掷触点;以及(iv)一个或更多个传输线,所述一个或更多个传输线中的各个传输线电连接在所述n个掷触点中的两个掷触点之间。所述方法还可以包括:将被配置为产生所述电磁(em)信号的源电联接到所述刀触点;将第一负载电联接到所述第一掷触点,以及操纵所述刀臂将所述刀触点电联接到所述n个掷触点中的一个掷触点。
11.所述方法还可以包括将第二负载电联接到所述最终掷触点。所述方法还可以包括:使所述em信号通过所述一个或更多个传输线中的m个传输线传播到所述第一负载,并使所述em信号通过所述一个或更多个传输线中的n-m个传输线传播到所述第二负载,m是大于或等于0的整数。所述方法还可以包括:一次仅将所述刀触点选择性地电联接到所述n个掷触点中的一个掷触点。所述方法还可以包括:同时将所述刀触点选择性地电联接到所述n个掷触点中的两个或更多个掷触点。所述方法可以另选地包括:(i)不将所述刀触点选择性地电联接到所述n个掷触点,(ii)一次仅将所述刀触点选择性地电联接到所述n个掷触点中的一个掷触点,或(iii)同时将所述刀触点选择性地电联接到所述n个掷触点中的两个或更多个掷触点。
12.在又一方面,一种天线阵列馈电系统可以包括:具有至少一列辐射元件的天线阵列;以及至少一个延迟移位网络,所述至少一个延迟移位网络被配置为将电磁(em)信号分配到所述天线阵列。所述至少一个延迟移位网络可以包括至少一个一对n开关以及一个或更多个传输线,所述一个或更多个传输线中的各个传输线电连接在所述一对n开关的n个掷
触点中的两个掷触点之间。所述天线阵列的所述辐射元件中的各个辐射元件可以电联接到所述至少一个一对n开关的掷触点,使得各个辐射元件设置在所述一个或更多个传输线的端点处。
13.在一个实施方式中,所述1对n开关可以被配置为一次仅将所述em信号选择性地电联接到所述n个掷触点中的一个掷触点。所述一对n开关可以被配置为同时将所述em信号选择性地电联接到所述n个掷触点中的两个或更多个掷触点。所述一对n开关可以被配置为:(i)不将所述em信号选择性地电联接到所述n个掷触点,(ii)一次仅将所述em信号选择性地电联接到所述n个掷触点中的一个掷触点,或(iii)同时将所述em信号选择性地电联接到所述n个掷触点中的两个或更多个掷触点。
14.所述天线阵列可以包括至少两列辐射元件。所述至少一个延迟移位网络可以被配置为将所述em信号分配到所述至少两列辐射元件,使得每一列元件经历相同的差分延迟模式。所述天线阵列可以包括至少两列辐射元件。所述至少一个延迟移位网络可以被配置为将所述em信号分配到所述至少两列辐射元件,使得每一列元件经历不同的差分延迟模式。
附图说明
15.专利或申请文件包括至少一幅彩色绘图。专利局将在请求和支付必要费用后提供本专利或专利申请公开文本的彩色附图副本。
16.如附图中所示,从下面对示例实施方式的更具体的描述中,前述内容将变得显而易见,其中相同的附图标记在不同视图中指代相同的部分。附图不一定按比例绘制,而是将重点放在例示实施方式上。
17.图1示出了相控阵列天线系统的现有技术示例。
18.图2示出了可变移相器的现有技术示例。
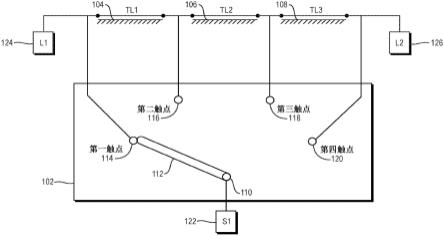
19.图3示出了根据本发明的差分延迟移位器的示例实施方式。
20.图4例示了根据本发明的差分延迟移位器的示例仿真模型。
21.图5a和图5b例示了与图4所示的仿真模型相关联的仿真结果。
22.图6a和图6b例示了根据本发明的差分延迟移位器的另选实施方式。
23.图7示出了可以用于控制多元件阵列的两个轴线的延迟移位的示例级联网络。
具体实施方式
24.下面是示例实施方式的描述。
25.所描述的实施方式针对可以提供从电磁(em)信号源到负载的离散时间延迟路径的差分真实时间延迟移位器。
26.图3示出了根据本发明的差分延迟移位器的示例实施方式,其包括单刀四掷开关102、第一传输线104、第二传输线106和第三传输线108。开关102可以包括电联接到刀臂112的刀110,刀臂112被配置为将刀112选择性地(电)联接到第一触点114、第二触点116、第三触点118和第四触点120中的一者。第一传输线104(tl1)电联接在第一触点114与第二触点116之间。第二传输线106电联接在第二触点116与第三触点118之间。第三传输线108电联接在第三触点118与第四触点120之间。源122(s1)电联接到刀110,第一负载(l1)124电联接到第一触点114,并且第二负载(l2)126电联接到第四触点120。
27.当开关102将刀110电联接到第一触点114时,存在如下传输路径:(i)从源122直接到第一负载124,以及(ii)从源122通过传输线tl1 104、tl2 106和tl3 108到第二负载126。
28.当开关102将刀110电联接到第二触点116时,存在如下传输路径:(i)从源122通过传输线tl1 104到第一负载124,以及(ii)从源122通过传输线tl2 106和tl3108到第二负载126。
29.当开关102将刀110电联接到第三触点116时,存在如下传输路径:(i)从源122通过传输线tl1 104和tl2 106到第一负载124,以及(ii)从源122通过传输线tl3108到第二负载126。
30.当开关102将刀110电联接到第四触点120时,存在如下传输路径:(i)从源122通过传输线tl1 104、tl2 106和tl3 108到第一负载124,以及(ii)从源122直接到第二负载126。
31.通过将开关102设定为上述四种状态之一,从源122到第一负载124的传输路径可以被构造为tl1、tl1+tl2或tl1+tl2+tl3,并且从源122到第二负载126的传输路径可以被构造为tl3、tl2+tl3或tl1+tl2+tl3。各个传输线tl1 104、tl2 106和tl3 108实现通过传输线传播的信号的时间延迟。延迟等于传输线的长度除以信号通过传输线的传播速度。传播信号的最终相位延迟取决于信号的频率(波长)。例如,假设传播速度为c=3
×
108,则24mm(0.024m)的传输线产生0.024m/(3
×
108m/s)=80ps的时间延迟。对于波长为0.5ns的2ghz传播信号,80ps的时间延迟对应于大约58度的相位延迟。因此,由开关选定的传输路径的特定集合产生的时间延迟会产生对应的相位延迟。开关102可以以第五状态为特征,其中,将刀不电联接到掷触点,并且刀与掷触点电隔离。
32.上面的示例是为了描述本发明的概念而提出的,而不是限制性的。本发明的实施方式可以利用任何数量的掷(例如,单刀n掷开关,其中n是整数)。开关的掷触点之间的传输线(例如,tl1、tl2、tl3)可以具有任何长度且不一定相等。可以适当地选择传输线的长度以实现特定开关设定的期望传播延迟。差分延迟移位器中可以包括附加的传输线区段(匹配区段),以提供(i)传输线之间、(ii)从开关102到传输线、(iii)从源到开关以及(iv)从传输线到负载的阻抗匹配。匹配区段可以增加从源122到负载124、126的传输路径的长度,如上所述,这对应于负载处的相位延迟的增加。
33.参考上面关于图3描述的示例实施方式,假设tl1的长度=tl2的长度=tl3的长度=24mm,并且s1驱动的信号频率范围为0至4ghz。当开关112将刀110连接到第一触点114时,s1 122和l1 124处的信号之间的时间延迟差将为0ps,而s1 122和l2 126处的信号之间的时间差将约为240ps。当开关102将刀110连接到第二触点114时,s1 122和l1 124处的信号之间的时间差将约为80ps,而s1 122和l2 126处的信号之间的时间差将约为160ps。当开关102将刀110连接到第三触点116时,s1 122和l1 124处的信号之间的时间差将约为160ps,而s1 122和l2 126处的信号之间的时间差将约为80ps。当开关102将刀110连接到第四触点118时,s1 122和l1 124处的信号之间的时间差将约为240ps,而s1 122和l2 126处的信号之间的时间差将约为0ps。上面描述的示例实现的实施方式被总结在表1中。
34.开关位置l1处的时间延迟(关于s1)l2处的时间延迟(关于s1)第一触点0ps240ps第二触点80ps160ps第三触点160ps80ps
第四触点240 ps0ps
35.表1
36.图4例示了差分延迟移位器的示例仿真模型,该差分延迟移位器包括将信号从源p3 222分配到第一负载p1 224和第二负载p2 226的1刀4掷开关202。虽然第一负载224和第二负载226在该示例实施方式中被描绘为100ohm阻抗负载,并且源222被描绘为50ohm阻抗负载,但这些特定值仅是示例并且不旨在限制。该示例仿真模型中的开关202是menlo microsystems公司的mm5130开关,其特征是单刀4掷开关设施。第一传输线204包括12mm、100ohm的传输线(线8)和两个匹配区段(线9和线3),各个匹配区段具有z=zm的阻抗(匹配阻抗)和l m的长度(匹配长度)。第二传输线206包括12mm、100ohm的传输线(线5)和两个匹配区段(线1和线2)。第三传输线208包括12mm、100ohm的传输线(线7)和两个匹配区段(线4和线11)。匹配区段230将第一负载224与第一区段204和开关202匹配。匹配区段232将第二负载226与第三区段208和开关202匹配。匹配区段234将源222与开关202匹配。
37.图5a和图5b例示了与图4所示的仿真模型相关联的仿真结果。图5a示出了源222与第一负载224之间的传输损耗502(db(s[2,3]))以及源222与第二负载226之间的传输损耗504(db(s[3,1])),显示接近均匀分布(3db)的功率。图5b示出了对于4个开关位置506、508、510和512中的每一个开关位置,作为频率的函数的第一负载224与第二负载226之间的时间延迟差。
[0038]
所描述的实施方式针对关于图2描述的滑片臂移相器的离散或量化版本。然而,所描述的实施方式在高频(例如,大于1ghz)处提供了显著改进的性能。
[0039]
较小的开关(例如,在图3和图4所示的示例实施方式中使用的1刀4掷开关)可以被组合以形成更大的开关,如图6a和图6b的示例实施方式所示,尽管可以另选地使用具有更多数量的掷触点(例如,8个、16个或32个掷触点)的单个开关器件。图6a示出了两个1刀4掷开关被组合以有效地形成1刀8掷开关,该1刀8掷开关对应地具有更多数量的传输线,这增加了可以选择的相位延迟的数量。类似地,图6b示出了四个1刀4掷开关被组合以有效地形成1刀16掷开关。诸如图6a和图6b的示例实施方式中所示的配置要求各个个体开关能够处于第五“无接触”状态,该第五“无接触”状态将刀触点与任何掷触点隔离,以便在任何给定时间只有一个开关处于活动状态并将其刀触点电连接到掷触点。
[0040]
虽然如上所述的一些实施方式可以提供在给定时间只有一个开关处于活动状态,但另选实施方式可以利用在给定时间闭合(closing)超过一个开关(这可能产生在只有一个开关处于活动状态时附加相位状态不可用)的系统益处。类似地,没有开关处于活动状态的配置可能会断开天线元件,从而产生当至少一个元件连接到发射源时不可用的新天线模式。
[0041]
虽然本文描述的移相器的离散(即,量化)版本可以用于实现如上所述的超过一个开关激活,但实际的滑片臂移相器不能促进类似状态。换句话说,现有技术的滑片臂移相器一次只能实现一个滑片位置,这对应于所描述的离散移相器实施方式的一个开关激活。机械式滑片臂移相器不能同时接触延迟线上的两个点。因此,在现有技术中没有、也不能考虑实现离散移相器的超过一个的开关。
[0042]
由于闭合两个开关路径同时将传输线的相邻节点连接在一起,因此这些节点之间的传输线区段成为电路中的寄生元件。这可以被认为是开路短截线,其长度为相邻节点之
间环路的一半,并且阻抗为zo/2,其中zo是贯穿传输线的阻抗。只要延迟环路的长度约为四分之一波长或更小(对应于90度的相位步长),则开路短截线的寄生效应就可以很容易地被调出。对于大于90度的相位步长,该技术的有效性会受到影响。实际上,这不是一个明显的限制,因为相位步长通常小于90度。
[0043]
如本文所述的差分延迟移位网络不限于在天线元件阵列的单个轴线上提供调整或波束控制。如图7的示例实施方式所示,延迟移位的级联网络可以用于控制多元件阵列702的两个轴线,该多元件阵列702具有两列,每列四个元件。在该实施方式中,方位角和仰角都被调整。第一延迟移位网络704允许控制馈送个体元件列的相对信号延迟,从而提供方位角波束控制。在每一列内,由rf信号705驱动的附加延迟移位网络提供仰角波束控制。来自第一延迟移位网络704的第一输出rf信号707a被提供给第一联接器742,该第一联接器742分离第一输出rf信号707a并且将该信号的版本分配到第一外部仰角延迟移位网络706和第一内部仰角延迟移位网络708。来自第一延迟移位网络704的第二输出rf信号707a被提供给第二联接器744,该第二联接器744分离第二输出rf信号707b并将该信号的版本分配到第二外部仰角延迟移位网络712和第二内部仰角延迟移位网络710。
[0044]
在每列中具有四个辐射元件的示例实施方式中,每列包括两个外部元件(例如,第一列中的元件720和元件728,以及第二列中的元件730和元件738),以及两个内部元件(例如,第一列中的元件722和元件724,以及第二列中的元件732和元件734)。第一外部仰角延迟移位网络706驱动第一列中的两个外部仰角元件720、728,并且第二外部仰角延迟移位网络712驱动第二列中的两个外部仰角元件730、738。类似地,第一内部仰角延迟移位网络708驱动第一列中的两个内部仰角元件722、724,并且第二内部仰角延迟移位网络710驱动第二列中的两个外部仰角元件732、734。
[0045]
通常,个体列将被控制以经历相同的差分延迟,但是可以通过个体地(individually)调整延迟移位器,根据所需的辐射模式将列设定为不同的仰角。
[0046]
本发明的示例实施方式可以利用具有低寄生全串联开关元件的微机电系统(mems)开关(例如,本文所述的mm5130开关)来实现开关102。这种mems开关使电路的实现比使用更常规的结合了分流电路元件的固态开关简单得多。尽管使用mems开关可以提供某些优点,但这种基于mems开关的架构的示例使用并不旨在进行限制。
[0047]
本文所述的差分延迟移位器的基于开关的实施方式未在现有技术中描述,因为部署的天线装置通常作为频分双工(fdd)操作。fdd系统可以同时发送和接收信号,因此必须减轻非线性以控制无源互调(pim)。由于欧姆开关触点可能产生显著的非线性,并因此产生不可接受的高pim值,因此基于开关的移相器传统上已使用如本文所述的电容联接滑块来实现。因此,基于开关的移相器架构因为它们的非线性和与fdd系统的不兼容性而不被考虑用于天线装置。
[0048]
因为新兴的蜂窝架构(例如,5g系统)可以利用时分双工(tdd)通信(tdd通信不会同时发送和接收em信号),所以本文描述的基于开关的差分延迟移位器实施方式可能对天线下倾应用具有重要用途。
[0049]
虽然已经具体示出和描述了示例实施方式,但是本领域技术人员将理解,在不脱离所附权利要求所涵盖的实施方式的范围的情况下,可以在所述示例实施方式中进行形式和细节的各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1