基于概率模型的毫米波波束跟踪方法
1.本发明属于通信技术领域,具体涉及一种基于概率模型的毫米波波束跟踪方法。
背景技术:
2.如今移动通信系统的工作频率为300mhz~6ghz,该频段通常被认为是无线通信的最佳频段,能够制造较为有利的传播条件。随着用户数量的增加以及数据业务的多样化,6ghz以下频段的业务量趋于过载,难以满足日益增加的通信速率需求,而6ghz以上频段(超高频、甚高频)尚未得到充分使用,因此极具开发潜力
[1
‑
2]
。当工作频率为6~300ghz时,载波波长通常在毫米波甚至以下,这种传输方式称为毫米波传输。由于具有高数据速率和丰富的频谱资源,目前毫米波通信被认为是未来5g(the fifth generation mobile communication technology)发展的关键技术之一。
[0003]
毫米波在自由空间中传播时路径损耗较大,穿透力不及当前无线通信系统所使用的低频段电磁波,导致在毫米波传输系统中,存在的传播路径主要为视距(line of sight,los)径,而非视距(non line of sight,nlos)径,由于经过了障碍物的反射与折射等作用,能量严重损失。然而当大规模mimo系统采用毫米波传输时,由于天线阵列阵元之间的间距为载波波长量级,而毫米波的波长较小,因此可以在相同空间范围内容纳数目庞大的天线单元,并且大规模天线阵列通过形成强指向性波束,能够产生巨大的阵列增益,以弥补毫米波在空间传输时严重的路径损耗。
[0004]
到目前为止,许多关于毫米波信道的研究都是基于静态非时变信道进行的,并没有将用户移动产生的多普勒频移对系统的影响考虑进去。当用户快速移动时,由于信道相干时间与载波频率呈线性关系,因此毫米波信道的变化速度会比目前的蜂窝系统快得多。这表明时变毫米波信道的状态信息需要频繁更新,因此会产生大量的导频开销,造成频谱利用率的降低。通常对于移动态下的毫米波信道来说,最新技术的工作重点是两种类型的波束成形技术,称为波束训练和波束跟踪。这两种技术拥有一个共同的核心,即只需获取收发端之间最强信号的角度方向,而无需显示的信道估计。波束训练可以将波束从当前的模式切换到更佳的波束模式,且复杂度较低。波束跟踪可以调节波束方向,跟踪特定的传播路径,具有高容量和充分的灵活性。为了确保移动过程中的高数据速率通信,通常采用波束跟踪的方式进行方法研究。
技术实现要素:
[0005]
本发明主要目的在于设计一种波束跟踪算法以此来降低毫米波通信系统中产生的导频开销和由于反复使用波束训练所带来的算法复杂度。本发明提出了一种利用信道在连续时刻的相关性,并以此采用概率模型对波束进行跟踪的算法模型。
[0006]
本发明的技术方案是,基于概率模型的毫米波波束跟踪方法,用于毫米波通信系统,其特征在于,包括以下步骤:
[0007]
s1、用户端获取最佳编码与初始码本:
[0008]
设m时刻基站端导频符号为l
bs
表示基站端射频链个数,用户端的接收信号为:
[0009][0010]
其中,w
k,m
表示第k个用户m时刻接收端编码矩阵,h
k
[m]表示第k个用户在m时刻的信道矢量,f
m
表示基站端编码矩阵,h表示矩阵求共轭转置;
[0011]
以满足用户端的最大接收功率为目的获得最佳编码:
[0012][0013]
其中,maxp
k
表示第k个用户接收功率的最大值,则的主特征向量即为最佳的w
k,m
;
[0014]
通过码本计算公式获得初始码本:
[0015]
a
ue
=[a
ue
(θ1),
…
,a
ue
(θ
gue
)]
[0016][0017]
θ
gue
∈γ
ue
,g
ue
=1,2,
…
,g
ue
[0018]
其中,g
ue
为用户端的量化格点数,用户端的初始角度范围为[θ
min
,θ
max
],a
ue
(θ
gue
)表示用户端角度θ
gue
所对应的天线阵列矢量,γ为集合符号;
[0019]
s2、用户端与基站端通过波束训练获得精确角度信息:
[0020]
根据获得的最佳编码和初始码本,计算最佳编码与码本中的每一项的内积,即并找出σ中的最大项所对应的码本项以及该码本项所对应的角度和下标
[0021]
在完成了当前时刻用户端的波束训练操作之后,根据选出的码本项作为下一时刻上行链路的预编码向基站发送导频信号,令用户发送的导频符号为s
m+1
=1,则基站端在未进行组合编码操作前收到的信号为
[0022][0023]
其中,表示基站端第k个用户在m时刻角度所对应的天线阵列矢量,α
k,1
表示第k条径的复增益,n为高斯噪声;
[0024]
采用格点匹配的波束训练方式,将每一个用户的角度信息迭代出来,令用户端角度量化的格点数为g
bs
,基站端每个用户的初始角度范围为根据码本公式计算基站端的初始码本a
bs
,以同样的方法用于基站端波束训练;
[0025]
基于上述方法,通过基站和用户两端反复发送导频信号进行训练,直至收敛,获得精确的角度信息;
[0026]
s3、采用马尔可夫随机过程来模拟aoas/aods的时间动态特性,实现波束跟踪:
[0027]
当获取到精确的角度信息后,通过公式:
[0028][0029]
运用梯度下降法来获得最佳实时角度,其中,为偏导符号,σ2为噪声功率,θ=y
k
[m]
‑
a
ue
(θ
k,m
)x
k,m
,,且对有a
d
(n
d
)=n
d
‑
1,n
ue
表示用户端接收天线数量,符号代表hadamard乘积。
[0030]
本发明的有益效果是:
[0031]
1)利用毫米波信道矩阵的特征,对信道矩阵进行分解获得los径的波束信息,并在此基础上,结合概率模型和梯度下降法对多用户信道的角度信息进行跟踪,相对于传统的跟踪算法,会获得更优的性能。
[0032]
2)本方法经过仿真测试最多4次迭代即可收敛,获得较准确信息,由此造成的导频开销较小,可以在极短的时间内建立稳定且高效的链路,对于快时变场景中的波束训练非常关键。
[0033]
3)本发明所提方法是无码本的,采用梯度下降法可以较好地逼近真实角度值,相较于其他基于角度网格的算法,本发明所得角度量化精度高,因此本发明所提方法性能优于其他波束跟踪方法。
附图说明
[0034]
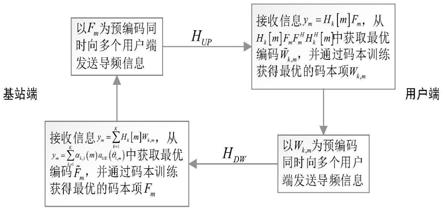
图1为本发明波束训练迭代构成图
[0035]
图2为波束跟踪算法性能随snr变化曲线图
[0036]
图3为本发明所提跟踪方法对用户端时变角度的跟踪情况
具体实施方式
[0037]
下面结合附图,详细描述本发明的技术方案。
[0038]
本发明的方案,首先由用户端信息获得最佳编码,即通过用户端接收功率
[0039][0040]
来获得最佳编码,令矩阵求得该矩阵主特征向量,该特征向量即为最佳编码。具体是:
[0041]
下行信道,忽略噪声影响,m时刻基站端导频符号经
过预编码,信道,组合编码后在用户端的接收信号为
[0042][0043]
其中l
bs
表示基站端射频链个数,w
k,m
表示第k个用户m时刻收端编码矩阵,h
k
[m]表示第k个用户在m时刻的信道矢量,f
m
表示基站端编码矩阵,h表示矩阵求共轭转置。
[0044]
问题转化为寻找最优的w
k,m
满足用户端的最大接收功率
[0045][0046]
其中,maxp
k
表示第k个用户接收功率的最大值,
[0047]
则的主特征向量即为最佳的w
k,m
。
[0048]
通过码本计算公式获得初始码本:
[0049]
a
ue
=[a
ue
(θ1),
…
,a
ue
(θ
gue
)]
[0050][0051]
θ
gue
∈γ
ue
,g
ue
=1,2,
…
,g
ue
[0052]
其中,g
ue
为用户端的量化格点数,用户端的初始角度范围为[θ
min
,θ
max
],a
ue
(θ
gue
)表示用户端角度θ
gue
所对应的天线阵列矢量,γ为集合符号。
[0053]
获得最佳编码和初始码本后,用户端与基站端通过波束训练获得精确角度信息。如图1所示,本发明采用了一种改进波束训练方法来获得信道los径的最优波束角度,具体包括:
[0054]
用户端
[0055]
s1、初始化:令和表示当前用户的初始角度范围,并根据码本计算公式计算出初始的码本然后令迭代系数i=1,作为波束训练的起点,最后假设初始的角度为和误差门限ε0作为后续循环的跳出条件。
[0056]
s2、计算最佳编码与码本中的每一项的内积,即并找出σ中的最大项所对应的码本项以及该码本项所对应的角度和下标计算如果
△
θ<ε0,则将作为下一次上行信道的预编码,将作为当前用户的aoa,然后跳出循环。否则,进入步骤3。
[0057]
s3、根据择选出的角度,进一步增加量化精度,重新计算码本所对应的角度范围和其中η为迭代步长。计算出新的训练码本然后令i=i+1重新进入下一次循环操作。
[0058]
基站端
[0059]
s1、初始化令系统残差γ=y[m+1],角度误差门限为ε0,并令k=1作为外围循环迭代参数,表示当前训练的用户。
[0060]
s2、本步为外围循环,用于获取每个用户的波束信息。令和
表示当前用户的初始角度范围,令初始码本i=1为内层循环迭代参数,令当前用户的初始角度为为内层循环的跳出条件。
[0061]
s3、本步为内层循环,用于迭代获取当前用户的波束信息。迭代步骤如下:
[0062]
1)计算残差与码本中每一项的内积,即并找出σ中最大项所对应的码本项以及该项所对应的角度和下标计算如果则进入步骤4。
[0063]
2)为了提高量化精度,重新计算码本所对应的角度范围和并根据公式(4
‑
5)计算出下一次迭代的训练码本然后令i=i+1进入下一次循环操作。
[0064]
s4、将作为下一次下行信道的预编码,作为基站端对应当前用户的aoa,计算择选出的码本在接收信号上的投影,即并更新系统残差然后令k=k+1,如果k>k,跳出外层循环,结束本次训练过程,否则进入下一次外层循环。
[0065]
用上述波束训练算法获取角度信息需要基站和用户两端反复发送导频信号进行训练,直至算法收敛,获得精确的角度信息。
[0066]
当获取到最佳角度值后,采用马尔可夫随机过程来模拟aoas/aods的时间动态特性。在该模型中当前波束角度值φ
k,l,m
的分布仅依赖于前一时刻φ
k,l,m
‑1的状态而与上一时刻之前的时刻无关,即φ
k,l,m
的分布满足
[0067][0068]
其中,pr表示马尔科夫概率,n表示高斯分布,为信道中高斯分布的均方误差。参数的大小表示用户相对于基站的移动程度,越大用户的移动性越强。
[0069]
m时刻用户k在未经组合编码处理时的接收信号为
[0070]
y
k
[m]=h
k
[m]f
m
s
m
+n
[0071]
其中,n~cn(0,2σ2i)为均匀独立分布的高斯白噪声矢量,导频符号s
m
与波束训练阶段一致。转化为寻找的最大化问题,即
[0072][0073]
在上式中为最佳角度的先验概率,得到以下计算公式
[0074][0075]
其中为常数,为角度均值。
[0076]
为测量目标函数,进一步获得计算公式
[0077][0078]
其中,其中,为常数,|| ||
f
为矩阵f范数。
[0079]
最后得到下式
[0080][0081]
其中,为偏导符号,θ=y
k
[m]
‑
a
ue
(θ
k,m
)x
k,m
,且对有a
d
(n
d
)=n
d
‑
1,n
ue
表示用户端接收天线数量,符号代表hadamard乘积。
[0082]
如图2所示,为波束跟踪算法性能随snr变化曲线图,其中algorithm1为j.palacios,d.donno,和j.widmer在文章“tracking mm
‑
wave channel dynamics:fast beam training strategies under mobility”中所提出的波束跟踪算法。algorithm2为z.xiao,p.xia和x.g.xia在文章“new beam tracking technique for millimeter wave
‑
band communications”中所提出的一种波束跟踪算法。
[0083]
如图3所示,为本发明所提跟踪方法对用户端时变角度的跟踪情况,其中algorithm1为j.palacios,d.donno,和j.widmer在文章“tracking mm
‑
wave channel dynamics:fast beam training strategies under mobility”中所提出的波束跟踪算法。algorithm2为z.xiao,p.xia和x.g.xia在文章“new beam tracking technique for millimeter wave
‑
band communications”中所提出的一种波束跟踪算法。
[0084]
综上所述,本发明主要运用了信道角度变化连续特性,构建了一种基于马尔可夫概率模型的毫米波波束训练与波束跟踪方法,由于在该模型下当前时刻波束角度值φ
k,l,m
只与上一时刻波束角度值φ
k,l,m
‑1的状态有关,因此该方法可用于在快时变信道下以较低的导频开销获得波束最佳角度,提升波束训练与波束跟踪算法性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1