一种针对网络化伺服电机的传感器攻击估计方法
1.本发明属于网络安全技术领域,具体提供一种针对网络化伺服电机的传感器攻击估计方法,以事件触发的方式,设计搜索机制,寻找定位受到攻击的传感器,避免其影响状态估计性能,同时对攻击信号进行估计。
背景技术:
2.随着计算机网络和通信技术的迅速发展,网络化伺服电机的应用逐渐成为研究的热点,其广泛应用于工业现场中常见的雕刻机、裁割机以及3d打印机等。网络化伺服电机主要标志是在控制系统中引入计算机网络,将相关的信号和数据通过通信网络进行传输和交换,从而实现资源共享和远程操作。针对网络化伺服电机,其通常根据所装备的传感器采集的数据来对位置及转速状态进行估计,进而对系统的运行状态进行精准地控制。但由于工业网络安全等级较低,数据在传输的过程中可能会遭到来自外部攻击者的破坏,进而影响到系统的控制性能。如果没有正确的防护手段,信息化系统会遭到未授权访问与攻击,尤其是对一些大型工业控制系统的攻击,给国家基础设施,经济发展与社会稳定产生了较大威胁。
3.网络化伺服电机的安全问题也受到了广泛关注。目前,已经有许多学者对传感器攻击估计问题进行了研究。大多数传感器攻击估计方法都是基于鲁棒观测器、滑模观测器等。滑模观测器对参数准确性的依赖很强,还需要已知攻击信号上界等信息,但实际中关于攻击的有效信息难以获取。鲁棒观测器的估计误差上界未知,因此无法保证估计的准确性。更值得一提的是,现有的大多数传感器攻击估计观测器都需要求解线性矩阵不等式(lmi)方程以获得观测器增益,这种方法具有很大的局限性,在实际应用的过程中,通常难以求得合适的解。另一方面,攻击信号与故障和扰动不同,攻击信号的频率和幅值完全由攻击者决定,传统的观测器在面对变化率较大的攻击信号时,往往无法保证其过渡性能。因此,设计具有较高可行性和良好过渡性能的传感器攻击估计方法仍然是一个具有挑战性的问题。
技术实现要素:
4.为了克服现有技术的不足,本发明提供了一种具有较高可行性和良好过渡性能的针对网络化伺服电机的传感器攻击估计方法,具体地说,对含有稀疏性传感器攻击的输出信号进行重构,同时估计系统的状态和攻击,并确保估计误差收敛至预定的极小能量界内。
5.本发明为解决上述技术问题提供了如下技术方案:
6.一种针对网络化伺服电机的传感器攻击估计方法,包括以下步骤:
7.步骤1)建立网络化伺服电机状态空间方程并离散化,过程如下:
8.1.1)考虑系统中存在传感器攻击的情况,建立采样周期t的离散时变线性随机控制系统,如式(1)所示:
9.10.其中a为系统的状态矩阵,b为输入矩阵,c为输出矩阵,x表示系统状态量,u为系统输入,y为系统输出,a表示传感器攻击,v表示传感器测量噪声,ω表示过程噪声;
11.1.2)假设ω(t)和v
i
(t)是零均值高斯白噪声,满足如下方程:
[0012][0013]
其中q
ω
(t)表示过程噪声的协方差和表示第i个传感器测量噪声的协方差。
[0014]
δ
tk
表示kronecker三角函数,
[0015]
步骤2),计算每一个传感器在可能受到攻击情况下的局部最优估计,过程如下:
[0016]
2.1)定义1:对于每一个同时满足|s|=s(s≤l),且(a,c
s
)是可以观测的,则系统为s稀疏可观测系统;
[0017]
根据定义1,得到假设:与(a(t),c
i
(t))相关的动力学系统是2s稀疏可观测系统;
[0018]
2.2)基于步骤2.1的假设以及a
i
(t)是s稀疏向量,对于每一个传感器,定义攻击模式:
[0019]
其中表示第i个传感器的第ξ种攻击模式;
[0020]
同时,用a
i
(t)=0表示无攻击模式d0;
[0021]
定义切换矩阵用于判断处于何种攻击模式下:
[0022]
当m
j
(ξ
i
)=0;当
[0023]
2.3)计算局部最优估计
[0024]
根据第i个传感器的测量输出{y1(t),y2(t),y3(t),...,y
i
(t)}和开关函数矩阵的定义以及式(2)得到,在可能收到攻击情况下,线性最小方差的局部最优kalman估计
[0025][0026]
其中,上标"t"表示矩阵的转置,p
ii
(t|t
‑
1)表示先验估计误差协方差矩阵;
[0027][0028]
其中k
i
(t)表示增益矩阵;
[0029]
p
ii
(t|t)=[i
n
‑
m
ξi
(t,k)c
i
(t)k
i
(t)]p
ii
(t|t
‑
1)
ꢀꢀ
(5)
[0030]
其中表示局部最优估计误差协方差矩阵,i
n
表示n维单位矩阵;
[0031]
最后,得到每一个传感器的局部最优估计:
[0032][0033]
步骤3),基于局部最优估计,构造最优(即线性最小方差)融合kalman滤波器并对攻击向量进行重构。
[0034]
进一步,所述步骤3)的过程如下:
[0035]
3.1)将正态分布函数下最大似然融合准则的结果,作为线性最小方差意义下矩阵加权的最优信息融合准则,得出:
[0036][0037]
其中,f
i
(t)为最优加权矩阵;
[0038]
3.2)构造最优加权矩阵如式(8)所示:
[0039][0040]
其中,p
ij
(t|t)为最优估计误差交叉协方差矩阵,如式(9)所示:
[0041][0042]
3.3)为了实现对传感器攻击的检测,引入功能评估函数v
i
(t,k):
[0043][0044]
其中,||
·
||2表示
·
的二范数;
[0045]
3.4)设置切换函数ξ
i
(t,k)表示处于第k种攻击模式
[0046]
其中ξ
i
(t,0)代表无攻击模式,ρ是决定开关机制是否触发的阈值,pb=pr{v
i
(t,k)>ρ},pb是概率大小;
[0047]
a)若v
i
(t,k)>ρ,且pb>α,α是人为设置的正实数,α∈[0,1],则ξ
i
(t,k+1)=ξ
i
(t,k)+1,切换到下一个攻击模式;
[0048]
b)若v
i
(t,k)>ρ,且pb<α,α是人为设置的正实数,α∈[0,1],则认为属于误报,不进行攻击模式的切换;
[0049]
3.5)在执行完切换搜索机制后,对攻击向量进行重建:
[0050][0051]
其中权重矩阵u
i
是一个对角矩阵,测量噪声v
i
项的方差倒数。
[0052]
本发明是一种针对网络化伺服电机的传感器攻击估计方法,以事件触发的方式,设计搜索机制,寻找定位受到攻击的传感器,避免其影响状态估计性能,同时对攻击信号进行估计。
[0053]
本发明的有益效果为:采用事件驱动技术,可以节约计算资源,提高系统计算性能;设置强制搜索机制,强制搜索过程被限制在一个时间瞬间,优点是攻击案例的瞬态时间最小;该方法的辨识精度可以满足实际应用的要求,并且所需的相关参数可以通过低成本传感器测得。
附图说明
[0054]
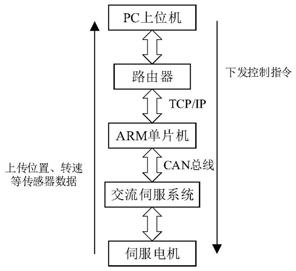
图1是网络化伺服电机实验平台示意图;
[0055]
图2是对伺服电机的位置状态x1估计效果;
[0056]
图3是对伺服电机的速度状态x2估计效果;
[0057]
图4是融合状态估计效果;
[0058]
图5是对伺服电机位置传感器攻击a1的估计效果;
[0059]
图6是对伺服电机速度传感器攻击a2的估计效果;
[0060]
图7是对攻击模式ξ
i
(t,k)的统计;
[0061]
图8是对性能评估函数v
i
(t,k)的统计。
具体实施方式
[0062]
为使本发明的目的、技术方案和有点更加清晰,下面结合附图和实际经验对本发明的技术方案作进一步描述。
[0063]
实验所使用的网络化伺服电机示意图如图1所示,主要由pc上位机,arm单片机,can总线以及交流伺服电机系统组成.pc上位机主要负责处理arm单片机上发的数据信息,通过本文的观测器算法进行相应的处理后将指令下发给arm单片机.arm单片机一面接收交流伺服系统经can总线传输而来的电机位置、转速、力矩等信息并将其封装后上传到pc机,一面将pc机发送的控制指令传输给交流伺服系统,使其跟随指令做出相应运动.交流伺服驱动器是台达公司asda
‑
a2系列伺服驱动器,额定功率400w,额定电压220v;电机是台达公司三相永磁同步电机,额定电压220v,转速最高达1500rpm,电机框架尺寸60mm.
[0064]
参照图2
‑
图8,一种针对网络化伺服电机的传感器攻击估计方法,先对网络化伺服电机进行建模,考虑系统中存在传感器攻击,确定其状态空间方程并对其离散化;构造含有传感器攻击的输出方程;构造最优融合kalman滤波器并对攻击进行重构。
[0065]
一种针对网络化伺服电机的传感器攻击估计方法,包括以下步骤:
[0066]
1)建立网络化伺服电机状态空间方程并离散化;
[0067]
2)计算每一个传感器在可能受到攻击情况下的局部最优估计;
[0068]
3)构造最优融合kalman滤波器并进行攻击估计。
[0069]
进一步,所述步骤1)中,建立网络化伺服电机状态空间方程并离散化,如式(1)所示:
[0070][0071]
其中,状态矩阵输入矩阵输出矩阵
分布矩阵x表示系统位置和转速状态,u为系统输入,y为系统输出,传感器攻击x表示系统位置和转速状态,u为系统输入,y为系统输出,传感器攻击
[0072]
1.2)ω(t)和v
i
(t)是零均值高斯白噪声,即概率密度函数服从正态分布且均值为的噪声,满足式(2):
[0073][0074]
在此例中,可取
[0075]
步骤2)计算每一个传感器在可能受到攻击情况下的局部最优估计,过程如下:
[0076]
2.1)根据定义1,l=2,得到假设:与(a(t),c
i
(t))相关的动力学系统是2s稀疏可观测系统。
[0077]
2.2)基于步骤2.1的假设以及a
i
(t)是s稀疏向量,对于每一个传感器,定义攻击模式:d={d0,d1,d2}
[0078]
其中s=2,表示第i个传感器的第ξ种(ξ=1,2)攻击模式;
[0079]
同时,用a
i
(t)=0表示无攻击模式d0;
[0080]
定义切换矩阵用于判断处于何种攻击模式下:
[0081]
{m0,m1,m2}={diag{1,1},diag{1,0},diag{0,1}}
[0082]
2.3)计算局部最优估计
[0083]
在可能收到攻击情况下,线性最小方差的局部最优kalman估计
[0084][0085]
其中,上标"t"表示矩阵的转置,p
ii
(t|t
‑
1)表示先验估计误差协方差矩阵;
[0086][0087]
其中k
i
(t)表示增益矩阵;
[0088]
p
ii
(t|t)=[i
n
‑
m
ξi
(t,k)c
i
(t)k
i
(t)]p
ii
(t|t
‑
1)
ꢀꢀ
(5)
[0089]
其中表示局部最优估计误差协方差矩阵,i
n
表示n维单位矩阵,此例中n=2;
[0090]
最后,得到每一个传感器的局部最优估计:
[0091]
[0092]
步骤3),基于局部最优估计,构造最优(即线性最小方差)融合kalman滤波器并对攻击向量进行重构,过程如下:
[0093]
3.1)将正态分布函数下最大似然融合准则的结果,作为线性最小方差意义下矩阵加权的最优信息融合准则,得出:
[0094][0095]
其中,f
i
(t)为最优加权矩阵;
[0096]
3.2)构造最优加权矩阵如式(8)所示:
[0097][0098]
其中,p
ij
(t|t)为最优估计误差交叉协方差矩阵,如式(9)所示:
[0099][0100]
3.3)为了实现对传感器攻击的检测,引入性能评估函数v
i
(t,k):
[0101][0102]
其中,||
·
||2表示
·
的二范数;
[0103]
3.4)设置切换函数ξ
i
(t,k)表示处于第k种攻击模式
[0104]
其中ξ
i
(t,0)代表无攻击模式,ρ是决定切换机制是否触发的阈值,pb=pr{v
i
(t,k)>ρ},pb为概率大小;
[0105]
a)ρ=0.25,α=0.1;若v
i
(t,k)>ρ,且pb>α,α是人为设置的正实数,α∈[0,1],则ξ
i
(t,k+1)=ξ
i
(t,k)+1,切换到下一个攻击模式;
[0106]
b)ρ=0.25,α=0.1;若v
i
(t,k)>ρ,且pb<α,α是人为设置的正实数,α∈[0,1],则认为属于误报,不进行攻击模式的切换;
[0107]
3.5)在执行完切换搜索机制后,对攻击向量进行重建:
[0108][0109]
其中权重矩阵u
i
是一个对角矩阵,测量噪声v
i
项的方差倒数。
[0110]
从实验结果可以看出,融合估计后的状态估计值比局部估计的状态估计值更加吻合实际,在有噪声干扰的情况下,也能做到精确的估计。这种分布式最优融合方法有效的提高了噪声存在下传感器状态的估计精度。同时对于受到攻击的传感器能启动搜索机制准确定位攻击通道,并对攻击信号也进行较为准确的估计。这种攻击估计方法在机器人巡逻以及无人机巡航等对抗环境下具有一定的应用价值。
[0111]
以上结合附图详细说明和陈述了本发明的实施方式,但并不局限于上述方式。在本领域的技术人员所具备的知识范围内,只要以本发明的构思为基础,还可以做出多种变
化和改进。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1