一种基于时空特征提取深度学习的调制模式识别方法
1.本发明涉及一种调制模式识别方法,尤其涉及一种基于时空特征提取深度学习的调制模式识别方法。
背景技术:
2.通信信号在传输过程中,通常会受到信道中不利的影响因素的影响,如噪声、多径衰落、阴影衰落、中心频率偏移、采样率偏移等,会使得接收信号产生幅度衰减、载波频率和相位偏移。自动调制识别(amr)是信号检测和解调之间的一个重要步骤,它提供了检测调制方案的基本功能。随着无线通信的快速发展,信号调制方案将变得更加复杂和多样化,以满足日益复杂的通信场景的需求,因此迫切需要设计有效的amr模型。
3.传统的amr研究可以分为两大类:基于似然理论的amr和基于特征的amr。基于似然理论的amr方法通常能获得贝叶斯估计意义上的最优识别精度,但计算复杂度较高。基于特征的amr方法主要从训练样本中学习有代表性的特征,并利用训练后的模型对输入信号进行分类。基于特征的amr方法使用的典型特征类型包括瞬时时域特征、变换域特征、统计特征。机器学习模型越来越多地和基于特征的amr结合,被用于分类,包括人工神经网络、决策树、支持向量机等。相比于基于似然理论的amr,基于特征的amr通常只能得到次优解,但计算复杂度低,多调制识别能力强。
4.随着深度学习在一系列具有挑战性的应用中取得了突破,其性能超越了传统的基于似然理论和基于特征的方法,多层神经网络的堆叠赋予了深度学习强大的特征提取能力,激发了对自动调制识别的扩展研究,其中一些基于深度学习的开创性方法被提出,性能优于传统的方法。有人提出使用卷积神经网络(cnn)来解决自动调制识别问题,采用原始的数据形式(i/q形式)作为输入,它也证明了所提出的cnn模型的识别准确率优于传统方法,但其识别精度还有很大的提升空间,且模型的参数较大。有人提出了一种使用信号幅值和相位作为输入的多通道并行融合技术,其识别准确率相对于之前有较大的提升,但是其采用幅值和相位作为输入,需要将原始的i/q形式的数据转化为幅值相位形式的数据,增加了额外的开销。有人采用长短期记忆神经网络(lstm)来搭建自动调制识别模型,进一步提升了识别准确率,但它同样采用幅值和相位作为数据的输入形式。有人提出了一种类似的模型,它将lstm网络用门控循环单位(gru)来代替,虽然识别准确率有所降低,但是其模型复杂度也有所降低。有人提出了一种时空多通道学习模型,利用来自i/q通道,i通道和q通道数据的互补信息,并利用存在于信号中的空间和时间属性,来实现自动调制识别,是目前为止,自动调制识别领域识别准确率最高的模型,但是模型的参数量和复杂度都比较高。
5.目前基于深度学习的自动调制识别模型复杂度较高,难以在低模型复杂度的情况下实现高识别准确率。目前有一些高识别准确率的模型可以在离线任务中运行,但amr通常需要在线处理,如果模型过于复杂,则会遇到过度的延迟。高计算复杂性也阻止了在资源受限的设备上部署,比如许多内存、计算能力和能量有限的物联网(iot)设备。
技术实现要素:
6.针对现有技术中的上述不足,本发明提供了一种基于时空特征提取深度学习的调制模式识别方法。
7.为了达到上述发明目的,本发明采用的技术方案为:
8.一种基于时空特征提取深度学习的调制模式识别方法,包括以下步骤:
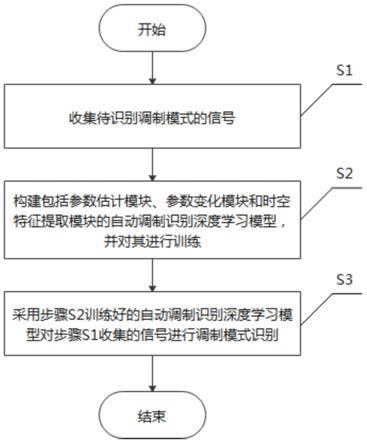
9.s1、收集待识别调制模式的信号;
10.s2、构建包括参数估计模块、参数变化模块和时空特征提取模块的自动调制识别深度学习模型,并对其进行训练;
11.s3、采用步骤s2训练好的自动调制识别深度学习模型对步骤s1收集的信号进行调制模式识别。
12.本发明具有以下有益效果:本发明综合考虑了模型复杂度和识别准确率,在参数量少于现有技术中基于深度学习的自动调制模式识别方法的情况下,识别准确率优于现有的基于cnn网络的调制模式识别方法,接近目前基于深度学习的自动调制模式识别的最高识别准确率,同时在训练开销方面低于现有技术中同等识别准确率水平的方法,本发明还可以直接使用自动调制识别的原始数据作为输入,而不必占用额外的资源对数据进行预处理。
13.优选地,步骤s2包括以下分步骤:
14.s21、选取基准数据集,并设置相关训练参数;
15.s22、将基准数据集中的原始数据y输入参数估计模块,进行原始数据的参数估计,得到参数估计数据ω;
16.s23、将步骤s22得到的参数估计数据ω输入参数变换模块,进行参数变换,得到参数变换后的数据
17.s24、将步骤s23参数变换后的数据输入时空特征提取模块,进行数据的时空特征提取,并自动识别信号的调制模式;
18.s25、根据步骤s24的识别结果判断自动调制识别深度学习模型是否符合预设要求,若是,执行步骤s3,否则返回所述步骤s22。
19.该优选方案具有以下有益效果:该优选方案不仅能够直接利用神经网络对数据进行初步的参数变换,也可以直接对参数变换后的数据进行时空特征提取,可以在较少模型参数的情况下,达到较高识别准确率。
20.优选地,步骤s21具体包括:
21.选取基准数据集、损失函数和优化器,设置初始学习率和批大小。
22.该优选方案具有以下有益效果:基准数据集可用于模型的训练,损失函数用来判断模型在训练的过程中是否收敛,优化器有助于模型在训练的过程中进行参数更新和优化,初始学习率和批大小可根据电脑硬件配置进行适当调整,避免训练时间过长。
23.优选地,步骤s22包括以下分步骤:
24.s221、将基准数据集中的数据作为输入数据,将其i/q数据形式分为i路和q路,分别输入到参数估计模块的两个结构和参数相同的通道中;
25.s222、将数据输入参数设置与数据序列相同的全连接层,对每一个信号数据进行参数估计,得到i路初始参数估计数据ω
10
和q路初始参数估计数据ω
20
;
26.s223、将步骤s222得到的数据ω
10
和ω
20
输入激活函数层和dropout层,得到i路参数估计数据ω1和q路参数估计数据ω2;
27.s224、对通过激活函数层和dropout层后的数据ω1和ω2进行数据拼接和维度变换,得到参数估计数据ω。
28.该优选方案具有以下有益效果:从amr的原始信号中估计出了信道带给信号的相位偏移和频率偏移等不利影响,便于后续步骤去除这些影响,设置了激活函数层和dropout层防止模型过拟合。
29.优选地,步骤s224具体包括:
30.对通过激活函数层和dropout层后的数据ω1和ω2进行维度变换,然后将维度变换后的i路和q路数据进行数据拼接,最后再增加一维数据维度。
31.该优选方案具有以下有益效果:采用了维度变换和数据拼接步骤使得参数估计模块的输出和参数变换模块的输入能够相匹配。
32.优选地,步骤s23具体包括:
33.将原始数据y和步骤s22得到的参数估计数据ω输入参数变换模块,用原始数据减去参数估计模块的输出数据,得到参数变换后的数据
34.该优选方案具有以下有益效果:在步骤s22参数估计模块得到的输出的基础上抵消了信道中的不利因素对信号的影响。
35.优选地,步骤s24包括以下分步骤:
36.s241、将步骤s23得到的参数变换后的数据输入时空特征提取模块中的cnn网络层进行空间特征提取,得到空间特征提取后的数据y
c
;
37.s242、将步骤s241得到的空间特征提取后的数据y
c
进行维度变换,然后输入时空特征提取模块中的gru网络层进行时域特征提取,得到时域特征提取后的数据y
t
;
38.s243、将步骤s242得到的时域特征提取后的数据y
t
输入时空特征提取模块中的softmax层,将信号经过上述步骤处理后的数据映射为所有调制识别类型中的其中一类,完成调制模式识别。
39.该优选方案具有以下有益效果:充分提取了信号数据中具有的重要时间特征和空间特征,确保了基于时空特征的自动调制模式识别的准确率能够达到预期。
40.优选地,步骤s241具体包括:
41.将步骤s23得到的参数变换后的数据输入时空特征提取模块中的cnn网络层,通过cnn网络层中的第一层卷积层初步提取信号的空间特征,并减小数据维度,再通过第二层卷积层将提取到的空间特征进行压缩,完成空间特征提取,得到空间特征提取后的数据y
c
。
42.该优选方案具有以下有益效果:信号数据具有重要的空间相关特征,可以使用cnn网络来提取,且数据通过cnn网络之后数据维度会减少,保留了重要的特征数据,有助于后续的神经网络使用更少的参数,由此减少模型的参数量。
43.优选地,步骤s25具体包括:
44.根据步骤s24的识别结果得到自动调制识别深度学习模型的验证损失,判断自动调制识别深度学习模型的验证损失是否在预设周期1内不减少,若是,将学习率减半,再判断自动调制识别深度学习模型的验证损失是否在预设周期2内保持稳定,若是,执行步骤
s3,否则返回所述步骤s22。
45.该优选方案具有以下有益效果:设置了验证损失在预设周期1内不减少则将学习率减半,确保了模型训练精度的同时缩短了模型训练时间,还设置了预设周期2内保持稳定的判断条件,确保了深度学习模型的训练效果。
附图说明
46.图1是本发明一种基于时空特征提取深度学习的调制模式识别方法的流程图;
47.图2是本发明提出的自动调制识别深度学习模型结构示意图;
48.图3是本发明提出的自动调制识别深度学习模型和一些常用模型在rml2016.10a数据集上的准确率对比示意图;
49.图4是本发明提出的自动调制识别深度学习模型和一些常用模型在rml2016.10b数据集上的准确率对比示意图。
具体实施方式
50.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
51.请参照图1,本发明提供了一种基于时空特征提取深度学习的调制模式识别方法,该方法包括以下步骤:
52.s1、收集待识别调制模式的信号;
53.s2、请参照图2(其中input为输入层;i,q分别表示i路和q路;dense为全连接层;activation为激活函数层;dropout为防止模型过拟合的层;concatenate为数据拼接层;conv2d为卷积层;gru为门控循环单元层;softmax为softmax函数层),构建包括参数估计模块(part 1)、参数变化模块(part 2)和时空特征提取模块(part 3)的深度学习模型(命名为pet
‑
cgdnn),并对其进行训练;
54.基于深度学习的amr通常包括调制信号预处理、特征提取和分类三个步骤。预处理用于调整信号的数据格式,本发明不用对数据进行预处理,可直接使用原始数据作为模型的输入,因此减少了预处理部分的计算开销。特征提取和分类可以通过深度神经网络端到端完成,也可以分为两个步骤,先提取特征,然后训练分类模型。本发明直接使用所搭建的深度学习模型进行特征提取和分类,其三个部分结构如下:
55.参数估计模块包括两条结构和参数完全相同的通道i路通道和q路通道,每个通道都包括依序排列的全连接层(dense(l))、激活函数层(activation)和droupout层,以及将两个通道数据进行数据拼接和维度变换的concatenate层;
56.参数变化模块包括一层参数变化层;
57.时空特征提取模块包括由两层conv2d卷积层构成的cnn网络层、gru网络层以及softmax层。
58.将以上三部分所构成的模型整体进行训练,在训练过程中不断测试和调整每部分的层数和参数,最终得到本发明的最终模型。
59.本发明实施例中,步骤s2包括以下分步骤:
60.s21、选取基准数据集,并设置相关训练参数;
61.选择rml2016.10a和rml2016.10b作为模型性能测试的基准数据集,这两个数据集是通过模拟恶劣环境下的传播特性而生成的,rml2016.10a包含11种(8psk,bpsk,cpfsk,gfsk,pam4,am
‑
dsb,am
‑
ssb,16qam,64qam,qpsk,wbfm)调制方式的数据,rml2016.10b包含10种(8psk,am
‑
dsb,bpsk,cpfsk,gfsk,pam4,16qam,64qam,qpsk,wbfm)调制方式的数据。这两个数据集包含信噪比(snr)在
‑
20db到18db之间的模拟数据,数据维数为2
×
128,因此在模型中设置数据序列的长度为128,即l=128。以6:2:2的比例将每个数据集分为训练集、验证集和测试集。以分类交叉熵作为损失函数,adam方法作为优化器,设置初始学习率为0.001,批大小(batch size)设置为400。
62.s22、将基准数据集中的原始数据输入参数估计模块,进行原始数据的参数估计,得到参数估计数据ω;
63.该部分神经网络可以被看作是信道引入的载波频率和相位偏移的一个参数估计器,由一个可训练的函数所构成,可以从amr的原始信号中估计信道带给信号的相位偏移、频率偏移等不利影响。用于自动调制识别的数据集通常是i/q型的数据,每一条数据的维度为(l,2),l表示数据序列的长度,2分别表示i路数据和q路数据。
64.本发明实施例中,步骤s22包括以下分步骤:
65.s221、将基准数据集中的数据作为输入数据,将其i/q数据形式分为i路和q路,分别输入到参数估计模块的两个结构和参数相同的通道中,分别用于估计i路信号和q路信号的参数;
66.s222、将数据输入参数设置与数据序列相同的全连接层,为了得到每一个信号数据的参数信息,考虑到全连接层(dense)的特性,即每个神经元与前一层的每个神经元相连的特征,既能够估计信道对单独每个数据的影响,还能将信号数据间相互的影响估计到全连接层的输出结果中,所以在这里采用全连接层,dense层的参数设置为l(与数据序列长度相同),对每一个信号数据进行参数估计,得到i路初始参数估计数据ω
10
和q路初始参数估计数据ω
20
;
67.s223、将步骤s222得到的数据ω
10
和ω
20
输入激活函数层和dropout层,得到i路参数估计数据ω1和q路参数估计数据ω2,通过实验测试,在模型中使用leakyrelu函数作为激活函数(activation)性能最佳,然后再添加dropout层,防止模型过拟合;
68.s224、对通过激活函数层和dropout层后的数据ω1和ω2进行数据拼接和维度变换,得到参数估计数据ω。
69.本发明实施例中,步骤s224具体包括:
70.为了使得这部分输出与下一个部分的输入维度匹配,对通过激活函数层和dropout层后的i路和q路数据ω1和ω2进行reshape(维度变换)操作,将数据维度变为(l,1),再将i路通道和q路通道的输出结果进行数据拼接,得到(l,2)维的数据,再将拼接后的数据,增加一维数据维度,得到(l,2,1)的参数估计数据ω,作为下一部分的输入。
71.s23、将步骤s22得到的参数估计数据ω输入参数变换模块,进行参数变换,得到参数变换后的数据
72.本发明实施例中,步骤s23具体包括:
73.将原始数据y(维度为(l,2,1))和参数估计数据ω(维度为(l,2,1))输入参数变换
模块,用原始数据y减去参数估计数据ω(维度为(l,2,1)),得到参数变换后的数据以此来抵消信道中的不良因素对信号的影响,实现模型的参数变换功能,这部分在实验中测试了多种参数变换方法,比如加、减、乘、除等,最终发现用减的操作来进行参数变换,模型的性能最优,接着将参数变换后的数据作为参数变换模块的输出。
74.s24、将步骤s23得到的参数变换后的数据输入时空特征提取模块,进行数据的时空特征提取,并自动识别信号的调制模式;
75.本发明实施例中,步骤s24包括以下分步骤:
76.s241、将步骤s23得到的参数变换后的数据输入时空特征提取模块中的cnn网络层,cnn网络层具有空间特征提取特性,通过两层卷积层进行空间特征提取,得到空间特征提取后的数据y
c
;
77.本发明实施例中,步骤s241具体包括:
78.将步骤s23得到的参数变换后的数据输入时空特征提取模块中的cnn网络层,通过实验优化和参数调整,第一层卷积层的通道数量设置为75,卷积核的大小为8
×
2,(l,2,1)维度的数据通过该层后变为(121,1,75),该层卷积层初步提取信号的空间特征,并减小数据维度,第二层的卷积层的通道数量设置为25,卷积核的大小为5
×
1,数据通过该层后变为(117,1,25),该层进一步将上一层提取到的空间特征进行压缩,完成空间特征提取,得到空间特征提取后的数据y
c
。两层卷积层都采用relu函数作为激活函数,卷积核都采用glorotuniform初始化方法对卷积核的参数进行初始化,采用valid的padding(填充)方式;
79.s242、将步骤s241得到的空间特征提取后的数据y
c
进行维度变换(reashape)操作,维度变为(117,25),然后输入时空特征提取模块中的一层门控循环单元(gru网络层)进行时域特征提取,得到时域特征提取后的数据y
t
,门循环单元(gru)是rnn网络的其中一种,相比于另一种rnn网络lstm,使用gru能够达到相当的效果,并且相比之下更容易进行训练,能够很大程度上提高训练效率,因此为了进一步减少训练开销,本发明采用gru而不是lstm。门控循环单元设置为128个单元,因此输出数据的维度为(128);
80.s243、将步骤s242得到的时域特征提取后的数据y
t
输入时空特征提取模块中的softmax层中进行信号的调制模式的识别,将信号经过上述步骤处理后的数据映射为所有可能的调制识别类型中的其中一类,完成调制模式识别。
81.s25、根据步骤s24的识别结果判断自动调制识别深度学习模型是否符合预设要求,若是,执行步骤s3,否则返回所述步骤s22。
82.本发明实施例中,步骤s25具体包括:
83.根据步骤s24的识别结果得到自动调制识别深度学习模型的验证损失,即将当前训练的模型在验证数据集上计算损失函数,判断自动调制识别深度学习模型的验证损失是否在预设周期1内不减少,若是,将学习率减半,再判断自动调制识别深度学习模型的验证损失是否在预设周期2内保持稳定,若是,执行步骤s3,否则返回所述步骤s22。
84.s3、采用步骤s2训练好的自动调制识别深度学习模型对步骤s1收集的信号进行调制模式识别。
85.接下来对本发明提出的深度学习模型(pet
‑
cgdnn)的性能进行测试,请参照图3,
展示了本发明提出的深度学习模型(pet
‑
cgdnn)和一些常用模型在rml2016.10a数据集上的准确率,其中每个模型在rml2016.10a数据集上的参数量和训练时间如表1所示。
86.表1
[0087][0088]
其中cnn2表示使用2层卷积神经网络层的模型;lstm2表示使用2层长短期记忆层的模型;gru2表示使用2层门控循环单元层的模型;1dcnn
‑
pf表示使用一维卷积神经网络的并行融合模型;mcldnn表示多通道卷积长短期深度神经网络模型;pet
‑
cgdnn表示本发明采用参数变换和估计
‑
卷积门控循环单元深度神经网络模型。
[0089]
请参照图4,展示了本发明提出的深度学习模型(pet
‑
cgdnn)和一些常用模型在rml2016.10b数据集上的准确率,其中每个模型在rml2016.10b数据集上的参数量和训练时间如表2所示。
[0090]
表2
[0091][0092]
从上述测试结果可以看出,本发明在使用了最少的模型参数量的情况下,识别准确率接近目前基于深度学习的自动调制模式识别的最高识别准确率。
[0093]
本领域的普通技术人员将会意识到,这里所描述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1