基于多源传感技术的面向车辆局域组网道路区域划分方法
1.本发明属于车联网技术领域,具体涉及一种车辆局域组网道路区域划分方法。
背景技术:
2.车辆道路区域划分,依赖于精准定位即基于北斗、gps差分定位,以及基于视频采集,结合数字图像处理等技术的方法,但民用普及率低,技术成本高,不利于工程应用实现与推广。车辆局域组网对于行驶过程中的车辆区域划分有较高要求,在车路协同过程中,有效精准地完成车辆区域划分,对于实现车辆局域组网通信具有重要意义。
3.目前尚无基于多源传感技术的道路区域划分方法,用以确认车辆位置信息,有效过滤信息并提高行驶车辆间通信、车路协同的效率。
技术实现要素:
4.为了克服现有技术的不足,本发明提供了一种基于多源传感技术的面向车辆局域组网道路区域划分方法,首先在车辆上搭载车辆终端系统,采用虚拟墙系统采集车辆信息;再利用相邻虚拟墙系统将道路划分为若干通信区域,包括基于道路车容量、基于信号衰减和基于路口分类三种划分策略;最终根据划分区域进行区域协同。本发明方法铺设相关传感器成本低,提高了实际工程的可行性。提升车辆组网稳定性,能够适应于多种复杂道路情况。
5.本发明解决其技术问题所采用的技术方案包括如下步骤:
6.步骤1:在车辆上搭载车辆终端系统,采用虚拟墙系统采集车辆信息;
7.所述车辆终端系统能够采集车辆的运动状态与定位信息,对车辆实时状态进行数据分析并实现车辆的无线通信功能;
8.所述虚拟墙包括传感模块、控制模块、通信模块、处理模块和路测边缘计算单元;所述传感模块、通信模块、处理模块和路测边缘计算单元分别与控制模块连接;
9.所述传感模块包括向下传感阵列、侧向光电
‑
微波传感器和向上qtc/光纤
‑
光电传感器阵列;所述向下传感阵列由超声
‑
光电传感器组成,在部分限制高度的路段安装,用于检测车顶高度;所述侧向光电
‑
微波传感器,从侧向检测车辆信息,能与路灯结合提高道路空间利用率;向上qtc/光纤
‑
光电传感器阵列测量车辆轮距和压力;所述传感模块布设在道路上负责采集车流信息和触发车载通信系统,每当车辆经过时传感器能产生特征信号;虚拟墙系统根据车辆通过传感模块时产生的特征信号计算出车辆的行驶速度、方向、车载重量和车型信息;所述处理模块负责传感器信息的处理;
10.所述控制模块控制虚拟墙系统的运行;所述通信模块将实时路况信息与车辆、路侧单元分享;所述路测边缘计算单元对系统采集的信息进行综合计算与分析,给控制模块提供决策支持;
11.多个虚拟墙系统能够共用同一个路测边缘计算单元以降低成本、提高效率;
12.步骤2:利用相邻虚拟墙系统将道路划分为若干通信区域;
13.步骤2
‑
1:基于道路车容量的布设策略;
14.虚拟墙系统依照等间距或等道路容纳量设定间距的方式铺设,相邻虚拟墙间的道路区域为车辆通信区域;车辆能和同一通信区域内的其他车辆及路侧单元通信;
15.步骤2
‑
2:基于信号衰减的布设策略;
16.虚拟墙系统依照通信模块信号每衰减设定分贝的距离进行布设;
17.步骤2
‑
3:基于路口分类的布设策略;
18.对非直线道路的路口进行分类,使用虚拟墙系统对不同类别的路口区域进行分割,布设虚拟墙系统;
19.步骤3:区域组合策略;
20.车辆进入不同的通信区域时,能够和同一通信区域内的车辆终端和路侧单元通信;
21.当需要对多个区域进行协同时,车辆依靠中继系统或基站设备实现跨区域联通协同。
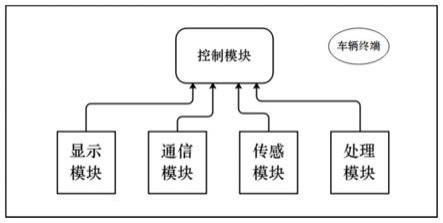
22.进一步地,所述车辆终端系统包括控制模块、显示模块、通信模块、传感模块和处理模块;所述显示模块、通信模块、传感模块、处理模块分别与控制模块连接;显示模块实现人机交互功能,通信模块实现车辆与网络的无线通信功能,传感模块采集车辆运动状态与定位信息,处理模块收集车辆实时状态进行数据分析。
23.进一步地,所述传感模块采用气压管传感器或采用光纤或qtc传感器或激光传感器。
24.本发明的有益效果如下:
25.1、本发明方法铺设相关传感器成本低,提高了实际工程的可行性。
26.2、本发明方法可监测各区域的车流量,提高车辆区域组网效率。
27.3、本发明方法能够提高车辆捕获与身份识别的准确性,提升车辆组网稳定性。
28.4、本发明方法区域划分方法简单,基于多源传感技术的虚拟边界布设方式灵活,能够适应于多种复杂道路情况。
附图说明
29.图1为本发明车辆终端模块框图。
30.图2为本发明虚拟墙系统框图。
31.图3为本发明虚拟墙系统硬件示意图。
32.图4为本发明基于道路车容量划分示意图。
33.图5本发明基于信号衰减划分示意图。
34.图6为本发明十字路口区域划分示意图。
35.图7为本发明环形路口区域划分示意图。
36.图8为本发明十字路口单向协同示意图。
37.图9为本发明十字路口四向间隔协同示意图。
38.图10为本发明十字路口区域协同示意图。
具体实施方式
39.下面结合附图和实施例对本发明进一步说明。
40.本发明要解决的技术问题是:高效实现行驶车辆在复杂道路中的精确区域划分,为后续进行车辆高效局域组网,提高车路协同效率和准确性提供前期支持。
41.一种基于多源传感技术的面向车辆局域组网道路区域划分方法,包括如下步骤:
42.步骤1:在车辆上搭载车辆终端系统,采用虚拟墙系统采集车辆信息;
43.如图1所示,所述车辆终端系统包括控制模块、显示模块、通信模块、传感模块和处理模块;所述显示模块、通信模块、传感模块、处理模块分别与控制模块连接;显示模块实现人机交互功能,通信模块实现车辆与网络的无线通信功能,传感模块采集车辆运动状态与定位信息,处理模块收集车辆实时状态进行数据分析;每当车辆经过时传感器能产生一种特征信号,根据信号时间间隔和传感器间距可计算车速、轴距等,根据压力信号、轴距、轮数可区分不同车型,以此监测通过的车辆并计数,并且可以实时监测各区域中的车流量;
44.如图2和图3所示,所述虚拟墙包括传感模块、控制模块4、通信模块5、处理模块和路测边缘计算单元6;所述传感模块、通信模块5、处理模块和路测边缘计算单元6分别与控制模块4连接;
45.所述传感模块包括向下传感阵列1、侧向光电
‑
微波传感器2和向上qtc/光纤
‑
光电传感器阵列3;所述向下传感阵列1由超声
‑
光电传感器组成,在部分限制高度的路段安装,用于检测车顶高度;所述侧向光电
‑
微波传感器2,从侧向检测车辆信息,能与路灯结合提高道路空间利用率;向上qtc/光纤
‑
光电传感器阵列3测量车辆轮距和压力;所述传感模块布设在道路上负责采集车流信息和触发车载通信系统,每当车辆经过时传感器能产生特征信号;虚拟墙系统根据车辆通过传感模块时产生的特征信号计算出车辆的行驶速度、方向、车载重量和车型信息;所述处理模块负责传感器信息的处理;
46.所述控制模块4控制虚拟墙系统的运行;所述通信模块5将实时路况信息与车辆、路侧单元分享;所述路测边缘计算单元6对系统采集的信息进行综合计算与分析,给控制模块4提供决策支持;
47.多个虚拟墙系统能够共用同一个路测边缘计算单元6以降低成本、提高效率;
48.步骤2:利用相邻虚拟墙系统将道路划分为若干通信区域;可利用虚拟墙系统将任意复杂道路形状划分为若干区域,本实施例仅以典型的直行、十字路口、四路口环岛为例;其他类型如:多路口岔路、环岛、高架、立交可根据实际情况基于相应策略灵活铺设;
49.步骤2
‑
1:基于道路车容量的布设策略;
50.虚拟墙系统依照等间距或等道路容纳量设定间距的方式铺设,相邻虚拟墙间的道路区域为车辆通信区域;如图4所示,通过虚拟墙l1、l2、l3、l4将直行道路划分出五个区域;车辆能和同一通信区域内的其他车辆及路侧单元通信;
51.步骤2
‑
2:基于信号衰减的布设策略;
52.虚拟墙系统依照通信模块信号每衰减设定分贝的距离进行布设;如图5所示,a为路侧单元,其信号强度每衰减x db时,道路长度为d1、d2、d3;路侧单元a信号强度衰减至阈值x db时,覆盖道路长度为d1,传感模块l2、l3间距设定为d1,以l2、l3为边界划分出区域r3,l3、l4间距设定为d2,以l3、l4为边界划分出区域r4,划分出区域r1、r2、r3。
53.步骤2
‑
3:基于路口分类的布设策略;
54.对非直线道路的路口进行分类,使用虚拟墙系统对不同类别的路口区域进行分割,布设虚拟墙系统;针对复杂道路如多路口岔路、环岛等,使用虚拟墙将每个路口区域分割;
55.如图6所示,在十字路口处利用虚拟墙划分出多个区域,可根据需要对多个区域内路侧单元和车辆终端进行协同。如需要疏堵时,可协同n1、w1、s1、e1内所有终端,或者根据需要对其中某几个区域编组协同。
56.如图7所示,图中四路口环岛,将四个路口依次分割为区域r1、r2、r3、r4,使环岛出入口车辆协同通信,由驶出车辆为驶入车辆带来前方路况等信息。
57.步骤3:区域组合策略;
58.车辆进入不同的通信区域时,能够和同一通信区域内的车辆终端和路侧单元通信;
59.当需要对多个区域进行协同时,车辆依靠中继系统或基站设备实现跨区域联通协同。
60.如图8,对十字路口单向协调管控时,将路口某一方向区域协同;如图9,对十字路口疏堵时,可针对路口环形区域n2、w2、s2、e2协同控制。或如图10,将路口处区域e1、n1、w1、s1组合为r1;区域e2、n2、w2、s2组合为r2。当路口需要疏堵时,可对r1、r2区域内车辆分别疏导,远程协调车速和通行顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1