使用无线定位节点进行室内定位的系统及方法与流程
使用无线定位节点进行室内定位的系统及方法
1.本技术为国际申请号为pct/us2018/023005,国际申请日为2018年3月16日,发明名称为“使用无线定位节点进行室内定位的系统及方法”的pct申请于2019年10月28日进入中国国家阶段后申请号为201880027901.6的中国国家阶段专利申请的分案申请。
2.相关申请的交叉引用
3.本技术要求于2017年3月16日提交的标题为“使用非同步信标进行的室内位置定位(indoor position location using unsynchronized beacons)”的第62/472,412号美国临时申请、于2017年7月13日提交的标题为“在灯泡内使用无线同步定位节点进行的室内定位(indoor positioning using wireless synchronized positioning nodes within light bulb)”的第62/532,279号美国临时申请以及于2017年9月20日提交的标题为“在烟雾探测器、警报传感器、灯管和镇流器内使用无线同步定位点进行的室内定位(indoor positioning using wireless synchronized positioning nodes within smoke detectors,alarm sensors,light tubes and ballasts)”的第62/561,097号美国临时申请的优先权,所述美国临时申请的内容在此通过引用整体并入。
4.发明背景
技术领域
5.本公开涉及用于无线移动装置的室内定位的系统及方法。更具体地,本公开涉及使用一个或多个定位节点(pon)来为无线移动装置建立三维位置。
6.相关技术
7.在当今的移动无线环境中,室内位置定位变得越来越重要。室内位置定位的应用可以包括零售、广告、商业和住宅环境。目前,在许多可用的可能室内位置解决方案中,基于使用采用蓝牙标准的低功率信标的解决方案已经成为向移动装置提供室内接近度估计值的流行解决方案。检测特定信标的发射的移动装置可以依赖于发射和接收信号强度的估计值来确定所述移动装置在该信标的位置附近。然而,这种信标技术仅提供接近度信息而不确定室内空间中的三维(例如,x,y,z)位置。
8.一些基于信标的(例如,蓝牙)解决方案可以依赖于接收信号强度指示符(rssi)的估计值来估计移动装置与信标之间的距离。从信标发射的信号具有已知功率,并且测量移动接收器处的接收信号强度。采用路径损失模型,所述系统尝试估计移动装置与信标之间的距离。然而,rf信号的rssi可以根据环境变化而显著变化且尤其是当移动装置与信标之间的距离变大时。提高准确度可能需要大量低功率信标,从而使针对给定房间/空间的安装变得复杂。另一方面,为了扩大范围,信标输出功率增加,导致准确度降低和电池寿命缩短。另外,增加功率电平还可能导致房间或地板模糊,从而不利地影响所安装的一个或多个信标的效用。此外,即使准确地确定了距离,单个信标也不为检测移动装置提供方向信息,且因此没有提供物理位置。
9.对于一些应用,已知精确位置而不是仅仅已知接近度是至关重要的。例如,机器人或无人机在建筑物内部漫游的应用。如果根据本公开的信标放置在室内空间中并且如果每
个机器人或无人机包含用于根据本公开确定其准确位置的电路,则这将导致好得多的室内导航。
技术实现要素:
10.通常,本公开描述了与使用一个或多个pon来为室内环境内的一个或多个移动装置提供三维位置相关的系统及方法。pon可以具有一根或多根天线或发射器。在一个实施例中,pon可以具有多根并置天线。在其他实施例中,pon可以各自具有单根天线。从具有四根或更多根天线的单个pon发出的信号可以为一个或多个移动装置提供三维定位。具有少于四根天线的多个pon也可以用于为一个或多个移动装置提供相同的三维定位。例如,pon可以被实施为灯泡、烟雾探测器、警报模块、运动探测器、灯管、管镇流器以及各种家用或智能家用电子装置。pon可以无处不在地部署在大多数室内空间中。pon可以经由到控制单元或电池的布线连接到主输电线或电源。
11.本文中公开的系统可以包括pon内的某些无线电路,其被配置为发出和/或接收射频(rf)测距信号。pon可以是独立的或并置在其他固定装置(例如,智能灯泡、烟雾探测器和警报模块)内。在一个或多个pon附近的移动装置(例如,智能电话、支持无线的平板计算机等)可以接收所发出的测距信号。移动装置可以与因特网可访问的服务器进行通信,所述服务器提供相关辅助信息,从而允许移动装置基于该辅助信息连同接收的测距信号的定时以高准确度确定所述移动装置的室内位置。这种服务器提供的辅助信息可以包括但不限于附近每个pon的物理位置以辅助进行位置计算,以及包括它们的代码偏移和频率以辅助检测它们的发出信号并对每个信号识别发送pon。
12.本公开的系统、方法和装置各自具有若干创新方面,其单一者并不单独负责本文中所公开的所要属性。
13.本公开的一方面提供了一种用于确定移动装置在室内环境中的位置的系统。所述系统可以具有第一定位节点(pon)。所述第一pon可以具有一根或多根天线并设置在所述室内环境中的第一位置中并且被配置为经由第一天线发射第一调制信号。所述系统可以具有第二pon,其具有一根或多根天线,所述第二pon设置在所述室内环境中与所述第一位置不同的第二位置中并且被配置为经由第二天线发射第二调制信号。所述第二调制信号可以在发射时与所述第一调制信号在时间和频率上同步。所述系统可以具有服务器。所述服务器可以从所述移动装置接收请求,所述请求指示所述移动装置的粗略位置,所述粗略位置与所述室内环境的位置相关。所述服务器可以基于所述请求将与第一pon和所述第二pon相关的辅助信息发射到所述移动装置,所述辅助信息包括所述第一pon和所述第二pon的位置信息以及与所述第一调制信号和所述第二调制信号相关的信号信息。所述服务器可以从所述移动装置接收位置报告,所述位置报告基于在到达所述移动装置时所述第一调制信号与所述第二调制信号之间的相位差。
14.本公开的另一方面提供了一种用于确定移动装置在室内环境中的位置的方法。所述方法可以包括由第一定位节点(pon)经由第一天线发射第一调制信号,所述第一pon具有一根或多根天线并设置在所述室内环境中的第一位置中。所述方法可以包括由第二pon经由第二天线发射第二调制信号,所述第二pon具有一根或多根天线并设置在所述室内环境中与所述第一位置不同的第二位置中,所述第二调制信号在发射时与所述第一调制信号在
时间和频率上同步。所述方法可以包括在服务器处从所述移动装置接收请求,所述请求指示所述移动装置的粗略位置,所述粗略位置与所述室内环境的位置相关。所述方法可以包括由所述服务器基于所述请求将与第一pon和所述第二pon相关的辅助信息发射到所述移动装置,所述辅助信息包括所述第一pon和所述第二pon的位置信息以及与所述第一调制信号和所述第二调制信号相关的信号信息。所述方法可以包括在所述服务器处从所述移动装置接收位置报告,所述位置报告基于在到达所述移动装置时所述第一调制信号与所述第二调制信号之间的相位差。
15.本公开的另一方面提供了一种用于操作移动装置以确定移动装置在室内环境中的位置的方法。所述室内环境可以具有一个或多个定位节点(pon),每个pon具有一根或多根天线。所述方法可以包括在移动装置处确定所述室内环境的粗略位置。所述方法可以包括向服务器发射包括所述粗略位置的请求,所述服务器存储与所述一个或多个pon相关的辅助信息。所述方法可以包括在所述移动装置处基于所述粗略位置从所述服务器接收所述辅助信息。所述方法可以包括从所述一根或多根天线中的第一天线接收第一定位信号。所述方法可以包括从所述一根或多根天线中的第二天线接收第二定位信号,所述第二定位与所述第一定位信号异相。所述方法可以包括从所述一根或多根天线中的第三天线接收第三定位信号,所述第三定位信号与所述第一定位信号和所述第二定位信号异相。所述方法可以包括基于所述第一定位信号、所述第二定位信号和所述第三定位信号之间的单向到达时间差(tdoa)来确定移动装置的位置。
16.本公开的其他特征和优点应从以下描述中明显,所述以下描述通过示例的方式示出了本公开的各方面。
附图说明
17.本公开的实施例关于它们的结构和操作的细节可以部分地通过研究附图来收集,其中相同的附图标记指代相同部分,并且其中:
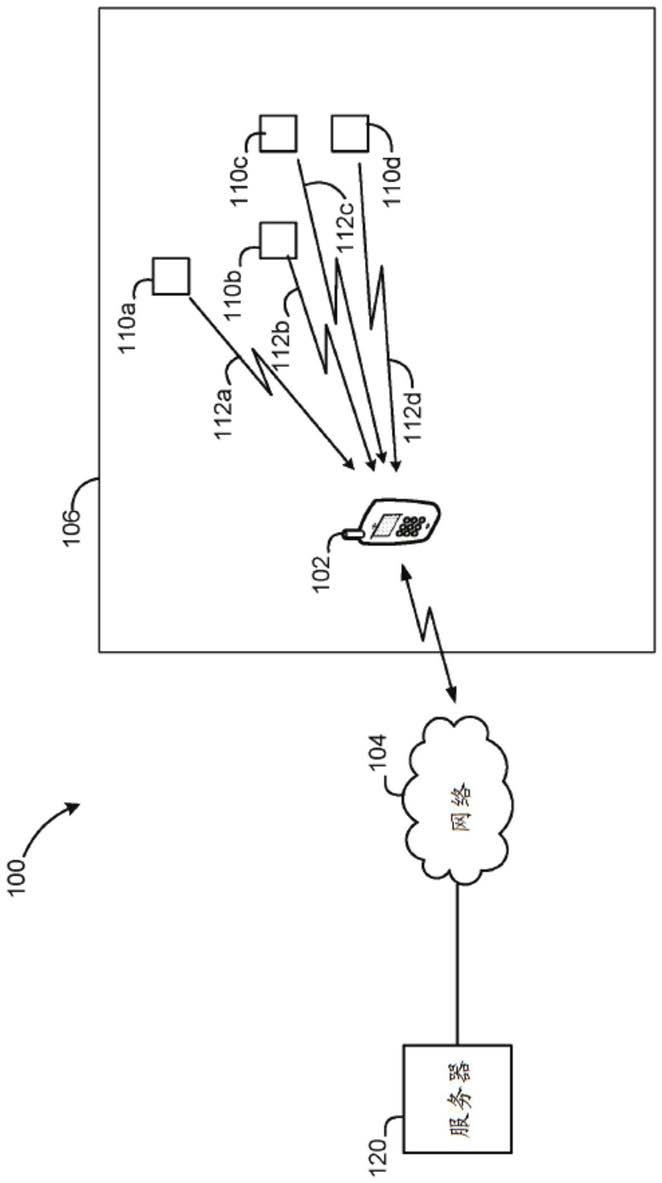
18.图1是用于移动装置的室内定位系统的实施例的图形描绘;
19.图2是图1的定位节点的实施例的功能框图;
20.图3是图2的pon的天线的布置的实施例的图形描绘;
21.图4是用于确定图1的移动装置的二维位置的方法的图形描绘;
22.图5是用于确定图1的移动装置的三维位置的方法的图形描绘;
23.图6是图2的定位节点的射频前端的实施例的功能框图;
24.图7是与图6的rf前端600一起使用的延迟网络的实施例的功能框图;
25.图8是与图6的rf前端一起使用的延迟网络的另一个实施例的功能框图;
26.图9是图1的定位节点的射频前端的实施例的功能框图;并且
27.图10是图1的定位节点的一部分的实施例的功能框图。
具体实施方式
28.以下结合附图阐述的详细描述意图作为对各种实施例的描述,而不意图表示其中可以实践本公开的仅有实施例。所述详细描述包括用于提供对实施例的透彻理解的目的的具体细节。然而,对于所属领域技术人员将明显的是,本公开没有这些具体细节。在一些情
况下,为了简化描述,以简化形式示出了公知的结构和部件。
29.图1是用于移动装置的室内定位系统的实施例的图形描绘。室内定位系统(系统)100可以具有移动装置102。移动装置102可以是智能电话或包括如本文中所公开的软件和/或硬件的其他移动电子装置。移动装置102可以经由广域网(wan)或网络104通信地耦合到服务器120。网络104可以是例如因特网或其他适用的无线网络。系统100可以与室内环境106相关联或移入和移出室内环境。系统100可以具有与移动装置102一起位于室内环境106内的一个或多个定位节点(pon)110。pon 110在本文中也可以被简称为信标或节点。pon 110被标记为pon 110a、pon 110b、pon 110c和pon 110d,但是可以统称为pon 110。每个pon 110可以发射一个或多个信号112(被示为信号112a、信号112b、信号112c、信号112d),移动装置102可以使用所述信号确定室内环境106内的三维位置。根据需要,连续或周期性地发射信号112。为了便于描述,pon 110被描绘为各自发射单个信号112。然而,如下文所述,每个pon 110都可以具有一根或多根天线,其中每根天线可以发射相应形式的信号112。因此,根据以下实施例,每个pon 110实际上可以根据需要发射一个或多个信号112。
30.当移动装置102在室内移动时,它可能没有足够的信号来经由例如全球定位系统(gps)信号提供精确定位。例如,移动装置102最初可以基于经由上一个已知的室外位置、经由移动装置102的gps位置的粗略位置来确定室内环境106的近似或一般物理位置。在一些其他示例中,移动装置102可以基于来自本地区域中或者甚至室内环境106内的一种或多种网络的wi
‑
fi信号来确定粗略位置。另外,尽管wi
‑
fi信号可以提供一般位置,即,在给定建筑物内部的某处,但是就本文中公开的室内定位系统而言,这种位置信息仍然是“粗略的”。在一些实施例中,由pon 110发射的信号112还可以包括室内环境106的近似位置的指示。在一些实施例中,粗略位置可以具有跨越所识别建筑物内的一个或多个房间的当地附近区域的大小,并且由服务器120使用以提供适当的辅助信息。
31.移动装置102可以确定其粗略位置,例如,在哪个建筑物或建筑物的哪个部分中、在若干房间内。移动装置102可以使用上一个已知的gps、wi
‑
fi或已经从至少一个pon 110接收到信号112来完成该确定。然后可以将该粗略位置信息发送到服务器120。然后,服务器120可以提供包括每个靠近pon 110的位置及其识别信号特性的辅助信息,因此移动装置102可以检测到它们并且可以将每个接收信号112归属于对应的pon 110。移动装置102可以使用该信息来查找室内环境106内的所有pon 110。使用每个pon 110的位置,移动装置102可以使用例如四个信号112来确定所述移动装置的三维位置。在一些实施例中,移动装置102可以使用三个信号112来确定在室内环境106内的二维位置。类似地,仅使用两个信号112,移动装置102就可以确定一维位置。然后,移动装置102可以可选地将计算的位置报告回服务器120。
32.在确定了近似或粗略位置之后,移动装置102可以经由网络104与服务器120进行通信。然后,服务器120可以发射与每个pon 110的位置相关的信息。这种信息可以包括室内环境106内所有pon 110的位置和信号特性。使用该信息,移动装置102然后可以检测并处理从pon 110接收的信号(例如,信号112)以确定所述移动装置在室内环境106内的三维位置。然后,移动装置102可以可选地将计算机位置报告给服务器120,以辅助对pon 110的继续校准和准确度改进。
33.如下文所述,pon 110的某些实施例可以是具有一根或多根天线的单个独立装置。
在一些实施例中,pon 110可以与各种智能装置、物联网(iot)装置和其他常见家用系统共同定位。pon 110可以连续地或周期性地发射多层测距信号和从烟雾探测器、警报模块、灯泡、镇流器和其他iot或智能电器或固定装置内接收多层测距信号。在一些测距系统中,较高的定位分辨率可能需要更复杂和更高功耗的电路。在一些实施例中,系统100(更具体地,pon 110)可以发射多层测距信号,所述多层测距信号可以适应具有各种所需准确度水平的应用。在不需要尽可能最高准确度的应用中,能够使用较为不复杂的电路和更低功率来以它们更低所需准确度确定它们的位置。烟雾探测器、警报传感器、灯泡/灯管、镇流器、iot装置、智能电器等在本文中可以称为收容装置(cd)。cd通常是可以包含pon 110的任何装置。在一些实施例中,如烟雾探测器或灯泡的cd可能具有受限或有限的空间约束。因此,此类装置可以仅容纳单根或至少有限数量的天线。在一些其他实施例中,pon 110还可以是具有一根以上的天线并且在一些情况下具有四根或更多根天线的独立定位装置(例如,不在cd内)。
34.共同定位pon 110于烟雾探测器、警报传感器、灯管或其他常见家用装置中的优点是它们在大多数室内位置中普遍存在以及通常简单的一对一替换。另外,它们可能已经具有可以用于已共同定位的pon 110的恒定连续电源。
35.在一些实施例中,与现有家用装置或cd共同定位的pon 110还可以利用室内环境106内的预先存在的布线或电气/电子主干。除了时间或频率基准之外,这种预先存在的布线还可以提供恒定的连续电源。公共时间或频率基准对于同步相同附近区域内的pon 110的定时和频率可能是重要的,如下面更详细描述的。
36.这些cd可能已经执行了各种电子操作。因此,需要增加定位信标/pon能力的附加硅面积可能不会显著地增加制造成本。另外,pon 110可以利用cd中已经存在的大部分公共电路电路。
37.在一些其他实施例中,pon 110可以硬连线到室内环境106内的连续电源,或者可以具有独立的电源,诸如电池。此类pon 110可以是独立装置。如下所述,pon 110的一些实施例可以具有四根或更多根天线。具有四根或更多根天线的单个pon 110可以独立地向移动装置102提供3d位置。
38.在一些实施例中,系统100可以允许有无限制的同时用户。即,任何数量的移动装置102都可以存在于室内环境106内并且使用pon 110来确定在室内环境106内的三维位置。
39.除了信号112行进的时间和距离之外,移动装置102还可以使用pon 110的已知位置(例如,来自服务器120)来确定其自身位置。在单向到达时间(ow
‑
toa)定位方案中,所有pon 110(在室内环境106中)和移动装置102的时钟都必须精确同步。尽管室内环境106内的pon 110之间的同步是可行的,但是如下所述,要求pon与进入环境的任何和所有移动装置之间同步可能是不可行的。因此,ow
‑
toa的变型是单向到达时间差(ow
‑
tdoa),其中pon 110的时钟彼此同步,但是不需要与移动装置102的时钟同步。在ow
‑
tdoa中,移动装置102的时钟可以不与pon 110同步。移动装置102的时钟相对于pon 110的同步时钟可以具有偏移。ow
‑
tdoa通过要求对ow
‑
toa所需要的进行再次天线测量来处理移动装置102的这种未知或随机时间偏移,但是消除了对移动装置与室内环境106中的pon110同步的需要。
40.在一些示例中,如果使用双向测距系统,则ow
‑
tdoa方法可以消除由长处理或通信延迟引起的某些多用户限制。在ow
‑
tdoa中,测距节点(例如,pon 110)可以连续地发射移动
装置102可以用来确定三维位置的信号112。在一些实施例中,移动装置102可以不将测距信号发射回pon 110或者可以不直接与pon同步。因此,所有pon 110都可以具有公共或同步时钟。在具有多根(例如,四根或更多根天线)的单个pon 110中,这种同步相对简单。从单个pon 110中的天线发射的四个信号112可以容易地具有公共定时源(例如,内部本机振荡器)。在仅具有一根、两根或三根天线的pon 110中,或者在分布于不同装置(例如,cd)之间的pon 110中,可能需要其他同步方法。例如,在分布于室内环境106内的四个不同且分离的灯泡中实施的pon 110可以全部从诸如建筑物内的主电网的公共源接收电力。因此,在至少一个示例中,pon 110可以使用这种电源的频率作为它们的同步信号。
41.图2是图1的定位节点的实施例的功能框图。在一些实施例中,pon 200可以类似于pon 110。pon 200可以具有控制器202。控制器202可以控制pon 200的整体功能。例如,控制器202可以控制信号112从天线210的发射。控制器202可以具有中央处理单元(cpu)204。cpu 204还被实施为一个或多个处理器或微处理器。cpu 204可以具有至少一个基准振荡器或时钟以维持pon 200的定时同步。基准振荡器可以具有例如用于使pon 200与一个或多个其他pon(例如,pon 110)同步的本机振荡器(lo)。
42.例如,控制器202还可以包括调制解调器(未示出)或通信地耦合到cd的调制解调器。为了便于描述,本文中可以根据pon 200描述某些功能的性能,然而,cpu 204或控制器202可以实际执行此类功能。
43.pon 200可以具有存储器206。除了用于执行与用于移动装置102的室内定位相关联的各种任务的指令或代码之外,存储器206还可以存储与其他pon 110、200相关的信息。存储器206可以接收和存储与信号112以及它们与来自其他pon 110的信号112的相应同步相关的数据和其他信息。
44.pon 200还可以具有电源208。电源208可以具有一个或多个电力存储部件,诸如电池。这种电池可以是可再充电的或用户可更换的。在一些实施例中,电源208可以是硬件电源,诸如建筑物中的主电源。例如,在这种情况下,电源208可以是例如110v、120v和50或60循环电力。如下所述,其他配置也是可能的。
45.pon 200可以具有一根或多根天线210。pon 200被示为具有三根天线210a、210b、210n,但是也可以具有单根天线210。pon 200还可以具有两根、三根、四根或更多根天线210,如图2中的省略号所指示。
46.pon 200可以具有至少一个发射器211。例如,发射器211可以耦合到一根或多根天线210以发射信号112。pon 200还可以具有接收器212,所述接收器被配置为经由天线210(例如,天线210a例如)接收信号或各种类型的通信。在一些实施例中,每根天线210都可以具有对应的发射器211(例如,每个pon 200有多个发射器211)。在pon 200具有多根天线210的实施例中,每根天线210都可以被其自己的发射器211驱动。在此类实施例中,仅天线210中的一根可以耦合到接收器212。在一些实施例中,pon 200可以不具有接收器212,因为pon 200可以仅被实施用于发射信号112。
47.在一些实施例中,接收器212中的发射器211可以组合在收发器214中。收发器214可以组合发射器211和接收器212的功能,以便经由天线210耦合到一种或多种通信网络。收发器214还可以实施各种rf前端部件和能力。rf前端可以包括例如一个或多个滤波器、放大器,例如功率放大器或低噪声放大器)、混频器和lo。收发器214还可以经由一根或多根天线
210将pon 200耦合到(无线)网络120。
48.pon 200还可以具有通信总线216。通信总线216可以通信地耦合pon 200的上述部件。
49.在一个实施例中,pon 200可以简单地具有发射器211和单根天线210,而不是收发器214和多根天线210。在单天线配置中,pon 200可以与其他pon 200(例如,多个pon 110)协调使用,以向移动装置102提供室内定位能力。如下面更详细描述的,可能需要四个或更多个信号112来为移动装置102提供三维定位。因此,可能需要四根单天线pon 200来为移动装置102提供这种位置确定。
50.在多天线配置中,每个pon 200都可以各自具有四根或更多根天线。天线210可以几何方式布置,并且每根天线都发射在移动装置102处接收的可区分信号112(图3)。从所示天线210发射的信号可以是不同但内部同步的信号。即,信号在时间、相位和频率上同步。在一些示例中,天线210可以不以线性方式物理布置(图3)。
51.在一些实施例中,pon 200还可以具有两根或三根天线210。在这样的实施例中,可能需要多个pon 200以便将四个信号112提供给移动装置102。
52.pon 200可以实施多种无线电接入技术中的一种。例如,直接序列扩频(dsss)可以用于信号112。通过检查可区分的接收信号(例如,信号112)之间的接收载波相位关系,移动装置102可以确定其相对于检测到的(多天线)pon 200的三维位置。在dsss中,使用不同的代码偏移将每个信号112与其他信号区分开。发出三个以上信号112的pon 200或一组pon 200或室内环境106内的附加信标可以为解决方案提供冗余并提高准确度。在一些示例中,移动装置102接收的信号112越多,三维位置确定就变得越准确。
53.图3是图2的定位节点的天线的布置的实施例的图形描绘。在实施例中,pon 200可以具有四根天线210a、210b、210c、210d的群集300,从而将(主)天线210a放置在群集的中心。在一些实施例中,其他三根(附加)天线210b、210c、210d可以沿着以天线210为中心的圆(以虚线示出)的圆周放置。为了便于描述,图3中仅示出了单个收发器214。然而,类似于上文,群集300的每根天线210都可以耦合到单个的或其自己的发射器211(例如,收发器214)。
54.可以选择附加天线210的位置,使得包括天线210a在内的三根天线不在同一条线上。即,它们可能不以线性方式布置。天线210a已经被标记有m(例如,表示
‘
main’),天线211被标记有n,天线212被标记有sw,并且天线213被标记有sw。n、sw、se是分别与北、西南和东南相对应的示例性方向标签。天线210a、210b、210c、210d中的两者或更多者的线性布置是可能的(例如,图4),然而可以降低提供给移动装置102的室内位置的精度。
55.在实施例中,pon 200可以经由天线210a发出经dsss双相移键控(bpsk)调制的rf信号(例如,信号112)。这可以被称为主信号。pon 200还可以从其他天线n、sw和se发出或发射该dsss主信号的延迟副本。例如,从n、sw和se辐射的信号可以是来自天线210a(m)的(主)信号112的副本,所述副本分别延迟了时间延迟d_n、d_sw和d_se,其中“d”指示延迟周期。延迟了一个以上的扩展码片的dsss信号在接收器(例如,移动装置102)处与主信号之间是可区分的。因此,如果d_n、d_sw和d_se全部都大于来自天线210a的主信号112的一个扩展码片周期,并且彼此分开的一个以上的扩展码片,则移动装置102可以区分来自pon 200的各种接收信号112。如本文中所使用的,码片是直接序列扩频(dsss)代码的脉冲,诸如在直接序列码分多址(cdma)信道接入技术中使用的伪随机噪声(pn)代码序列。
56.假设延迟d_n、d_sw和d_se是已知的并且它们相应的天线是固定的,则移动装置102可以调整时间差,就好像它们全部都是在同一时刻从它们相应的天线210b、210c、210d发射一样。在移动装置102进行这样的调整之后,信号112的各种副本的所计算的到达时间差是四个信号212之间的自由空气路径延迟的差值的函数。如果在校正已知的插入延迟“d”之后同时从天线210a、210b、210c、210d发射所有信号112,则每个信号112都可以在它们的自由空气路径延迟之后到达移动装置102。因为移动装置102和pon 200未与全球时间基准同步,所以通过检查任何(单个)可区分信号112无法测量自由空气路径。然而,移动装置102可以基于来自该pon 200的可区分信号112的到达差值来确定信号112与移动装置102之间的角度以及范围两者。
57.如上所述,pon200可以具有可以具有少于四根的天线210。为了向移动装置102提供足够的信息以进行三维位置确定,在移动装置102处接收的信号112的数量可以大于或等于四。因此,在一些实施例中,可能需要多个pon 200(具有少于四根天线210)用于室内环境106内的三维位置确定。例如,这可能需要两个pon 200(每个pon具有两根天线210)、四根单天线pon 200或者总计四根或更多根天线210(每根天线都发射信号)的其他组合。在存在来自相关联的少于四根天线210的少于四个信号112的情况下,移动装置102可以使用三个信号112来确定二维位置或者使用两个信号112来确定一维位置。
58.图4是用于确定图1的移动装置的二维位置的方法的图形描绘。在图4的示例中,可以在移动装置102处从三根天线410、411、412接收信号112。三根天线410、411、412可以在同一个pon 200内实施,或者它们可以是来自具有信号天线的分离的或分布式(或单天线)pon 200的天线。例如,三根单天线pon 200可以线性布置设置在收容装置内,诸如照明装置(例如,荧光灯管),以线性布置。天线410、411、412也可以设置在单个pon 200内。
59.由m表示的天线(主天线)410和由下标a表示的左天线411以及由下标b表示的右天线412。在该示例中,出于说明目的,所有天线410、411、412都是共线的,但是它们在实际实现方式中不需要共线。实际上,如果天线不是共线的,则在某些情况下可能是有利的。移动装置102由t表示(t表示目标)。
60.天线411、412距主天线410的距离分别为d
a
和d
b
。x
m
表示主天线410m与移动装置102t之间的距离。距离x
a
和距离x
b
分别表示从目标移动装置t到天线411、412的距离。角度是角度t
→
m
→
a
,而角度是角度t
→
m
→
b
。选择a、m和b共线会导致并简化该2d示例的数学运算。从三角学,我们知道,
[0061][0062]
并且,
[0063][0064]
设x
a
‑
x
m
=p
a
+n
a
λ,其中λ是载波波长,n
a
是整数,并且p
a
是差值的分数波长部分。因为d
a
和d
b
在该示例中都被假设为小于λ,所以无论t在平面中可能处于何处,x
a
‑
x
m
和x
b
‑
x
m
都会永远小于λ和n
a
=0。因此,我们可以写为x
a
‑
x
m
=p
a
和x
b
‑
x
m
=p
b
。插入(1)和(2)并简化,
[0065][0066]
[0067]
鉴于因此求解x
m
,
[0068][0069]
然后使用x
m
和(1)或(2)来求解
[0070]
在已知载波相位差p
a
和p
b
时可以求解从主辐射器到t的范围x
m
以及角度然后可以基于m的已知位置(它在安装期间确定)和2d平面中的线的定向a
→
m
→
b来计算点t的位置。我们现在放宽对d
a
和d
b
都小于λ的假设,因此n
a
可能不被假设总是等于零。这意味着测量的p
a
由于整数个载波循环而将变得模糊。这在室外定位领域中是已知的,因为载波整周模糊度和所属领域公知的许多技术可用于缓解其影响。
[0071]
图5是用于确定图1的移动装置的三维位置的方法的图形描绘。图4的布置可以推广到如图5中所示的3d情况。所示的3d情况对应于四根单天线pon(例如,具有一根天线210的pon 200)的布置。对于3d一般情况,主天线m 530周围有四根其他延迟天线。除了中心主天线m之外,3d情况的最小所需集合是三根天线或发射器。另外三根天线被标记为天线a 532、天线b533和天线c 534。天线a、b、c与主天线530m之间的距离分别是距离d
a
、d
b
和d
c
,如所示。每根天线的位置都可以由锚定在主天线530处的单位矢量和由相应天线532、533、534距m的距离来识别。例如,天线a532沿着单位矢量定位并且与m相距d
a
。上述示例,a
z
、b
z
和c
z
对于其中所有天线都位于平面内的二维情况而言为零。然而,天线不需要是共面的。在一些示例中,如果天线不以共面方式布置,则可能更有利,因为消除了位于平面信标后面的对称解。辐射天线可以是具有导电反射平面的类型,且因此仅朝向信标(例如,pon 110)前方辐射,使得朝向信标背面的辐射最小。
[0072]
如在2d情况中一样,从天线530、532、533、534到t处移动装置102的距离是x
a
、x
b
、x
c
和x
m
。项被定义为锚定在m处并指向目标t(例如,移动装置102)的单位矢量。
[0073][0074]
计算和x
m
提供移动装置102在点t(目标)处的3d坐标。从图5中,是范围线xm与定义天线b 533的位置的矢量形成的角度。类似地,对于天线a 532和天线c 534。三角学提供,
[0075][0076]
并且
[0077][0078]
然后
[0079][0080][0081][0082]
在该示例中,项a
z
、b
z
和c
z
为零。另外,和不是独立变量,因为任何两个角度完全定义第三个角度。实际上,
[0083][0084]
其中
[0085]
和,
[0086]
类似于上述2d示例,在3d中
[0087][0088][0089][0090]
求解x
m
,
[0091][0092]
其中
[0093]
和
[0094]
使用x
m
和方程(10)、(11)可以允许确定和
[0095]
根据组合方程(6)、(7)和(8),我们知道,
[0096][0097][0098]
并且是单位矢量,
[0099][0100]
这提供x
m
、v
x
、v
y
和v
z
。目标t的位置是(t
x
,t
y
,t
z
),则,
[0101]
t
x
=x
m v
x
,t
y
=x
m v
y
和t
z
=x
m
v
z
[0102]
在需要在不计算x
m
时求解角度的情况下,即,当使用两根天线时,我们可以通过组合方程来消除x
m
并且在没有x
m
的情况下直接计算的情况下直接计算知这是有用的,因为x
m
由于天线的相对接近而对噪声敏感。然而,和的计算没有那么敏感。提供上述2d和3d解示例作为在3d情况下使用四次测量来解析3d位置的一种实现方式。我们想强调的是,这些只是可以执行以产生位置的计算的示例。它们绝不是得出某个位置的唯一途径。
[0103]
在一些示例中,pon 110(或pon 200)可以放置在室内环境106内的一个或多个可访问位置中。这可以在天花板上的一个或多个点处或在一个或多个墙壁的高处,以在室内环境106中在pon 110与移动装置102之间提供无阻碍路径。移动装置102可以接收信号112并计算到天线和pon 110的距离和方位角。然后,移动装置102可以基于pon 110的位置来计算其3d定向。在一些实施例中,该信息可以进一步上传到服务器120以供将来进入室内环境106的其他移动装置102使用。当移动装置102进入房间(例如,室内环境106)时,它可以检测来自pon 110的识别信号。
[0104]
在另一个示例中,移动装置102可以具有相机。相机可以拍摄室内环境106的若干
照片,使得所得照片在覆盖范围内重叠。每次拍摄照片时,移动装置102都可以基于来自pon 110的信号112执行位置确定并记录结果。房间的重叠照片可以用于构建室内环境106的3d模型。另外,因为移动装置102利用每张照片执行位置测量,所以移动装置102还可以准确地确定pon 110的位置和定向及其与室内环境106的内部的3d模型的关系。该方法构建房间的3d模型并定位pon 110。该3d地图对于需要利用这种新的定位能力的应用非常有价值。此外,移动装置102的x,y,z位置然后可以在包括障碍物、家具、电器、兴趣点等的房间的3d模型的有用背景中使用。
[0105]
图6是图2的定位节点的射频前端的实施例的功能框图。pon200可以具有rf前端600。例如,rf前端600可以耦合到控制器202(图2)。例如,rf前端600可以具有许多与收发器214相同的特征或部件,并且执行与收发器214相同或类似的任务。
[0106]
在一些实施例中,rf前端600可以用于周期性地发射信号112。如上所述,某些实施例可能不需要接收链路,因为可能不要求pon 200必须接收外部信号。因此,rf前端600最少具有驱动每根天线610的至少一个rf发射链路630。为了便于描述,示出了多个rf发射链路630,然而pon 200可以仅具有一根天线210,且因此仅具有单个发射链路630驱动一根天线610。然而,如下所述,具有接收链路也可能具有某些优点。
[0107]
控制器202可以经由rf前端600耦合到一根或多根天线610(示为天线610a
‑
610n)。rf前端600可以具有一个或多个rf上转换或发射链路630。图6中的省略号指示在rf前端600中使用多根天线610a
‑
610n。为了便于描述,发射链路630a的元件是以下描述的主要示例,然而,特征和特性同样适用于多天线实现方式所需的附加发射链路630。
[0108]
来自基带和应用处理器(例如,cpu 204)的低通滤波数字数据可以在同相端口607和正交相位端口608(i&q)处被接收。数模转换器(dac)605可以将数字样本流转换为连续时间模拟信号。可以将i和q模拟信号提供给具有i和q混频器604和90度移相器612的正交上转换器。每个发射链路都可以具有本机振荡器(lo)606,其产生以载波频率的连续的正弦波。lo 606可以耦合到时间基准642。时间基准642可以用于控制每个发射链路630的所有lo 606的振荡。可选地,可以存在控制一个lo 606的一个时间基准642,并且可以在所有发射链路630之间共享这种lo 606的输出。时间基准可以确保所有发射链路630同步。在仅具有单个发射链路630的一些实施例中,rf前端600可以实施如下所述的其他类型的同步。
[0109]
lo 606的输出可以分成同相(i)和正交(q)相位分量并馈送到混频器304。混频器604的输出可以使用组合器603进行组合,然后通过功率放大器(pa)602。pa 602的输出可以流过带通滤波器609以减少带外发射。执行与带通滤波器609类似功能的附加滤波器(未示出)也可以放置在组合器603与功率放大器602之间。然后,在(rf)输出端口601a处可获得发射rf信号以经由天线610a进行发射。该过程可以形成经由rf前端600发射的主rf信号。
[0110]
在rf前端600耦合到多根天线610的实施例中,可以存在多个发射链路630并且所述多个发射链路耦合到相关联的天线610n。经由天线610n发射的一个或多个附加信号112可以从由天线610a发射的主信号112延迟。延迟可以经由模拟或数字电路结合到对应的信号112中。在一些实施例中,某些硬件可以包括用于每个延迟信号副本的时间延迟640,每个发射器到其自己的辐射天线610n。(例如,从cpu 620)馈送i和q输入端口607和608的原始数字数据流可以被复制到多个流中,每个流与其他流相比延迟所需的量。这可以通过将数字移位寄存器(例如,时间延迟640)插入相应的数字发射链路630中来实现,以实现每个发射
流的所需延迟量。在一些实施例中,这种数字移位或时间延迟可以是接收器区分不同信号112所需的最小延迟。在经pn序列bpsk或qpsk(正交相移键控)驱动的dsss调制的情况下,每个信号112的延迟可以与所有其他信号112相差至少一个pn序列时钟周期。例如,该差值可以是一个码片周期的间距。某些应用可能需要一个以上的码片周期的间距以提供保护时间。
[0111]
图7是与图6的rf前端600一起使用的延迟网络的实施例的功能框图。在实施模拟延迟的实施例中,可以在上转换之后但是在天线610n发射之前包括延迟。因此,在使用图7的模拟延迟网络700的实施例中,可以省略图6的时间延迟640。模拟延迟可以使用表面声波(saw)延迟线作为示例。在一些示例中,延迟网络700可以用于在rf处产生延迟副本,如图6中所示的那样。在该模拟实现方式中,来自图6中的端口601a的rf信号可以在经由天线610发射之前被提供给rf功率分配器702。rf功率分配器702的输出可以各自指向其各自的saw延迟线(延迟线)704。saw延迟线在结构上类似于rf电路中用于滤波的saw滤波器。延迟线704被描绘为延迟
‑
0704a、延迟
‑
1 704b、延迟
‑
c 704c、延迟
‑
n 704n。每根延迟线704都可以具有不同的延迟时间。每根延迟线704的输出可以被馈送到相应的天线610。每根延迟线都可以具有单独的延迟元件或延迟线704。实施例可以对所有延迟使用相同的saw衬底。这可以确保所有延迟与环境温度和制造和老化效应的变化成比例地响应。在具有单根天线的pon中,可以不存在延迟网络700。现在,使用模拟延迟线的优点是我们仅需要使用一个发射链路630来驱动功率分配器,所述功率分配器驱动可能需要来自分配器的多根不同的天线610。
[0112]
参考图6和图7,公开了用于针对每根附加天线610延迟主信号112的两种主要方法。在一些示例中,从天线610发射的信号112的延迟副本是有利的,因为它允许移动装置102区分(例如,从天线610a发射的)主信号112的每个副本的原点。这可以被认为是分离主信号112的各种副本的多址方法。使用彼此不同一个以上的扩展码片周期的模拟或数字延迟允许实施如上所述的码分多址(cdma)技术。
[0113]
图8是与图6的rf前端一起使用的延迟网络的另一个实施例的功能框图。在一些实施例中,可以在端口601a与天线610之间实施交换网络800。交换网络800可以使用时分多址(tdma)技术来经由rf发射链路630选择性地选择发射。在一些实施例中,可能仅需要一个rf发射链路630(图6)。来自端口601a的rf信号可以被供应给交换矩阵802。交换矩阵802可以交替地将输出端口601a连接到多个带通滤波器806。带通滤波器被示为806a、806b、806c、806n,但是可以统称为带通滤波器806。
[0114]
交换矩阵802可以具有输入端口808。输入端口808可以从例如控制器202接收交换控制输入。该控制输入可以用于向交换矩阵802指示选择哪根天线610进行发射。可以循序地选择天线路径以进行发射。发射之间的时间可以类似于上述延迟周期。
[0115]
在一些示例中,可以调制由各种天线610发射的信号112以识别发射所述信号的天线610。通常,可以使用任何多址方法来从不同天线610发射信号,同时允许接收器区分哪个信号112或信号分量来自哪根天线610。
[0116]
图9是图1的定位节点的射频前端的实施例的功能框图。前端900可以具有发射链路630和接收链路640。如上所述,可以存在一个以上的rf发射链路630,然而,为了便于描述,在图9中仅示出了一个rf发射链路630a。在rf接收链路640中,可以在天线610b和端口
611处接收所接收的信号。接收链路640还可以具有耦合到端口611的带通滤波器619。接收链路640还可以具有非常可变的增益放大器612(例如,低噪声放大器或lna)。可变增益放大器612可以调整接收信号的带内功率电平。然后可以将调整后的信号馈送到正交解调器,所述正交解调器由功率分配器613、i和q混频器614以及90
°
移相器612组成。接收链路640还可以具有lo 616。在一些实施例中,发射lo 606和接收lo 616都可以耦合到同一时间基准642。在一些实施例中,单个lo 616可以使所有混频器612、614和604同步。时间基准642可以是例如移动装置中的晶体控制振荡器。在通过混频器614之后,信号然后变为基带。可以使用相应的模数转换器(adc)615将信号的同相分量和信号的正交相位分量数字化。然后,可以在用于i流的端口617和用于q流的端口618处输出数字化的样本数据流。
[0117]
在一些实施例中,控制器202可以具有发射处理器622和接收处理器624(例如,cpu 204)。发射处理器622和接收处理器624可以是具有单独的数字信号处理器(dsp)或dsp部件的基带处理器。这些dsp可以在端口607、608、617、618处以高数据速率执行操作。在一些示例中,该cpu 620可以具有管理发射处理器622和接收处理器624的操作的应用处理器。
[0118]
在仅具有一个或多个rf发射链路630的实施例中,cpu620可以仅具有发射处理器622。
[0119]
发射处理器622可以产生+1和
‑
1值的伪随机数序列。这些是由线性反馈移位寄存器(lfsr)使用例如服务器120已知的最大长度多项式对于每个pon(例如,pon 110)产生的。每个pon(例如,pon 200)可以实施不同的多项式以在接收器处区分其信号。在实施例中,系统100中的所有pon 200都可以使用同一多项式。在使用同一多项式的实施例中,每个pon 200都可以使用不同的pn代码偏移来在接收器处区分其信号,如同在cdma通信系统中所做的那样。可以在基带处理器(例如,发射处理器622)中对序列进行低通滤波,以减少所需的rf带宽。在其他实施例中,所述序列可以保持未经过滤,然后被馈送到一个或多个发射链路630。在实现方式中,可以使用bpsk调制,因此仅产生一个序列i。然后将该序列馈送到旋转器(图10),所述旋转器可以将中心频率移位确定的量。尽管被馈送有单个序列,但是旋转器在端口607和608处产生i和q序列的样本。结果是端口601处的rf信号是经bpsk调制的载波,所述载波的频率等于lo频率与由旋转器添加的任何移位频率之和。信号可以由伪随机序列进行bpsk调制。
[0120]
图10是图1的定位节点一部分的实施例的功能框图。如图10中所示,端口617和端口618可以耦合到旋转器650的rx i和rx q输入。控制器202可以提供接收(rx)旋转值。旋转器650中的旋转意图抵消由发射处理器622叠加在信号上的旋转。旋转样本可以被馈送到由上面用于扩展信号的发射处理器622使用的同一伪随机序列供应的一组相关器421。所述序列从服务器120提供给移动装置102,或者在识别相应pon 110的信标或信号112中被识别。
[0121]
这组相关器421中的每个相关器可以产生i值与q值之和。例如,为i产生的总和将对应于大量输入样本的总和,其中每个输入样本乘以与给定假设相对应的pn序列的一个码片。这些总和可以通过直接存储器存取(dma)接口422传递到控制器202。对于涉及猜测正确的pn代码相位和旋转速率的每个相关器假设,产生i
sum
和q
sum
。总和的量值等于我们计算该量值并寻找峰值。我们将注意到峰值群集,每个峰值对应于来自信标辐射天线之一的信号。峰值呈现为在时间上由saw滤波器引入的延迟分开。每个信号
的相位通过使用i
sum
和q
sum
的正负号解析角度的象限取每个相关峰值的tan
‑1(q
sum
/i
sum
)来计算。然后,我们通过由延迟引入的相位变化来调整检测到的相位。然后,从信号112的每个延迟副本的相位中减去主信号(例如,信号112a)的相位。结果是在移动装置102的位置计算中使用的载波相位差p
a
、p
b
和p
c
以及移动装置的位置可以如以上结合图4和图5的数学运算所概述的那样确定。图10指示每个相关组421有一个旋转器650。实施例可以具有多个旋转器650,其耦合到相关器组421的子部分,以便同时在时间和频率(旋转)中进行搜索。
[0122]
在计算残余相位时,由于相位每360度环绕一次的事实,我们可能会偏离一个或多个波长。因此,在计算位置解时,我们对每个p
a
、p
b
和p
c
使用多个假设来计算所述解。我们最终得到了多个可能的解,而不是一个计算的解。幸运的是,使用常识物理约束(诸如拒绝负范围)很容易选择正确的解。房间内的pon 200(例如,pon110)中的附加天线610进一步增加了所选解的稳健性。可以采用其他卡尔曼滤波和传感器融合技术来解决模糊度。
[0123]
在上述实施例中,+1和
‑
1的伪随机序列可以用于调制位置信号,例如信号112。实际上,可以使用任何信号和任何调制。在移动装置102内的接收器中,我们并不是将接收信号与用于调制信号112的+1和
‑
1伪随机序列的副本相关,而是将接收信号与其自身的延迟副本相关。无论主信号的类型和形状如何,该方法都可以为主信号的每个延迟副本产生峰值。然而,重要的是此处提到主信号的带宽决定了延迟副本之间所需的用来将它们区分开的最小延迟。更具体地,主信号的带宽越大,所需的延迟和相关时间就越小。一个示例可以是可变频率调制,诸如啁啾信号。另一个示例可以是使用诸如二极管雪崩噪声源的自然现象来利用信标(例如,pon 110)中产生的纯噪声来调制载波。即使噪声信号是完全随机的并且不能在移动装置102内的接收器处复制,它仍然可以在接收器处与噪声信号自身的延迟副本相关。最后,所述信号可以是当前用于接近应用的标准低能量蓝牙信标当前辐射的相同信号。
[0124]
在一些实施例中,上述(例如,在结合图7描述的那些实施例中),我们使用saw延迟线。然而,可以使用任何其他延迟部件和机制。当辐射信号(例如,信号112)的带宽很大时,所需的延迟可能很小。在这种情况下,也可以使用具有高介电系数、高介电常数和高磁导率、高磁常数的延迟线(例如,延迟线704),所述延迟线在印刷电路板上使用负载迹线。也可以使用导致rf组延迟缓慢的超材料结构。
[0125]
有两个因素直接影响位置确定的准确度。第一个是信标和移动装置处的lo频率的不准确度。第二个是延迟元件在信标处的延迟的温度漂移。
[0126]
移动装置102可以与给定蜂窝系统中的各种小区塔持续接触。移动装置102可以基于来自蜂窝系统的基准信号连续地校准其lo。因此,移动装置102中的lo可以被锁定到非常稳定的频率基准。一旦锁定到蜂窝频率基准,移动装置102的lo就可以冲击来自pon 110的输入信号112,并且可以计算例如pon 200的发射链路630中的lo 606所呈现的任何频率误差。使用该过程,可以最小化或甚至消除pon 200和移动装置102的lo中的频率误差的影响。
[0127]
这是可能的,因为对于室内定位的大多数情况下,移动装置102相对于一个或多个pon 200(例如,pon 110)或wan小区的移动速度不足以导致一个或多个pon 110与接收信号112的移动装置102之间以及蜂窝系统基准与移动装置102之间有显著的多普勒频移。如果移动装置102未连接到蜂窝系统,则可以使用空中多个频率基准中的任何一者。在一个示例中,可以使用具有已知频率的强fm电台。另一种是美国各地在5mhz、10mhz和20mhz上广播的
频率和时间标准。
[0128]
可以使用许多方法来校准pon 110的延迟元件704的延迟变化。
[0129]
在第一种方法中,pon 110可以连续地测量延迟并将其报告给移动装置102。pon 110可以具有接收电路(例如,图9的接收链路640),所述接收电路比较发射端口处的信号与来自延迟元件的一个输出的信号的延迟副本之间的到达时间。因为所有延迟路径都使用同一延迟元件衬底,所以延迟可以全部线性地彼此跟踪。在一个端口上测量的延迟漂移提供了足够的信息来预测所有其他端口上的漂移。然后将该漂移报告给移动装置102,使得可以解决在移动装置102的接收器处的延迟漂移。移动装置102还可以将该信息报告给服务器120以供其他移动装置102在将来使用。
[0130]
第二种解决方案是pon 110在发射期间将载波频率以预定方式移位。这可以在移动装置102的接收器处提供足够的信息以隔离和解决各种元件延迟。
[0131]
第三种方法可以在同一天线610上实施多个延迟副本。在结合图8描述的实现方式中,单根天线610可以发射由延迟元件延迟的主信号112a的一个副本。在该实现方式中,同一天线还可以通过同一延迟元件内的较长延迟路径发射可与其余部分区分的另一个延迟副本。延迟网络800可以为天线610之一产生两个可区分的副本。在移动装置102的接收器处,我们能够直接测量延迟差,因为信号122是从同一天线610发射的。测量到达时间差并已知延迟差应该为多少,可以容易地计算延迟网络800中的延迟漂移并将所述延迟漂移用于补偿其他天线610(如果存在的话)的所有其他副本的延迟。
[0132]
为了延长电池寿命,pon 200可能不会连续发射位置信号。pon 200可以经由例如蓝牙信标周期性地广播识别消息。接收这样的识别消息的移动装置102可以向服务器120询问pon 200的位置和特性。移动装置102可以向pon 200发射在某个功率电平、持续时间和带宽下发射dsss位置信号(例如,信号112)的请求。这种发射可以在服务器120的控制下。移动装置102可以基于例如移动装置102所需的准确度来指定位置信号112的功率电平、持续时间和其他特性。利用来自多个移动装置102的可能的多个请求,pon 200可以发射可以由所有请求装置使用的最佳可能信号。pon 200可以发射所需信号持续所请求的持续时间,并且请求移动装置102可以相应地确定其自己的位置。在有电源可用的商业设施中,可不用担心pon 200节省电池电量。因此,pon 200反而可以连续或周期性地发射识别消息以及位置dsss信号,而无需等待任何请求。
[0133]
在移动装置是发射器的实现方式中,移动装置包含发射链路630(图9)以及基带和应用处理器(例如,发射处理器622和接收处理器624)中的所附支持硬件和软件。例如,假设移动装置102使用已知的伪随机数序列发射经dsss调制的rf信号。取决于pon 200与移动装置102之间的物理关系,可以在每个单独pon天线610处接收具有不同相位的同一个信号112。在pon 200中,可以使用两种方法来测量相位关系。一种实现方式可以针对每根天线610使用图9的单独接收链路640。在接收处理器624中,可以分开处理来自每个接收链路640的每个数据流并恢复相位信息。然后可以区分相位并且可以检测所需的载波相位差p
a
、p
b
和p
c
以用于前面提到的位置计算。
[0134]
备选架构使用与交换矩阵702(图7)类似但在反向方向上使用的rf交换矩阵。现在,该交换矩阵702的公共端口可以耦合到单个接收链路640(图9)。交换矩阵702的其他端口可以各自连接到单独的天线610。在接收期间,交换矩阵702可以在每根天线610之间循序
地交换并且在该连接中停留一小段时间。在此时间期间,基带处理器(例如,接收处理器624)处的检测到的相位可以被分配给当前连接和接收的天线610。当交换矩阵702交换到另一根天线610时,检测到的相位被分配给该天线610,依此类推。利用这种架构,我们可以检测在每根天线处但通过使用一个接收链路640接收的载波的相位。因此,该架构循序地检测相位,而不是同时检测载波相位差p
a
、p
b
和p
c
。停留时间足够长到收集足够的信号以产生准确的相位估计值,但不会太长以至于相位差从一个交换周期变为另一个交换周期。对于典型应用,每根天线610的1
‑
10毫秒停留时间应足以用于信噪比(snr)并且足够短以至于相位不会由于移动装置运动而发生变化。在以上描述中,p
a
、p
b
和p
c
可以表示载波相位差。在使用dsss代码相位的实现方式中也是如此。利用足够的snr,代码相位内的插值也可以产生对来自每根天线的路径之间的长度差的可用估计值,从而产生位置分辨率。
[0135]
节点同步
[0136]
为了使用ow
‑
tdoa提供准确的三维位置信息,所有pon 110的内部时钟同步,或者准确地量化时间偏移。在pon 110的时钟同步的实施例中,并且移动装置102可以基于从pon 110接收的所有信号112的单个或通用定时来执行计算。可选地,如果pon 110的时钟不同步但是它们相对于彼此的时间偏移在移动装置102处是已知的,则移动装置102可以使用这种测量的时间偏移来校正pon 110之间的同步缺乏,并且仍然计算其三维位置。
[0137]
可以实施两步过程以同步pon 110。第一步骤是频率同步,然后是时间同步,如下所述。在第一步骤中,pon 110的内部振荡器锁定到公共频率源。例如,这可以包括同步一个或多个基准振荡器(例如,在控制器202内)。一旦pon 110的时钟同步,这些时钟就可能仍然具有相对于彼此的任意时间偏移。然而,这些偏移可以保持恒定,因为pon 110的所有基准振荡器都被锁定到公共基准。在一些实施例中,pon 110的锁定频率具有绝对准确度可能不是关键的。该同步的重要方面是pon 110在基准下进行频率和相位锁定。相位锁定pon 110促进载波相位测距测量技术,从而产生高位置准确度。另外,智能电话可以具有来自蜂窝网络的准确频率基准,所述准确频率基准可以校准智能电话自己的内部振荡器时钟与室内环境106内的一组pon 110之间的任何大的频率偏移误差。
[0138]
频率同步
[0139]
在一些实施例中,可以使用若干方法来锁定pon 110的频率。一些方法可以使用pon 110外部的基准,而其他方法可以使用pon 110内的共享基准。例如,外部定时基准可以包括附近无线电或电视广播台的载波频率。pon 110还可以具有可以调谐到地方tv、无线电台、蜂窝信号或其他射频源的载波的接收器。所述电台可以向调谐到经同一个电台频率调制(fm)的无线电台工作频率的所有pon 110提供频率基准,所述工作频率足够低以至于穿透到室内环境106。例如,一个值得注意的电台是wwvb nist(它是美国国家标准和技术研究所长波(60千赫)标准时间信号站的无线电台呼号)和全球类似的电台,诸如英国的npl nsf信号。wwvb以60khz广播并且意图在美国各地进行接收。然后,pon 110可以使用这样的无线电信号作为基准频率,因此提供室内环境106中的其他pon 110的频率锁定。
[0140]
然而,射频可能并不总是穿透到所有pon 110的位置。例如,在国家的中部地区发射的信号在沿海地区可能较弱。另外,某些射频可能在室内深处(诸如停车库)没有进行足够的接收。
[0141]
在实施例中,pon 110的一个或多个可以耦合到提供50或60循环电力的主输电线。
例如,pon110a可以是灯泡或烟雾探测器内的单根天线pon。因此,pon 110a可以耦合到50
‑
60hz的输电线频率,以将pon 110a的本机振荡器锁定到单个基准。cd内的其他pon 110可以执行与主输电线的类似同步。在一些示例中,给定输电线的标称频率可以漂移多达5%。因此,频率的绝对值无法准确地用作绝对rf载波中心频率或范围测量值的基准。频率缓慢且在宽阔地理区域中漂移,因此它仍然可以提供在pon 110上均等变化的公共或相对基准。频率或定时的缓慢变化可以如下所述进行校正。
[0142]
在一些示例中,可以对50或60循环输电线信号进行滤波以消除输电线噪声,然后可以将所述信号用作具有长时间常数的锁相环(pll)的基准。这样的时间常数可以长达几秒或几分钟。该50hz或60hz基准驱动其自己的pll以产生与pon 110中的基准振荡器642的标称频率相同的频率。由50hz或60hz驱动的pll在本地产生的这种频率与pon 110内的基准振荡器642进行比较。该振荡器642可以是晶体振荡器或陶瓷谐振器,其具有良好的绝对准确度但漂移性能差。每个pon 110都可以针对其自己的本机振荡器测量输电线导出的频率。可以通过将pon直接耦合到因特网或者通过经过与因特网连接的范围移动装置102来向服务器120提供与输电线频率和其自身振荡器之间的差值相关的信息。服务器120可以存储这样的信息,并进而向pon 110提供定时信息。然后,pon 110可以使用pll中使用输电线作为基准的分频器的相同分频器关系。结果,pon 110内的所有基准本机振荡器642都从属于输电线频率,且因此所有节点都进行频率锁定。
[0143]
第二种方法可以实施由每个pon 110发出的测距信号以同步它们相应的时钟。每个pon 110都可以相同的载波频率发射测距信号,例如,用各种pn扩展码的bpsk扩展。如果一个pon 110解调来自另一个pon 110的测距信号,则接收信号的检测到的多普勒频移可以提供pon 110之间的基准频率偏移的测量值。如果每个pon 110调整其自己的本机基准振荡器以将所有检测到的信号中的多普勒频移的中值驱动为零,则最终所有pon 110将彼此频率锁定。
[0144]
该第二种方法可以通过调整跟踪60hz的主输电线的pll的分频器以产生与从接收其他pon 110的测距信号获得的锁定频率相同的基准频率来进一步改进同步。如果pon 110不能从其他pon 110接收到测距信号以维持频率锁定一段时间,则pon 110使用该60hz主输电线导出的基准来维持频率同步,直到它可以从其他pon 110再次接收到测距信号。
[0145]
在另一个实施例中,每个pon 110都可以交替地将低功率载波(例如,定时信号)发射到主电源上以供其他pon 110接收。如果所有pon 110都可以将它们的本机基准振荡器调整到它们从其他pon 110接收的注入载波的中值,则最终可以实现频率同步。注入载波的频率可以比60hz高几个数量级,使得可以在接收器处滤除主高压频率。
[0146]
在另一个实施例中,在过去几十年期间安装在新建筑中的烟雾探测器(例如,cd)全部都具有将同一场所(例如,室内环境106)内的所有烟雾探测器拴系在一起的低压公共线。这种低压电线可以用于确保相同附近区域的所有烟雾探测器在其中任何一个检测到烟雾时都会发出警报。所述标准指示该电线在非警报条件期间保持低至零电压。检测到烟雾的任何探测器都会发出警报,并将该电线上的电压升至5v
‑
9v。所有其他烟雾探测器单元都会检测到该较高的dc电压,并且所有烟雾探测器也都会发出警报。在实施例中,具有共同定位的pon 110的烟雾探测器中的一者可以在该电线上发射低压ac信号。其他烟雾探测器(例如,pon 110)可以检测该低电平ac信号并使用所述信号来锁定它们的基准振荡器,因此在
探测器中的pon之间提供频率锁定。此外,也可以使用所属领域已知的任何rf调制技术来调制该ac信号,以传达时间信息。使用已安装的电线的这种常见低压信号提供了用于烟雾探测器之间的频率和时间同步的稳健方式。可以在具有例如有线警报传感器的其他系统中实施相同的原理。
[0147]
时间同步
[0148]
同步节点的第二步骤是测量pon 110的本地时钟之间的时间偏移并补偿它们。本文公开了三种方法。
[0149]
第一种方法使用与灯泡(例如,灯泡节点)并置的pon 110之间的双向wifi分组交换。pon 110可以与cd内的wifi调制解调器共同定位。这些wifi调制解调器可以是具有根据其自己的本地时钟何时发射给定wifi分组或何时接收另一个wifi分组的精确定时分辨率的附加能力的标准wifi调制解调器。对于对wifi网络具有可忽略的影响的非常低的占空比,每个pon 110可以周期性地与每个其他pon 110进行双向通信。因为这些wifi调制解调器具有根据它们自己的时钟的分组的tx和rx定时的精确定时分辨率,所以在所有节点之间进行双向交换之后,将有足够的信息来测量和校正所有pon中的所有时钟偏移。此时,pon 110可以进行频率锁定并且在时间上对准,使得能够与不受限制的同时用户(例如,多个移动装置102)实现非常有利的ow
‑
tdoa测距方法,这与在gps中完成的方式相同。标准wifi收发器并非直接被设计用于测距目的。尽管802.11标准规定了接收分组与返回确认之间的周转时间,但是所允许的公差仍然可能高达1微秒(us),从而导致300米的误差。这些cd和智能灯泡内的嵌入式wifi收发器在物理层中的硬件中完成非常精确和校准的发射和接收时间戳和测量以实现亚纳秒定时。
[0150]
实现时间同步的第二种方法是每个节点在功率信号的过零时刻交替地将窄脉冲注入主输电线(例如,经由电源208)。脉冲的发射器(例如,发射pon 110)将根据其自己的本地时钟记录发射时间。其他pon 110可以检测该窄脉冲并根据它们自己的本地时钟记录检测时间。在每个pon 110都已经注入或发射其自己的脉冲之后,所有发射和接收定时数据都被传达到服务器120。服务器120现在具有足够的数据来确定所有pon 110的时钟之间的所有偏移。这种技术起作用是因为假设输电线上的窄脉冲的行进时间在任何给定的两个pon 110之间的两个方向上相等。在此处重要的是要注意,输电线可能是不匹配的、无端接的和分支的网络。因此,对于发射器的每个注入脉冲,我们期望在接收器(例如,pon 110)处接收若干反射脉冲。因此,接收器(例如,pon 110)需要能够隔离这些多个反射脉冲并锁定到第一个到达脉冲上。该方法可以使用连接所有新型烟雾探测器的低压信号线,如上所述。
[0151]
第三种方法使用由每个pon 110发出的测距信号的定时。这些测距信号如下所述。在一些示例中,可以根据发射pon 110的时钟在已知且精确的时间发射测距信号。此外,这些测距信号可以具有允许接收pon 110根据接收pon 110的本地时钟准确地测量接收时间的结构。之后每个pon 110从每个其他pon 110接收测距信号并对测距信号进行计时的协议可以产生足够的数据来计算节点(例如,pon 110)之间的所有时钟偏移。当从一个节点到另一个节点的rf路径在两个方向上对称时,启用该过程。如果在反转路径方向之间经过的时间足够小以至于不包括室内环境变化,则这种假设成立。当我们描述从pon发出的测距信号时,我们将提到关于如何完成的更多细节。
[0152]
我们首先锁定频率,因为这意味着一旦pon 110的时钟对准,它们就会保持对准。
因此,我们不需要多次重复时钟同步过程。换句话说,一旦节点(例如,pon 110)进行频率锁定和时钟对准,pon 110就转向连续发射它们的测距信号,并且对于任何相邻的wifi网络或用于对准时钟的其他资源是不可见的。
[0153]
我们知道一些上述频率锁定和时间偏移测量和校正过程需要通过因特网可访问的专用定位服务器(例如,服务器120)的监督,而其他过程在pon 1120之间是协作的并且不需要服务器干预。
[0154]
锁定节点(例如,pon 110的时间和频率的备选方案是让节点自由运行。我们测量pon 110之间的差值并将频率和时间偏移传送到服务器120,而不是锁定频率和时间。进入室内环境106的移动装置102可以从服务器120接收该信息,并在方程中使用该信息来确定信号112的飞行时间的时间,因此消除了缺乏同步的影响。对时间和频率偏移的测量可以在pon 110的外部进行,或者使用本文概述的方法中的一种在内部进行。在外部,移动装置102可以测量各种pon 110之间的频率偏移误差。这是因为这些频率偏移呈现为移动装置102可以测量并且可以对其进行校正的载波多普勒。可以使用位于附近某处的固定装置来测量定时偏移,所述固定装置针对pon 110的相对物理位置是已知的。然后可以将测量的时间和频率偏移上传到服务器以供移动装置使用。
[0155]
定位节点测距信号
[0156]
现在同步的pon 110可以连续地发射被具体设计用于测距的多个信号。为了防止干扰在相同频带中操作的其他无线装备,pon 110的输出功率被设定为等于或低于美国fcc设定的最大允许功率掩模,并且低于欧洲ecc针对未经许可的发射器在许可或未经许可的频带中操作而设定的更严格限制。遵守美国联邦通信委员会(fcc)和电子通信委员会(ecc)两者的功率极限确保全球兼容操作。所提到的掩模被设定为调节超宽带(uwb)装置的操作,并且被ecc设定为
‑
70dbm/mhz以便在2.4ghz至10ghz的范围内操作。fcc将极限设定为
‑
41dbm/mhz。在一些实施例中,pon 110可以低于为(室内)uwb发射建立的一个或多个掩模的电平发射信号112。因此,在一些实施例中,根据fcc掩模,信号112可以低于
‑
41dbm/mhz的电平发射,或者根据ecc掩模,以低于
‑
70dbm/mhz的电平发射。
[0157]
在一些实施例中,pon 110可以发射三个测距信号。所有测距信号都是经二进制相移键控(bpsk)调制并使用由黄金代码或具有非常长的周期(可能是几天)的最大长度多项式线性反馈移位寄存器(lfsr)产生的伪噪声(pn)序列直接扩展的。三个测距信号由于它们所实现的位置准确度的程度以及解码它们所需的接收器的复杂性而彼此不同。
[0158]
第一信号(我们指定为lpx)由两个分量lpx1和lpx2组成。每个分量都具有置于2.45ghz ism频带内的中心频率,并以大约每秒10兆的码片(10mcps)的码片速率进行扩展。通常,lpx1和lpx2在2.45ghz ism频带内尽可能远离彼此定位以提高宽巷准确度,同时避开强大的高占空比干扰机。lpx1、lpx2中心频率由服务器选择作为无线电链路管理的一部分。lpx2有时也会从起始频率扫描到结束频率,以辅助改进定时恢复。
[0159]
第二信号(我们指定为lpy)由两个分量lpy1和lpy2组成。lpy1和lpy2使用每秒50兆码片(50mcps)的扩展速率。lpy1的中心频率置于5.8ghz ism频带内,并且零点至零点带宽为100mhz。lpy2被定位成lpy1任一侧上相隔250mhz。这将lpy2置于5.8ghz ism频带之外。我们将lpy1置于5.8ghz频带内,以允许已经具有5.8ghz wifi接收器的接收器利用其大部分现有的rf前端。在50mcps下,仅接收和解码lpy1仍将产生有用的准确度。然而,为了获得
更高的准确度,接收器也可以接收lpy2。由于宽巷技术应用于250mhz间距,宽巷波长为1.2米,从而可以轻松实时解决整周模糊度。在50mcps下,可以解决大于6米的多路径发射。因此,对于大型场馆,与lpx1和lpx2相比,多路径效果会降低,但不会被消除,并且仍然会限制小房间的准确度。
[0160]
第三信号(我们指定为lpz)由一个分量lpz1组成,所述分量置于3.4ghz至10.6ghz频带内,远离现有干扰,并具有每秒1500兆码片(1gcps500mcps)的扩展速率,这由于稳健的多路径解析能力而提供最高准确度。在这种码片速率下,解决相差超过30cm的rf信号路径,并且大幅缓解多路径。
[0161]
这些信号分量的确切中心频率处于因特网可访问定位服务器(诸如服务器120)的监督之下。
[0162]
对于所有lpx、lpy和lpz测距信号,每个测距信号的中心频率对于附近的所有节点都是相同的。例如,附近的所有pon发射将以相同的中心频率发射lpx1。使用用于扩展每个信号的pn序列的不同代码偏移,可以使信号彼此区分。我们也可以使用完全不同的代码来区分信号。cdma蜂窝部署使用代码偏移来区分来自每个小区的信号,而gps使用不同的黄金代码来区分卫星。因为我们在室内,所以距离短得多,并且pn代码搜索空间也会由于距离更短并且没有快速的相对运动而变得更小,且因此多普勒搜索空间更低。因此,出于我们的目的,我们可以使用代码偏移或不同代码来区分pon。我们的优选实施例使用代码偏移。
[0163]
我们包括lpx、lpy和lpz的这三个分量使得移动装置(例如,移动装置102)可以在将来随着它们的硬件的发展并允许它们解码对接收和处理的要求越来越苛刻的更高宽带信号而达到更高的位置准确度。此外,一些定位应用不需要更高的准确度,且因此移动装置可以恢复解码一个或多个较低带宽信号以节省成本、降低复杂性和省电。
[0164]
重要的是要注意,本文中描述的系统的实现方式可以使用稍微不同的中心频率、功率电平、带宽、调制或扩展速率或代码。在一些示例中,节点(例如,pon 110)以越来越高的带宽广播若干信号用于通过越来越复杂的接收器的更高准确度。移动装置102还可以通过接收和使用从pon到移动装置发射的单向到达时间差(ow
‑
tdoa)解码pon发射的测距信号来确定移动装置的位置,因此允许有无限制的同时用户。另外,通过iot连接(诸如例如连接的厨房电器)将pon 110共同定位在智能灯泡或房屋周围的其他电器中允许连续的电源和同步源,并且消除了对定制安装和维护室内定位系统100的需要。如果我们认识到由于更严格的节能监管,未来几年预计大部分灯泡将被智能灯泡替换,情况尤其如此。在这些灯泡内嵌入室内位置定位能力除节能之外还为终端用户提供更多激励,以便将灯泡替换为更高效的灯泡。pon也可以位于电源插座内。
[0165]
关于使用测距信号进行节点同步的更多详细信息
[0166]
以下是对使用从每个节点(pon 110)发出的测距信号的频率和时间同步方法的更详细描述。
[0167]
对于所有节点或pon 110,lpx1以相同信道为中心连续发射。请注意,主动发射lpx1信号的节点不能从其他节点接收lpx1,因为其自身发射器的高得多的信号电平掩盖了来自其他节点(pon 110)的弱得多的信号。因此,为了接收其他节点的lpx1信号,本地节点需要暂时关闭其自己的发射器。这样做允许它检测来自所有附近节点或pon 110的lpx1。如果我们将发射器相对于连续发射接通平均持续一半的时间,则我们会失去3db的信号功率,
如希望关联该节点的lpx1的接收器所经历的那样。为了实现频率锁定和时间同步,期望所有pon 110检测所有附近pon 110的lpx1。为了稳健性,没有单个pon 110在该同步中承担主要角色,且因此所有pon 110都可以运行相同的协议。
[0168]
在一些示例中,任何给定节点起作用恰好持续周期t,其中t在10微秒的范围内。在t秒之后,发射器(例如,发射链路630)可以被停用持续在0至2t秒之间的任意周期,然后再次重新激活持续t秒以重复所述循环。随机关闭周期可以在每个循环改变。如果所有节点(pon 110)都使用不同的随机化序列来这样做,则每个节点可以50%的平均占空比进行发射。此外,每个节点都可以在其发射器关闭并且另一节点的发射器开启时(平均持续25%的占空比)从另一节点接收信号。因此,利用这种方法,外部接收器接收的信号比始终保持发射器开启低3db。并且节点从其他节点接收的信号功率平均比连续发射的情况低6db。节点之间的这种损失是可以接受的,因为它们可以长时间相关并且因为它们都是静止的。其他移动接收器的损失完全在系统极限范围内。通过使用除2t以外的极限,我们可以在应用需要时改变所得占空比。
[0169]
总而言之,每个节点接通其发射器持续周期t。然后关闭其发射器持续0至2t之间的任意时间。之后,它开启发射器持续周期t,并循环重复。当在几个循环内平均化时,以均匀概率分布选择0至2t之间的任意时间。重要的是,无论发射器状态如何循环,pn定序器和发生器都保持运行,就像发射器保持接通一样。这很重要,因为它允许接收器保持相关,就如同发射器始终开启一样;导致检测信号有6db的公差功率损失,并避免由于发射器的随机开启和关闭时间而导致的完全同步丢失。
[0170]
在pon 110的接收器侧,接收器可以在其发射器开启时将零插入相关器中以防止自干扰。如上所述,节点可以使用长周期黄金代码来扩展它们的lpx、lpy和lpz中的每一者。为了缩短相关搜索时间,每个节点都可以周期性地向接入点(ap)发射wifi分组,指示从代码开始状态(全部为1)的当前时间偏移。想要检测节点的接收器可以使用该信息来减少搜索的假设集。在初始化期间和频率锁定之前,由于本机基准振荡器频率偏移误差,每个节点都可以相对于其他节点具有频率偏移。节点之间的频率差呈现为由另一个节点对接收信号施加的多普勒频移。在频率锁定之前,每个节点都具有二维搜索空间。一维查找代码相位,而另一维查找多普勒。一旦它从它经历的许多周围节点检测到信号,它就会记录对来自给定节点的每个接收信号施加的多普勒。接收节点然后计算视在多普勒频移的中值并缓慢地使其基准振荡器旋转以将该中值多普勒驱动为零。接收节点还相应地在基带中旋转旋转器以保持对所有接收信号的锁定。当所有节点完成该旋转时,实现频率锁定。当接收节点(例如,pon 110)没有经历任何多普勒并且来自另一个节点的接收信号的相位保持静止时,它可以确定它与其他节点处于频率锁定状态。重要的是,用于旋转本机振荡器的反馈系统的时间常数很大,以防止锁定到错误的解。这是因为测距信号可以不使用视线(los)路径从一个灯泡(例如,以及并置的pon 110)行进到下一个灯泡。这是因为灯泡可以安置于金属反射器内,并且从一个安装在天花板上的灯泡到下一个灯泡的最强路径会从地板上的金属物体上弹回。出于定时目的,从一个灯泡到下一个灯泡的信号路径是否采用视线路径并不重要。这是因为我们可以安全地假设信道在两个方向上都是对称的,且因此即使不是视线,飞行时间仍然会抵消。前面假设使用lpx信号进行定时和频率锁定,然而,lpy或lpz也可以用于定时和频率锁定。
[0171]
如果灯泡和并置的pon 110配备有可以解码lpy或lpz的接收器(例如,接收链路640),则该接收器能够锁定到信号上并解决整周载波模糊度。这是因为这些信号的扩展速率(50mcps的lpy和1gcps的lpz)足够高,使得在给定良好snr的情况下在一个码片内的正常插值足以解决整周载波模糊度。一旦被解决,定时同步可能只有几分之一纳秒或更好。利用lpz,高扩频速率也允许多路径分辨率和紧密得多的时间同步,但是需要更复杂的接收器。
[0172]
如果接收灯泡(和并置的pon 110)专门使用lpx信号,则该灯泡可以解码lpx1和lpx2。使用宽巷技术,lpx1与lpx2之间的中心频率差可能高达80mhz。考虑到80mhz间隔,这导致宽巷波长为3.75米。在仅使用lpx信号并因此在每个灯泡处使用更简单的低带宽接收器时,通常可能在良好snr下在该波长内插值到分辨率解决了整周载波模糊度并导致亚纳秒时间同步。
[0173]
解决载波整周模糊度的备选方法是同步改变lpx2的频率。我们将lpx2的中心频率从2.41ghz滑动到发射节点和其他节点的接收器处的更高频率。当我们增加lpx2的频率时,并且鉴于节点之间的距离是固定的,在接收器处检测到的载波相位将会改变。如果我们将频率从f1改变为f2,则相位将从phi1变为phi2。我们发现,作为中心频率变化的函数的检测相位的变化率与节点之间的距离直接相关。我们使用这种技术来解决节点之间的整周载波模糊度,且因此在节点之间实现的定时和时钟同步优于几分之一纳秒。我们在下面更详细地描述这种技术。
[0174]
我们从所有节点(例如,pon 11)已经通过接收和解码lpx1并经历上述频率锁定方法实现频率锁定的状态开始。lpx2现在类似于lpx1,但是将频率从lpx1的频率改变为更高频率,然后再次恢复到lpx1的频率。锁定到lpx1的接收器具有lpx1相同的代码相位。在已知lpx1的代码相位时,接收器已知lpx2的确切代码相位和lpx2的瞬时频率移位。这是因为频率移位的定时与代码相位对准。锁定到lpx1并使用该信息的接收器会将用于接收lpx2的本机振荡器(lo)同步地改变为lpx2的瞬时频率。这样做是因为lpx2的瞬时频率和lpx1代码相位之间的关系是所有节点先验已知的。在此类情况下,在lpx2中使用的发射器和接收器的lo(接收器是pon 110或检测pon测距信号的移动装置中的那些接收器)进行频率锁定,且因此作为lpx2中心频率的函数的相位变化仅与节点之间的距离相关。这种技术足够好以解决节点之间的载波整周模糊度,且因此允许节点之间的定时同步非常准确。在解决了载波整周模糊度的情况下,可以将定时解析为几分之一波长,其在2.4ghz下小于1纳秒。我们将我们的系统中的载波的频率移位,因为对于所有意图和目的,在我们的系统中,所有东西(例如,pon 110和一个或多个移动装置102)几乎不移动。
[0175]
另外,需要在移动装置102与服务器120或pon 110之间传送的任何信息可以使用例如wifi、蓝牙或任何其他无线通信标准/协议。因此,lpx、lpy和lpz可以通过看似无限、不间断且不受数据影响的pn序列进行调制,所述pn序列纯粹用于测距并且不携带任何信息。因此,对相关时间长度没有限制,从而允许高处理增益和大幅改进的snr。没有在这些测距信号上调制任何数据并锁定所有节点频率允许理论上无限的相关时间和处理增益。这些相关时间仅受需要更快位置更新率的用户动态限制。对于固定或半固定的移动装置102,相关时间分别是不受限制的或限制程度最小的。这对于其中固定用户需要高位置准确度和高可靠性以及因此高snr的应用是有用的。
[0176]
返回到频率锁定,我们可以使用主输电线频率或通过解码相邻节点的lpx1来锁定
相邻节点(例如,pon 110)的频率。更稳健的方法可以结合这两种方法。依赖于lpx1仅意味着依赖于在灯泡中并置的pon 110内的本机振荡器。这些振荡器具有小于百万分之100的数量级的良好绝对准确度,但是可以在具体是作为局部温度的函数的短时间内漂移。然而,主输电线的绝对准确度较差,但是随着时间非常缓慢漂移。在这种混合方法中,我们使用节点的lpx1频率的中值作为真正的绝对频率基准。然后,我们根据该频率来测量本地主输电线。随后,只要lpx1信号丢失,我们就会使用主输电线作为备用频率源。因此,lpx1方法提供准确的频率基准,并且主输电线频率在丢失lpx1信号检测的情况下提供延迟基准,因此保持所有节点锁相。
[0177]
收容装置中的多个定位节点
[0178]
在以下讨论中,pon可以指代仅具有一个发射路径(例如,发射链路630)和可以具有或可以不具有接收器的一根天线(例如,天线610a)的pon 110。在一些实施例中,收容装置可以仅包含一个pon 110。然而,在一些其他实施例中,多个pon 110可以在cd内并置。为了使移动装置102确定其位置,它需要检测来自至少四(4)个这样的pon 110(例如,具有单根天线的pon)的信号。在一些情况下,可以在收容装置中放置一个以上的pon 110。为了发挥作用,每个pon的天线应当与其他并置的pon 110的天线610分开一段距离,以允许良好的所得移动装置位置准确度。由于pon 110和移动装置102之间的不良几何形状,彼此非常接近的天线610导致精度衰减因子(dop)。
[0179]
例如,一些灯管可以长达5ft。在灯管的每个端部处构建两个pon 110可以产生足够的几何形状。在同一个管上有两个以上pon 110可能不是有利的,因为pon 110然后将是共线的并且可能不产生附加的测距信息。由于这个原因,给定一个房间(例如,室内环境106),将两个非共线的、空间上分开的灯管替换为它们各自内部具有两个pon 110的灯管可以完全用仪器测量房间以进行准确的移动装置位置确定,前提是有足够数量的天线610和信号110。请注意,在同一个收容装置中,两个pon 110电路将同步运行,并且将会共享其大部分电路部件。
[0180]
我们在此处提到pon 110的天线610可以间隔开。因此,在烟雾探测器、警报传感器或灯管镇流器的情况下,这些cd可能在其中包含用于多个pon 110的电路并且具有源自这些cd的低轮廓rf电缆,每个所包括的pon 110具有一条电缆,每条rf电缆由对应的天线610终止。在烟雾探测器的情况下,这些rf电缆可以十字形图案铺设在天花板上。电缆和天线可以放置在干墙天花板上方,以提高美观性。例如,可以对警报传感器和镇流器进行相同的操作。如果rf电缆端部处的这些天线610可以充分地间隔开,则每根天线附近只需要一个cd以便于良好的移动装置位置确定。
[0181]
位置确定序列
[0182]
我们现在描述使用pon确定移动装置室内位置的移动装置的操作。系统的第三部件是通信地耦合到网络104(例如,因特网)的服务器120。
[0183]
我们假设移动装置102已经包含wan调制解调器、wifi或蓝牙调制解调器,并且可以通过因特网与远程服务器进行通信。在进入给定房屋(例如,室内环境106)后,移动装置可以接收由灯泡(例如,pon 110)中的wifi或蓝牙调制解调器发出的或者通过例如安装在房间中的路由器发出的wifi或蓝牙信号。这些发射并非为位置确定所特有,而是在例如wifi信号的情况下可以是向ap的注册和与ap连接维护的一部分。此类发射唯一地识别发送
者。pon 110还可以不频繁地使用共同定位的wifi或蓝牙调制解调器来发送识别节点(例如,pon110)并传达pn扩频序列的代码相位信息的导频分组(pp)。然后,移动装置102与服务器120(ls)进行通信,并将其正在检测的wifi或蓝牙信号的id传达给服务器。这可以向服务器120指示与移动装置102在室内环境106内的位置相关的粗略位置信息。
[0184]
移动装置102还可以向服务器120传达它需要的所需准确度水平以及它在能够解码lpx、lpy或lpz信号方面具有哪些能力。使用该信息,服务器120确定移动装置的粗略位置,并向移动装置传达关于附近pon的辅助信息以及这些pon 110的状态。这样的信息包括pon 110相对于房间基准的物理位置、lpx、lpy和lpz测距信号的中心频率以及每个节点的代码偏移以及代码相位。我们之前提到过,用于扩展测距信号的代码周期很长。因此,穷举搜索代码相位是不可行的。为了辅助代码获取,pon 110周期性地和/或不频繁地发射的导频分组(pp)除了用于获得正确的辅助信息的唯一标识信息之外还包含代码相位。在这些导频分组中包括代码相位将代码搜索空间大幅减少到代码相位相关器搜索器假设的一小部分。我们还包括具有来自服务器120的代码相位与辅助信息,但是鉴于不可预测的因特网延迟,这尤其是在lpy和lpz的更快码片速率代码下仍然导致大的代码搜索空间。每个pon 110发射的导频分组在随机时间发出并使用非常低占空比发出几秒钟。在一些示例中,移动装置102可以从一个pon 110接收一个pp,以导出缩小对pon 110附近的所有其他pon的搜索所需的所有信息。这是因为pon 110可以全部同步并且它们之间的代码偏移提供在来自服务器120的辅助信息分组中。
[0185]
可选地,pon 110可以发出具有与lpx、lpy或lpz对准的短得多代码的pn扩展测距信号。尽管缩短代码的测距准确度较低,但是它们可以用于查找较长代码的代码相位。这是因为搜索短代码的所有可能假设是可行的。一旦检测到短代码定时,该定时就用于锁定到具有优越测距能力的其他长代码上。锁定到一个pon的短代码唯一地识别该pon。该信息被传达到服务器120以获得用于定位的所需辅助信息。
[0186]
移动装置102可以使用所有这样的信息来查找测距信号。在以所需准确度锁定到测距信号上之后,移动装置102然后可以使用tdoa技术来测量从每个pon 110到其自身的自由空气延迟,并因此测量从其自身到每个检测到的pon 110的距离。在已知由服务器120提供的pon 110的这些距离和位置之后,移动装置102可以计算其在房间(例如,室内环境106)内相对于pon110和房间基准的位置的位置(例如,粗略位置)。然后,移动装置102可以将其自己位置的报告发射到服务器120,以辅助持续的系统改进准确度并优化附近所有移动装置102的性能。所述报告可以包括移动装置102的计算位置、关于从接收的snr和多路径检测导出的解的准确度的置信度度量、检测到的pon以及lpx、lpy和/或lpz信号中的哪一个用于位置确定以及它们的相对检测功率和相位,以及其他细节。所述报告可以包括由移动装置102接收的测距信号的原始定时测量值。
[0187]
我们之前提到过,由于频率锁定到蜂窝网络,移动装置102可以具有非常准确的频率基准。这些移动装置102还在其向服务器120的位置报告中包括它们自己的基准振荡器与pon 110的中心频率之间的频率偏移。这可以帮助服务器120检测并指示附近pon 110以校正它们的基准振荡器。所述报告主要意图帮助服务器120管理pon 110,包括调整每个pon 110的输出功率以最小化近远问题或者在需要高准确度的情况下将相等的pon 110信号功率引导到房间一侧的移动装置102,并且如果有任何其他移动装置102在房间中,则将很少
的pon信号功率引导到房间一侧的移动装置。如果在附近(例如,室内环境106)需要位置解的所有移动装置102以比其他pon信号高得多的功率电平检测到pon 110信号(例如,信号112),则服务器可以指示该“响亮的”pon 110降低其测距信号的输出功率电平,以便不屏蔽来自其他pon 110的信号。
[0188]
在一些实施例中,随着房间中的移动装置102的数量增加以及它们随房间的物理分布的扩展,可能变得更难以容纳所有这些移动装置,并且服务器120可以尝试尽力而为算法以最小化近远问题的效果,同时保持对用户的所需公平性。如服务器120所指示的实时发射功率调整可以补偿智能灯泡烟雾探测器或警报模块(例如,pon 110)将在给定灯具内经历的不可预测的rf环境。例如,一个灯具会使灯泡凹入金属外壳深处,而其他灯具会使灯泡完全暴露。rf附近。一个灯泡探测器所经历的rf路径衰减可能与其他灯泡、探测器或其他cd所经历的rf路径衰减明显不同。移动装置102返回的位置报告可以提供补偿这些变化的方式,并允许服务器120调整每个pon 110的输出功率。这可以减少移动装置102处来自各个pon 110的接收信号强度的差值。
[0189]
此外,可以通过以下事实进一步缓解近远问题:任何节点110发射器操作50%的时间可以允许听到远处的pon 110。
[0190]
在一些实施例中,可以实施两种类型的位置确定。如上所述,第一位置确定方法可以由移动装置102发起。
[0191]
第二位置确定方法可以由服务器120发起。服务器120可以向移动装置102发送定位请求。定位请求可以包括所需水平的准确度。然后,移动装置102可以发起与结合由移动装置102发起的位置确定所描述的辅助信息请求类似的辅助信息请求。移动装置102可以选择适应来自服务器120的请求所需的准确度水平,或者基于其自身的能力和设置来选择不同的准确度水平。这可以受到(例如,由用户)在移动装置102处实施的隐私设置的影响。在隐私模式中,移动装置102可以匿名地辅助信息,并且可以将或可以不将匿名位置报告发送回服务器120。类似地,服务器120可以通过根据房屋所有者的设置提供有限的辅助信息来允许各种水平的准确度。加密可以用于在移动装置102与服务器120之间交换消息以保护信息的隐私和安全性。
[0192]
可互换的发射和接收角色
[0193]
到目前为止,我们已经描述了pon 110发射测距信号而移动装置102接收到一个或多个测距信号并确定其位置。这是有利的,因为它允许具有频繁更新的无限数量的同时和要求苛刻的用户。在一些情况下,具体是对于具有低定位更新频率的少量用户,移动装置102发出与lpx、lpy或lpz类似的测距信号并使pon 110接收信号并向服务器120报告所发出信号至在其中计算移动装置的位置的服务器的相应到达时间可能是有利的。所述系统的优选实施例是pon 110发射测距信号,并且移动装置102接收它们并确定它们的位置。然而,系统100可以在任一模式下操作,并且还可以在pon 110正在发射测距信号(例如,信号112)以使移动装置102确定它们的位置同时监听来自低更新发射移动装置的低占空比测距信号的情况下操作。
[0194]
系统安装
[0195]
在一些实施例中,室内环境106内的一些或所有灯泡、烟雾探测器和/或警报模块可以被替换为包含pon 110的智能装置(或cd)。为了正确操作,这些pon 110需要频率锁定
并且它们之间需要同步,如前所述。另外,cd/pon 110的物理位置应当为服务器120所已知,使得服务器120可以将该信息作为其发送到进入室内环境106的移动装置102的辅助信息分组的一部分来传达。重要的是此处要注意,pon 110的物理位置与pon 110使用的天线610的辐射中心相关。这可能对应或可能不对应于灯泡烟雾探测器或警报传感器的物理特征,因此物理勘测方法(诸如勘测装置)可能不会产生所需值。相反,我们将使用逆算法来确定服务器所需的物理位置,以便正确和准确地操作。
[0196]
根据前述内容,移动装置102应当从最少四个pon检测信号(例如,信号112)并测量距所述最少四个pon的距离,以确定移动装置在房间内的位置。在具有单根天线610的每个pon 110上预测最少四个pon 110。如果pon 110具有一根以上的天线610,则所需数量可能减少。为了便于描述,以下假设pon 110具有一根天线610。
[0197]
相反,如果移动装置102测量来自在房间内的四个已知点处所有pon 110的测距信号,则根据具体情况,存在足够的信息来确定所有pon 110或cd的位置。
[0198]
例如,假设已经安装了包含pon 110的cd或智能灯泡、烟雾探测器和警报传感器,它们正在与服务器120进行通信,并且他们的pon 110已经实现了频率锁定和时钟时间对准。我们还假设我们的房间(例如,室内环境106)的基准是房间入口的门框的右侧与地板相交的点。具有用于接收由pon 110发出的测距信号112所需的硬件和软件的移动装置102可以勘测模式而不是正常的位置确定模式进行配置。在该示例中,勘测模式如在正常模式中的那样执行所有操作,除了它仅将由移动装置102接收的所有测距信号112的tdoa返回到服务器120而不计算位置并将其返回到服务器120之外。在勘测模式中,移动装置102可以循序地放置在室内环境106的入口处的门的各个位置(例如,在4个角落处)。然后,移动装置102可以执行所需的rf测量并将结果连同在其中进行测量的角落的标识一起传达到服务器120。根据此类测量,服务器120现在具有足够的信息来确定pon110在空间(例如,室内环境106)内的位置。
[0199]
备选方法是用移动装置102缓慢地跟踪门框。移动装置102可以沿着每一侧获取连续读数。该方法还可以提供足够的信息以产生pon110的位置。因为门框通常是平面的,所以存在关于pon 110驻留在门的哪一侧的模糊度。房间内部任何一点处的一次附加测量足以解决这种模糊度。最后,需要测量门的尺寸并将其传达到服务器120。这很容易,因为在大多数建筑物中,门的大小相同。所述方法产生的准确度与用户在被提示时放置移动装置的准确度一样准确。对于住宅应用和办公空间来说,它很简单,且也许足够准确。
[0200]
产生更高准确度的另一种方法使用具有由特殊接收硬件使用的四个或更多个接收天线的刚性板,所述特殊接收硬件交替地使用和处理来自每根天线的信号。在制造期间精确地设定天线相对于它们自身以及相对于板上的清晰基准的位置。我们将该板放置在房间内,并且板中的接收器继续依次从每根天线进行测量并且将信息无线地传达到服务器120。由于这些天线相对于它们自身和板上的基准点的精确位置,我们现在精确地知道pon 110相对于这些天线的位置和板上的基准的位置。我们使用勘测技术将在该板上指示的基准点与房间的基准点(诸如门角)相关联。两个基准之间的该相对位置被上传到服务器。这种技术对于商业安装可能更有用。
[0201]
可以设想具有不同复杂性和准确度的其他技术来映射pon 110的位置并将它们上传到服务器120。然而,此处的主题是将移动装置102或等效配备的接收器放置在房间内的
四个或更多个已知点处,并将检测到的pon 110中的tdoa的测量值传达到服务器120。根据该信息,服务器120可以确定pon 110在空间内的位置。在这些测量期间我们放置勘测接收器越准确,对pon 110的位置的计算就越准确。
[0202]
所述系统的一个特征是检测pon 110的位置误差。一些灯泡可以安装在便携式可移动固定装置中。如上所述,在移动装置102可以确定其位置之前,它向服务器120发射包括移动装置102的计算位置的位置报告。这样的报告可以包含移动装置102所经历的测距信号的原始定时。如果移动任何固定装置烟雾探测器或警报传感器,则其相对于其他pon 110的定时与在时钟对准期间测量的定时相比发生变化。此外,在超定解中,移动装置102可以检测到基于时间测量值,在给定在服务器120处记录的pon 110的所述位置的情况下,可未返回合理解。这为服务器120赋予了足够的信息来检测一个或多个pon 110已经移动。此时,系统100(例如,服务器120)可以发起同步过程以重新对准每个pon 110的时钟。另外,冗余位置解可以用于确定哪个固定装置已移动并移动到哪里。一旦时钟被重新对准并且确定了固定装置或cd的新位置,服务器120就会再次准备好以提供一致的辅助信息。以上所有都是自动发生的,因为移动装置102可以在位置确定操作之后与服务器120连续地共享位置报告数据。
[0203]
在实施例中,服务器120可以指示移动装置102何时发送位置确定报告。例如,一旦移动装置102进入房间并从服务器120接收到辅助信息,它通常就不需要获得辅助信息分组用于后续位置更新。这是因为辅助信息在相同附近区域(例如,室内环境106)内不经常改变。此外,服务器120可能不希望在每次位置更新之后都从移动装置102接收位置确定报告。因此,服务器120可以向移动装置102指示关于何时发送报告的频率,或者交替地指定此后需要报告的事件,诸如最小距离移动。以上减少了在移动装置102与服务器120之间交换的流量。例如,在拥挤的场所中,服务器120可以从存在的几个移动装置102请求位置报告。它还可能限制报告的内容。例如,服务器120可以指示一个或多个移动装置102发送仅包含其位置的位置报告,从而允许附近的其他移动装置102发送更多或附加信息。这可以减少所需的流量,同时保持连续调整和性能增强的所有功能性。
[0204]
技术人员将会明白,结合本文中公开的实施例描述的各种说明性逻辑块(例如,本文中描述的各种服务器)、模块和算法步骤通常可以被实施为电子硬件、计算机软件或两者的组合。为了清楚地说明硬件和软件的这种可互换性,上面已经对各种说明性部件、块、模块和步骤在其功能方面进行了总体描述。将这种功能性实施为硬件还是软件取决于强加于整个系统的设计约束。技术人员可以针对每个特定应用以不同方式实施所描述的功能性,但是这种实施决策不应被解释为导致脱离本公开的范围。另外,模块、块或步骤内的功能分组是为了便于描述。在不脱离本公开的情况下,可以从一个模块或块移动特定功能或步骤。
[0205]
与在本文中所公开的实施例结合描述的各种说明性逻辑块和模块(例如,本文中描述的各种服务器)可以用通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或其他可编程逻辑装置、分立门或晶体管逻辑、分立硬件部件或被设计以用于执行在本文中描述的功能的其任何组合来实施或执行。通用处理器可以是微处理器,但是备选地,处理器可以是任何处理器、控制器、微控制器或状态机。处理器也可以被实施为计算装置的组合,例如,dsp与微处理器的组合、多个微处理器、一个或多个微处理器结合dsp核或者任何其他这样的配置。
[0206]
结合本文中所公开的实施例描述的方法或算法的步骤可以直接体现于硬件中、由处理器执行的软件模块中或两者的组合中。软件模块可以驻留在ram存储器、闪速存储器、rom存储器、eprom存储器、eeprom存储器、寄存器、硬盘、可移动磁盘、cd
‑
rom或任何其他形式的存储介质中。示例性存储介质可以耦合到处理器,使得处理器可以从存储介质读取信息和向存储介质写入信息。在备选方案中,存储介质可以与处理器成一体。处理器和存储介质可以驻留在asic中。
[0207]
应当理解,上述益处和优点可以涉及一个实施例,或者可以涉及多个实施例。实施例不限于解决任何或所有所述问题的那些实施例或具有任何或所有所述益处和优点的那些实施例。
[0208]
对
‘
一个’项目的任何引用都是指这些项目中的一者或多者。术语
‘
包括’在本文中用于表示包括所标识的方法块或元件,但是此类块或元件不包括排他列表,并且方法或设备可以包含附加的块或元件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1