配件设备、控制设备及其控制方法与流程
配件设备、控制设备及其控制方法
1.(本技术是申请日为2017年7月25日、申请号为2017106130074、发明名称为“控制设备和方法、摄像设备和系统、镜头设备和存储介质”的申请的分案申请。)
技术领域
2.本发明涉及一种能够提供跟摄辅助的摄像设备。
背景技术:
3.跟摄(follow shot)是一种用于表现快速移动的被摄体的摄像技术。作为拍摄者与移动被摄体相关联地平摇照相机的结果,该摄像技术试图使得移动被摄体在流动背景上静止。
4.在该摄像技术中,拍摄者需要与移动被摄体相适应地平摇照相机,并且由于被摄体的移动速度和平摇速度之间的差异,过高或者过低的平摇速度导致被摄体的图像模糊。作为用于在跟摄摄像时辅助拍摄者的技术,提出了作为针对该问题的一个解决方案的跟摄辅助。跟摄辅助是用于通过基于平摇速度以及根据图像所检测到的被摄体的运动矢量而移动用于图像稳定的移位透镜、来吸收被摄体的移动速度和平摇速度之间的差异的方法。
5.日本特开(jp)2015
‑
197562公开了如下的摄像设备,其中该摄像设备被配置成基于被摄体图像的运动矢量和平摇速度来计算跟摄校正量,通过静止图像拍摄来移动移位透镜,从而拍摄漂亮的跟摄图像。
6.然而,jp2015
‑
197562所述的摄像设备没有考虑所计算出的跟摄校正量超出用于图像稳定的移位透镜(或者图像稳定控制透镜)的可移动范围的情况。在拍摄者未能获得漂亮的跟摄摄像的情况下,拍摄者需要基于图像来判断是拍摄者不恰当地平摇了照相机、还是由于照相机错认了被摄体等因而跟摄辅助进行了不恰当的图像稳定。此外,在不恰当地进行了平摇的情况下,拍摄者需要不断试错以改进其平摇。
7.jp2006
‑
317848公开了用于检测被摄体速度和照相机平摇速度之间的差异、并且使用图像稳定功能来校正与该差异相对应的移位量的跟摄方法。jp2015
‑
161730公开了通过根据曝光时间段和帧频改变振动检测器的输出定时、并且通过使得被摄体图像的运动矢量与振动检测器的输出定时一致来提高被摄体移动速度的检测精度的方法。
8.然而,jp2006
‑
317848和jp2015
‑
161730所述的方法可以在将运动矢量检测器、图像稳定控制器和跟摄辅助控制器设置在同一主体中的镜头一体化照相机中执行,但是无法在镜头可更换照相机系统中执行。
9.通常,用于控制镜头可更换照相机系统中的照相机主体的cpu针对已安装的多种功能始终进行并行处理,并且根据并行处理的优先级,跟摄辅助处理可能延迟。在通过照相机主体和可更换镜头之间的安装端子的数据通信(镜头通信)中,跟摄辅助通信由于用于调焦透镜控制、光圈控制、状态获取等的通信可能中断而可能延迟。
10.换句话说,在镜头可更换照相机系统中,预设定时的镜头通信可能由于镜头通信频带不可用和cpu负荷集中而无法进行。
11.使用具有不同检测定时的运动矢量和镜头角速度可能导致被摄体角速度的错误计算、性能劣化和故障。拍摄者可能在任意定时拍摄静止图像。即使在没有完成用于跟摄辅助的镜头通信的情况下,也需要保持释放响应性以及实现用于校正被摄体的移动成分的跟摄辅助。为了提高镜头可更换照相机系统的跟摄辅助性能,需要适当控制针对运动矢量和镜头角速度的定时。
技术实现要素:
12.本发明提供能够在跟摄校正量超出图像稳定控制透镜的可移动范围的情况下将跟摄辅助结果反馈给拍摄者的、或者能够提高跟摄辅助性能的控制设备、摄像设备、镜头设备、控制方法和存储介质。
13.根据本发明的一个方面的一种控制设备,包括:运动矢量检测器,用于检测运动矢量;以及计算器,用于基于所述运动矢量和角速度检测器所检测到的角速度来计算被摄体的角速度信息,其特征在于,所述控制设备还包括:获取器,用于获取基于所述被摄体的角速度信息所进行的拍摄静止图像时的图像稳定控制的结果;以及控制器,用于控制显示单元以显示所述静止图像和叠加在所述静止图像上的所述图像稳定控制的结果的信息。
14.根据本发明的方面的一种控制设备,包括用于检测角速度的角速度检测器,其特征在于,所述控制设备还包括:图像稳定控制器,用于通过使用基于所述角速度和运动矢量检测器所检测到的运动矢量所计算出的被摄体的角速度信息,来进行拍摄静止图像时的图像稳定控制;以及通信器,用于在拍摄所述静止图像之后,发送所述图像稳定控制的结果。
15.根据本发明的方面的一种摄像设备,其能够可拆卸地安装镜头设备,所述摄像设备包括:图像传感器,用于对经由所述镜头设备所形成的光学图像进行光电转换;运动矢量检测器,用于基于从所述图像传感器输出的图像信号来检测运动矢量;以及计算器,用于基于所述运动矢量和角速度检测器所检测到的角速度来计算被摄体的角速度信息,其特征在于,所述摄像设备还包括:获取器,用于获取基于所述被摄体的角速度信息所进行的拍摄静止图像时的图像稳定控制的结果;以及控制器,用于控制显示单元以显示所述静止图像和叠加在所述静止图像上的所述图像稳定控制的结果的信息。
16.根据本发明的方面的一种镜头设备,其能够安装至摄像设备并且从所述摄像设备拆卸,所述镜头设备包括:摄像光学系统,其包括图像稳定控制透镜;以及角速度检测器,用于检测所述镜头设备的角速度,其特征在于,所述镜头设备还包括:图像稳定控制器,用于通过使用基于所述角速度和运动矢量检测器所检测到的运动矢量所计算出的被摄体的角速度信息,来进行拍摄静止图像时的图像稳定控制;以及通信器,用于在拍摄所述静止图像之后,发送所述图像稳定控制的结果。
17.根据本发明的方面的一种摄像系统,包括摄像设备和镜头设备,所述镜头设备包括:摄像光学系统,其包括图像稳定控制透镜,所述摄像设备包括:图像传感器,用于对经由所述镜头设备所形成的光学图像进行光电转换;运动矢量检测器,用于基于从所述图像传感器输出的图像信号来检测运动矢量;以及计算器,用于基于所述运动矢量和角速度检测器所检测到的角速度来计算被摄体的角速度信息,其特征在于,所述摄像设备还包括:获取器,用于获取基于所述被摄体的角速度信息所进行的拍摄静止图像时的图像稳定控制的结果;以及控制器,用于控制显示单元以显示所述静止图像和叠加在所述静止图像上的所述
图像稳定控制的结果的信息。
18.根据本发明的方面的一种控制方法,包括以下步骤:检测运动矢量;以及基于所述运动矢量和设备的角速度来计算被摄体的角速度信息,其特征在于,所述控制方法还包括以下步骤:获取基于所述被摄体的角速度信息所进行的拍摄静止图像时的图像稳定控制的结果;以及控制显示单元以显示所述静止图像和叠加在所述静止图像上的所述图像稳定控制的结果的信息。
19.根据本发明的方面的一种控制方法,包括以下步骤:检测设备的角速度,其特征在于,所述控制方法还包括以下步骤:通过使用基于所述角速度和运动矢量所计算出的被摄体的角速度信息,来进行拍摄静止图像时的图像稳定控制;以及在拍摄所述静止图像之后,发送所述图像稳定控制的结果。
20.根据本发明的方面的一种非暂时性计算机可读存储介质,用于存储使得计算机能够执行控制方法的程序,其中,所述控制方法包括以下步骤:检测运动矢量;以及基于所述运动矢量和设备的角速度来计算被摄体的角速度信息,其特征在于,所述控制方法还包括以下步骤:获取基于所述被摄体的角速度信息所进行的拍摄静止图像时的图像稳定控制的结果;以及控制显示单元以显示所述静止图像和叠加在所述静止图像上的所述图像稳定控制的结果的信息。
21.根据本发明的方面的一种非暂时性计算机可读存储介质,用于存储使得计算机能够执行控制方法的程序,其中,所述控制方法包括以下步骤:检测设备的角速度,其特征在于,所述控制方法还包括以下步骤:通过使用基于所述角速度和运动矢量所计算出的被摄体的角速度信息,来进行拍摄静止图像时的图像稳定控制;以及在拍摄所述静止图像之后,发送所述图像稳定控制的结果。
22.根据本发明的方面的一种控制设备,包括:运动矢量检测器,用于检测运动矢量;计算器,用于基于所述运动矢量的检测时间段来设置角速度检测器的角速度的检测时间段;以及通信器,用于接收在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息,其特征在于,所述计算器基于所述运动矢量和所述角速度来计算被摄体的角速度信息,以及所述通信器将所述被摄体的角速度信息和所述角速度的检测时间信息相互关联地发送,并且接收曝光开始定时。
23.根据本发明的方面的一种控制设备,包括:通信器,用于接收基于运动矢量的检测时间段所设置的角速度的检测时间段;角速度检测器,用于在所述角速度的检测时间段中检测所述角速度;以及计算器,用于计算曝光时的被摄体的角速度信息,其特征在于,所述通信器发送在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息,接收与所述角速度的检测时间信息相关联的、基于所述运动矢量和所述角速度所计算出的所述被摄体的角速度信息,并且接收曝光开始定时,以及所述通信器基于所接收到的所述被摄体的角速度信息、所述角速度的检测时间信息和所述曝光开始定时,来计算曝光时的所述被摄体的角速度信息。
24.根据本发明的方面的一种摄像设备,其能够可拆卸地安装镜头设备,所述摄像设备包括:图像传感器,用于对经由所述镜头设备所形成的光学图像进行光电转换;运动矢量检测器,用于基于从所述图像传感器输出的图像信号来检测运动矢量;计算器,用于基于所述运动矢量的检测时间段来设置角速度检测器的角速度的检测时间段;以及通信器,用于
接收在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息,其特征在于,所述计算器基于所述运动矢量和所述角速度来计算被摄体的角速度信息,以及所述通信器将所述被摄体的角速度信息和所述角速度的检测时间信息相互关联地发送,并且接收曝光开始定时。
25.根据本发明的方面的一种镜头设备,其能够安装至摄像设备并且从所述摄像设备拆卸,所述镜头设备包括:摄像光学系统;通信器,用于接收基于运动矢量的检测时间段所设置的角速度的检测时间段;角速度检测器,用于在所述角速度的检测时间段中检测所述角速度;以及计算器,用于计算曝光时的被摄体的角速度信息,其特征在于,所述通信器将在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息发送至所述摄像设备,从所述摄像设备接收基于所述运动矢量和所述角速度所计算出的所述被摄体的角速度信息,并且从所述摄像设备接收曝光开始定时,以及所述通信器基于所接收到的所述被摄体的角速度信息、所述角速度的检测时间信息和所述曝光开始定时,来计算曝光时的所述被摄体的角速度信息。
26.根据本发明的方面的一种控制方法,包括以下步骤:检测运动矢量;以及基于所述运动矢量的检测时间段来设置角速度检测器的角速度的检测时间段,其特征在于,所述控制方法还包括以下步骤:接收在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息;基于所述运动矢量和所述角速度来计算被摄体的角速度信息;将所述被摄体的角速度信息和所述角速度的检测时间信息相互关联地发送;以及接收曝光开始定时。
27.根据本发明的方面的一种控制方法,包括以下步骤:接收基于运动矢量的检测时间段所设置的角速度的检测时间段;以及在所述角速度的检测时间段中检测所述角速度,其特征在于,所述控制方法还包括以下步骤:发送在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息;接收与所述角速度的检测时间信息相关联的、基于所述运动矢量和所述角速度所计算出的被摄体的角速度信息;接收曝光开始定时;以及基于所接收到的所述被摄体的角速度信息、所述角速度的检测时间信息和所述曝光开始定时,来计算曝光时的所述被摄体的角速度信息。
28.根据本发明的方面的一种非暂时性计算机可读存储介质,用于存储使得计算机能够执行控制方法的程序,其中,所述控制方法包括以下步骤:检测运动矢量;以及基于所述运动矢量的检测时间段来设置角速度检测器的角速度的检测时间段,其特征在于,所述控制方法还包括以下步骤:接收在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息;基于所述运动矢量和所述角速度来计算被摄体的角速度信息;将所述被摄体的角速度信息和所述角速度的检测时间信息相互关联地发送;以及接收曝光开始定时。
29.根据本发明的方面的一种非暂时性计算机可读存储介质,用于存储使得计算机能够执行控制方法的程序,其中,所述控制方法包括以下步骤:接收基于运动矢量的检测时间段所设置的角速度的检测时间段;以及在所述角速度的检测时间段中检测所述角速度,其特征在于,所述控制方法还包括以下步骤:发送在所述角速度的检测时间段中所检测到的角速度和所述角速度的检测时间信息;接收与所述角速度的检测时间信息相关联的、基于所述运动矢量和所述角速度所计算出的被摄体的角速度信息;接收曝光开始定时;以及基
于所接收到的所述被摄体的角速度信息、所述角速度的检测时间信息和所述曝光开始定时,来计算曝光时的所述被摄体的角速度信息。
30.通过以下参考附图对典型实施例的说明,本发明的其它特征将变得明显。
附图说明
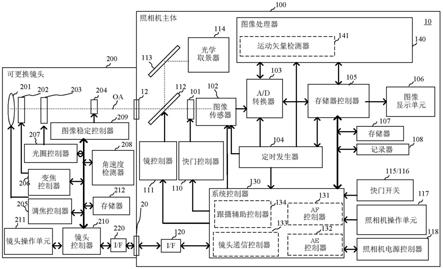
31.图1是根据各实施例的照相机系统的框图。
32.图2是根据各实施例的照相机主体的摄像同步通信处理的流程图。
33.图3是根据各实施例的照相机主体的曝光设置处理的流程图。
34.图4是根据各实施例的照相机主体的静止图像拍摄的流程图。
35.图5是根据各实施例的可更换镜头在同步信号通信中的接收处理的流程图。
36.图6是根据各实施例的可更换镜头在镜头角速度检测时间段的设置通信中的接收处理的流程图。
37.图7是根据各实施例的可更换镜头在被摄体角速度通信中的接收处理的流程图。
38.图8是根据第一实施例的可更换镜头在静止图像拍摄开始定时通信中的接收处理的流程图。
39.图9是根据各实施例的可更换镜头在跟摄辅助结果通信中的接收处理的流程图。
40.图10是根据各实施例的照相机系统的跟摄辅助处理的时序图。
41.图11示出根据各实施例的显示在照相机主体上的示例性拍摄图像。
42.图12是根据第二实施例的可更换镜头在静止图像拍摄开始定时通信中的接收处理的流程图。
43.图13是根据各实施例的照相机主体的曝光设置处理的流程图。
44.图14是根据各实施例的照相机主体的曝光处理的流程图。
45.图15是根据各实施例的可更换镜头在镜头角速度检测时间段的设置通信中的接收处理的流程图。
46.图16是根据各实施例的可更换镜头在被摄体角速度通信中的接收处理的流程图。
47.图17是根据各实施例的可更换镜头在曝光开始定时通信中的接收处理的流程图。
48.图18a、18b和18c是根据第三实施例的照相机系统的跟摄辅助处理的时序图。
49.图19是根据第三实施例的用于计算图像稳定控制器的驱动量的方法的说明图。
50.图20是根据第四实施例的照相机系统的跟摄辅助处理的时序图。
51.图21是根据第四实施例的图像稳定控制器的驱动量的计算方法的说明图。
具体实施方式
52.现在,将参考附图来详细说明本发明的实施例。
53.第一实施例
54.现在,将参考图1来说明根据本发明第一实施例的照相机系统。图1是照相机系统10(摄像设备或者摄像系统)的框图。在本实施例中,照相机系统10包括照相机主体100(摄像设备或者摄像设备主体)和可相对于照相机主体100安装和拆卸的可更换镜头200(镜头设备)。本实施例不局限于该例子,并且可以适用于摄像设备主体与镜头设备一体化的摄像设备。
55.如图1所示,可更换镜头200经由镜头安装单元12可拆卸地安装至本实施例的照相机主体100。可拆卸地安装至照相机主体100的可更换镜头200包括摄像光学系统,其中,摄像光学系统包括调焦透镜201、变焦控制单元202、光圈(孔径光阑)203和图像稳定控制透镜204。图1示出代表调焦透镜201、变焦控制单元202(变焦透镜)和图像稳定控制透镜204各自的一个透镜,但是各透镜可以包括具有多个透镜的透镜单元。经由摄像光学系统所形成的光束被引导至图像传感器102,并且在图像传感器102上形成光学图像。
56.现在,将说明照相机主体100的结构。快门101控制向图像传感器102的曝光量。图像传感器102包括ccd传感器或者cmos传感器,并且将被摄体的光学图像转换成模拟图像信号。换句话说,图像传感器102对通过摄像光学系统所形成的光学图像进行光电转换,并且输出图像信号。图像传感器102可以包括用于焦点检测的多个像素(焦点检测像素)。a/d转换器103将从图像传感器102输出的模拟图像信号转换成数字图像信号,并且将数字图像信号输出给图像处理器140和存储器控制器105。在镜112向下移动时,可以利用光学取景器114通过镜112和113来观察被摄体的光学图像。定时发生器104向图像传感器102、a/d转换器103、图像处理器140、存储器控制器105和系统处理器130提供时钟信号和同步信号。
57.图像处理器140对来自a/d转换器103的数字图像信号和来自存储器控制器105的数据进行预定像素插值处理和颜色转换处理,并且生成图像数据。图像处理器140利用数字图像信号进行预定计算处理。图像处理器140判断被摄体位置,并且基于被摄体的颜色和形状来追踪被摄体。图像处理器140包括运动矢量检测器141。运动矢量检测器141基于所追踪的被摄体的多个帧中的被摄体位置来检测运动矢量(运动向量)。被摄体位置包括被摄体的左上坐标、高度和宽度。经由存储器控制器105,将图像处理器140的计算结果输出给系统控制器130。
58.存储器控制器105控制a/d转换器103、定时发生器104、图像处理器140、存储器107、记录器108和图像显示单元106。经由图像处理器140和存储器控制器105,将来自a/d转换器103的输出数据写入至存储器107和记录器108中。存储器107和记录器108存储所拍摄的静止图像和运动图像。存储器107包括非易失性存储器,并且用作系统控制器130的工作区。记录器108用作包括被安装至照相机主体100的内部或者外部的非易失性存储器的图像记录区域。
59.图像显示单元106(显示单元)包括lcd,并且显示从a/d转换器103所输出的图像或者记录在记录器108中的图像。图像显示单元106可以通过在图像上叠加诸如快门速度、跟摄辅助结果和被摄体位置等的摄像条件来显示摄像条件。如上所述,系统控制器130(控制器)进行控制以使得图像显示单元106显示叠加了与图像稳定控制结果有关的信息的静止图像。快门控制器110基于来自系统控制器130的控制信号,与镜控制器111相关联地控制快门101。镜控制器111基于来自系统控制器130的控制信号来控制镜112。
60.系统控制器130基于来自快门开关115(sw1)、快门开关116(sw2)、照相机操作单元117和存储器控制器105的输入信号,来控制包括照相机主体100的照相机系统10整体。换句话说,系统控制器130根据上述各输入信号,经由i/f 120等控制图像传感器102、存储器控制器105、快门控制器110、镜控制器111和可更换镜头200。
61.快门开关115(sw1)向系统控制器130指示用于af处理、ae处理、awb处理等的操作开始。快门开关116(sw2)向系统控制器130指示曝光开始。接收到曝光开始指示的系统控制
器130经由镜控制器111、快门控制器110、存储器控制器105和i/f 120,控制可更换镜头200,并且开始图像传感器102的曝光。在过去了用于快门速度的时间段之后,系统控制器130结束曝光。系统控制器130经由a/d转换器103,将通过图像传感器102所曝光的静止图像转换成数字数据,并且将其保存在存储器控制器105中。在这种情况下,存储器控制器105保存摄像条件和跟摄辅助结果。此后,系统控制器130将存储在存储器控制器105中的静止图像存储为jpeg和raw数据。将摄像条件和跟摄辅助结果作为exif信息嵌入在静止图像数据中。
62.照相机操作单元117包括多种按钮、触摸面板、电源接通/断开按钮等,并且将通过拍摄者的操作所接受的命令输出给系统控制器130。根据拍摄者经由照相机操作单元117的操作,系统控制器130选择诸如af模式、ae模式和跟摄辅助模式等的各操作模式,作为照相机主体100的多种功能中的一个功能。照相机电源控制器118控制照相机主体100的外部电池和内部电池。如果电池被拆卸掉或者剩余电池量不足,则照相机电源控制器118紧急断开对照相机主体100的控制。在这种情况下,系统控制器130切断向可更换镜头200供给的电力。
63.af控制器131设置在系统控制器130中,并且控制照相机主体100的af处理。在af处理中,根据af模式,af控制器131根据af模式、基于经由i/f 120从可更换镜头200所获得的诸如焦点位置和焦距等的镜头信息以及af评价值,来计算调焦透镜201的驱动量。经由系统控制器130中的镜头通信控制器133和i/f 120,将调焦透镜201的驱动量输入给可更换镜头200。例如,在相位差af模式中,af控制器131基于通过将被摄体的光学图像引导至镜112、未示出的焦点检测副镜112和未示出的聚焦状态判断单元而获得的相位差af评价值等,来计算调焦透镜201的驱动量。在对比度af模式中,af控制器131基于在图像处理器140中所计算出的对比度af评价值,来计算调焦透镜201的驱动量。在摄像面相位差af模式中,af控制器131基于从图像传感器102上的像素(用于焦点检测)所输出的摄像面相位差af评价值,来计算调焦透镜201的驱动量。af控制器131根据诸如单点af模式、多点af模式和面部检测af模式等的af评价模式,来切换用于计算评价值的af框的位置。
64.ae控制器132设置在系统控制器130中,并且控制照相机主体100的ae处理。在ae处理中,ae控制器132根据ae模式、基于经由i/f 120从可更换镜头200所获得的诸如开口f值和焦距等的镜头信息以及ae评价值,来计算ae控制量(诸如光圈控制量、快门控制量和曝光灵敏度等)。经由镜头通信控制器133和i/f 120将光圈控制量输入给可更换镜头200。将快门控制量输入给快门控制器110。将曝光灵敏度输入给图像传感器102。例如,在取景器摄像模式中,ae控制器132基于通过将被摄体的光学图像引导至镜112和113以及未示出的亮度判断单元而获得的ae评价值,来计算ae控制量。在实时取景摄像模式中,ae控制器132基于图像传感器140中所计算出的ae评价值,来计算ae控制量。ae控制器132根据诸如评价测光模式、平均测光模式和面部检测测光模式等的测光模式,来选择用于计算评价值的ae框位置和权重值。
65.跟摄辅助控制器134设置在系统控制器130中,并且控制照相机主体100的跟摄辅助处理。在设置了实时取景摄像模式、并且所安装的可更换镜头200兼容跟摄辅助的情况下,跟摄辅助功能是可用的。如果跟摄辅助功能不可用,则跟摄辅助控制器134根据跟摄辅助模式来控制图像中的流量。更具体地,跟摄辅助控制器134将快门控制量通知给ae控制器
132,从而使得曝光时的模糊角度可以是任意量,并且基于从可更换镜头200中的角速度检测器208所获得的角速度信息等,来控制图像中的流量。
66.另一方面,在跟摄辅助功能可用的情况下,跟摄辅助控制器134根据跟摄辅助模式,经由i/f 120向可更换镜头200指示跟摄辅助处理的可用性。跟摄辅助控制器134基于经由i/f 120从可更换镜头200所获得的诸如镜头角速度信息和焦距等的镜头信息、以及从图像处理器140所输入的运动矢量等,来计算诸如被摄体角速度和被摄体角加速度等的被摄体的角速度信息。因而,跟摄辅助控制器134用作被配置为基于运动矢量和角速度检测器208所检测到的角速度来计算(获得)被摄体的角速度信息的计算器。
67.跟摄辅助控制器134基于帧频、快门速度等来计算镜头角速度检测时间段的设置值,从而使得镜头角速度检测时间段与运动矢量检测时间段一致。经由镜头通信控制器133和i/f 120,将镜头角速度检测时间段的设置值输入给可更换镜头200。镜头角速度检测时间段的设置值包含角速度id信息。添加角速度id信息以使得跟摄辅助控制器134可以识别从可更换镜头200所接收到的镜头角速度属于哪一个时间段。镜头角速度信息也包含角速度id信息,并且角速度id信息和镜头角速度信息相互标记,并且被发送给照相机主体100。
68.镜头通信控制器133设置在系统控制器130中,并且控制照相机主体100和可更换镜头200之间的通信处理。当镜头通信控制器133经由i/f 120检测到安装了可更换镜头200时,镜头通信控制器133开始照相机主体100和可更换镜头200之间的通信以接收必要的镜头信息、并且发送必要的照相机信息和必要的驱动命令。例如,假定设置了实时取景摄像模式、并且所安装的可更换镜头200兼容跟摄辅助。然后,当从定时发生器104输入了摄像同步信号时,镜头通信控制器133执行用于通知从输入摄像同步信号时起到通信开始时的通信开始延迟时间的同步信号通信。在通过快门开关116(sw2)的曝光结束的情况下,镜头通信控制器133接收来自可更换镜头200的跟摄辅助结果信息。在实时取景摄像模式下从定时发生器104输入了摄像同步信号的情况下,镜头通信控制器133同时接收诸如调焦透镜位置、调焦透镜状态、光圈状态和焦距等的各种镜头信息。
69.i/f 120是用于照相机主体100和可更换镜头200之间的通信的接口。i/f120经由照相机主体100中的系统控制器130和镜头控制器210之间的连接器20,通过利用电信号的通信来发送和接收镜头信息、控制命令等。
70.接着,将说明可更换镜头200的结构。调焦透镜201在沿光轴oa的方向(光轴方向)上移动,并且调整摄像光学系统的焦点(焦点状态)。通过镜头控制器210控制调焦控制器205,并且调焦控制器205驱动调焦透镜201。调焦控制器205向镜头控制器210输出诸如调焦透镜201的位置等的焦点信息。
71.变焦控制单元202沿光轴方向移动,并且改变摄像光学系统的焦距。通过镜头控制器210控制变焦控制器206,并且变焦控制器206驱动变焦控制单元202。变焦控制器206向镜头控制器210输出诸如焦距等的变焦信息。光圈203具有可变开口直径(f值),并且根据开口直径改变光量。通过镜头控制器210控制光圈控制器207,并且光圈控制器207驱动光圈203。光圈控制器207向镜头控制器210输出诸如f值等的光圈信息。
72.图像稳定控制透镜204沿与光轴oa垂直的方向(光轴正交方向)移动,并且降低由照相机振动或者手动模糊所导致的图像模糊。通过镜头控制器210控制图像稳定控制器209,并且图像稳定控制器209驱动图像稳定控制透镜204。图像稳定控制器209向镜头控制
器210输出诸如图像稳定范围等的图像稳定信息。
73.角速度检测器208检测可更换镜头200的角速度(横摆方向和俯仰方向上),并且将检测结果输出给镜头控制器210。通过镜头控制器210控制角速度检测器208。可以将角速度检测器设置在照相机主体100中。
74.镜头操作单元211包括调焦环、变焦环、af/mf开关、is(图像稳定)开启/关闭开关等,并且向镜头控制器210输出通过拍摄者的操作而接受的命令。系统控制器130根据拍摄者对镜头操作单元211的操作,针对可更换镜头200上所安装的各种类型的功能来切换操作模式。存储器212包括非易失性存储器。
75.控制器210根据来自镜头操作单元211或者i/f 220的输入信号,来控制调焦控制器205、变焦控制器206、光圈控制器207、图像稳定控制器209、角速度检测器208等。由此,镜头控制器210控制可更换镜头200整体。镜头控制器210响应于经由i/f 220所接收到的镜头信息获取命令,经由i/f 220将从各控制器和各检测器所输入的信息发送给照相机主体100。
76.i/f 220是用于照相机主体100和可更换镜头200之间的通信的接口。i/f220经由照相机主体100中的系统控制器130和镜头控制器210之间的连接器20,通过利用电信号的通信来发送和接收镜头信息、控制命令等。如稍后所述,i/f 220在拍摄静止图像之后将图像稳定控制结果(跟摄辅助结果)发送给照相机主体100。
77.现在,将参考图2来说明根据本实施例的照相机主体100的摄像同步通信处理。图2是在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下的照相机主体100的摄像同步通信处理的流程图。该摄像同步通信处理在实时取景摄像模式的状态下开始,从而使得镜头控制器210可以在摄像同步信号的定时与照相机主体130进行通信。
78.首先,在步骤s201中,系统控制器130判断是否继续进行实时取景摄像模式。如果继续进行实时取景摄像,则流程进入步骤s202。如果不继续进行实时取景摄像,则结束该流程的摄像同步通信处理。
79.在步骤s202中,系统控制器130判断是否输入了摄像同步信号。如果输入了摄像同步信号,则流程进入步骤s203。如果没有输入摄像同步信号,则流程返回至步骤s201。在步骤s203中,系统控制器130将摄像同步信号的输入时间作为摄像同步信号时间存储在系统控制器130中的未示出的内部存储器或者存储器107中。接着,在步骤s204中,系统控制器130判断是否存在未被处理的镜头通信。在存在未被处理的镜头通信的情况下,流程进入步骤s205。在不存在未被处理的镜头通信的情况下,流程进入步骤s206。在步骤s205中,系统控制器130完成未被处理的镜头通信,并且流程进入步骤s206。
80.在步骤s206中,系统控制器130判断是否要执行同步信号通信。如果可更换镜头200兼容跟摄辅助、并且跟摄辅助模式有效,则系统控制器130判断为将要执行同步信号通信、并且流程进入步骤s207。如果系统控制器130判断为不执行同步信号通信,则流程进入步骤s201。
81.在步骤s207中,系统控制器130测量从摄像同步信号时间起经过的时间,并且将经过时间作为延迟时间(同步信号通信延迟时间)存储在内部存储器或者存储器107中。接着,在步骤s208中,系统控制器130经由i/f 120将同步信号通信至可更换镜头200。同步信号通信中的传输数据包含同步信号延迟时间。接着,在步骤s209中,系统控制器130经由i/f 120
将镜头角速度检测时间段的设置值通信传送至可更换镜头200,并且返回至步骤s201。作为镜头角速度检测时间段的设置值通信中的传输数据,系统控制器130发送从跟摄辅助控制器134所输入的镜头角速度检测时间段的设置值。
82.通过上述处理,照相机主体100可以向可更换镜头200通知摄像同步信号,并且设置镜头角速度检测时间段。
83.现在,将参考图3来说明照相机主体100的曝光设置处理。图3是在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下的照相机主体100的曝光设置处理的操作的流程图。曝光设置处理是针对实时取景摄像模式下的各帧执行的,以用于下一帧的曝光控制。
84.首先,在步骤s301中,系统控制器130判断是否继续进行实时取景摄像。如果继续进行实时取景摄像,则流程进入步骤s302。如果不继续进行实时取景摄像,则结束该流程的曝光设置处理。
85.在步骤s302中,系统控制器130判断是否是用于下一帧的图像传感器102的曝光设置定时。如果是该曝光设置定时,则流程进入步骤s303。如果不是该曝光设置定时,则流程进入步骤s301。
86.在步骤s303中,系统控制器130基于ae控制量、照相机模式等来计算曝光设置值。系统控制器130通过将曝光设置值输出给存储器控制器105,来控制用于下一帧的曝光。接着,在步骤s304中,跟摄辅助控制器134判断是否要执行跟摄辅助处理。如果可更换镜头200兼容跟摄辅助、并且跟摄辅助模式有效,则跟摄辅助控制器134判断为要执行跟摄辅助处理,并且流程进入步骤s305。如果跟摄辅助控制器134判断为不执行跟摄辅助处理,则流程返回至步骤s301。
87.在步骤s305中,跟摄辅助控制器134基于用于下一帧的曝光设置等,来计算镜头角速度检测时间段的设置值作为从摄像同步信号起的相对时间段,从而使得运动矢量检测时间段与镜头角速度检测时间段一致。在步骤s209中,将所计算出的镜头角速度检测时间段的设置值发送给可更换镜头200。镜头角速度检测时间段的设置值包含角速度id信息。添加角度id信息以使得跟摄辅助控制器134可以识别从可更换镜头200所接收到的镜头角速度属于哪一个时间段。镜头角速度信息也包含角速度id信息,并且角速度id信息和镜头角速度信息相互标记,并且被发送给照相机主体100。
88.接着,在步骤s306中,跟摄辅助控制器134基于从可更换镜头200所接收到的诸如镜头角速度信息和焦距等的镜头信息、以及从图像处理器140所输入的运动矢量,来计算被摄体的角速度信息。被摄体的角速度信息包含被摄体角速度和被摄体角加速度。跟摄辅助控制器134将所计算出的被摄体的角速度信息输入给镜头通信控制器133。被摄体的角速度信息包含与用于该计算的镜头角速度信息相对应的镜头角速度信息获取时间。跟摄辅助控制器134经由存储器控制器105将通过图像处理器140所检测到的被摄体位置存储在存储器107中。将包含最新值的一个或多个的被摄体位置存储在存储器107中。当这些处理结束时,系统控制器130进入步骤s307。在步骤s307中,镜头通信控制器133通信被摄体角速度,以将被摄体角速度信息发送给可更换镜头200,并且进入步骤s301。在本实施例中,被摄体角速度通信中的接收数据包含镜头角速度信息。
89.通过上述处理,本实施例能够控制用于下一帧的曝光、并且能够利用下一摄像同
步信号来设置要向可更换镜头200通知的镜头角速度检测时间段。本实施例能够向可更换镜头200通知被摄体角速度,并且从可更换镜头200获得镜头角速度信息。
90.现在,将参考图4来说明照相机主体100的实时取景静止图像摄像处理。图4是照相机主体100的静止图像摄像处理(实时取景图像摄像处理)的流程图。图4示出在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下的照相机主体100的实时取景静止图像摄像处理的操作。在实时取景摄像模式下,利用经由快门开关116的静止图像拍摄开始命令开始实时取景静止图像拍摄处理。
91.首先,在步骤s401中,系统控制器130经由与镜头通信控制器133的通信,将静止图像拍摄开始定时通知给可更换镜头200。接着,在步骤s402中,系统控制器130控制快门控制器110和图像传感器102,执行静止图像曝光处理,并且获得图像数据。经由图像处理器140和存储器控制器105,将该图像数据存储在存储器107中。当结束该处理时,流程进入步骤s403。在步骤s403中,系统控制器130经由与镜头通信控制器133的通信,将静止图像拍摄结束定时通知给可更换镜头200。
92.接着,在步骤s404中,镜头通信控制器133判断是否要执行跟摄辅助处理。如果可更换镜头200兼容跟摄辅助、并且跟摄辅助模式有效,则镜头通信控制器133判断为要执行跟摄辅助处理,并且进入步骤s405。如果不执行跟摄辅助处理,则流程进入步骤s406。
93.在步骤s405中,镜头通信控制器133执行用于从可更换镜头200接收跟摄辅助结果信息的通信。这里,镜头通信控制器133(获取器)获取基于被摄体的角速度信息所执行的静止图像拍摄中的图像稳定控制结果(跟摄辅助结果)。镜头通信控制器133可以在拍摄了静止图像之后,通过与可更换镜头200的通信从可更换镜头200获得图像稳定控制结果。
94.接着,在步骤s406中,系统控制器130准备要向图像文件添加的exif信息。exif信息经由存储器控制器105而记录在存储器107中。在本实施例中,exif信息包含诸如镜头信息、快门速度和f值等的摄像条件、以及在步骤s405中所接收到的跟摄辅助结果信息。跟摄结果信息包含跟摄辅助的成功或者失败、后述的被摄体角速度v、跟摄辅助量平均值ga和平摇量平均值ga。exif信息包含在步骤s306中存储在存储器107中的最新被摄体位置。
95.接着,在步骤s407中,系统控制器130基于图像数据和exif信息,来控制图像处理器104并且准备图像文件。系统控制器130在经由存储器控制器105将图像数据存储在存储器107中之后,将图像数据存储在记录器108中。接着,在步骤s408中,系统控制器130将存储在存储器107中的图像数据显示在图像显示单元106上。在这种情况下,系统控制器130在图像(图像数据)上叠加显示图像数据的exif信息中包含的摄像条件、跟摄辅助结果和被摄体位置。稍后将参考图11来说明图像显示单元106的显示内容。
96.通过上述处理,可以从可更换镜头200获得针对曝光设置的跟摄辅助的结果,并且将跟摄辅助结果记录在所获得的图像数据中,并且将其显示在图像显示单元106上。
97.现在,将参考图5来说明通过可更换镜头200的同步信号通信中的接收处理。图5是可更换镜头200在同步信号通信中的接收处理的流程图。图5示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到同步信号通信时所开始的处理。
98.首先,在步骤s501中,镜头控制器210通过存储用于可更换镜头200中的时间控制的自由振荡计时器的当前时间来存储通信时间。该时间被存储在镜头控制器210的未示出
的内部存储器或者存储器212中。
99.接着,在步骤s502中,镜头控制器210判断是否通信了预定通信数据长度的同步信号(是否完全发送和接收了所有数据)。如果尚未完全通信(发送或者接收)所有数据,则重复步骤s502,直到完全通信了所有数据为止。如果完全通信了所有数据,则流程进入步骤s503。在步骤s503中,镜头控制器210从步骤s501中所存储的时间(开始通信的时间)减去同步信号通信的接收数据中包含的延迟时间(同步信号延迟时间段)。由此,可以计算(设置)与照相机主体100中的摄像同步信号定时一致的可更换镜头200中的摄像同步信号(镜头间摄像同步信号)的时间。
100.通过上述处理,可更换镜头200可以识别与照相机主体100中的摄像同步信号定时一致的镜头间摄像同步信号时间。
101.现在,将参考图6来说明可更换镜头200在镜头角速度检测时间段的设置值通信中的接收处理。图6是可更换镜头200在镜头角速度检测时间段的设置值通信中的接收处理的流程图。图6示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到镜头角速度检测时间段的设置值通信时所开始的处理。
102.首先,在步骤s601中,镜头控制器210判断是否通信了通信数据长度的预定镜头角速度检测时间段的设置值通信(是否完全发送和接收了所有数据)。如果尚未完全通信(发送或者接收)所有数据,则重复步骤s601,直到完全通信了所有数据为止。如果完全通信了所有数据,则流程进入步骤s602。
103.在步骤s602中,镜头控制器210基于在镜头角速度检测时间段的设置值通信中所接收到的数据中所包含的镜头角速度检测时间段和在步骤s503中所计算出的镜头间摄像同步信号的时间,来计算镜头角速度检测时间段。镜头控制器210从角速度检测器208获得镜头角速度检测时间段中的镜头角速度。镜头控制器210将镜头角速度信息获取时间、以及镜头角速度检测时间段的设置值通信中所包含的角速度id信息添加至镜头角速度信息,并且将该结果存储在内部存储器或者存储器212中。镜头控制器210将跟摄辅助有效存储在存储器212中。
104.通过上述处理,可更换镜头200可以设置与照相机主体100中的运动矢量检测时间段一致的镜头角速度检测时间段。
105.现在,将参考图7来说明可更换镜头200在被摄体角速度通信中的接收处理。图7是可更换镜头200在被摄体角速度通信中的接收处理的流程图。图7示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到被摄体角速度通信时所开始的处理。
106.首先,在步骤s701中,镜头控制器210将镜头角速度信息准备或者存储在发送缓冲器中,以将步骤s602中所存储的镜头角速度信息发送给照相机主体100。接着,在步骤s702中,镜头控制器210判断是否通信了预定通信数据长度的被摄体角速度(是否完全发送和接收了所有数据)。如果尚未完全通信(发送或者接收)所有数据,则重复步骤s702,直到完全通信了所有数据为止。如果完全通信了所有数据,则流程进入步骤s703。在步骤s703中,镜头控制器210将被摄体角速度信息存储在内部存储器或者存储器212中,以准备曝光开始定时。
107.通过上述处理,可更换镜头200可以设置与照相机主体100的运动矢量检测时间段
一致的镜头角速度检测时间段。
108.现在,将参考图8来说明可更换镜头200在静止图像拍摄开始定时通信中的接收处理。图8是可更换镜头200的静止图像拍摄开始定时通信中的接收处理的流程图。图8是本实施例中的当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到静止图像拍摄开始定时通信时所开始的处理。
109.首先,在步骤s801中,镜头控制器210判断静止图像拍摄是否需要跟摄辅助处理。更具体地,镜头控制器210通过参考步骤s602中所写入的存储器212中的区域来进行该判断。如果要执行跟摄辅助处理,则流程进入步骤s802。如果不执行跟摄辅助处理,则流程进入步骤s808。
110.在步骤s802中,镜头控制器201(预测器)基于当前时间和步骤s703中所存储的被摄体角速度信息,来预测当前时间的被摄体角速度(计算拍摄静止图像之前的被摄体的预测角速度)。镜头控制器210进行通过下面的表达式(1)所表示的预测计算,其中,t是当前时间,v是当前时间t的被摄体角速度,v、a和t是被摄体角速度信息中所包含的被摄体角速度、被摄体角加速度和镜头角速度信息获取时间,但是预测计算不局限于表达式(1),并且可以使用其它表达式或者方法。
111.v=v+a*(t
‑
t)
ꢀꢀꢀ
(1)
112.接着,在步骤s803中,镜头控制器210(图像稳定控制器)通过使用当前时间的被摄体的角速度信息来控制图像稳定控制器209,并且执行跟摄辅助处理。换句话说,镜头控制器210通过使用基于角速度检测器208所检测到的角速度和运动矢量检测器141所检测到的运动矢量所计算出的被摄体角速度信息,来控制拍摄静止图像时的图像稳定。例如,镜头控制器210进行如下面的表达式(2)所表示的计算,其中,g是跟摄辅助量,以及g是在拍摄静止图像时角速度检测器208所检测到的平摇量,但是跟摄辅助量g的计算方法不局限于该例子。在拍摄静止图像时,可以通过根据跟摄辅助量控制图像稳定控制透镜204来保持运动被摄体静止。
113.g=v
‑
g
ꢀꢀꢀ
(2)
114.在步骤s803中,镜头控制器210判断是否继续进行静止图像拍摄。更具体地,如果在步骤s403中照相机主体100尚未接收到静止图像拍摄结束定时通信,则镜头控制器210判断为继续进行静止图像拍摄。如果继续进行静止图像拍摄,则流程进入步骤s804。如果没有拍摄静止图像,则流程进入步骤s807。
115.在步骤s804中,镜头控制器210经由图像稳定控制器209判断辅助量是否在图像稳定控制透镜204的可移动范围内(图像稳定透镜204在拍摄静止图像时是否超出了可移动范围或者到达图像稳定控制端)。如果辅助量在图像稳定控制透镜204的可移动范围内(如果图像稳定控制透镜204没有超出可移动范围),则流程进入步骤s805。在图像稳定控制透镜204位于可移动范围外(如果图像稳定控制透镜204超出了可移动范围)的情况下,流程进入步骤s806。
116.在步骤s805中,镜头控制器210执行跟摄辅助处理。更具体地,镜头控制器210从角速度检测器208获得平摇量g,并且通过使用表达式(2)来计算跟摄辅助量g。镜头控制器210经由图像稳定控制器209,通过跟摄辅助量g来控制图像稳定控制透镜204。镜头控制器210将跟摄辅助量g和平摇量g存储在存储器212中。在执行了步骤s805之后,流程返回至步骤
s803。
117.在步骤s806中,镜头控制器210将失败作为跟摄辅助结果存储在存储器212中。镜头控制器210基于在步骤s802中所计算出的被摄体角速度v以及在步骤s805中所存储的跟摄辅助量g和平摇量g,来计算作为平均值的跟摄辅助量平均值ga和平摇量平均值ga。镜头控制器210将跟摄辅助量平均值ga和平摇量平均值ga与跟摄辅助结果一起存储在存储器212中。
118.在步骤s807中,镜头控制器210将成功作为跟摄辅助结果存储在存储器212中。镜头控制器210基于在步骤s802中所计算出的被摄体角速度v以及在步骤s805中所存储的跟摄辅助量g和平摇量g,来计算作为平均值的跟摄辅助量平均值ga和平摇量平均值ga。镜头控制器210将跟摄辅助量平均值ga和平摇量平均值ga与跟摄辅助结果一起存储在存储器212中。
119.在步骤s808中,镜头控制器210通过仅利用角速度检测器208所检测到的角速度(手动振动量)的图像稳定处理来执行正常图像稳定。
120.通过上述处理,可更换镜头200能够将针对静止图像拍摄(曝光)设置的跟摄辅助的结果发送给照相机主体100,并且照相机主体100可以将跟摄辅助结果记录在所获取到的图像数据中。
121.现在,将参考图9来说明可更换镜头200在跟摄辅助结果通信中的接收处理。图9是可更换镜头200在跟摄辅助结果通信中的接收处理的流程图。图9示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到跟摄辅助结果通信时所开始的处理。
122.首先,在步骤s901中,镜头控制器120将跟摄辅助结果准备或者存储在发送缓冲器中,以将在步骤s802中所预测计算出的诸如被摄体角速度等的跟摄辅助结果发送给照相机主体100。接着,在步骤s902中,镜头控制器210判断是否通信了预定通信数据长度的被摄体角速度(是否完全发送和接收了所有数据)。在尚未完全通信(发送或者接收)所有数据的情况下,重复步骤s902,直到完全通信了所有数据为止。在完全通信了所有数据的情况下,结束该流程的接收处理。
123.通过上述处理,可更换镜头200能够将跟摄辅助结果、被摄体角速度v、跟摄辅助量平均值ga和平摇量平均值ga发送给照相机主体100。
124.现在,将参考图10来说明照相机系统10(其包括照相机主体100和可更换镜头200)的跟摄辅助处理。图10是照相机系统10的跟摄辅助处理的时序图。
125.图10示出在所安装的可更换镜头200兼容跟摄辅助的情况下、在跟摄辅助模式和实时取景摄像模式下的照相机系统10的处理时序。
126.摄像同步信号1001是来自定时发生器104的同步信号输出。摄像累积1002是图像传感器102中的累积时间段,并且响应于摄像同步信号1001而按从图像的上部起的顺序读取电荷。同步信号通信1003表示在图2的步骤s208中所执行的同步信号通信的定时。镜头角速度检测时间段的设置值通信1004表示在图2的步骤s209中所执行的镜头角速度检测时间段的设置值通信的定时。
127.被摄体角速度通信1005表示在图3的步骤s307中所执行的被摄体角速度通信的定时。静止图像拍摄开始定时通信1006表示用于在图4的步骤s401中所执行的静止图像拍摄
开始定时通信的定时。跟摄辅助结果通信1007表示用于在图4的步骤s405中所执行的跟摄辅助结果通信的定时。释放定时1018表示拍摄者经由快门开关116发出释放命令的定时。
128.镜头角速度检测时间段1008表示在图6的步骤s602中所设置的镜头角速度检测时间段。当镜头角速度检测时间段过去时,镜头控制器210计算与该时间段相对应的镜头角速度,将镜头角速度信息获取时间、以及镜头角速度检测时间段的设置值通信中所包含的角速度id信息添加给镜头角速度信息,并且存储该结果。角速度输出1009表示来自角速度检测器208的输出。镜头控制器210在镜头角速度检测时间段1008内对角速度输出1009进行采样。
129.响应于摄像同步信号1010,开始同步信号通信1011,并且镜头控制器210计算与摄像同步信号1010相对应的镜头间摄像同步信号时间。此后,通过镜头角速度检测时间段1012的设置值通信,来将使得运动矢量检测时间段1013与镜头角速度检测时间段1014一致的方式所计算出的镜头角速度检测时间段的设置值发送给可更换镜头200。被摄体角速度通信1015将在镜头角速度检测时间段1014结束时所获得的镜头角速度信息通知给照相机主体100。跟摄辅助控制器134基于该镜头角速度信息和在运动矢量检测时间段1013所获得的运动矢量信息,来计算被摄体角速度信息。
130.响应于释放定时1019,系统控制器130在当前曝光结束之后结束与同步信号相关联的曝光。在针对快门101和图像传感器102准备了静止图像拍摄之后,系统控制器130执行静止图像拍摄开始定时通信1016。同时,驱动快门101以开始拍摄静止图像。当通过拍摄者所指示的快门速度时间过去时,系统控制器130通过驱动快门101来停止曝光。此后,系统控制器130执行跟摄辅助结果通信1017。
131.现在,将参考图11来说明在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下的步骤s408中的拍摄图像的显示方法。图11示出在照相机主体100中的图像显示单元106上的所显示的作为拍摄者利用跟摄辅助来跟摄被摄体1101的结果的示例性拍摄图像(静止图像)。
132.系统控制器130基于存储在exif信息中的被摄体位置来显示被摄体位置框1102(与静止图像中的被摄体位置有关的信息)。系统控制器130基于存储在exif信息中的跟摄辅助结果,来显示表示跟摄辅助成功或者失败的跟摄结果1103(与图像稳定控制结果有关的信息)。这里,跟摄结果1103示出跟摄辅助失败(
“×”
标记)。在跟摄结果1103示出跟摄辅助成功的情况下,显示表示成功的
“○”
标记。跟摄结果1103例如是用于表示图像稳定控制透镜204在拍摄静止图像时是否超出了可移动范围(图像稳定控制透镜204是否到达图像稳定控制端)的信息。
133.系统控制器130基于存储在exif信息中的被摄体角速度v,来显示被摄体移动方向1104(与被摄体的预测角速度有关的信息)。系统控制器130基于存储在exif信息中的平摇量平均值ga,来显示平摇方向1105(与拍摄静止图像时的角速度有关的信息)。此时,以与角速度的绝对值成比例的箭头大小来显示被摄体移动方向1104和平摇方向1105。由于被摄体位置被叠加显示在拍摄图像上,因而拍摄者可以确认跟摄辅助是否被应用于拍摄者意图的被摄体。如果在被摄体移动方向1104和平摇方向1105之间存在大的偏移,则拍摄者能够识别为要校正平摇方向和速度。
134.本实施例仅在拍摄图像之后的预定时间段内在图像显示单元106上显示叠加在拍
摄图像上的跟摄辅助结果。然而,本实施例不局限于该例子,并且可适用于紧接着拍摄图像之后从记录器108读取该拍摄图像的情况。
135.尽管本实施例讨论了被叠加在拍摄图像上的被摄体移动方向1104和拍摄者平摇方向1105,但是拍摄者可以基于跟摄辅助量平均值ga来显示平摇方向的校正方向。平摇方向的校正方向与跟摄辅助量g为0的方向一致。
136.如果跟摄拍摄无法提供漂亮的图像,则本实施例可以判断是拍摄者不适当地平摇了照相机还是照相机错认了被摄体。如果拍摄者不适当地平摇了照相机,则可以向拍摄者反馈用于改善平摇方向的方式。
137.第二实施例
138.接着,将说明根据本发明的第二实施例。第一实施例在拍摄静止图像时突然停止移动超出了图像稳定可移动范围的图像稳定控制透镜204。另一方面,本实施例在跟摄辅助量g变得大得超出图像稳定可移动范围的情况下再次计算并降低跟摄量。在本实施例中,照相机系统的结构、照相机主体100的控制流程和可更换镜头200的部分控制流程与第一实施例相同。因此,将省略对其的说明。本实施例讨论可更换镜头200的控制流程中与第一实施例的静止图像拍摄开始定时通信不同的静止图像拍摄开始定时通信的控制流程。
139.现在,将参考图12来说明可更换镜头200在静止图像拍摄开始定时通信中的接收处理。图12是可更换镜头200在静止图像拍摄开始定时通信中的接收处理的流程图。图12示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收静止图像拍摄开始定时通信时所开始的处理。图12与图8的不同在于具有步骤s1203、s1204和s1209。图12中的步骤s1201、s1202、s1205~s1208、s1210和s1211与图8中的步骤s801~s808相同,并且将省略对其的说明。
140.在步骤s1203中,镜头控制器210确认(判断)作为通过将估计跟摄辅助量gs除以快门速度tv所获得的值的秒间跟摄辅助量是否等于或者高于预定阈值。估计跟摄辅助量gs与例如利用表达式(2)所计算出的跟摄辅助量g相对应。如果秒间跟摄辅助量等于或者大于预定阈值,则流程进入步骤s1204。如果秒间跟摄辅助量小于预定阈值,则流程进入步骤s1205。
141.在步骤s1204中,镜头控制器210使用下面的表达式(3)再次计算被摄体角速度v,以使得秒间跟摄辅助量变得等于或者低于阈值gb。
142.gs/tv=(g
‑
v)/tv<gb
ꢀ…ꢀ
(3)
143.在步骤s1207中,镜头控制器210从角速度检测器208获得平摇量g,并且使用表达式(2)计算跟摄辅助量g。此时,如果流程经过步骤s1204(如果再次计算被摄体角速度v),则使用再次计算出的被摄体角速度v。
144.在步骤s1209中,镜头控制器210判断流程是否经过了步骤s1204(是否再次计算了被摄体角速度v)。如果流程经过了步骤s1204,则流程进入步骤s1208。如果流程没有经过步骤s1204,则流程进入步骤s1210。
145.如果跟摄辅助量g大得超出了图像稳定可移动范围,则本实施例再次计算被摄体角速度以降低跟摄辅助量、并且将跟摄拍摄结果反馈给拍摄者。在跟摄辅助失败的情况下,第一实施例突然停止跟摄辅助控制,而本实施例应用缓和的跟摄辅助控制、并且抑制不自然地拍摄静止图像。
146.第三实施例
147.根据本发明的第三实施例的照相机系统与图1所述的照相机系统相同,并且将省略对其的说明。
148.根据本实施例的照相机主体100的摄像同步通信处理与图2所示的摄像同步通信处理相同,并且将省略对其的说明。
149.现在,将参考图13来说明照相机主体100的曝光设置处理。图13是在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下照相机主体100的曝光设置处理的流程图。该曝光设置处理在实时取景摄像模式下针对每一帧开始,并且控制下一帧的曝光。
150.在步骤s1301中,系统控制器130判断是否继续进行实时取景摄像。如果继续进行实时取景摄像,则流程进入步骤s1302。如果不继续进行实时取景摄像,则结束该流程的曝光设置处理。
151.在步骤s1302中,系统控制器130判断是否是用于下一帧的图像传感器102的曝光设置定时。如果是曝光设置定时,则流程进入步骤s1303。如果不是曝光设置定时,则流程返回至步骤s1301。
152.在步骤s1303中,系统控制器130基于ae控制量、照相机模式等来计算曝光设置值。系统控制器130通过将曝光设置值输出给存储器控制器105来控制用于下一帧的曝光。接着,在步骤s1304中,跟摄辅助控制器134判断是否要执行跟摄辅助处理。如果可更换镜头200兼容跟摄辅助、并且跟摄辅助模式有效,则跟摄辅助控制器134判断为要执行跟摄辅助处理,并且进入步骤s1305。如果跟摄辅助控制器134判断为不执行跟摄辅助处理,则流程返回至步骤s1301。
153.在步骤s1305中,跟摄辅助控制器134基于用于下一帧的曝光设置等,来计算镜头角速度检测时间段的设置值作为从摄像同步信号开始的相对时间段,以使得运动矢量检测时间段与角速度检测时间段一致(相对应)。在上述步骤s209中,将所计算出的角速度检测时间段的设置值发送给可更换镜头200。
154.接着,在步骤s1306中,跟摄辅助控制器134基于从照相机主体100发送给可更换镜头200的镜头角速度检测时间段的设置值,来获得角速度检测器208所检测到的角速度和来自可更换镜头200的角速度检测时间信息。如图19所述,在步骤s1306中所获得的角速度信息是与用于上一帧的运动矢量检测时间段一致(相对应)的角速度检测时间段的角速度信息。跟摄辅助控制器134从可更换镜头200相互关联地接收(获得)角速度信息(镜头角速度)和角速度检测时间信息(镜头角速度检测时间)。例如,如表1所示的通信命令,诸如镜头通信控制器133和i/f 120等的跟摄辅助控制器134从同一通信数据包接收(获得)镜头角速度和镜头角度检测时间。换句话说,镜头控制器210(i/f 220)通过同一通信数据包发送镜头角速度和镜头角速度检测时间。
155.表1
156.157.接着,在步骤s1307中,跟摄辅助控制器134计算被摄体的角速度信息(包含被摄体角速度和被摄体角加速度)。基于在步骤s1306中从可更换镜头200所获得的角速度信息、角速度检测时间信息、诸如焦距等的镜头信息、从图像传感器140所输入的运动矢量等,来计算被摄体角速度信息。跟摄辅助控制器134将所计算出的被摄体角速度信息输出给镜头通信控制器133。
158.接着,在步骤s1308中,镜头通信控制器133执行被摄体角速度通信,以将被摄体角速度信息发送给可更换镜头200。在本实施例中,跟摄辅助控制器134(镜头通信控制器133)将与在步骤s1306从可更换镜头200所获得的角速度信息获取时间相关联的被摄体角速度信息发送给可更换镜头200。在这种情况下,跟摄辅助控制器134向可更换镜头200相互关联地发送被摄体角速度信息(被摄体角速度)和角速度检测时间信息(镜头角速度检测时间)。例如,如表2所示的通信命令,跟摄辅助控制器134通过同一通信数据包发送被摄体角速度和镜头角速度检测时间。换句话说,镜头控制器210(i/f 220)通过同一通信数据包接收(获得)被摄体角速度和镜头角速度检测时间。
159.表2
[0160][0161]
当步骤s1308中的被摄体角速度通信结束时,流程返回至步骤s1301。
[0162]
通过上述处理,可以控制用于下一帧的曝光,并且下一摄像同步信号能够设置要通知给可更换镜头200的镜头角速度检测时间段。本实施例可以向可更换镜头200通知被摄体角速度,并且从可更换镜头200获得角速度信息。
[0163]
现在,将参考图14来说明照相机主体100的曝光处理。图14是照相机主体100的曝光处理的流程图。图14示出在所安装的可更换镜头200兼容跟摄辅助的情况下、在实时取景摄像模式下的照相机主体100的实时取景曝光处理的操作。在实时取景摄像模式下,利用经由快门开关116(sw2)的曝光开始命令开始该实时取景曝光处理。
[0164]
首先,在步骤s1401中,系统控制器130经由与镜头通信控制器133的通信,将曝光开始定时(摄像开始定时)通知给可更换镜头200。接着,在步骤s1402中,系统控制器130控制快门控制器110和图像传感器102,执行曝光处理,并且获得图像数据。经由图像处理器140和存储器控制器105,将该图像数据存储在存储器107中。
[0165]
接着,在步骤s1403中,镜头通信控制器133判断是否要执行跟摄辅助处理。如果可更换镜头200兼容跟摄辅助、并且跟摄辅助模式有效,则镜头通信控制器1330判断为要执行跟摄辅助模式,并且进入步骤s1404。如果不执行跟摄辅助处理,则流程进入步骤s1405。
[0166]
在步骤s1404中,镜头通信控制器133执行通信以从可更换镜头200接收跟摄辅助结果信息。在步骤s1405中,系统控制器130准备要添加至图像文件的exif信息。exif信息经由存储器控制器105而记录在存储器107中。在本实施例中,exif信息包含诸如镜头信息、快门速度和f值等的摄像条件(照相机模式)、以及在步骤s1404中所接收到的跟摄辅助结果信息。
[0167]
接着,在步骤s1406中,系统控制器130基于图像数据和exif信息,来控制图像处理
器140并且准备图像文件。系统控制器130经由存储器控制器105将图像数据存储在存储器107中,并且将图像数据记录在记录器108中。
[0168]
通过上述处理,可以从可更换镜头200获得在曝光时所进行的跟摄辅助的结果,并且可以将跟摄辅助结果记录在所获得的图像数据中,或者将跟摄辅助结果显示在图像显示单元106上。
[0169]
当将镜头角速度检测时间段的设置值从照相机主体100发送给可更换镜头200时,照相机主体100的运动矢量检测时间段能够与可更换镜头200的角速度检测时间段在定时上一致。利用角速度信息的检测时间来标记可更换镜头200所检测到的角速度信息(或者将可更换镜头200所检测到的角速度信息与角速度信息的检测时间相关联),并且将其发送给照相机主体100。利用基于角速度信息和运动矢量检测信息所计算出的被摄体角速度信息来标记角速度信息的检测时间(或者将角速度信息的检测时间与基于角速度信息和运动矢量检测信息所计算出的被摄体角速度信息相关联),并且将其发送给可更换镜头200。由此,在后述的实时取景释放曝光处理中,可以对图像稳定控制器209进行控制,以正确控制曝光时的被摄体的移动量。换句话说,即使在尚未完成向照相机主体100的角速度信息的发送和从照相机主体100的被摄体的角速度信息的发送处理的情况下请求了实时取景释放曝光处理,也可以进行适当校正。即使在假定定时尚未完成跟摄辅助通信的情况下请求了实时取景释放曝光处理,也可以进行适当校正。
[0170]
由于通过可更换镜头200在同步信号通信中的接收处理与参考图5所述的接收处理相同,因而将省略对其的说明。
[0171]
现在,将参考图15来说明可更换镜头200在镜头角速度检测时间段的设置值通信中的接收处理。图15是可更换镜头200在镜头镜头角速度检测时间段的设置值通信中的接收处理的流程图。图15是当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收镜头角速度检测时间段的设置值通信时所开始的处理。
[0172]
首先,在步骤s1501中,镜头控制器210判断是否通信了通信数据长度的预定镜头角速度检测时间段的设置值通信(是否完全发送和接收了所有数据)。在没有完全通信(发送和接收)了所有数据的情况下,重复步骤s1501,直到完全通信了所有数据为止。在完全通信了所有数据的情况下,流程进入步骤s1502。
[0173]
在步骤s1502中,镜头控制器210基于在镜头角速度检测时间段的设置值通信中所接收到的数据中所包含的镜头角速度检测时间段、以及在步骤s503中所计算出的镜头间摄像同步信号的时间,来设置镜头角速度检测时间段。换句话说,当镜头角速度检测时间段(角速度检测器208检测角速度的时间段)结束时,镜头控制器210从角速度检测器208获得镜头角速度检测时间段的角速度。
[0174]
接着,在步骤s1503中,镜头控制器210存储角速度检测器208检测到角速度时的时间信息(镜头角速度检测时间)。镜头角速度检测时间被存储在例如镜头控制器210中的(未示出的)内部存储器或者存储器212中。更具体地,镜头控制器210存储用于控制可更换镜头200中的时间的自由振荡计时器的当前时间。所存储的时间(时间信息)可以是通过从照相机主体100所发送的镜头角速度检测时间段的设置值所指定的时间段的中间时间。然而,本实施例不局限于该例子,并且可以是通过镜头角速度检测时间段的设置值所指定的时间段的开始时间或者结束时间。
[0175]
通过上述处理,可更换镜头200可以设置与照相机主体100中的运动矢量检测时间段一致的镜头角速度检测时间段。
[0176]
现在,将参考图16来说明可更换镜头200在被摄体角速度通信中的接收处理。图16是可更换镜头200在被摄体角速度通信的接收处理的流程图。图16是当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到被摄体角度通信时所开始的处理。
[0177]
首先,在步骤s1601中,镜头控制器210将在步骤s1502所存储的角度信息(镜头角速度)和在步骤s1503所存储的角度检测时间信息(镜头角速度检测时间)发送给照相机主体100。因此,镜头控制器210将该信息(数据)存储在发送缓冲器中。
[0178]
接着,在步骤s1602中,镜头控制器210判断是否通信了预定通信数据长度的被摄体角速度通信(是否完全发送和接收了所有数据)。在尚未完全通信(发送和接收)所有数据的情况下,重复步骤s1602,直到完全通信了所有数据为止。在完全通信了所有数据的情况下,流程进入步骤s1603。
[0179]
接着,在步骤s1603中,镜头控制器210将在步骤s1601中所准备的角速度信息以及角速度检测时间信息发送给照相机主体100。接着,在步骤s1604中,镜头控制器210将被摄体角速度信息和角速度检测时间信息存储在跟摄辅助控制器134中,以对来自照相机主体100的实时取景释放曝光处理的请求进行准备。如稍后参考图19所述,在步骤s1603中从照相机主体100所接收到的镜头角速度检测时间是与可更换镜头200在步骤s1503中所存储的与角速度信息相关联的发送给照相机主体100的角速度检测时间信息。
[0180]
由于可更换镜头200向照相机主体100发送角速度信息以及照相机主体100向可更换镜头200发送被摄体角速度信息的一系列通信处理与实时取景释放曝光处理不同步,因而可更换镜头200将角速度信息的检测时间发送给照相机主体100、并且照相机主体100再次将其发送给可更换镜头200。即使在尚未完成这一系列通信处理的情况下,也必须实现实时取景释放曝光处理中的跟摄辅助操作。本实施例的结构能够保证用于计算图像稳定控制器209校正曝光时的被摄体的移动量所依据的驱动量的被摄体角速度信息与作为预测基准时间的镜头角速度检测时间同步。稍后将参考时序图来说明被摄体角速度信息可能与作为预测基准时间的镜头角速度检测时间不同步的非通常的情况。
[0181]
本实施例将从可更换镜头200向照相机主体100所发送的镜头角速度信息通信和从照相机主体100向可更换镜头200发送的被摄体角速度信息描述为分开的通信处理,但是,本实施例不局限于该例子。本实施例可以将数据格式定义为全双工通信,并且执行一个通信处理。
[0182]
通过上述处理,可更换镜头200能够设置与照相机主体100的运动矢量检测时间段一致的镜头角速度检测时间段,并且可以从照相机主体100获得被摄体角速度信息。
[0183]
现在,将参考图17来说明通过可更换镜头200在曝光开始定时通信中的接收处理。图17是可更换镜头200在曝光开始定时通信中的接收处理的流程图。图17示出当在实时取景摄像模式下、兼容跟摄辅助的可更换镜头200从照相机主体100接收到曝光开始定时通信时所开始的处理。
[0184]
首先,在步骤s1701中,镜头控制器210判断曝光是否需要跟摄辅助处理。例如,镜头控制器210通过参考在步骤s1502所写入的存储器212的区域来进行该判断。在要执行跟
摄辅助处理的情况下,流程进入步骤s1702。在不执行跟摄辅助处理的情况下,流程进入步骤s1704。
[0185]
在步骤s1702中,镜头控制器210(计算器)基于角速度检测时间信息和在步骤s1603中所存储的被摄体角速度信息,来预测当前时间的被摄体角速度。换句话说,镜头控制器210计算被摄体的预测角速度。镜头控制器210进行通过如表达式(1)所表示的预测计算,其中,t是当前时间,以及v是当前时间t的被摄体角速度。
[0186]
在表达式(1)中,“ν”是通过照相机主体100在步骤s306中所获得的、在步骤s1603中从可更换镜头200发送给照相机主体100的被摄体角速度(被摄体角速度信息),“a”是通过照相机主体100在步骤s306中所获得的被摄体角加速度(被摄体角加速度信息),以及“t”是通过照相机主体100在步骤s1306中所获得的角速度信息获取时间(镜头角速度信息获取时间)。然而,该预测计算不局限于表达式(1),并且可以使用其它表达式或者其它方法。
[0187]
接着,在步骤s1703中,镜头控制器210通过使用当前时间的被摄体角速度v来控制图像稳定控制器209,并且执行跟摄辅助处理。例如,镜头控制器210从角速度检测器208获得图像稳定量(平摇量)g,并且利用表达式(2)计算跟摄辅助图像稳定量g,但是跟摄辅助量g的计算方法不局限于该计算。通过控制图像稳定控制透镜204以在抵消曝光时的跟摄辅助图像稳定量,可以保持运动被摄体静止。
[0188]
在步骤s1704中,镜头控制器210仅利用来自角速度检测器208的图像稳定量来进行图像稳定处理(图像稳定控制),由此进行通常的图像稳定校正。
[0189]
通过上述处理,可更换镜头200可以将在曝光时所进行的跟摄辅助的结果发送给照相机主体100,并且照相机主体100可以将所获取到的图像数据记录在跟摄辅助结果中。
[0190]
通过可更换镜头200在跟摄辅助结果通信中的接收处理与图9所述的接收处理相同,并且将省略对其的说明。
[0191]
通过图9中的处理,可更换镜头200可以获得反映从获得镜头角速度检测时间起到曝光开始时所经过的时间的被摄体角速度,并且可以进行精确的跟摄辅助。
[0192]
现在,将参考图18a来说明照相机系统10(其包括照相机主体100和可更换镜头200)。图18a是照相机系统10的跟摄辅助处理的时序图。图18a示出在所安装的可更换镜头200兼容跟摄辅助的情况下、在跟摄辅助模式和实时取景摄像模式下的照相机系统10的处理时序。
[0193]
摄像同步信号2001是从定时发生器104所输出的同步信号。摄像累积2002表示图像传感器102的累积时间段,并且响应于摄像同步信号2001而按从图像的上部的顺序起读取电荷。同步信号通信2003表示图2的步骤s208中的同步信号通信的定时。镜头角速度检测时间段的设置值通信2004表示用于图2的步骤s209中的镜头角速度检测时间段的设置值通信的定时。
[0194]
镜头角速度通信2005表示图16的步骤s1603中的镜头角速度通信的定时。被摄体角速度通信2006表示图16的步骤s1604中的被摄体角速度通信的定时。曝光定时通信2007表示图14的步骤s1401中的跟摄辅助结果通信的定时。镜头角速度检测时间段2008表示在图15的步骤s1502中所设置的镜头角速度检测时间段。当镜头角速度检测时间段结束时,计算与该时间段相对应的镜头角速度,并且存储利用镜头角速度信息获取时间所标记的镜头角速度信息(或者与镜头角速度信息获取时间相关联的镜头角速度信息)。
[0195]
角速度输出2009表示来自角速度检测器208的输出。镜头控制器210在镜头角速度检测时间段2008对角速度输出2009进行采样。跟摄辅助曝光中的被摄体移动校正量预测2010表示在图17的步骤s1702中所执行的处理中的基准时间(或者镜头角速度信息获取时间t),其中,该处理用于利用预测表达式来计算图像稳定控制器209的驱动量,以校正曝光时的被摄体移动量。跟摄辅助校正处理2011表示在图17的步骤s1703中所执行的图像稳定控制器209的控制时间段。
[0196]
现在,将说明实时取景释放曝光处理中的跟摄辅助处理的基本序列。例如,响应于摄像同步信号2012,执行同步信号通信2013,并且镜头控制器210计算与摄像同步信号2012一致的镜头间摄像同步信号时间。此后,执行镜头角速度检测时间段的设置值通信2014。由此,将镜头角速度检测时间段的设置值2015作为与照相机主体100的运动矢量检测时间段和运动矢量检测时间段2016的开始定时相对应的时间信息发送给可更换镜头200。镜头控制器210设置镜头角速度检测时间段2017。镜头控制器210将镜头角速度检测时间段2017的重心时间的时间信息存储为镜头角速度检测时间。镜头角速度通信2018将在镜头角速度检测时间段2017结束之后所获得的镜头角速度检测时间和镜头角速度信息通知给照相机主体100。
[0197]
照相机主体100在接收到镜头角速度信息时,基于在运动矢量检测时间段2016所检测到的运动矢量信息和从可更换镜头200所接收到的镜头角速度信息来生成被摄体角速度信息。被摄体角速度通信2019将所生成的镜头角速度信息通知给照相机主体100。除非拍摄者请求实时取景释放曝光处理,否则照相机主体100重复上述处理,并且连续向可更换镜头200发送正确的被摄体角速度信息。
[0198]
现在,将说明在拍摄者在实时取景释放曝光处理请求2020的定时按下快门开关116时的实时取景释放曝光处理。附图标记2021表示用于静止图像拍摄的实时取景释放曝光处理。照相机主体100在实时取景释放曝光处理2021之前的预定时间段2022的定时,执行曝光定时通信2023。由此,照相机主体100向可更换镜头200发送用于静止图像拍摄的实时取景释放曝光处理的开始定时。尽管该通信处理通知曝光定时,但是定时通知方法不局限于该通信。
[0199]
当接收到曝光定时通信2007时,跟摄辅助控制器134在时间段2024计算实时取景释放曝光处理的被摄体的移动量或者曝光时用于驱动图像稳定控制器209的校正量。这里所使用的计算表达式是参考图17的步骤s1702所述的表达式(1)。在表达式(1)中,当前时间t与作为通过从曝光定时通信2007的接收时间与到曝光开始的预定时间段2022相加所得出的时间的曝光开始定时时间相对应。另外,“ν”是在镜头角速度检测时间段2017所获得的镜头角速度信息,“a”是被摄体角速度通信2019通知给可更换镜头200的被摄体角速度,以及“t”是镜头角速度信息获取时间2025。在实时取景释放曝光处理时间段2027中移动图像稳定控制器209,以在通过虚线2026所示的时间段内校正被摄体的移动量。将参考图19来说明用于在所述实时取景释放曝光处理中计算跟摄校正量的方法。
[0200]
为了实现跟摄辅助功能,基于可更换镜头200的角速度检测信息和照相机主体100的运动矢量检测信息来生成被摄体角速度信息,并且将被摄体角速度信息发送给可更换镜头200。由此,响应于实时取景释放曝光处理请求1020,可以计算移动被摄体直到曝光为止的校正量。
[0201]
图18a示出当完成了照相机主体100和可更换镜头200之间的一系列信息交换时发生实时取景释放曝光处理请求1020的情况。现在,将参考图18b来说明下面的情况:在将被摄体角速度信息从照相机主体100发生给可更换镜头200之前,发生了实时取景释放曝光处理请求。
[0202]
在图18b中,附图标记2001~2018与图18a中的附图标记2001~2018相同,并且镜头角速度通信2018将镜头角速度信息和镜头角速度检测时间通知给照相机主体100。
[0203]
照相机主体100基于运动矢量检测时间段2016所检测到的运动矢量信息和在镜头角速度检测时间段2017所检测到的角速度信息,来向可更换镜头200发送被摄体角速度信息。在图18b中,在传送被摄体角速度信息之前,发生了实时取景释放曝光处理请求2020。在这种情况下,基于前一摄像同步信号中的信息,来进行实时取景释放曝光处理请求2020中的跟摄辅助处理。换句话说,可更换镜头200基于在通过虚线所示的镜头角速度检测时间段2029所检测到的角速度信息,通过镜头角速度通信2030来将镜头角速度信息和镜头角速度检测时间通知给照相机主体100。照相机主体100基于在通过虚线所示的运动矢量检测时间段2028中所检测到的运动矢量信息和在通过虚线所示的镜头角速度检测时间段2029中所检测到的角速度信息,来生成被摄体角速度信息。照相机主体100通过被摄体角速度通信2031来将所生成的被摄体角速度信息通知给可更换镜头200。此时,将镜头角速度检测(获取)时间2032存储在被摄体角速度通信2031中。因此,跟摄辅助控制器134不必针对每一摄像同步信号处理存储镜头角速度信息获取时间。换句话说,跟摄辅助控制器134可以利用表达式(1)和仅在被摄体角速度通信2031中所接收到的信息,来计算实时取景释放曝光处理中的图像稳定控制器209的驱动量。
[0204]
在图18a中,在预定摄像同步信号时间段内,完成照相机主体100和可更换镜头200之间的一系列信息交换。然而,除跟摄辅助通信以外,在照相机主体100和可更换镜头200之间还进行诸如af和ae等的其它通信处理。因此,在进行除跟摄辅助通信以外的通信时,可能无法确保通信频带,例如,镜头角速度通信2018或者被摄体角速度通信2019可能在预定摄像同步信号时间段内无法完成,并且可能移动至下一摄像同步信号时间段。现在,将参考图18c说明这种情况。
[0205]
图18c示出作为在预定摄像同步信号时间段内无法完成被摄体角速度通信2033的结果的、在下一摄像同步信号时间段的处理。在图18c中,在被摄体角速度通信2033被处理之前,发生了实时取景释放曝光处理请求2020。在这种情况下,为了转变成实时取景释放曝光处理,不执行通过斜线所示的被摄体角速度通信2033。因此,通过实时取景释放曝光处理请求2020,基于前一摄像同步信号中的信息来进行跟摄辅助处理。换句话说,可更换镜头200基于在通过虚线所示的镜头角速度检测时间段2029所检测到的角速度信息,通过镜头角速度通信2030来将镜头角速度信息和镜头角速度检测时间通知给照相机主体100。照相机主体100基于在通过虚线所示的运动矢量检测时间段2028中所检测到的运动矢量信息和在通过虚线所示的镜头角速度检测时间段2029中所检测到的角速度信息,来生成被摄体角速度信息。照相机主体通过被摄体角速度通信2031,来将所生成的被摄体角速度信息通知给可更换镜头200。此时,将镜头角速度检测时间2032存储在被摄体角速度通信2031中。因此,跟摄辅助控制器134不必针对每一摄像同步信号处理存储镜头角速度信息获取时间。换句话说,跟摄辅助控制器134可以利用表达式(1)和仅在被摄体角速度通信2031中所接收到
的信息,来计算实时取景释放曝光处理中的图像稳定控制器209的驱动量。
[0206]
尽管本实施例将镜头角速度通信2005和被摄体角速度通信2006表现为单独的通信,但是本实施例可以将数据格式定义为全双工通信,并且执行一个通信处理。
[0207]
现在,将参考图19来说明在曝光时用于图像稳定控制器209的驱动量计算方法。图19是在曝光时用于图像稳定控制器209的驱动量计算方法的说明图。在图19中,纵轴表示被摄体角速度,以及横轴表示时间(时间经过)。
[0208]
点2101表示作为用于计算跟摄辅助校正量的起点的镜头角速度检测时的信息。“t”是镜头角速度检测时间,以及“ν”是基于在与镜头角速度检测时间段和镜头角速度检测时间段的相同定时所执行的照相机主体100的运动矢量信息所生成的被摄体角速度信息。镜头角速度检测时间t是图18a中的镜头角速度检测时间段1017的重心时间,并且是图18b和18c中的镜头角速度检测时间段2029的重心时间。被摄体角速度信息ν是在图18a的被摄体角速度通信2019中发送给可更换镜头200的信息、以及在图18b和18c的被摄体角速度通信2031中发送给可更换镜头200的信息。点2101的被摄体角速度信息包含被摄体角加速度信息“a”,并且使得能够利用预测表达式(表达式(1))来线性预测点2102的在实时取景释放曝光处理中的被摄体角速度v。
[0209]
在本实施例中,可更换镜头向照相机主体发送镜头角速度检测时间和镜头角速度检测信息。照相机主体基于从可更换镜头所接收到的镜头角速度信息和运动矢量信息来生成被摄体角速度信息,并且将被摄体角速度信息和镜头角速度检测时间发送给可更换镜头。该结构可以提供具有跟摄辅助功能的镜头可更换照相机系统,其中,该功能可以在通过拍摄者在任意定时所操作的实时取景曝光处理中,适当预测被摄体的移动量,并且利用图像稳定控制器来对该移动量进行校正。
[0210]
第四实施例
[0211]
接着,将说明根据本发明的第四实施例。本实施例更精确地校正实时取景释放曝光处理中的被摄体移动量。本实施例的基本结构与第三实施例的基本结构相同。
[0212]
如图19所示,第三实施例通过使用紧挨在实时取景释放曝光处理之前发送给可更换镜头200的一个被摄体角速度信息来线性预测曝光时的被摄体移动量。通常,在需要跟摄的摄像场景中,照相机主体100和被摄体相互逐渐接近,因此在曝光时所要校正的被摄体移动量加速增大。因此,第三实施例中的线性插值可能增大插值量的误差。因此,本实施例存储要从照相机主体100发送给可更换镜头200的多个被摄体角速度信息,并且利用多项式来预测实时取景释放曝光处理中的被摄体的移动量。
[0213]
将参考图20来说明照相机系统10(包括照相机主体100和可更换镜头200)的跟摄辅助处理。图20是照相机系统10的跟摄辅助处理的时序图。图20示出在所安装的可更换镜头200兼容跟摄辅助的情况下、在跟摄辅助模式和实时取景摄像模式下的照相机系统10的处理时序。在图20中,附图标记2001~2027与第三实施例所述的图18a中的附图标记2001~2027相同。
[0214]
不同于第三实施例,本实施例使用两个时间段、即运动矢量检测时间段2028(具有与镜头角速度检测时间段2029的定时相同的定时)和运动矢量检测时间段2016(具有与镜头角速度检测时间段2017的定时相同的定时)的被摄体角速度信息。通过被摄体角速度通信2031,来将运动矢量检测时间段2028的被摄体角速度信息发送给可更换镜头200。通过被
摄体角速度通信2019,来将运动矢量检测时间段2016的被摄体角速度信息发送给可更换镜头200。
[0215]
现在,将参考图21来说明曝光时的图像稳定控制器209的驱动量的计算方法。图21是曝光时的图像稳定控制器209的驱动量的计算方法的说明图。在图21中,纵轴表示被摄体角速度,以及横轴表示时间(时间经过)。
[0216]
在图21中,点2201表示通过被摄体角速度通信2031发送给可更换镜头200的信息,并且包含时间t1的被摄体角速度ν1和被摄体角加速度a1的信息。点2202表示通过被摄体角速度通信1019发送给可更换镜头200的信息,并且包含时间t2的被摄体角速度ν2和被摄体角加速度a2的信息。
[0217]
可以基于这两个点(点2201和2202)处的信息来计算第二预测表达式,并且本实施例利用下面的表达式(3)来进行计算。
[0218][0219]
利用表达式(3)计算曝光时的或者点2203处的被摄体角速度信息v。本实施例基于实时取景释放曝光处理之前的两个点处的被摄体角速度信息来计算实时取景释放曝光处理中的被摄体移动量,但是可以使用用于利用三个以上的点的预测的多项式。
[0220]
在本实施例中,可更换镜头将镜头角速度检测信息和镜头角速度检测时间发送给照相机主体。照相机主体基于从可更换镜头所接收到的镜头角速度信息和运动矢量信息,来生成被摄体角速度信息,并且将所生成的被摄体角速度信息和镜头角速度检测时间发送给可更换镜头。通过该结构,可更换镜头可以使用多个被摄体角速度信息和角速度检测时间来精确预测曝光时的被摄体的移动量。因此,本实施例可以提供配备有跟摄辅助功能的镜头可更换照相机系统,其可以更精确地预测曝光时的被摄体的移动量,并且利用图像稳定控制器来校正该移动量。
[0221]
在各实施例中,照相机主体100中的控制设备包括计算器(跟摄辅助控制器134)和被配置成接收在角速度检测时间段中所检测到的角速度以及角速度检测时间信息的通信器(镜头通信控制器133)。计算器基于运动矢量和角速度来计算被摄体的角速度信息。通信器发送曝光开始定时以及相互关联的被摄体角速度信息和角速度检测时间信息。
[0222]
在各实施例中,可更换镜头200中的控制设备包括被配置成接收基于运动矢量检测时间段所设置的角速度检测时间段的通信器(i/f 220)、以及被配置成计算曝光时的被摄体角速度信息的计算器(镜头控制器210)。通信器(通信单元)发送在角速度检测时间段所检测到的角速度以及角速度检测时间信息,接收基于运动矢量和角速度所计算出的与角
速度检测时间信息相关联的被摄体角速度信息,并且接收曝光开始定时。计算器基于所接收到的被摄体角速度信息、角速度检测时间信息和曝光开始定时,来计算曝光时的被摄体角速度信息。计算器可以基于曝光时的被摄体角速度信息来控制图像稳定。计算器可以基于紧挨在曝光开始定时之前所接收到的被摄体角速度信息,来计算曝光时的被摄体角速度信息。通信器可以在接收到曝光开始定时之前,接收在不同定时所获得的多个被摄体角速度信息。通信器通过使用多个被摄体角速度信息,来计算曝光时的被摄体角速度信息。通信器可以通过全双工通信,来在同一通信处理中发送在角速度检测时间段所检测到的角速度和接收被摄体角速度信息。
[0223]
各实施例可以提供在跟摄校正量超出图像稳定控制透镜的可移动范围时能够将跟摄辅助结果反馈给拍摄者的、或者能够提高跟摄辅助性能的控制设备、摄像设备、镜头设备、控制方法和存储介质。
[0224]
其它实施例
[0225]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0226]
尽管已经参考典型实施例说明了本发明,但是应该理解,本发明不局限于所公开的典型实施例。所附权利要求书的范围符合最宽的解释,以包含所有这类修改、等同结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1