一种物联网通信资源管理方法
1.本发明属于物联网协作通信领域,涉及一种物联网通信资源管理方法,特别是一种基于智能反射面协作机制的物联网通信资源管理方法。
背景技术:
2.随着5g通信网络的推广与物联网信息传输技术的飞速发展,多元化、普适化、智能化的信息产业正以前所未有的方式推动产业变革。协作物联网通信技术作为通信网络的一个重要组成部分成为了研究人员重点关注的研究领域。作为一种协作通信手段,智能反射面(intelligent reflecting surface)技术能够有效提高协作通信物联网的系统容量,增加网络数据传输速度,对于提升物联网的能量效率及用户服务质量与服务体验有着重要的应用意义。
3.在实际应用过程中,智能反射面由多个被动反射元组成,这些反射元会通过特定的控制链路连接到一个中心控制器。中心控制器可以实时决策并调整智能反射面每个被动反射元的相移,这些相移决策结果组成了智能反射面的相移矩阵。通过智能反射面的辅助信息传输过程,物联网系统可以极大地提升信息传输速率并可实现远距离信息传输,进而改善网络边缘用户的信息传输质量及服务质量。针对现有的协作智能反射面通信系统,目前研究对智能反射面的协作通信的应用进行了一定的研究并提出不同通信场景的系统应用模型,例如qin tao等在《ieee communications letters》(2020,vol.24,no.11,pp.2464
‑
2468)上发表的“performance analysis of intelligent reflecting surface aided communication systems”提出了一种基于智能反射面协作机制的网络通信模型;shuowen zhang等在《ieee journal on selectedareas in communications》(2020,vol.38,no.8,pp.1823
‑
1838)上发表的“capacitycharacterization for intelligent reflecting surface aided mimo communication”针对智能反射面协作mimo系统进行了分析,并提出一种交替优化机制来调整智能反射元的增益以提升系统容量。然而,由于智能反射面由多个反射元组成且智能反射面的资源管理属于非凸优化问题,当其反射元数目急剧增大时,现有的资源管理办法很难找到最优的资源管理方法,适用性较差。此外,现有关于智能反射面协作通信技术的研究尚处于起步阶段,针对智能反射面协作机制物联网多资源能效管理的研究较少,相关的通信网络模型及资源管理方法仍有很多方面需要进一步的探索。
技术实现要素:
4.针对上述现有技术,本发明要解决的技术问题是提供一种基于智能反射面协作机制的物联网通信资源管理方法,改善现有协作物联网的通信质量并提升系统吞吐量。
5.为解决上述技术问题,本发明的一种物联网通信资源管理方法,包括以下步骤:
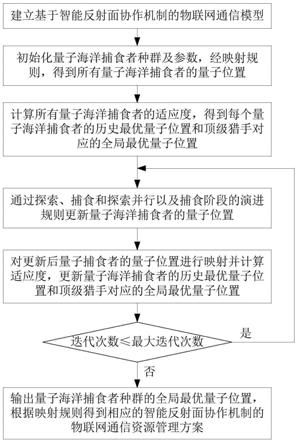
6.步骤一:建立基于智能反射面协作机制的物联网通信模型;
7.步骤二:初始化量子海洋捕食者种群及参数,经映射规则,得到所有量子海洋捕食
者的量子位置;
8.步骤三:计算所有量子海洋捕食者的适应度,得到每个量子海洋捕食者的历史最优量子位置和顶级猎手对应的全局最优量子位置;
9.步骤四:根据探索和捕食策略更新量子海洋捕食者的量子位置;
10.步骤五:对更新后的量子海洋捕食者的量子位置进行映射,得到所有量子海洋捕食者的位置并计算更新后的量子海洋捕食者的适应度,根据适应度大小更新每个量子海洋捕食者的历史最优量子位置和顶级猎手对应的全局最优量子位置;
11.步骤六:如果迭代次数小于预先设定的最大迭代次数,令t=t+1,返回步骤四;否则,终止迭代,输出量子海洋捕食者种群的全局最优量子位置,根据映射规则可得到协作智能反射面物联网通信资源管理方案。
12.步骤一中建立基于智能反射面协作机制的物联网通信模型具体为:
13.物联网通信结构由物联网设备发送端、物联网设备接收端、中心控制器及智能反射面组成,智能反射面由k个智能反射元组成,物联网设备发送端和物联网设备接收端均由一根单天线组成,定义从物联网设备发送端到智能反射面的信道状态信息为λ=[λ1,λ2,...,λ
k
]
t
,智能反射面到物联网设备接收端的信道状态信息为g=[g1,g2,...,g
k
],物联网设备发送端到物联网设备接收端的信道状态信息为
[0014]
采用k
×
k维矩阵表示智能反射面智能反射元的相移控制矩阵,相移控制矩阵为η为反射系数,矩阵内包含的元素α
k
为相移控制角,定义域为[0,2π),中心控制器对相移控制角进行调整,用x表示物联网设备发送端的归一化发射信号,经过智能反射面协作传输后,物联网设备接收端接收到的信号为式中n为复合高斯白噪声向量,w是功率为n0的高斯白噪声,在智能反射面协作通信的场景下,物联网设备接收端的信噪比噪声,在智能反射面协作通信的场景下,物联网设备接收端的信噪比为复合高斯白噪声功率,整个网络的吞吐量为r
s
=log2|1+γ|;
[0015]
以物联网最大网络效率为优化目标的智能反射面资源配置问题为以物联网最大网络效率为优化目标的智能反射面资源配置问题为
[0016]
是智能反射面工作时消耗的功率,约束条件为:δ
k
∈[e
j
·0,e
j
·
2π
),k=1,2,...,k,p∈(0,p
max
];p
max
是物联网设备发送端允许发射的最大功率。
[0017]
步骤二中初始化量子海洋捕食者种群及参数,经映射规则,得到所有量子海洋捕食者的量子位置具体为:
[0018]
设定第t代量子海洋捕食者种群u(t)包含m个量子海洋捕食者,每个量子海洋捕食者的维数为d,表示待优化问题的维数,设置量子海洋捕食者种群的最大迭代次数t
max
,固定比率τ1和τ2作为划分量子海洋捕食者种群不同演进阶段的门限阈值,第t代第i个量子海洋捕食者的量子位置可以表示为其中初始时,令t=0,此时第i个量子海洋捕食者的量子位置记为它的历史最优量子位置的初值通过对
量子位置进行映射可以得到第i个量子海洋捕食者的位置映射规则为:其中和分别表示待解决问题第d维搜索区间的上界和下界,每个量子海洋捕食者的位置对应一种协作智能反射面物联网通信资源管理方案。
[0019]
步骤三中计算所有量子海洋捕食者的适应度,得到每个量子海洋捕食者的历史最优量子位置和顶级猎手对应的全局最优量子位置具体为:
[0020]
将量子海洋捕食者的位置代入适应度函数计算所有量子海洋捕食者的适应度,适应度越大表示物联网的网络能量效率越大,将第i个量子海洋捕食者直到第t代为止搜索到的适应度最大的量子位置记为第i个量子海洋捕食者的历史最优量子位置将直到第t代为止适应度最大的量子海洋捕食者记为量子海洋捕食者种群u(t)的顶级猎手,它的量子位置记为全局最优量子位置
[0021]
步骤四中根据探索和捕食策略更新量子海洋捕食者的量子位置具体为:
[0022]
每一个量子海洋捕食者根据自身和种群顶级猎手的量子位置,通过探索、捕食和探索并行以及捕食等三个阶段对种群进行更新,对于第t代量子海洋捕食者种群,如果t≤τ1·
t
max
,所有量子海洋捕食者进行探索来搜寻猎物,在探索阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和其中表示更新后的第i个量子海洋捕食者的第d维量子旋转角,i=1,2,
…
,m,d=1,2,...,d,c1为影响因子,表示在探索阶段顶级猎手对量子旋转角的影响程度,为服从标准正态分布的随机数,abs(.)表示取绝对值;
[0023]
如果τ1·
t
max
<t≤τ2·
t
max
,量子海洋捕食者种群捕食和探索并行,在捕获猎物的同时搜寻猎物更加丰富的区域,在这一阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和其中c2、c3和c4为影响因子,c2表示在捕食和探索并行阶段顶级猎手与其他量子海洋捕食者对量子旋转角的联合影响程度,c3和c4分别表示在捕食和探索并行阶段顶级猎手和量子海洋捕食者的历史最优量子位置对量子旋转角的影响程度,r1和r2表示其他量子海洋捕食者的序号,r1∈{1,2,...,m}且r1≠i,r2∈{1,2,...,m}且r2≠i,r1≠r2;ε为控制因子,和为服从标准正态分布的随机数,为服从levy分布的随机数;
[0024]
如果τ2·
t
max
<t≤t
max
,量子海洋捕食者种群的所有量子海洋捕食者根据已获得的猎物信息进行捕食来捕获猎物,在捕食阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和
其中c5和c6为影响因子,分别表示在捕食阶段顶级猎手和量子海洋捕食者的历史最优量子位置对量子旋转角的影响程度,为服从levy分布的随机数,为服从标准正态分布的随机数。
[0025]
本发明改善了现有协作物联网的通信质量并提升系统吞吐量,该方法通过利用所设计的量子海洋捕食者(quantum marine predators,qmp)这一资源管理机制,对物联网通信系统中的多种资源进行管理,可以极大地提升物联网系统的网络能量效率,进而提升物联网通信性能与服务质量。与现有技术相比,本发明的有益效果是:
[0026]
(1)解决了现有智能反射面物联网协作通信的多资源配置问题,设计了基于量子海洋捕食者机制的网络资源管理方法,能够有效求得物联网设备发送端的最优发射功率及智能反射面的最优相移控制矩阵,极大地提升物联网通信系统的网络能量效率,所设计的方法收敛速度快、精度高、稳定性强,可以短时间内实现物联网资源管理。
[0027]
(2)对于现有的协作智能反射面物联网在超远距离信息传输情形下网络能量效率不高的问题,本发明设计的基于量子海洋捕食者智能反射面协作机制的物联网通信资源管理方法可以有效解决远距离数据传输能量效率低的问题,节省了硬件资源,提升了物联网通信系统的服务质量。
[0028]
(3)本发明将量子演进理论与海洋捕食者智能搜寻机制进行有机地融合,设计了多重演进策略对实际智能反射面物联网多资源管理问题进行求解,突破了现有方法的应用局限,为其他工程问题的解决提供新思路,具有实际推广价值。
附图说明
[0029]
图1为基于量子海洋捕食者机制的协作智能反射面物联网通信资源管理方法示意图。
[0030]
图2为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随迭代次数变化的曲线。
[0031]
图3为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随智能反射元数目变化的曲线。
[0032]
图4为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随物联网设备发送端允许发射最大功率变化的曲线。
具体实施方式
[0033]
下面结合说明书附图和具体实施方式对本发明做进一步说明。
[0034]
如图1所示,本发明设计的基于量子海洋捕食者机制的协作智能反射面物联网通信资源管理方法包括以下步骤:
[0035]
步骤一,建立基于智能反射面协作机制的物联网通信模型
[0036]
考虑一个由物联网设备发送端、物联网设备接收端、中心控制器及智能反射面所组成的物联网通信结构。智能反射面由k个智能反射元组成。考虑实际通信场景大多数的情况,物联网设备发送端和物联网设备接收端均由一根单天线组成。定义从物联网设备发送
端到智能反射面的信道状态信息为λ=[λ1,λ2,...,λ
k
]
t
,智能反射面到物联网设备接收端的信道状态信息为g=[g1,g2,...,g
k
],物联网设备发送端到物联网设备接收端的信道状态信息为
[0037]
用一个具体的k
×
k维矩阵来表示智能反射面智能反射元的相移控制矩阵,相移控制矩阵具体可以表示为η为反射系数,矩阵内包含的元素k=1,2,...,k,α
k
为相移控制角,定义域为[0,2π),中心控制器可以对相移控制角进行调整。用x表示物联网设备发送端的归一化发射信号,经过智能反射面协作传输后,物联网设备接收端接收到的信号为式中n为复合高斯白噪声向量,w是功率为n0的高斯白噪声。在智能反射面协作通信的场景下,物联网设备接收端的信噪比端的信噪比为复合高斯白噪声功率。整个网络的吞吐量为r
s
=log2|1+γ|。
[0038]
针对基于智能反射面协作机制的物联网通信网络,提出以物联网最大网络效率为优化目标的智能反射面资源配置问题为优化目标的智能反射面资源配置问题为是智能反射面工作时消耗的功率,约束条件为:δ
k
∈[e
j
·0,e
j
·
2π
),k=1,2,...,k,p∈(0,p
max
]。p
max
是物联网设备发送端允许发射的最大功率。
[0039]
步骤二,初始化量子海洋捕食者种群及参数
[0040]
设定第t代量子海洋捕食者种群u(t)包含m个量子海洋捕食者,每个量子海洋捕食者的维数为d,表示待优化问题的维数。设置量子海洋捕食者种群的最大迭代次数t
max
,固定比率τ1和τ2作为划分量子海洋捕食者种群不同演进阶段的门限阈值。第t代第i个量子海洋捕食者的量子位置可以表示为其中初始时,令t=0,此时第i个量子海洋捕食者的量子位置记为它的历史最优量子位置的初值通过对量子位置进行映射可以得到第i个量子海洋捕食者的位置映射规则为:其中和分别表示待解决问题第d维搜索区间的上界和下界,每个量子海洋捕食者的位置对应一种协作智能反射面物联网通信资源管理方案。
[0041]
步骤三,计算所有量子海洋捕食者的适应度
[0042]
将量子海洋捕食者的位置代入适应度函数计算所有量子海洋捕食者的适应度,适应度越大表示物联网的网络能量效率越大。将第i个量子海洋捕食者直到第t代为止搜索到的适应度最大的量子位置记为第i个量子海洋捕食者的历史最优量子位置将直到第t代为止适应度最大的量子海洋捕食者记为量子海洋捕食者种群u(t)的顶级猎手,它的量子位置记为全局最优量子位置
[0043]
步骤四,根据探索和捕食策略更新量子海洋捕食者
[0044]
量子海洋捕食者种群中的每一个量子海洋捕食者根据自身和种群顶级猎手的量子位置,通过探索、捕食和探索并行以及捕食等三个阶段对种群进行更新。对于第t代量子海洋捕食者种群,如果t≤τ1·
t
max
,所有量子海洋捕食者进行探索来搜寻猎物,在探索阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和其中表示更新后的第i个量子海洋捕食者的第d维量子旋转角,i=1,2,...,m,d=1,2,...,d,c1为影响因子,表示在探索阶段顶级猎手对量子旋转角的影响程度,为服从标准正态分布的随机数,abs(.)表示取绝对值。
[0045]
如果τ1·
t
max
<t≤τ2·
t
max
,量子海洋捕食者种群捕食和探索并行,在捕获猎物的同时搜寻猎物更加丰富的区域,在这一阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和其中c2、c3和c4为影响因子,c2表示在捕食和探索并行阶段顶级猎手与其他量子海洋捕食者对量子旋转角的联合影响程度,c3和c4分别表示在捕食和探索并行阶段顶级猎手和量子海洋捕食者的历史最优量子位置对量子旋转角的影响程度,r1和r2表示其他量子海洋捕食者的序号,r1∈{1,2,...,m}且r1≠i,r2∈{1,2,...,m}且r2≠i,r1≠r2;ε为控制因子,和为服从标准正态分布的随机数,为服从levy分布的随机数。
[0046]
如果τ2·
t
max
<t≤t
max
,量子海洋捕食者种群的所有量子海洋捕食者根据已获得的猎物信息进行捕食来捕获猎物,在捕食阶段,量子海洋捕食者的量子旋转角和量子位置的更新方程为:和其中c5和c6为影响因子,分别表示在捕食阶段顶级猎手和量子海洋捕食者的历史最优量子位置对量子旋转角的影响程度,为服从levy分布的随机数,为服从标准正态分布的随机数。
[0047]
步骤五,对更新后的量子海洋捕食者的量子位置进行映射,得到所有量子海洋捕食者的位置并计算更新后的量子海洋捕食者的适应度,根据适应度大小更新每个量子海洋捕食者的历史最优量子位置和顶级猎手对应的全局最优量子位置。
[0048]
步骤六,如果迭代次数小于预先设定的最大迭代次数,令t=t+1,返回步骤四;否则,终止迭代,输出量子海洋捕食者种群的全局最优量子位置,根据映射规则可得到协作智能反射面物联网通信资源管理方案。
[0049]
通过仿真实验进一步说明本发明的效果:
[0050]
针对基于智能反射面协作机制的物联网系统,k=50,物联网设备发送端到物联网设备接收端的距离为240m,非视距传输信道衰落系数为3.7,物联网设备发送端到智能反射
面的距离为150m,信道衰落系数为2.5,智能反射面到物联网设备接收端的距离为160m,信道衰落系数为2.5,所有信道均为瑞利衰落信道。莱斯因子均等于1,p
max
=35dbm,η=1,高斯噪声功率为
‑
60dbm。对于量子海洋捕食者机制的通信资源管理方法,设置量子海洋捕食者种群规模m=10,最大迭代次数t
max
=500,影响因子c1=0.3,c2=0.25,c3=0.3,c4=0.1,c5=0.3,c6=0.1,控制因子ε=0.5。为了获得物联网设备发送端的最优发射功率及每个智能反射元的最优相移,量子海洋捕食者的维数d=k+1,反射元的最优相移,量子海洋捕食者的维数d=k+1,为了便于比较所提出的量子海洋捕食者机制的性能,将海洋捕食者机制应用到协作智能反射面物联网通信资源管理中,并将二者的种群规模和最大迭代次数均设为相同值,所有实验结果均为200次仿真实验的均值。海洋捕食者机制的其他参数设置参考afshinfaramarzi等在《expert systems with applications》(2020,vol.152,art no.113377)上发表的文献“marinepredators algorithm:a nature
‑
inspired metaheuristic”。
[0051]
图2~图4给出了采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随迭代次数、智能反射元数目和物联网设备发送端允许发射的最大功率变化的结果。
[0052]
图2为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随迭代次数变化的曲线。从仿真结果可以明显看出量子海洋捕食者机制的收敛性能和寻优能力均优于海洋捕食者机制,采用量子海洋捕食者机制得到的智能反射面协作的物联网通信资源管理方法可以获得更大的能量效率,提升物联网通信网络的整体性能。
[0053]
图3为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随智能反射元数目变化的曲线。仿真中智能反射元数目从10增加到200,从仿真结果可以看出,针对不同的智能反射元数目,相比于海洋捕食者机制,采用量子海洋捕食者机制的协作智能反射面物联网通信资源管理方法能获得最大的能量效率。
[0054]
图4为采用量子海洋捕食者机制和海洋捕食者机制的协作智能反射面物联网通信资源管理方法的能量效率随物联网设备发送端允许发射最大功率变化的曲线。仿真中发送端允许发射的最大功率从10dbm增加到35dbm,从仿真结果可以看出物联网通信网络的能量效率随着发送端允许发射的最大功率增加而增加,随着发送端允许发射的最大功率增加到30dbm,能量效率趋于平稳。此外,图4还可以看出对于采用量子海洋捕食者机制的协作智能反射面物联网通信资源管理方法,其能量效率始终优于采用海洋捕食者机制的协作智能反射面物联网通信资源管理方法,证明了所设计方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1