DLP微型投影方法、系统、设备、存储介质及程序产品与流程
dlp微型投影方法、系统、设备、存储介质及程序产品
技术领域
1.本技术涉及dlp投影技术,尤其涉及一种dlp微型投影方法、系统、设备、存储介质及程序产品。
背景技术:
2.微型投影仪广泛应用于工作及生活中,其中dlp投影仪在对比度和均匀性都非常出色。dlp投影仪应用了数字光处理(digital light processing,dlp)技术。该技术的关键处理元件是数字微镜器件(digital micromirror device,dmd)。dmd是一种光开关,利用旋转反射镜实现光开关的开合。dmd是在半导体芯片上布置一个由微镜片(精密、微型的反射镜)所组成的矩阵,每一个微镜片控制投影画面中的一个像素。
3.目前,ti公司生产的dmd尺寸小于0.47英寸的dlp系统,适配的是三色led光源架构。考虑到这种架构dmd尺寸较小,支持的光通量较低,超过dmd的光通量限额则会损坏dmd。因此,led光源的光功率相对较低,故dmd小于0.47英寸的dlp系统目前都是适配led光源,采用此架构的整机产品目前也都是led微投产品。
4.然而,上述的dmd尺寸小于0.47英寸的dlp投影方案中,由于led光源的亮度较低,导致产生dlp投影系统亮度不够。
技术实现要素:
5.本技术提供一种dlp微型投影方法、系统、设备、存储介质及程序产品,用以进一步提高dlp微型投影系统的亮度。
6.第一方面,本技术提供一种dlp微型投影方法,应用于dlp微型投影系统,系统包括前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;方法包括:前端处理模块对视频图像进行解析,输出解析信号;dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号;光源驱动单元根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。
7.一些实施例中,解析信号包括视频场同步信号;方法还包括:同步控制单元控制荧光轮和滤色轮按照目标转速转动;其中,荧光轮和滤色轮在目标转速下的光色切换频率为视频场同步信号的频率的整数倍。
8.一些实施例中,同步控制单元控制荧光轮和滤色轮转动至目标转速,包括:同步控制单元向荧光轮和滤色轮输出具有初始占空比的pwm信号,pwm信号用于控制荧光轮和滤色轮的转速;同步控制单元检测荧光轮和滤色轮的当前转速是否满足目标转速;若不满足目标转速,则调整当前输出的pwm信号的占空比,直至荧光轮和滤色轮的当前转速满足目标转速。
9.一些实施例中,对应荧光轮和滤色轮分别设置有第一传感器和第二传感器;荧光轮对应设置有第一标志;滤色轮对应设置有第二标志;同步控制单元控制荧光轮和滤色轮
转动,包括:同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置,以及控制滤色轮转动至第二位置;其中,第一位置为自第一传感器检测到第一标志经过第一相对参数后到达的位置,第二位置为自第二传感器检测到第二标志经过第二相对参数到达的位置;其中,第一位置和第二位置对应颜色指示信号指示的颜色。
10.一些实施例中,方法还包括:前端处理模块对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;同步控制单元根据调整指令,以荧光轮的第一标识参数为基准,调整滤色轮的第二标识参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相对关系,第二标识参数表征滤色轮在预定光色下的起始位置与第二标志所在位置之间的相对关系;获取当前第一标识参数和第二标识参数的第一参数差。
11.进一步地,同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置,以及控制滤色轮转动至第二位置,包括:同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置;同步控制单元根据颜色指示信号指示的颜色,控制滤色轮转动至第二修正位置;第二修正位置基于第二位置经过第一参数差的补偿获得。
12.一些实施例中,方法还包括:前端处理模块对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;同步控制单元根据调整指令,以荧光轮的第一标识参数为基准,调整dlp显示控制单元输出的颜色指示信号的信号参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相位,信号参数表征颜色指示信号的频率;获取当前第一标识参数和颜色指示信号的信号参数之间的第二参数差。
13.进一步地,dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号,包括:dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出经过第二参数差补偿的颜色指示信号。
14.第二方面,本技术提供一种dlp微型投影系统,包括:包括前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;前端处理模块,用于对视频图像进行解析,输出解析信号;dlp显示控制单元,用于根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号;光源驱动单元,用于根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元,用于控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。
15.第三方面,本技术提供一种电子设备,包括:处理器,以及与处理器通信连接的存储器;存储器存储计算机执行指令;处理器执行存储器存储的计算机执行指令,以实现如第一方面的方法。
16.第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如第一方面的方法。
17.第五方面,本技术提供一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现如第一方面的方法。
18.本技术提供的dlp微型投影方法、系统、设备、存储介质及程序产品,系统包括:前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;方法包括:前端处理模块对视频图像进行解析,输出解析信号;dlp显示控制单元根据解析
信号,向同步控制单元和光源驱动单元输出颜色指示信号;光源驱动单元根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。本技术采用单色激光、荧光轮和滤色轮相互配合发出基础色光,取代了三色led光源,进一步提高了dlp微型投影系统的亮度。
附图说明
19.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
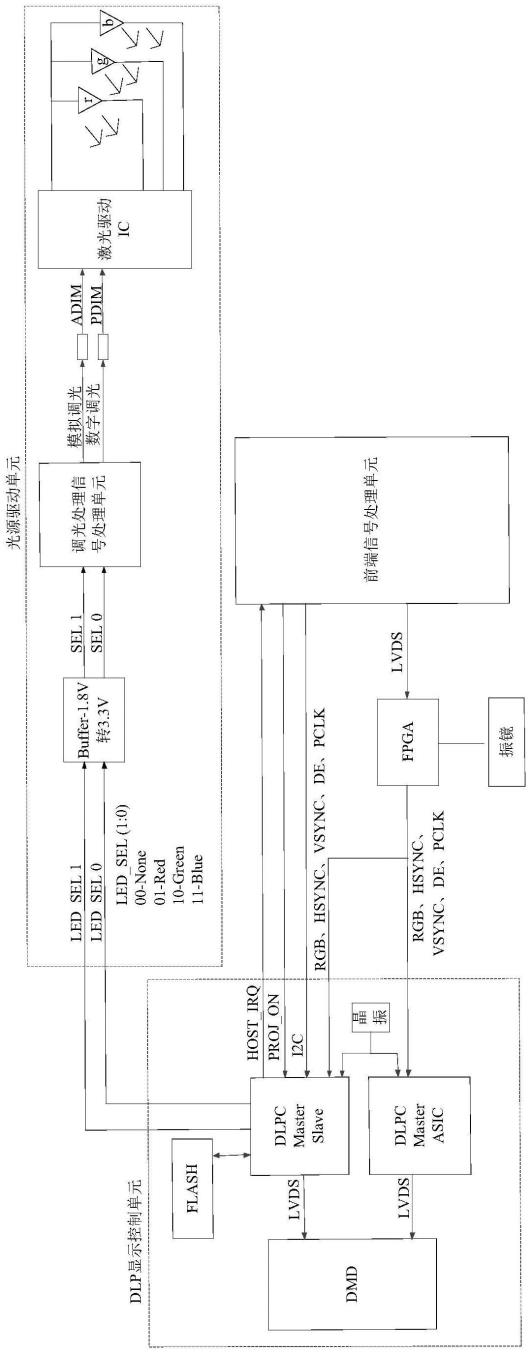
20.图1为传统的三色led光源的dlp微型投影系统结构图;
21.图2为本技术提供的一种dlp微型投影方法的应用场景;
22.图3为本技术提供的一种dlp微型投影系统的结构示意图;
23.图4为本技术提供的一种dlp微型投影方法的流程图;
24.图5为本技术提供的一种激光光源与荧光轮和滤色轮配合发光的原理图;
25.图6为本技术提供的又一种dlp微型投影系统的结构示意图;
26.图7为本技术提供的一种dlp微型投影方法的调试过程的流程图;
27.图8为本技术提供的一种电子设备的结构示意图。
28.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
29.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与本技术的一些方面相一致的装置和方法的例子。
30.对本技术所涉及的名词进行解释:dlp是“digital light processing”的缩写,即为数字光处理,也就是说这种技术要先把影像信号经过数字处理,然后再把光投影出来。它是基于数字微镜元件——dmd(digital micromirror device)来完成可视数字信息显示的技术。说得具体点,就是dlp投影技术应用了数字微镜晶片(dmd)来作为主要关键处理元件以实现数字光学处理过程。
31.投影技术自出现至今,已经经历了三代,分别是阴极射线管(crystal ray tube,crt)技术、液晶显示器(liquid crystal display,lcd)技术、硅基液晶(liquid crystal on silicon,lcos)技术、数码光路处理器(digital light processor,dlp)技术。其中,最新一代的投影技术中的dlp技术,采用微镜反射投影技术,在投影效果上,亮度和对比度明显提高,体积和重量明显减小,市场前景看好。
32.在dlp投影仪中,图像是由dmd(digital micromirror device,数字微镜器件)产生的。dmd是在半导体芯片上布置一个由微镜片(精密、微型的反射镜)所组成的矩阵,每一个微镜片控制投影画面中的一个像素。目前,dmd尺寸小于0.47英寸的dlp系统,适配的是三
色led光源架构。因为这种架构dmd尺寸较小,支持的光通量较低,超过dmd的光通量限额则会损坏dmd,因此,led光源的光功率相对较低,故dmd小于0.47英寸的dlp系统目前都是适配led光源,采用此架构的整机产品目前也都是led微投产品。
33.然而,尽管保证了光通量不超过dmd的光通量,但由于led光源的亮度较低,导致产生上述的dmd尺寸小于0.47英寸的dlp系统亮度不够的问题。
34.本技术提供的dlp微型投影方法、系统、设备、存储介质及程序产品,旨在解决现有技术的如上技术问题。
35.简单地说,该亮度为光源经过dmd和镜头的反射后呈现出来的图像的亮度,经过此传播过程,光源的能量乘上dmd转换效率和镜头转换效率得到投影出来的图像的亮度。因此,想要提高亮度可以从两方面考虑,第一方面是提高光源的能量,第二方面是提高转换效率。
36.本技术考虑到第二方面可能涉及到dmd器件本身技术的改进或者控制程序上的改进,比较依赖ti公司的技术方案,技术要求和成本都较高,相较之下,第一方面更易操作和实现。又考虑到dmd器件具有光通量限额(dmd器件能承受到最大光通量),超过最大光通量会损坏dmd器件,而三色led光源还没有达到该最大光通量,尚有提高亮度的余地。因此,从第一方面着手,从源头上提高光的功率密度,提高投影亮度。
37.led光源技术中,光源功率密度按照功率从高到低依次分为三色激光、单色激光+色轮、三色led。本技术的技术方案示例在dmd小于0.47英寸的dlp系统架构上进行改进,使该系统支持单色激光器加荧光粉轮、滤色轮光源技术,在不超过dmd能够承受的最大光通量的情况下提升光源输入的光通量,最终提高整机亮度。
38.图1为传统的三色led光源的dlp微型投影系统结构图。包括前端信号处理单元、dlp显示控制单元、光源驱动单元及三色led光源。其中,前端信号处理单元及fpga芯片解析待投影视频,并输出视频解析信号,包括rgb数据信号、行同步信号(hsync)、视频场同步信号(vsync)、像素时钟信号(pclk)、使能信号(de)。其中,lvds低压差分信号是一种常用的高速视频信号传输标准。
39.dlpc master slave ic芯片和dlpc master asic芯片将视频解析信号转换成dmd面板能接收的特定的数据序列,将图像信息转换为dmd微镜的偏转状态;dlpc master slave ic芯片还输出颜色指示信号led_sel(1:0),用于协同控制三色激光,使每个像素显示不同的色彩,组成一帧画面。
40.其中,dlpc初始化流程为:前端信号处理单元输入proj_on(即低电平到高电平)给dlpc;dlpc从flash加载编码;软件运行;准备完成,输出host_irq通知前端信号处理单元;前端信号处理单元通过i2c初始化dlpc。
41.以下,对本技术示例性的应用场景进行介绍。
42.图2为本技术提供的一种dlp微型投影方法的应用场景。如图2所示,在一个会议场景中,通过投影仪,可将待投影的视频投影到投影区域,在投影区域内呈现视频画面(图2所示的画布中未显示视频画面)。将待投影视频转换成投影画面的过程由配置在投影仪内的dlp投影系统完成。其中,dlp微型投影仪可用于投放视频、文档、ppt等电子文件。由于其体积小巧,便于携带,广泛应用于移动商务。
43.下面以具体地实施例对本技术的技术方案以及本技术的技术方案如何解决上述
技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本技术的实施例进行描述。
44.本技术提供一种dlp微型投影方法,应用于dlp微型投影系统,系统包括前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮。图3为本技术提供的一种dlp微型投影系统的结构示意图,如图3所示,以待投影视频为例,将其导入dlp微型投影系统,经过系统解析和系统控制,各功能单元配合,输出投影画面。
45.图4为本技术提供的一种dlp微型投影方法的流程图,具体包括以下步骤:
46.s100、前端处理模块对视频图像进行解析,输出解析信号。具体的,解析信号包括rgb数据信号、行同步信号(hsync)、视频场同步信号(vsync)、像素时钟信号(pclk)、使能信号(de)。
47.s200、dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号。具体的,本技术中颜色指示信号用于指示三种颜色,分别是红色、绿色和蓝色。一种可选的指示颜色的方式为利用两位比特数编码来进行脉冲宽度调节,在特定工作周期内输出不同的脉冲信号以表征颜色,比如01表示红色、10表示绿色、11表示蓝色。
48.s300、光源驱动单元根据颜色指示信号,驱动激光光源发光。具体的,根据颜色指示信号确定使能信号,以控制激光光源的开启。
49.s400、同步控制单元控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。
50.本技术采用激光光源单色激光作为光源、与荧光轮和滤色轮配合发出对应的颜色。由于单色激光+色轮的光源功率密度高于三色led,因此可以通过提高光源功率来进一步提高dlp微型投影系统的亮度。
51.示例性的,图5为本技术提供的一种激光光源与荧光轮和滤色轮配合发光的原理图,为单色激光八色段色轮四基色光路图。结合图5,下面对激光光源与荧光轮、滤色轮相互配合输出基色光的原理进行介绍。
52.参照图5,包括激光光源601、第一聚焦透镜602、二向色镜603、荧光轮604、反射镜605、第二聚焦透镜606、滤色轮607、光导管608、全反射棱镜609、成像器件dmd610、投射镜头611。
53.发出蓝色光的光路流程(图5以短横线虚线“——”的箭头表示):以蓝色激光光源作为单色激光光源,经过二向色镜603的一面反射,穿过荧光轮604上的透明区,经过三个反射镜605的反射,再经过二向色镜603的另一面反射,到达第二聚焦透镜606;透过聚焦透镜606后,经过滤色轮607的透明区依然是蓝色光。
54.发出绿色光的光路流程(图5以点短横线虚线“—
·
—”的箭头表示):以蓝色激光光源作为单色激光光源,经过二向色镜603的一面反射,照射在荧光轮604上的绿色荧光区上,产生绿色荧光;该绿色荧光直接透过二向色镜603,到达第二聚焦透镜606;透过聚焦透镜606后,经过滤色轮607的绿色透过区进行绿色提纯,输出绿色光。
55.发出黄色光的光路流程(图5以双点短横线虚线“—
··
—”的箭头表示):以蓝色激光光源作为单色激光光源,经过二向色镜603的一面反射,射在荧光轮604上的黄色荧光区上,产生黄色荧光;该黄色荧光直接透过二向色镜603,到达第二聚焦透镜606;黄色荧光透过聚焦透镜606后,一部分经过滤色轮607的红色透过区输出红色光;一部分经过滤色轮
607的黄色透过区输出黄色光。
56.以图5所示的荧光轮604上的色区划分为例,当荧光轮604逆时针旋转时,可依次产生黄色荧光、绿色荧光、蓝色激光。以图5所示的滤色轮607上的色区划分为例,当滤色轮607逆时针旋转,并且配合前述的荧光轮604逆时针旋转时,最终输出光色的时序可以为红色、绿色、蓝色、黄色。其中,红色、绿色、蓝色用于呈现投影图像,黄色用来提高图像的明亮程度。进一步地,输出光色的时序与两个色轮上的色区分布有关,最开始输出的光色与两个色轮的转动起点有关。本技术对输出光色的时序不作限定,在实际应用过程中,要配合前端解析的视频信号的颜色需求的时序。之后,上述输出的光色经过光导管608进行匀光处理;匀光处理后的光在全反射棱镜609上发生全反射,并照射到成像器件dmd610上,由dmd反射到投影镜头中,投出画面。
57.图6为本技术提供的又一种dlp微型投影系统的结构图,为在图4基础上,使用单色激光八色段色轮四基色光源代替三色led光源。该系统包括前端处理模块(由前端信号处理单元和fpga芯片组成)、dlp显示控制单元(由dlpc芯片和dmd组成)、同步控制单元、光源驱动单元(由缓冲器、调光处理信号处理单元、激光驱动ic和转速控制单元组成)、激光光源、荧光轮和滤色轮。相较于传统的三色led光源的dlp微型投影系统,本技术的dlp微型投影系统,增加了同步控制单元、荧光轮、滤色轮、两个色轮对应的驱动ic和传感器、以及转速控制单元。
58.由于采用的单色激光+色轮作为光源,系统内涉及到荧光轮、滤色轮和激光三者的相互配合。下面结合图6所示的系统,对三者的配合工作过程进行介绍。
59.为了展示正确的颜色,系统中荧光轮和滤色轮需要完全同步,即具有相对应的颜色分区,并且同速转动。参照图6,同步控制单元接收前端处理模块输出的视频场同步信号,以此为基准,设定荧光轮与滤色轮的目标转速。方法包括:同步控制单元控制荧光轮和滤色轮按照目标转速转动;其中,荧光轮和滤色轮在目标转速下的光色切换频率为视频场同步信号的频率的整数倍。
60.具体的,一帧图像由红色、绿色、蓝色、黄色组成。色轮旋转一周,按照一定时序出射红光、绿光、蓝光、黄光,即对应形成一帧图像。视频场同步信号代表了显示每帧图像的时间间隔,在此间隔内,荧光轮和滤色轮在目标转速下每秒要至少旋转一圈,也就是说,保证在形成一阵图像时,四个基色均被出射一次。并且,为了保证下一帧图像的正确显示,每帧图像对应整数倍的旋转圈数,以避免串色。上述设定保证了正确的显示每帧图像。
61.在实际应用过程中,dlp投影设备会存在“彩虹现象”,因为单片dlp投影设备使用一个色轮来控制颜色,那么在任一特定时刻,屏幕上出现的其实只有一种颜色。如果人的目光在投影屏幕前快速晃动,那么合成画面的组合颜色将会是对肉眼可见的。可通过选择如图6所示的8色段的滤色轮,消除彩虹现象。另外,较高倍数的旋转频率也有利于避免看到彩虹现象。
62.一些实施例中,同步控制单元控制荧光轮和滤色轮转动至目标转速的方法包括:同步控制单元向荧光轮和滤色轮输出具有初始占空比的pwm信号,pwm信号用于控制荧光轮和滤色轮的转速;同步控制单元检测荧光轮和滤色轮的当前转速是否满足目标转速;若不满足目标转速,则调整当前输出的pwm信号的占空比,直至荧光轮和滤色轮的当前转速满足目标转速。
63.具体的,参照图6,同步控制单元向荧光轮所对应的驱动ic输出cw1_pwm信号,用于驱动荧光轮旋转;同步控制单元向滤色轮所对应的驱动ic输出cw2_pwm信号,用于驱动滤色轮旋转。当同步控制单元检测到当前转速不满足目标转速时,则通过调整输出的cw1_pwm信号和cw2_pwm信号分别调整荧光轮和滤色轮的转速,直到两个色轮的转速等于目标转速。上述由同步控制单元同时控制荧光轮和滤色轮的旋转,可保证荧光轮与滤色轮的转速一致,进而稳定地输出对应的色彩。当转速不一致时,两个色轮的色区不能稳定的对应,会输出不稳定的光色。
64.一些实施例中,如图6所示,使用的电机为bldc(brushless dc)电机,即无感三项直流无刷电机。bldc驱动主要信号功能:pwm为输入信号,控制消散斑轮子的转速,占空比越大,转速越快;fg为输出信号;bldc三相电机公共端centertap分别和motor_u、motor_v、motor_w相电压接比较器的正输入端,公共端centertap接比较器的负输入端,相电压和相电流每隔60度进行切换,需要6步完成一个360度周期。最终比较器输出的结果经过或门产生一个频率信号,此频率信号和三相电机转速形成一定的比例关系,即可通过motor driver fg信号计算计算轮子的转速。motor driver rd指示电机运转状态,如输出高电平表示电机预转正常,输出低电平表示电机预转异常。vm是电机驱动模块的供电。
65.为了实现同步控制单元对荧光轮和滤色轮的转速的检测,一般荧光轮和滤色轮的马达上均设置有标志mark作为检测参考点。具体的,该标志可以是设置在荧光轮和滤色轮上,也可以设置在其对应的转动电机上,只要能对应色轮的固定位置,可以起到检测色轮旋转状态即可。
66.参照图6,对应荧光轮和滤色轮分别设置有第一传感器和第二传感器;荧光轮对应设置有第一标志;滤色轮对应设置有第二标志。这个标志通常具有两个作用,一是用于探测色轮的转速,二是标志设置的位置通常与色轮颜色分区对齐,系统通过标志信号脉冲时刻的到来可以判断某种颜色的初始时刻。
67.在投影系统中标记的mark点,可被红外传感器感知到。以黑色标签作为标志,黑色标签据有低反射率,能够吸收红外探测光,黑色标签粘贴以外的其他表面为高反射率金属反射面或透过区域,红外传感器根据有无反射光产生脉冲信号。该脉冲信号是周期性的,因此,根据检测脉冲的频率,就可以实现监测马达转速和色轮颜色分区位置。
68.一些实施例中,本技术提供的dlp微型投影方法还包括:同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置,以及控制滤色轮转动至第二位置;其中,第一位置为自第一传感器检测到第一标志经过第一相对参数后到达的位置,第二位置为自第二传感器检测到第二标志经过第二相对参数到达的位置;其中,第一位置和第二位置对应颜色指示信号指示的颜色。
69.具体的,颜色指示信号为如图6所示的,dlp显示控制单元输出的led_sel(1:0)信号,并经过buffer缓冲器进行电压调整后,输送至同步控制单元。第一相对参数代表了某种颜色的起始时刻或者旋转角度与黑色标签形成的脉冲信号到来时刻的关系。举例说明,假设黑色标签粘贴在蓝色和绿色的颜色边界处,颜色顺序为红色、绿色、蓝色,那么红色颜色到来的时刻可以是黑色标签脉冲到来时刻对应的参数ref加上或减去一个数值d1。d1即为第一相对参数,该数值可以是一段时间或者一定圆心角度。第一位置为以第一标志为基准经过一段时间或旋转过一定圆心角度后对应的位置,该位置对应颜色指示信号对应的颜
色。
70.上述方法进一步阐述了dlp微型投影过程中,同步控制单元根据颜色指示信号来控制荧光轮和滤色轮旋转以投影对应的颜色的控制过程,其中两个色轮上的标志mark起到定位作用。dlp显示控制单元通过向同步控制单元输出颜色指示信号,同时也会向dmd芯片输出信号,使dmd芯片与出射的色光配合,以在正确的像素点显示正确的颜色,以保证最终合成正确的图像。
71.在实际应用过程中,标签会存在误差的问题,有误差就会导致两色轮并不一定在同一时刻到达预设的同一颜色边界处,也就是两色轮发生错位(错位是指即使初始标签都粘贴到同一颜色边界处,但是由于粘贴误差,导致两色轮的颜色边界在同一时刻并不完全对齐,也就是实际的颜色边界发生了错位,于是造成了混色现象。
72.因此,需要对dlp微型投影系统进行测试并调试。
73.一种可行的调试方法包括:前端处理模块对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;同步控制单元根据调整指令,以荧光轮的第一标识参数为基准,调整滤色轮的第二标识参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相对关系,第二标识参数表征滤色轮在预定光色下的起始位置与第二标志所在位置之间的相对关系;获取当前第一标识参数和第二标识参数的第一参数差。
74.其中,待测的多种色光包括红色、绿色、蓝色、白色。第一标识参数对应荧光轮上各色区块开始的位置与第一标志的位置的相对参数,该相对参数在同步控制单元内存储有预设的默认值。当出现测试图像结果明显串色等情况,则需要进行人工调整。以荧光轮的第一标识参数为基准,调整滤色轮的第二标识参数,目的是为了对粘贴偏差进行补偿,使得滤色轮与荧光轮上的色区块对应上,以显示正确的颜色。同时,获取调试后滤色轮和荧光轮之间的相位差,存储于同步控制单元中,在调试完成并使用该投影设备时直接进行调用,无需二次调整。
75.进一步地,同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置,以及控制滤色轮转动至第二位置,包括:同步控制单元根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置;同步控制单元根据颜色指示信号指示的颜色,控制滤色轮转动至第二修正位置;第二修正位置基于第二位置经过第一参数差的补偿获得。
76.具体的,第一参数差为滤色轮和荧光轮之间的相位差,通过调用该相位差,补偿第一标志和第二标志由于粘贴误差导致的颜色边界错位而带来的混色现象,使荧光轮与滤色轮上的色区对齐,输出准确的颜色。
77.一种可行的调试方法包括:前端处理模块对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;同步控制单元根据调整指令,以荧光轮的第一标识参数为基准,调整dlp显示控制单元输出的颜色指示信号的信号参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相对位置,信号参数表征颜色指示信号的频率;获取当前第一标识参数和颜色指示信号的信号参数之间的第二参数差。
78.上述设置中,以荧光轮的第一标识参数为基准,调整dlp显示控制单元输出的颜色指示信号的信号参数,目的是将激光开启的时刻与荧光轮上的颜色起始时刻对齐,以正常
显色。同时获取调试后颜色指示信号和荧光轮之间的相位差,存储于同步控制单元中,在调试完成并使用该投影设备时进行直接调用。
79.其中,参照图6,激光的开启受到转速控制单元的ld_en_out使能信号的控制。同步控制单元会根据两个色轮的转动状态和颜色指示信号,向前端信号处理单元输出mcu_ld_en使能信号;而转速控制单元会接收来自前端信号处理单元ext_ld_en使能信号、第一传感器输出的脉冲信号和第二传感器输出的脉冲信号。转速控制单元可根据脉冲信号计算出荧光轮和滤色轮的转速。考虑到激光是一束具有强能量的光,当照射在荧光轮和绿色轮上时,会使色轮发热。当色轮转速在某一速度阈值以上,则会良好的散热,不会损坏色轮。当色轮转速低于某一速度阈值时,则热量积累,有可能损坏色轮。当速度不够时,则转速控制单元控制不打开激光。
80.进一步地,dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号,包括:dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出经过第二参数差补偿的颜色指示信号。
81.具体的,第二参数差为颜色指示信号和荧光轮之间的相位差,通过调用该相位差,使激光开启时刻与色轮颜色开始时刻对齐,输出准确的颜色。
82.下面以一个具体的实施例,介绍dlp微型投影系统的调试过程。
83.图7为本技术提供的一种dlp微型投影方法的调试过程的流程图。拿到一台装配好的dlp微型投影装置,首先开机,上电后,同步控制单元根据设置的pwm占空比默认值控制荧光轮和滤色轮转速;通过由标志mark、传感器组成的反馈电路,同步控制单元检测色轮的设定转速是否符合目标转速,当大于目标转速时,则通过调整cw1_pwm和cw2_pwm,降低转速;当小于目标转速,则提高转速;最终使得设定转速等于目标转速。
84.此台dlp微型投影装置内预设以荧光轮mark和圆心角度表示的色区位置参数ref+d1。使用专用图卡,图卡一般是由红绿蓝白四色组成的一张图像,通过人工判断图卡中红、绿、蓝色块是否颜色正常、白色图卡灰阶是否有串色。当显色正常时,则不需要调整。当显色不正常时,则以荧光轮index1为基准,调整滤色轮index2与荧光轮之间的相位差;同时,以荧光轮index1为基准,调整dlp显示控制单元输出的颜色指示信号的相位差;直至显色正常,最终确定两个相位差值。调整完成后将其存储在同步控制单元中,下次开机时直接调用此数据。
85.本技术提供的dlp微型投影方法,应用于dlp微型投影系统,系统包括:前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;方法包括:前端处理模块对视频图像进行解析,输出解析信号;dlp显示控制单元根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号;光源驱动单元根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。本技术采用单色激光、荧光轮和滤色轮相互配合发出基础色光,取代了三色led光源,进一步提高了dlp微型投影系统的亮度。
86.实施例二
87.本技术提供一种dlp微型投影系统,如图6所示,包括:前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;前端处理模块,用于对视频图像进行解析,输出解析信号;dlp显示控制单元,用于根据解析信号,向同步控制单元和
光源驱动单元输出颜色指示信号;光源驱动单元,用于根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元,用于控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。
88.本技术采用激光光源单色激光作为光源、与荧光轮和滤色轮配合发出对应的颜色。由于单色激光+色轮的光源功率密度高于三色led,因此可以通过提高光源功率来进一步提高dlp微型投影系统的亮度。
89.在一些实施例中,解析信号包括视频场同步信号;同步控制单元,用于控制荧光轮和滤色轮按照目标转速转动;其中,荧光轮和滤色轮在目标转速下的光色切换频率为视频场同步信号的频率的整数倍。
90.具体的,一帧图像由红色、绿色、蓝色、黄色组成。色轮旋转一周,按照一定时序出射红光、绿光、蓝光、黄光,即对应形成一帧图像。也就是说,以视频场同步信号的频率为60hz为例,荧光轮和滤色轮在目标转速下每秒需要旋转60圈、120圈等,保证在形成一阵图像时,四个基色均被显示一次。并且为了保证下一帧图像的正确显示,四个基色被显示的次数应该是一致的,以避免串色。另外,较高的旋转频率也有利于避免看到彩虹现象。
91.在一些实施例中,同步控制单元,包括转速调节单元、和转速检测单元;转速调节单元,用于向荧光轮和滤色轮输出具有初始占空比的pwm信号,pwm信号用于控制荧光轮和滤色轮的转速;转速检测单元,用于检测荧光轮和滤色轮的当前转速是否满足目标转速;若不满足目标转速,则转速调节单元调整当前输出的pwm信号的占空比,直至荧光轮和滤色轮的当前转速满足目标转速。
92.为了实现同步控制单元对荧光轮和滤色轮的转速的检测,一般荧光轮和滤色轮的马达上均设置有标志mark作为检测参考点。具体的,该标志可以是设置在荧光轮和滤色轮上,也可以设置在其对应的转动电机上,只要能对应色轮的固定位置,可以起到检测色轮旋转状态即可。
93.参照图6,对应荧光轮和滤色轮分别设置有第一传感器和第二传感器;荧光轮对应设置有第一标志;滤色轮对应设置有第二标志。这个标志通常具有两个作用,一是用于探测色轮的转速,二是标志设置的位置通常与色轮颜色分区对齐,系统通过标志信号脉冲时刻的到来可以判断某种颜色的初始时刻。
94.在投影系统中标记的mark点,可被红外传感器感知到。以黑色标签作为标志,黑色标签据有低反射率,能够吸收红外探测光,黑色标签粘贴以外的其他表面为高反射率金属反射面或透过区域,红外传感器根据有无反射光产生脉冲信号。该脉冲信号是周期性的,因此,根据检测脉冲的频率,就可以实现监测马达转速和色轮颜色分区位置。
95.在一些实施例中,同步控制单元,还包括颜色控制单元;颜色控制单元,用于根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置,以及控制滤色轮转动至第二位置;其中,第一位置为自第一传感器检测到第一标志经过第一相对参数后到达的位置,第二位置为自第二传感器检测到第二标志经过第二相对参数到达的位置;其中,第一位置和第二位置对应颜色指示信号指示的颜色。
96.具体的,颜色指示信号为如图6所示的,dlp显示控制单元输出的led_sel(1:0)信号,并经过buffer缓冲器进行电压调整后,输送至同步控制单元。第一相对参数代表了某种颜色的起始时刻或者旋转角度与黑色标签形成的脉冲信号到来时刻的关系。举例说明,假
设黑色标签粘贴在蓝色和绿色的颜色边界处,颜色顺序为红色、绿色、蓝色,那么红色颜色到来的时刻可以是黑色标签脉冲到来时刻对应的参数ref加上或减去一个数值d1。d1即为第一相对参数,该数值可以是一段时间或者一定圆心角度。第一位置为以第一标志为基准经过一段时间或旋转过一定圆心角度后对应的位置,该位置对应颜色指示信号对应的颜色。
97.在实际应用过程中,标签会存在误差的问题,有误差就会导致两色轮并不一定在同一时刻到达预设的同一颜色边界处,也就是两色轮发生错位(错位是指即使初始标签都粘贴到同一颜色边界处,但是由于粘贴误差,导致两色轮的颜色边界在同一时刻并不完全对齐,也就是实际的颜色边界发生了错位,于是造成了混色现象。
98.因此,需要对dlp微型投影系统进行测试并调试。
99.在一些实施例中,前端处理模块,还用于对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;
100.同步控制单元,还用于根据调整指令,以荧光轮的第一标识参数为基准,调整滤色轮的第二标识参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相对关系,第二标识参数表征滤色轮在预定光色下的起始位置与第二标志所在位置之间的相对关系;同步控制单元,还用于获取当前第一标识参数和第二标识参数的第一参数差。
101.其中,待测的多种色光包括红色、绿色、蓝色、白色。第一标识参数对应荧光轮上各色区块开始的位置与第一标志的位置的相对参数,该相对参数在同步控制单元内存储有预设的默认值。当出现测试图像结果明显串色等情况,则需要进行人工调整。以荧光轮的第一标识参数为基准,调整滤色轮的第二标识参数,目的是为了对粘贴偏差进行补偿,使得滤色轮与荧光轮上的色区块对应上,以显示正确的颜色。
102.在一些实施例中,同步控制单元,还用于根据颜色指示信号指示的颜色,控制荧光轮转动至第一位置;同步控制单元,还用于根据颜色指示信号指示的颜色,控制滤色轮转动至第二修正位置;第二修正位置基于第二位置经过第一参数差的补偿获得。
103.具体的,第一参数差为滤色轮和荧光轮之间的相位差,通过调整该相位差,补偿第一标志和第二标志由于粘贴误差导致的颜色边界错位而带来的混色现象。通过调整滤色轮和荧光轮之间的相位差,使荧光轮与滤色轮上的色区对齐,输出准确的颜色。
104.在一些实施例中,前端处理模块,用于对测试图像进行解析,输出测试解析信号;其中,测试图像包括待测的多种光色;
105.同步控制单元,还用于根据调整指令,以荧光轮的第一标识参数为基准,调整dlp显示控制单元输出的颜色指示信号的信号参数,直至dlp微型投影系统当前投影显示的图像与测试图像一致;其中,第一标识参数表征荧光轮在预定光色下的起始位置与第一标志所在位置之间的相对位置,信号参数表征颜色指示信号的频率;
106.同步控制单元,还用于获取当前第一标识参数和颜色指示信号的信号参数之间的第二参数差。
107.具体的,如图6,以荧光轮的第一标识参数为基准,调整调整dlp显示控制单元输出的颜色指示信号的信号参数,目的是将激光开启的时刻与荧光轮上的颜色起始时刻对齐,以正常显色。
108.其中,参照图6,激光的开启受到转速控制单元的ld_en_out使能信号的控制。同步控制单元会根据两个色轮的转动状态和颜色指示信号,向前端信号处理单元输出mcu_ld_en使能信号;而转速控制单元会接收来自前端信号处理单元ext_ld_en使能信号、第一传感器输出的脉冲信号和第二传感器输出的脉冲信号。转速控制单元可根据脉冲信号计算出荧光轮和滤色轮的转速。考虑到激光是一束具有强能量的光,当照射在荧光轮和绿色轮上时,会使色轮发热。当色轮转速在某一速度阈值以上,则会良好的散热,不会损坏色轮。当色轮转速低于某一速度阈值时,则热量积累,有可能损坏色轮。当速度不够时,则转速控制单元控制不打开激光。
109.在一些实施例中,dlp显示控制单元,还用于根据解析信号,向同步控制单元和光源驱动单元输出经过第二参数差补偿的颜色指示信号。其中,第二参数差为颜色指示信号和荧光轮之间的相位差,通过调整该相位差,使激光开启时刻与色轮颜色开始时刻对齐,输出准确的颜色。
110.本技术提供的dlp微型投影系统,包括:前端处理模块、dlp显示控制单元、同步控制单元、光源驱动单元、激光光源、荧光轮和滤色轮;前端处理模块,用于对视频图像进行解析,输出解析信号;dlp显示控制单元,用于根据解析信号,向同步控制单元和光源驱动单元输出颜色指示信号;光源驱动单元,用于根据所颜色指示信号,驱动激光光源发光;以及,同步控制单元,用于控制荧光轮和滤色轮转动,以使激光光源发出的光经过荧光轮和滤色轮,输出颜色指示信号对应颜色的光。本技术采用单色激光、荧光轮和滤色轮相互配合发出基础色光,取代了三色led光源,进一步提高了dlp微型投影系统的亮度。
111.实施例三
112.图8为本技术提供的一种电子设备的结构示意图。如图8所示,电子设备包括:
113.处理器(processor)291,电子设备还包括了存储器(memory)292;还可以包括通信接口(communication interface)293和总线294。其中,处理器291、存储器292、通信接口293、可以通过总线294完成相互间的通信。通信接口293可以用于信息传输。处理器291可以调用存储器292中的逻辑指令,以执行上述实施例的方法。
114.此外,上述的存储器292中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。
115.存储器292作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序,如本技术实施例中的方法对应的程序指令/模块。处理器291通过运行存储在存储器292中的软件程序、指令以及模块,从而执行功能应用以及数据处理,即实现上述提供的方法。
116.存储器292可包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序;存储数据区可存储根据终端设备的使用所创建的数据等。此外,存储器292可以包括高速随机存取存储器,还可以包括非易失性存储器。
117.本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现上述提供的方法。
118.本技术实施例提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述提供的方法。
119.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或
者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由下面的权利要求书指出。
120.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求书来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1