设备登录终端、设备登录方法以及存储介质与流程
1.本发明涉及设备登录终端、设备登录方法以及存储设备登录程序的存储介质。
背景技术:
2.专利文献1记载了“将平板终端40的当前的位置信息作为传感器模块10的安装区域来输入”。
3.现有技术文献
4.专利文献1:日本专利公开公报特开2016-139227
技术实现要素:
5.(项目1)
6.在本发明的第一方式中提供设备登录终端。设备登录终端包括位置定位部,对自身的位置进行定位。设备登录终端包括定位方法存储部,存储对自身的位置进行定位的定位方法相关的信息。设备登录终端包括误差推断部,根据定位方法相关的信息,推断自身的位置中的定位误差。设备登录终端包括设备登录部,在使用自身的位置对作为登录对象的设备的位置进行登录时,将基于定位误差的设备的位置中的误差相关联地登录。
7.(项目2)
8.定位方法存储部存储表示定位方法中的定位方式的信息,误差推断部根据定位方式推断定位误差。
9.(项目3)
10.定位方法存储部存储表示定位方法中的版本的信息,误差推断部根据版本推断定位误差。
11.(项目4)
12.定位方法存储部存储表示定位方法中的过去的定位实绩的信息,误差推断部根据定位实绩推断定位误差。
13.(项目5)
14.设备登录终端还包括距离计测部,其对从自身的位置至设备为止的距离进行计测,设备登录部还使用距离对设备的位置进行登录。
15.(项目6)
16.设备登录终端还包括计测方法存储部,其存储用于计测距离的计测方法相关的信息,误差推断部根据计测方法相关的信息,推断距离中的计测误差,设备登录部将还基于计测误差的设备的位置中的误差相关联地登录。
17.(项目7)
18.设备登录终端还包括倾斜方位测定部,其测定在计测距离时的自身的倾斜和方位中的至少任意一方,设备登录部还使用倾斜和方位中的至少任意一方登录设备的位置。
19.(项目8)
20.设备登录终端还包括测定方法存储部,其存储用于测定倾斜和方位中的至少任意一方的测定方法相关的信息,误差推断部根据测定方法相关的信息,推断倾斜和方位中的至少任意一方中的测定误差,设备登录部将还基于测定误差的设备的位置中的误差相关联地登录。
21.(项目9)
22.测定方法存储部存储表示对测定方法的修正的信息的修正信息,误差推断部根据修正信息推断测定误差。
23.(项目10)
24.设备登录终端还包括补充信息取得部,其取得定位到自身的位置的场所相关的补充信息,设备登录部还登录补充信息。
25.(项目11)
26.位置定位部使用卫星定位系统对自身的位置进行定位。
27.(项目12)
28.位置定位部使用室内定位系统对自身的位置进行定位。
29.(项目13)
30.在本发明的第二方式中,提供设备登录方法。设备登录方法包括对自身的位置进行定位。设备登录方法包括存储对自身的位置进行定位的定位方法相关的信息。设备登录方法包括根据定位方法相关的信息,推断自身的位置中的定位误差。设备登录方法包括在使用自身的位置对作为登录对象的设备的位置进行登录时,将基于定位误差的设备的位置中的误差相关联地登录。
31.(项目14)
32.在本发明的第三方式中,提供存储有设备登录程序的存储介质。由计算机执行设备登录程序。计算机通过执行设备登录程序而发挥作为位置定位部的功能,其对自身的位置进行定位。计算机通过执行设备登录程序而发挥作为定位方法存储部的功能,其存储对自身的位置进行定位的定位方法相关的信息。计算机通过执行设备登录程序而发挥作为误差推断部的功能,其根据定位方法相关的信息,推断自身的位置中的定位误差。计算机通过执行设备登录程序而发挥作为设备登录部的功能,其在使用自身的位置对作为登录对象的设备的位置进行登录时,将基于定位误差的设备的位置中的误差相关联地登录。
33.另外,上述的发明的概要并未列举本发明的全部必要特征。此外,上述的特征组的下位组合也可以形成发明。
附图说明
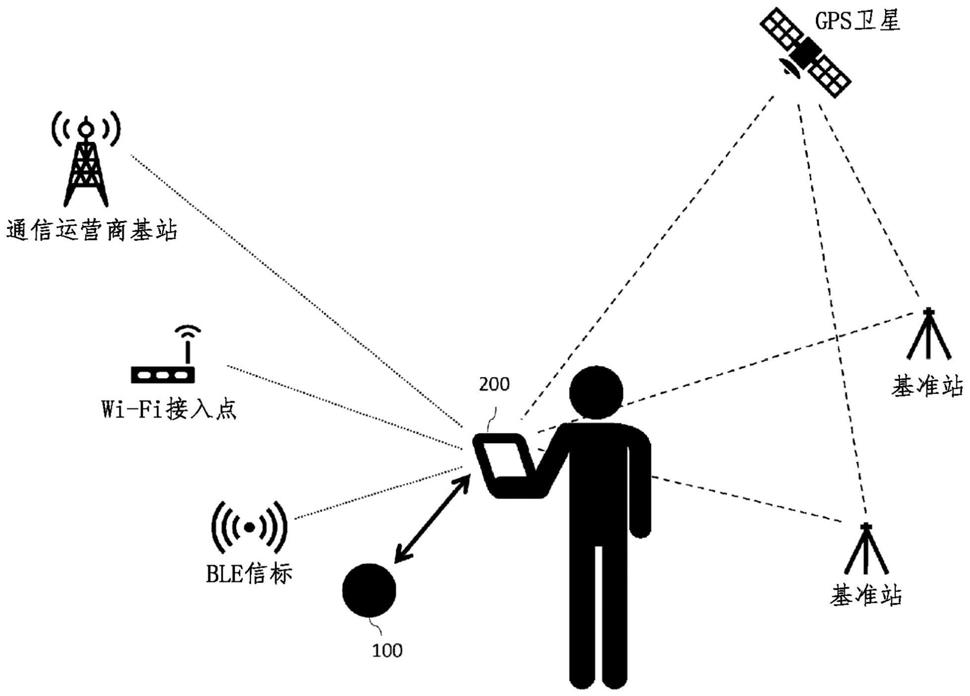
34.图1示意了使用本实施方式的设备登录终端200登录设备100的位置的状态。
35.图2表示了本实施方式的设备登录终端200的框图的一例。
36.图3表示了本实施方式的设备登录终端200存储的定位方法相关的信息的一例。
37.图4表示了使用本实施方式的设备登录终端200登录设备100的流程的一例。
38.图5表示了使用本实施方式的设备登录终端200登录的设备100的登录信息的一例。
39.图6表示了本实施方式的变形例的设备登录终端200的框图的一例。
40.图7表示了本实施方式的变形例的设备登录终端200存储的测定方法相关的信息的一例。
41.图8表示了使用本实施方式的变形例的设备登录终端200登录设备100的流程的一例。
42.图9表示了使用本实施方式的变形例的设备登录终端200登录的设备100的登录信息的一例。
43.图10表示了本实施方式的另一变形例的设备登录终端200的框图的一例。
44.图11表示了使用本实施方式的另一变形例的设备登录终端200登录的设备100的登录信息的一例。
45.图12表示了可整体或局部实现本发明的多个方式的计算机2200的示例。
46.附图标记说明
47.100 设备
48.200 设备登录终端
49.210 设备信息取得部
50.220 位置定位部
51.230 定位方法存储部
52.240 误差推断部
53.250 设备登录部
54.610 距离计测部
55.620
ꢀꢀ
计测方法存储部
56.630
ꢀꢀ
倾斜方位测定部
57.640
ꢀꢀ
测定方法存储部
58.1010 补充信息取得部
59.2200 计算机
60.2201 dvd-rom
61.2210 主控制器
62.2212 cpu
63.2214 ram
64.2216 图形控制器
65.2218 显示装置
66.2220 输入/输出控制器
67.2222 通信接口
68.2224 硬盘驱动器
69.2226 dvd-rom驱动器
70.2230 rom
71.2240 输入/输出芯片
72.2242 键盘
具体实施方式
73.以下,通过发明的实施方式说明本发明,以下的实施方式并非用以限定本发明的技术范围。此外,实施方式中说明的特征的组合的全部并非都是发明的必要解决手段。
74.图1示意了使用本实施方式的设备登录终端200登录设备100的位置的状态。设备登录终端200例如对自身的位置进行定位,并将工厂中设置的设备100的位置登录。此时,本实施方式的设备登录终端200,推断定位到的自身的位置的定位误差,并将基于推断的定位误差的设备100的位置中的误差相关联地登录。
75.这里,这种工厂例如在化学等的工业工厂以外,可以是管理控制气田和油田等井源及其周边的工厂,管理控制水力、火力、核电等的发电的工厂,管理控制太阳光和风力等的环境发电的工厂,以及管理控制上下水和堤坝等的工厂等。另外,上述的说明中,作为一例表示了设备登录终端200将设置在工厂中的设备100作为登录对象的情况,但是不限于此。设备登录终端200也可以将设置在与工厂不同的任何场所的设备100作为登录对象。
76.设备100可以是用于实现各种功能的所有工具、器具以及机械等,可以是进行电气性工作的装置,也可以是进行机械性工作的装置。作为一例,设备100可以是测定对象物理量的传感器。这种传感器例如可以是工厂中后来设置的iot(internet of things物联网)传感器。作为一例,传感器能取得对工厂中的振动、温度、湿度、照度、气味、气体浓度、压力、气压、应力、磁场、声音以及图像等物理量进行测定的测定数据。在后来设置这种传感器的情况下,为了准确把握工厂的状态而高效管理工厂,对设置的传感器的位置进行登录是十分重要的。另外,上述的说明中,例示了传感器为工厂中后来设置的iot传感器的情况,但是不限于此。例如,传感器可以是在ot(operational technology操作技术)区域中预先设置而未登录位置的过程控制(测定)用传感器等,也可以是与工厂中设置的一个或多个现场设备连接或一体构成的工业用(industrial)传感器等。以上,作为一例说明了设备100是工厂中设置的传感器的情况。但是不限于此。设备100可以包括阀门等的致动器和iot天线等的通信设备等所有工具、器具以及机械。
77.传感器设备登录终端200对自身的位置进行定位,并对设备100的位置进行登录。这里,设备登录终端200对自身的位置进行定位时,可以使用各种定位方法。这种定位方法例如可以包括采用gnss(global navigation satellite system全球导航卫星系统)以及rnss(regional navigation satellite system区域导航卫星系统)等卫星定位系统、室内定位系统、以及室内/外定位系统等的各种方法。这里,作为卫星定位系统,例如可以列举sbas(satellite-based augmentation system卫星增强系统),rtk(real time kinematic实时动态)-gps(global positioning system全球定位系统),dgps(differential gps差分全球定位系统)以及单独定位gps等。此外,作为室内定位系统,例如可以列举wifi certified location(wifi认证地点,注册商标)和ble(bluetooth(注册商标)low energy低功耗蓝牙)信标方式等。此外,作为室内/外定位系统,例如可以列举采用通信运营商的基站的信息的基站定位等。此外,定位方法还可以包括采用例如usbl(ultra short base line超短基线)等的水中定位系统的方法。
78.这样,作为对自身的位置进行定位的技术,存在各种定位方法。而且,这种定位方法分别具有不同的定位误差。本实施方式的设备登录终端200在对作为登录对象的设备100的位置进行登录时,将基于定位误差的设备100的位置中的误差相关联地登录,所述定位误
差如上所述按照每种定位方法而分别不同。
79.图2表示了本实施方式的设备登录终端200的框图的一例。设备登录终端200可以是pc(个人计算机)、平板型计算机、智能手机、工作站或通用计算机等计算机。此外,设备登录终端200可以在计算机内通过一个或多个可执行的虚拟计算机环境实现。取而代之,设备登录终端200可以是为了登录设备100而设计的专用计算机,也可以是由专用电路实现的专用硬件。此外,设备登录终端200可以通过各种方式实现。作为一例,设备登录终端200可以是平板型计算机这种由操作员直接操作的操作终端,也可以是无人机和rov(remote operated vehicle遥控运载器)这种由操作员远程操作的或自主运转的机器人终端等。
80.设备登录终端200具备设备信息取得部210、位置定位部220、定位方法存储部230、误差推断部240和设备登录部250。另外,上述模块是分别在功能上分离的功能模块,实际的设备结构不一定与此一致。即,在本图中,作为一个模块表示的,不一定由一个设备构成。此外,在本图中,作为分开的模块表示的,不一定由分开的设备构成。
81.设备信息取得部210取得表示与登录对象的设备100相关的信息的设备信息。例如,作为登录对象的设备100为传感器的情况下,作为设备信息,设备信息取得部210取得用于识别作为登录对象的传感器的识别信息(传感器id)、作为传感器的测定对象的物理量的类别、以及分配给传感器的网址等信息。
82.作为一例,设备信息取得部210可以是读码器,通过读取设备100上张贴或印刷的条形码或二维码等来取得设备信息。此外,设备信息取得部210可以是通信部(例如标签阅读器),通过和设备100(或张贴或内置于设备100的rf标签等)进行通信来取得设备信息。另外,在上述的说明中,例示了设备信息取得部210从设备100直接或间接地取得设备信息的情况,但是不限于此。设备信息取得部210可以通过从其他装置接收而取得设备信息,可以通过从各种存储设备等读出而取得设备信息,还可以通过接收用户输入而取得设备信息。设备信息取得部210将取得的设备信息供给至设备登录部250。
83.位置定位部220对自身的位置进行定位。位置定位部220例如可通过rtk-gps、dgps以及单独定位gps等对自身的位置进行定位。即,位置定位部220可以使用卫星定位系统对自身的位置进行定位。此外,位置定位部220可以通过例如基站定位等对自身的位置进行定位。即,位置定位部220可以使用室内/外定位系统对自身的位置进行定位。此外,位置定位部220可以通过例如wifi certified location和ble信标方式等对自身的位置进行定位。即,位置定位部220可以使用室内定位系统对自身的位置进行定位。由于上述的定位方法本身为众所周知的技术,所以这里省略说明。
84.位置定位部220可通过这样的各种定位方法中的一个或多个方法对自身的位置进行定位。位置定位部220将表示定位到的自身的位置的位置数据(例如坐标数据)供给至设备登录部250。此时,在能通过多个定位方法对自身的位置进行定位的情况下,位置定位部220将确定对自身的位置进行定位时使用的定位方法的确定信息,通知定位方法存储部230。
85.定位方法存储部230存储用于对自身的位置进行定位的定位方法相关的信息。例如,定位方法存储部230存储表示定位方法中的定位方式的信息。此外,定位方法存储部230存储表示定位方法中的版本的信息。此外,定位方法存储部230存储表示定位方法中的过去的定位实绩的信息。而且,在位置定位部220能通过多个定位方法对自身的位置进行定位的
情况下,定位方法存储部230针对多个定位方法分别存储表示定位方式的信息、表示版本的信息、表示定位实绩的信息等。
86.定位方法存储部230将定位方法相关的信息供给至误差推断部240。例如,从位置定位部220被供给了用于确定定位方法的确定信息的情况下,定位方法存储部230将通过该确定信息确定的定位方法相关的信息供给至误差推断部240。
87.误差推断部240根据定位方法相关的信息,推断自身的位置中的定位误差。例如,误差推断部240可以预先具有将定位方法相关的信息与定位误差相关联的查询表。而且,误差推断部240通过使用从定位方法存储部230供给的定位方法相关的信息对该查询表进行参照,确定对应的定位误差,并将该确定的定位误差推断为自身的位置中的定位误差。另外,上述的说明中,例示了误差推断部240预先具有查询表的情况,但是不限于此。也可以是误差推断部240如果从定位方法存储部230被供给定位方法相关的信息,则通过访问其他装置(例如互联网等),将定位方法相关的信息作为检索关键字进行检索,由此确定对应的定位误差。取而代之或在此基础上,误差推断部可以根据定位方法相关的信息中的定位实绩(例如,将定位实绩中的误差视为定位误差),推断定位误差。误差推断部240将包含推断的定位误差的误差信息供给至设备登录部250。
88.设备登录部250取得从设备信息取得部210供给的设备信息。此外,设备登录部250取得从位置定位部220供给的位置数据。此外,设备登录部250取得从误差推断部240供给的误差信息。而且,设备登录部250使用设备信息、位置数据以及误差信息将设备100登录。此时,设备登录部250使用表示自身的位置的位置数据,登录成为由设备信息表示的登录对象的设备100的位置信息。作为一例,设备登录部250将由位置数据表示的自身的位置坐标视为设备100的设置位置,把该设置位置作为设备100的位置来登录。取而代之或在此基础上,设备登录部250可以将对位置数据实施了预定的计算的结果视为设备100的设置位置,将该设置位置作为设备100的位置来登录。此外,设备登录部250可以将包含由位置数据表示的自身的位置坐标的区域视为设备100的设置位置,将该设置位置作为设备100的位置来登录。此时,在位置定位部220可通过多个定位方法对自身的位置进行定位的情况下,设备登录部250使用多个定位方法的定位结果来登录设备100的位置。
89.此外,此时设备登录部250在这样使用自身的位置来登录作为登录对象的设备100的位置时,将基于定位误差的设备100的位置中的误差相关联地登录。例如,设备登录部250将误差信息中包含的定位误差视为设备100的位置中的误差,将该误差与设备100的位置相关联地登录。取而代之或在此基础上,设备登录部250可以将对误差信息中包含的定位误差实施了预定的计算的结果视为设备100的位置中的误差,将该误差与设备100的位置相关联地登录。
90.设备登录部250在登录设备100时,可以通过将设备100的登录信息写入设备登录终端200自身所具有的数据库中,登录设备100。取而代之或在此基础上,设备登录部250可以通过将设备100的登录信息提供给具有设备登录用的数据库的其他装置(例如服务器),登录设备100。另外,这种设备100的位置可以不使用设备登录终端200来定位,而从外部直接登录。例如,在制造时和工程中,可以从cad数据等提取设置设备100的位置,将该位置预先登录为设备100的设置位置。
91.图3表示了本实施方式的设备登录终端200存储的定位方法相关的信息的一例。例
如,作为用于对自身的位置进行定位的定位方法相关的信息,定位方法存储部230可以存储本图中所示的信息。在本图中,例示了位置定位部220可通过6个定位方法对自身的位置进行定位的情况。此时,定位方法存储部230如本图所示,针对6个定位方法分别存储表示定位方法中的定位方式的信息。此外,定位方法存储部230如本图所示,针对6个定位方法分别存储表示定位方法中的版本的信息。此外,定位方法存储部230如本图所示,针对6个定位方法分别存储表示定位方法中的过去的定位实绩的信息。
92.如本图所示,位置定位部220可以使用卫星定位系统对自身的位置进行定位,可以使用室内定位系统对自身的位置进行定位,也可以使用室内/外定位系统对自身的位置进行定位。使用流程图具体说明采用这种设备登录终端200的设备100的登录处理。
93.图4表示了使用本实施方式的设备登录终端200登录设备100的流程的一例。例如,操作员带着可搬运的设备登录终端200去往设置了作为登录对象的设备100的场所,启动设备登录程序。
94.在步骤410中,设备登录终端200取得设备信息。例如,操作员将设备登录终端200的读码器放在设备100上张贴的二维码上。这样,设备信息取得部210根据读取二维码取得表示有关登录对象的设备100的信息的设备信息。作为一例,在登录对象的设备100为传感器的情况下,作为设备信息,设备信息取得部210取得用于识别传感器的识别信息(例如“传感器id:100a”)以及作为传感器的测定对象的物理量的类别信息(例如“类别:振动”)。设备信息取得部210将取得的设备信息供给至设备登录部250。
95.在步骤420中,设备登录终端200对自身的位置进行定位。例如,根据操作员为了定位当前的位置而按下“定位按钮”,设备登录终端200显示可使用的定位方法。而且,根据操作员从可使用的定位方法中选择了应在定位中使用的一种定位方法,位置定位部220使用被选择的定位方法对自身的位置进行定位。
96.作为一例,作为可使用的定位方法,设备登录终端200可以显示图3所示的定位方法相关的信息。接着例如操作员选择了“定位方法:1”的情况下,位置定位部220利用rtk-gps对自身的位置进行定位。而后,位置定位部220将表示定位到的自身的位置的位置数据(例如,“x坐标:xa,y坐标:ya,z坐标:za”)供给至设备登录部250。此外,位置定位部220将用于确定对自身的位置进行定位时采用的定位方法的确定信息(例如,“定位方法:1”)通知定位方法存储部230。
97.另外,上述的说明中,以操作员选择定位方法的情况作为一例,但是不限于此。设备登录终端200可以省略由操作员选择定位方法,而使用推荐的定位方法对自身的位置进行定位。
98.在步骤430中,设备登录终端200推断定位误差。例如在步骤420中,从位置定位部220被供给了用于确定对自身的位置进行定位时采用的定位方法的确定信息的情况下,定位方法存储部230将通过该确定信息确定的测定方法相关的信息供给至误差推断部240。作为一例,从位置定位部220被通知了作为确定信息的“定位方法:1”的情况下,定位方法存储部230将“rtk-gps”作为表示“定位方法:1”中的定位方式的信息、将“ver.1.3.8”作为表示“定位方法:1”中的版本的信息供给至误差推断部240。
99.而后,误差推断部240根据从定位方法存储部230供给的定位方法相关的信息,推断自身的位置中的定位误差。此时例如误差推断部240根据定位方式,推断定位误差。此外,
误差推断部240可以根据版本,推断定位误差。作为一例,误差推断部240在查询关键字的“定位方式”区域输入“rtk-gps”,在“版本”区域输入“ver.1.3.8”。这样,误差推断部240通过使用查询表,确定与输入的“定位方式”和“版本”对应的定位误差为例如
“±
5cm”,并将该确定的定位误差推断为自身的位置中的定位误差。误差推断部240将包含推断的定位误差的误差信息供给至设备登录部250。另外,上述的说明中,作为一例表示了误差推断部240根据定位方式和版本来推断定位误差的情况,但是不限于此。定位方法存储部230可以将
“±
〇cm”作为表示“定位方法:1”中的定位实绩的信息供给至误差推断部240。而且,误差推断部240根据定位实绩(例如,将定位实绩中的误差视为定位误差)推断定位误差。
100.在步骤440中,设备登录终端200对设备100进行登录。例如,设备登录部250分别取得在步骤410中供给的设备信息、在步骤420中供给的位置数据、以及在步骤430中供给的误差信息。而后,设备登录部250使用设备信息、位置数据以及误差信息将设备100登录。此时,设备登录部250使用表示自身的位置的位置数据,登录由设备信息表示的登录对象的设备100的位置信息。作为一例,设备登录部250将由位置数据表示的自身的位置坐标“x坐标:xa,y坐标:ya,z坐标:za”视为“传感器id:100a”和“类别:振动”的设备100a的设置位置,登录该设备100a。
101.此时,设备登录部250这样使用自身的位置来登录作为对象的设备的位置时,将基于定位误差的设备的位置中的误差相关联地登录。例如,设备登录部250将误差信息中包含的定位误差视为设备100的位置中的误差,把该误差与设备100的位置相关联地登录。作为一例,设备登录部250在误差信息中包含的定位误差为
“±
5cm”的情况下,合并登录设备100a的位置“x坐标:xa,y坐标:ya,z坐标:za”中的误差为
“±
5cm”。这样,设备登录终端200登录设备100。
102.图5表示了使用本实施方式的设备登录终端200登录的设备100的登录信息的一例。如本图所示,作为设备100的登录信息,设备登录终端200可以分别登录设备信息、位置信息以及误差信息。在本图中,表示了设备登录终端200登录的设备100a~设备100f(总称“设备100”)的登录信息。设备登录终端200例如登录了如下信息:作为测定振动的传感器的设备100a设置在“xa,ya,za”位置。这里在设备登录终端200中,由于登录设备100a时使用了“定位方法1”,所以合并登录了与定位方式“rtk-gps”和版本“ver.1.3.8”对应的定位误差
“±
5cm”。即,这表示设备100a位于“xa-5cm~xa+5cm,ya-5cm~ya+5cm,za-5cm~za+5cm”的范围中任意一处。
103.另外,上述的说明中,表示了定位误差相对于全部轴向相同的情况的一例,但是不限于此。例如,在相对于水平方向的定位误差和相对于垂直方向的定位误差不相同等,至少相对于某个轴向的定位误差不相同的情况下,误差推断部240可以分别推断相对于各轴的定位误差。而且,设备登录部250分别登录相对于各轴的定位误差。
104.同样,设备登录终端200例如登录了如下信息:作为测定温度的传感器的设备100b设置在“xb,yb,zb”位置。这里,由于设备登录终端200登录设备100b时使用了“定位方法2”,所以合并登录了与定位方式“dgps”和版本“ver.3.1.2”对应的定位误差
“±
5m”。同样,设备登录终端200例如登录了如下信息:作为测定湿度的传感器的设备100c设置在“xc,yc,zc”位置。这里,由于设备登录终端200登录设备100c时使用了“定位方法3”,所以合并登录了与定位方式“单独定位gps”和版本“ver.9.2.1”对应的定位误差
“±
20m”。同样,设备登录终端
200例如登录了如下信息:作为测定照度的传感器的设备100d设置在“xd,yd,zd”位置。这里,由于设备登录终端200登录设备100d时使用了“定位方法4”,所以合并登录了与定位方式“基站定位”和版本“ver.5.1.3”对应的定位误差
“±
50m”。同样,设备登录终端200例如登录了如下信息:作为测定气体浓度的传感器的设备100e设置在“xe,ye,ze”位置。这里,由于设备登录终端200登录设备100e时使用了“定位方法5”,所以合并登录了与定位方式“wifi certified location”和版本“ver.1.7.2”对应的定位误差
“±
2m”。同样,设备登录终端200例如登录了如下信息:作为测定磁场的传感器的设备100f设置在“xf,yf,zf”位置。这里,由于设备登录终端200登录设备100f时使用了“定位方法6”,所以合并登录了与定位方式“ble信标”和版本“ver.2.1.3”对应的定位误差
“±
5m”。
105.以往,将平板终端的位置信息作为传感器的安装区域而登录的技术已被公众所知。这里,作为对自身的位置进行定位的技术,如上所述存在各种定位方法。而且,这种定位方法分别具有不同的定位误差。可是,在现有的技术中,对于平板终端的位置信息中包含的定位误差没有任何考虑。对此,本实施方式的设备登录终端200在登录作为对象的设备100的位置时,将基于与定位方法对应的定位误差的设备100的位置中的误差相关联地登录。这样,按照本实施方式的设备登录终端200,可以通知操作员设备100的位置信息是包含了什么程度的误差登录的。这样,当为了进行电池更换等保养而查找设备100时,操作员可以按照每个设备100把握需要对哪个位置查探到什么范围。例如,在工厂等中以数年单位的间隔进行定期修理和保养。因此,其间定位技术会进步,操作员也会变化。在这种情况下,如果操作员因为进行保养时的定位误差为5cm左右,而从登录的位置查找半径5cm以内的范围,但是在登录设备100时的定位误差为5m的情况下,可能找不到设备100。即使在这种情况下,如果按照本实施方式的设备登录终端200,由于合并提供所登录的设备100的位置包含怎样的误差的信息,因此操作员可以相对容易地发现设备100。
106.此外,本实施方式的设备登录终端200存储表示定位方法中的定位方式的信息、表示版本的信息、表示过去的定位实绩的信息,因此根据该定位方式、版本、定位实绩来推断定位误差。通常,如果定位方式不同,则可能定位误差也不同。此外,即使定位方式相同,但如果版本不同,则可能定位误差不同。按照本实施方式的设备登录终端200,由于还考虑这种信息来推断定位误差,因此可以高精度地推断误差并登录。此外,按照本实施方式的设备登录终端200,因为还考虑过去的实绩来推断定位误差,所以能够遵循经验来推断误差并登录。
107.此外,本实施方式的设备登录终端200在对自身的位置进行定位时,使用卫星定位系统、室内/外定位系统以及室内定位系统。这样,按照本实施方式的设备登录终端200,不仅能够利用人工卫星对自身的位置进行全球定位,还可以在人工卫星定位困难的工厂和仓库内对自身的位置进行定位,所以还能够将设置在这种场所中的设备100作为登录对象。
108.图6表示了本实施方式变形例的设备登录终端200的框图的一例。在图6中,对于和图2具有相同功能和结构的构件标注相同的附图标记,并且除了以下不同点省略说明。上述的说明中例示了设备登录终端200仅使用表示自身的位置的位置数据来登录作为登录对象的设备100的位置信息的情况。可是,本变形例的设备登录终端200在自身的位置的基础上,在还考虑从自身的位置至设备100为止的距离以及计测该距离时的自身的倾斜和方位的情况下,登录作为登录对象的设备100的位置信息。本变形例的设备登录终端200还具备距离
计测部610、计测方法存储部620、倾斜方位测定部630和测定方法存储部640。
109.距离计测部610计测从自身的位置至作为登录对象的设备100为止的距离。距离计测部610例如根据与设备100之间通信的信号的接收信号强度,计测至设备100为止的距离。取而代之或在此基础上,距离计测部610例如根据向设备100照射的激光反射后返回为止的时间,计测至设备100为止的距离。此外,距离计测部610例如根据拍摄设备100的图像,计测至设备100为止的距离。此外,可以在设备100的附近临时设置计测用的发射器,距离计测部610通过和所述发射器进行通信来计测至设备100为止的距离。这样,即使在设备100不具备与设备登录终端200进行通信的通信单元的情况下,距离计测部610也可以计测至设备100为止的距离。距离计测部610能利用上述各种计测方法中的一个或多个方法计测至设备100为止的距离。距离计测部610将计测出的表示至设备100为止的距离的距离数据供给至设备登录部250。此时,在能利用多个计测方法计测至设备100为止的距离的情况下,距离计测部610将用于确定计测至设备100为止的距离时采用的计测方法的确定信息,通知计测方法存储部620。
110.计测方法存储部620存储与计测方法相关的信息,所述计测方法用于计测从自身的位置至作为登录对象的设备100为止的距离。例如,计测方法存储部620存储表示计测方法中的计测方式的信息。此外,计测方法存储部620存储表示计测方法中的版本的信息。此外,计测方法存储部620存储表示计测方法中的过去的计测实绩的信息。由于和定位方法存储部230相同,故省略对其进行说明。
111.计测方法存储部620将计测方法相关的信息供给至误差推断部240。例如,从距离计测部610被供给了用于确定计测方法的确定信息的情况下,计测方法存储部620将通过该确定信息确定的计测方法相关的信息供给至误差推断部240。
112.倾斜方位测定部630测定对从自身的位置至登录对象的设备100为止的距离进行计测时的自身的倾斜和方位中的至少任意一方。例如,倾斜方位测定部630使用3轴陀螺仪传感器测定自身的倾斜和方位。此外,倾斜方位测定部630使用将3轴加速度传感器与3轴陀螺仪传感器组合的6轴传感器模块测定自身的倾斜和方位。此外,倾斜方位测定部630还可以使用将3轴加速度传感器、3轴陀螺仪传感器与3轴罗盘传感器组合的9轴传感器模块测定自身的倾斜和方位。倾斜方位测定部630可利用上述各种测定方法中的一个或多个方法,测定自身的倾斜和方位。倾斜方位测定部630将测定的表示自身的倾斜和方位的倾斜方位数据供给至设备登录部250。此时,在能利用多个测定方法测定自身的倾斜和方位的情况下,倾斜方位测定部630将用于确定对自身的倾斜和方位进行测定时采用的测定方法的确定信息,通知测定方法存储部640。
113.测定方法存储部640存储测定方法相关的信息,所述测定方法用于测定自身的倾斜和方位中的至少任意一方。例如,测定方法存储部640存储表示测定方法中的设备的信息。此外,测定方法存储部640存储表示测定方法中的版本的信息。此外,测定方法存储部640存储表示测定方法中的过去的测定实绩的信息。在此基础上,测定方法存储部640可存储用于表示对测定方法的修正的信息的修正信息。通常,陀螺仪传感器的漂移误差随着时间而累积。此外,在工厂等金属较多的场所,地磁无法准确测定,存在产生误差的情况。因此,需要对测定方法进行修正。作为这种修正,例如可以使用采用互补滤波器和卡尔曼滤波器的修正或参照现有的标记(记号等)的修正等各种方式。在此,测定方法存储部640可以存
储表示上述对测定方法的修正的信息的修正信息。作为一例,测定方法存储部640存储表示对测定方法的修正的方式或进行了修正的最近时机的信息等,作为修正信息。
114.测定方法存储部640将测定方法相关的信息供给至误差推断部240。例如,在从倾斜方位测定部630被供给了用于确定测定方法的确定信息的情况下,测定方法存储部640将通过该确定信息确定的测定方法相关的信息供给至误差推断部240。
115.在本变形例中,误差推断部240还根据计测方法相关的信息,推断从自身的位置到登录对象的设备100为止的距离中的计测误差。此外,误差推断部240还根据测定方法相关的信息,推断倾斜和方位中的至少任意一方中的测定误差。此时,误差推断部240根据测定方法相关的信息中包含的修正信息,推断测定误差。误差推断部240将在推断的定位误差的基础上还包含计测误差和测定误差的误差信息供给至设备登录部250。
116.在本变形例中,设备登录部250还取得从距离计测部610供给的距离数据。此外,设备登录部250还取得从倾斜方位测定部630供给的倾斜方位数据。此外,设备登录部250从误差推断部240取得在定位误差的基础上还包含计测误差和测定误差的误差信息。而且,设备登录部250还使用从自身的位置至登录对象的设备100为止的距离,登录设备100的位置。此外,设备登录部250还使用计测至设备100为止的距离时的自身的倾斜和方位中的至少任意一方,登录设备100的位置。例如,设备登录部250把从由位置数据表示的自身的位置坐标向由倾斜方位数据表示的倾斜方向或方位恰好分离由距离数据表示的距离的位置,登录为设备100的位置。此时,设备登录部250将还基于计测误差的设备100的位置中的误差相关联地登录。此外,设备登录部250将还基于测定误差的设备100的位置中的误差相关联地登录。作为一例,设备登录部250可以将基于定位误差的误差、基于计测误差的误差、以及基于测定误差的误差分别相关联地登录。取而代之或在此基础上,设备登录部250也可以将基于定位误差的误差、基于计测误差的误差、以及基于测定误差的误差合计的总误差相关联地登录。
117.图7表示了本实施方式变形例的设备登录终端200存储的测定方法相关的信息的一例。例如,作为用于测定自身的倾斜和方位的测定方法相关的信息,测定方法存储部640存储如本图所示的信息。在本图中,表示了倾斜方位测定部630可由3个测定方法测定自身的倾斜和方位的情况的一例。此时,如本图所示,测定方法存储部640针对3个测定方法分别存储表示测定方法中的设备的信息。此外,测定方法存储部640存储表示测定方法中的版本的信息。此外,虽然在本图中省略图示,但测定方法存储部640可以存储表示测定方法中的过去的测定实绩的信息。此外,测定方法存储部640存储表示对测定方法的修正的信息的修正信息。作为这种修正信息,测定方法存储部640可以存储表示对测定方法的修正的方式和进行了修正的最近时机的信息等。使用流程图具体说明采用这种变形例的设备登录终端200的设备100的登录处理。
118.图8表示了使用本实施方式变形例的设备登录终端200登录设备100的流程的一例。至步骤820为止的处理,由于和图4中的步骤420的处理相同,这里省略说明。
119.在步骤830中,设备登录终端200计测至设备100为止的距离。例如,根据操作员为了计测距离而按下“计测按钮”,设备登录终端200显示可使用的计测方法。而后,根据操作员从可使用的计测方法中选择了在计测中应使用的一种计测方法,距离计测部610使用选择的计测方法,计测从自身的位置至登录对象的设备100为止的距离。例如,在操作员选择了“计测方法:2(激光)”的情况下,距离计测部610向设备100照射激光,根据照射的激光反
射后返回为止的时间,计测至设备100为止的距离。而后,距离计测部610将表示计测出的至设备100为止的距离的距离数据(例如“1.5m”)供给至设备登录部250。此外,距离计测部610将用于确定计测至设备100为止的距离时采用的计测方法的确定信息(例如“计测方法:2”)通知计测方法存储部620。
120.另外,上述的说明中,表示了操作员选择计测方法的情况的一例,但是不限于此。设备登录终端200可以省略由操作员选择计测方法,而使用推荐的计测方法来计测至设备100为止的距离。
121.在步骤840中,设备登录终端200测定自身的倾斜和方位。例如,根据操作员为了测定倾斜和方位而按下“测定按钮”,设备登录终端200显示可使用的测定方法。而后,根据操作员从可使用的测定方法中选择了在测定中应使用的一种测定方法,倾斜方位测定部630使用选择的测定方法,测定在计测从自身的位置至登录对象的设备100为止的距离时的自身的倾斜和方位中的至少任意一方。作为一例,作为可使用的测定方法,设备登录终端200显示如图7所示的测定方法相关的信息。接着例如在操作员选择了“测定方法:3(9轴)”的情况下,倾斜方位测定部630使用9轴传感器模块测定自身的倾斜和方位。而后,倾斜方位测定部630将表示测定的自身的倾斜和方位的倾斜方位数据供给至设备登录部250。此外,倾斜方位测定部630将用于确定在测定自身的倾斜和方位时采用的测定方法的确定信息(例如“测定方法:3”),通知测定方法存储部640。
122.另外,上述的说明中,表示了由操作员选择测定方法的情况的一例,但是不限于此。设备登录终端200可以省略由操作员选择测定方法,而使用推荐的测定方法来测定自身的倾斜和方位。
123.在步骤850中,设备登录终端200在推断定位误差的基础上,还推断计测误差和测定误差。例如,在步骤830中,从距离计测部610被供给了用于确定计测至设备100为止的距离时采用的计测方法的确定信息的情况下,计测方法存储部620将通过该确定信息确定的计测方法相关的信息供给至误差推断部240。同样,在步骤840中,从倾斜方位测定部630被供给了用于确定在测定自身的倾斜和方位时采用的测定方法的确定信息的情况下,测定方法存储部640将通过该确定信息确定的测定方法相关的信息供给至误差推断部240。
124.而后,误差推断部240根据从计测方法存储部620供给的计测方法相关的信息,推断至设备100为止的距离中的计测误差。同样,误差推断部240根据从测定方法存储部640供给的测定方法相关的信息,推断自身的倾斜和方位中的测定误差。此时,误差推断部240根据测定方法相关的信息中包含的修正信息推断测定误差。计测误差和测定误差的推断由于和定位误差的推断相同,所以这里省略说明。误差推断部240将在推断的定位误差的基础上还包含计测误差和测定误差的误差信息,供给至设备登录部250。
125.在步骤860中,设备登录终端200将设备100登录。例如,设备登录部250分别取得在步骤810中供给的设备信息,在步骤820中供给的位置数据,在步骤830中供给的距离数据,在步骤840中供给的倾斜方位数据以及在步骤850中供给的误差信息。而后,设备登录部250使用设备信息、位置数据、距离数据、倾斜方位数据以及误差信息将设备100登录。此时,设备登录部250使用表示自身的位置的位置数据,录登由设备信息表示的登录对象的设备100的位置信息。此外,设备登录部250还使用从自身的位置至登录对象的设备100为止的距离,登录设备100的位置。此外,设备登录部250还使用在计测至设备100为止的距离时的自身的
倾斜和方位中的至少任意一方,登录设备100的位置。例如,设备登录部250将从由位置数据表示的自身的位置坐标向由倾斜方位数据表示的倾斜方向和方位恰好分离由距离数据表示的距离的位置,登录为设备100的位置。
126.此时,设备登录部250将还基于计测误差的设备100的位置中的误差相关联地登录。此外,设备登录部250将还基于测定误差的设备100的位置中的误差相关联地登录。作为一例,设备登录部250将基于定位误差的误差、基于计测误差的误差以及基于测定误差的误差分别相关联地登录。取而代之或在此基础上,设备登录部250将对基于定位误差的误差、基于计测误差的误差以及基于测定误差的误差进行合计的总误差相关联地登录。这样,本变形例的设备登录终端200登录设备100。
127.图9表示了使用本实施方式变形例的设备登录终端200登录的设备100的登录信息的一例。如本图所示,作为误差信息,本变形例的设备登录终端200将基于定位误差的误差、基于计测误差的误差以及基于测定误差的误差分别相关联地登录。此外,设备登录终端200将对基于定位误差的误差、基于计测误差的误差以及基于测定误差的误差进行合计的总误差相关联地登录。此时,设备登录终端200在登录这种总误差时,可以针对各轴向分别登录总误差。
128.本变形例的设备登录终端200,进一步使用从自身的位置至设备100为止的距离、计测该距离时的自身的倾斜和方位来登录设备100的位置。这样,按照本变形例的设备登录终端200,不是将自身的位置视为设备100的设置位置,而是可以通过大体确定设备100设置在从自身的位置向哪个方向分离什么程度的位置,并登录设备100的位置。这样,通过除了考虑了位置以外,还考虑了距离、倾斜、方位,本变形例的设备登录终端200能确定设备100的三维坐标并登录。
129.此外,本变形例的设备登录终端200,根据计测距离的计测方法相关的信息和测定倾斜和方位的测定方法相关的信息,推断计测误差和测定误差,将基于该计测误差和测定误差的设备100的位置中的误差也相关联地登录。这样,按照本变形例的设备登录终端200,在进一步使用距离、倾斜和方位来登录设备100的位置时,可以包含距离中的计测误差以及倾斜和方位中的测定误差来登录误差信息。
130.此外,作为测定方法相关的信息,本变形例的设备登录终端200存储表示对测定方法的修正的信息的修正信息,并根据该修正信息推断测定误差。通常,即使使用同一测定设备,只要修正的状况不同,则得到的测定误差不同。按照本变形例的设备登录终端200,由于还考虑这种信息来推断测定误差,所以能够高精度地推断误差并登录。
131.图10表示了本实施方式另一变形例的设备登录终端200的框图的一例。在图10中,对于和图2具有相同功能和结构的构件标注相同的附图标记,除了以下不同点省略说明。本另一变形例的设备登录终端200,还具备补充信息取得部1010。另外,在本图中,表示了图2所示的实施方式的设备登录终端200还具备补充信息取得部1010的情况的一例,但是图6所示的实施方式的变形例的设备登录终端200也可以具备补充信息取得部1010。
132.补充信息取得部1010取得定位到自身的位置的场所相关的补充信息。补充信息取得部1010可以通过例如接受用户输入而取得补充信息,可以通过从其他装置接收而取得补充信息,还可以通过拍摄图像而取得补充信息。补充信息取得部1010将取得的补充信息供给至设备登录部250。
133.在本另一变形例的设备登录终端200中,设备登录部250将从补充信息取得部1010供给的补充信息进一步登录为登录信息。
134.图11表示了使用本实施方式的另一变形例的设备登录终端200登录的设备100的登录信息的一例。在图10中,针对和图5相同的项目和参数标注相同的附图标记,除了以下不同点省略说明。如本图所示,本另一变形例的设备登录终端200将设备信息、位置信息以及误差信息再加上补充信息作为登录信息来登录。设备登录终端200例如将“升降口的上方1.5m”、“配管x的背后”以及“泵y的附近”等,用于更具体地确定为了登录设备100的位置而定位到的自身位置的场所的信息,作为补充信息登录。此外,设备登录终端200可以将例如定位到自身的位置时的现场的照片等信息作为补充信息登录。此外例如参照现有的标记(记号)修正测定方法的情况下,设备登录终端200可以将有关标记的信息作为补充信息登录。
135.本另一变形例的设备登录终端200,取得定位到自身的位置的场所相关的补充信息并登录。这样,按照本另一变形例的设备登录终端200,可以提供用于更具体地确定设备100的位置的信息。
136.这样,按照本实施方式的设备登录终端200,登录作为登录对象的设备100的位置时,将误差相关联地登录,而这种误差会根据对位置进行定位的方法、计测距离的方法、测定倾斜和方位的方法,在各种范围上变化。这种变化不仅包括伴随技术的进步而向误差降低的方向变化的情况,也包括向误差增加的方向变化的情况。例如,存在如下情况:尽管以往可以利用dgps对位置进行高精度定位,但是当前因障碍物的影响得不到dgps基准站的补充状态,而不得不用单独定位gps进行定位。设备登录终端200还具备在这样的当前的误差大于过去的误差的情况下,通知该情况的通知部(例如警报)。这样,按照设备登录终端200,可以通知操作员推断出的误差大于过去的误差。
137.此外,本发明的各种实施方式可以参照流程图和框图进行记载,在此模块可以表示(1)执行操作的过程的阶段或(2)具有执行操作的作用的装置的部分。特定的阶段和部分可以通过专用电路、与存储在计算机可读介质上的计算机可读指令一起供给的可编程电路和/或与存储在计算机可读介质上的计算机可读指令一起供给的处理器来实现。专用电路可以包括数字和/或模拟硬件电路,也可以包括集成电路(ic)和/或分立电路。可编程电路可以包括可重构硬件电路,该可重构硬件电路包括逻辑and、逻辑or、逻辑xor、逻辑nand、逻辑nor和其他逻辑操作、触发器、寄存器、现场可编程门阵列(fpga)、可编程逻辑阵列(pla)等存储器元件等。
138.计算机可读介质可以包括能够存储由适当的设备执行的指令的任意的有形设备,其结果,具有存储在其中的指令的计算机可读介质包括包含为了制作用于执行由流程图或框图指定的操作的手段而能够执行的指令的产品。作为计算机可读介质的例子可以包括:电子存储介质、磁存储介质、光存储介质、电磁存储介质、半导体存储介质等。作为计算机可读介质的更具体的例子可以包括:软(注册商标)盘、磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存器)、电可擦除可编程只读存储器(eeprom)、静态随机存取存储器(sram)、光盘只读存储器(cd-rom)、数字多用途盘(dvd)、蓝光(rtm)碟、存储棒、集成电路卡等。
139.计算机可读指令包括由包括汇编指令、指令集架构(isa)指令、机器指令、机器相
rom2201)、ic卡等那样的外部记录介质的文件或数据库的全部或必要的部分读取到ram2214,并对ram2214上的数据执行各种类型的处理。接着,cpu2212将处理后的数据写回到外部记录介质。
149.如各种类型的程序、数据、表和数据库那样的各种类型的信息可以存储于记录介质并接受信息处理。cpu2212对从ram2214读取的数据执行本公开各处记载的各种类型的处理并将结果写回到ram2214,该各种类型的处理包括由程序的指令序列指定的各种类型的操作、信息处理、条件判断、条件分支、无条件分支、信息的检索/置换等。此外,cpu2212可以检索记录介质内的文件、数据库等中的信息。例如,在分别具有与第二属性的属性值相关联的第一属性的属性值的多个条目存储在记录介质内的情况下,cpu2212可以从该多个条目中检索与指定第一属性的属性值的条件一致的条目,并且读取存储在该条目内的第二属性的属性值,由此获取与满足预先确定的条件的第一属性相关联的第二属性的属性值。
150.以上说明的程序或软件模块可以存储在计算机2200上或计算机2200附近的计算机可读介质中。此外,在与专用通信网络或互联网连接的服务器系统内提供的硬盘或ram那样的记录介质能够用作计算机可读介质,由此,经由网络将程序提供给计算机2200。
151.以上,利用实施方式对本发明进行了说明,但是本发明的技术范围并不限定于上述实施方式记载的范围。对本领域技术人员而言能够对上述实施方式进行各种变更或改良是显而易见的。根据权利要求书的记载可知,进行了这种变更或改良的方式也可以包含于本发明的技术范围。
152.在权利要求书、说明书和附图中所示的装置、系统、程序和方法中的动作、过程、步骤和阶段等各处理的执行顺序没有特别明示为“更早”、“之前”等,此外,应注意的是只要在后一处理中没有使用前一处理的输出,则能够以任意的顺序实现。关于权利要求书、说明书和附图中的动作流程,即使为了便于说明而使用“首先,”、“接着,”等进行了说明,也不意味着必须按照该顺序实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1