基于信号强度的天线自动调高管理方法与流程
1.本发明属于通信信号管理技术领域,具体涉及一种基于信号强度的天线自动调高管理方法。
背景技术:
2.基于卫星导航定位系统的无边界智能割草机主要包含流动站和基站(如rtk基站)两部分。流动站与基站通过多频定位天线接收不同卫星系统频段的定位信号。rtk基站将已知测站的精密坐标和接收的卫星信息直接或经过处理后实时发送各位流动站接收机,流动站接收机在接收卫星观测值的同时也接收到基站的信息,进行rtk定位解算,以此实现rtk定精度定位。在此过程中需要rtk基站和流动站实时观测的共视卫星数量保持在一定数量,因此接收的卫星数量越多越好。
3.在流动站和基站的通信主要使用无线射频通信,如图1所示(图1中1表示基站位置,2表示机器位置),当存在直线通信障碍时,通信距离会相应的衰减,地面吸收、反射无线电波,靠近地面通信效果差,现有的智能割草机流动站使用的天线和基准站使用过的通信天线在设计上是固定位置固定高度。基站卫星天线也是固定高度。
4.当机器与基站通信距离较远,地面高低起伏(如图1所示),基站和机器不在可视情况下通信,机器和基站的可靠通信距离会快速下降。
5.由于安规要求,机器割草刀盘一般放置在机器下方罩壳内部,智能割草机充电站附近的草不易被修剪,可能会导致安装在充电站附近的基站高精度天线被植被覆盖、遮挡,导致接收的卫星数变少,影响基站定位可靠性。
6.由于无线电标准中对割草机设备的无线发射功率有限制,所以在无线发射功率达到标准上限的条件下,可用于优化通信质量的方案有限。
技术实现要素:
7.本发明的目的在于提供一种基于信号强度的天线自动调高管理方法以有效提高割草机流动站和基站卫星接收能力和通信可靠性。
8.实现本发明目的的技术解决方案为:
9.一种基于信号强度的天线自动调高管理方法,当机器与基站之间的通信信号强度被判定为弱时,将机器流动站上的天线和/或基站上的天线高度调高。
10.进一步地,机器与基站之间的通信信号强度被判定为弱的方法为:机器与基站进行通信时,将机器端接收数据时的实时信号强度数据a通过无线通信的方式发送给基站,同时基站在接收机器端的数据时也会得到一个机器端信号发送强度数据b,当a和b其中任意一个数据落在通信信号弱的范围时,则机器与基站之间的通信信号强度被判定为弱。
11.进一步地,在将机器流动站上的天线高度调高的过程中,间隔预定时间判断一次信号强度数据是否在安全通信范围内。
12.进一步地,机器与基站之间使用蓝牙芯片进行无线通信,根据蓝牙芯片接收的
rssi信号强度值进行等级划分,将-75dbm到-92dbm定为通信信号弱的范围,将大于-75dbm定为安全通信范围。
13.进一步地,当蓝牙芯片接收的rssi信号强度值在设定时间内一直位于安全通信范围时,将机器流动站上的天线高度降低。
14.进一步地,当使用rtk基站对机器的位置进行定位时,若出现以下至少一种情况则进行rtk基站天线的调高操作:
15.(1)基站通过记录判断固定时间段内卫星接收数据总数平均值及信噪比平均值,卫星接收数据总数平均值及信噪比平均值数据低于前期时间段平均值;
16.(2)基站通过在固定时间段内跟踪多个固定编号的地球静止轨道卫星的信噪比数据并求出信噪比数据平均值,信噪比数据平均值低于前期时间段平均值;
17.(3)基站通过在固定时间段跟踪记录地球同步轨道卫星的信噪比数据并求出信噪比数据平均值,当信噪比数据平均值低于前期时间段平均值,
18.所述前期时间段为在所述固定时间段之前的设定时间段。
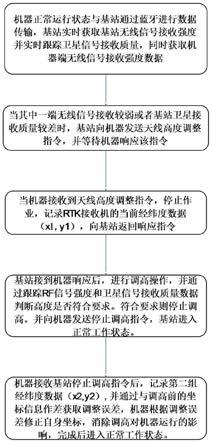
19.进一步地,rtk基站天线的调高操作包括以下步骤:
20.步骤(1):基站通知机器即将启动基站上的天线调高,机器在接到此通知时,停止作业并停在原地,记录当前一段时间内的定位数据,并根据调高前rtk基站分别对rtk接收机输出的经纬度数据求出第一平均值记录为(x1,y1),完成此操作后,应答基站,机器已完成高度调整准备;
21.步骤(2):基站进行天线调高操作,并通过对跟踪的卫星信号接收质量的数据进行处理,判断当前卫星接收质量是否有优化,在达到要求时,停止调高,若没有达到要求,则将高度调整到最高位置,并将基站上的天线停止调高的信息发送给机器,机器将调整后的基站作为参考站,分别对rtk接收机输出的经纬度数据求出第二平均值记录为(x2,y2),基站进入正常工作状态;
22.步骤(3):机器通过将(
△
x,
△
y)为基站天线升高前后的差值,其中
△
x=(x2-x1),
△
y=(y2-y1),将已经创建的地图数据每个坐标点位分别加上(
△
x,
△
y),消除基站天线升高对机器运行的影响,并重新将地图数据保存,机器进入正常工作状态。
23.进一步地,所述步骤(2)中基站天线停止调高的条件为:高度调整以10cm为一个刻度进行,并在每个高度保持3分钟,观察卫星接收质量优化情况,符合要求则在当前高度停止。
24.进一步地,所述机器流动站上的天线为rf天线。
25.进一步地,所述机器为智能割草机。
26.本发明与现有技术相比,其显著优点为:
27.1、本发明通过无线接收信号强度rssi调整基站和割草机无线通信天线的高度,通过接收卫星颗数调整基站的卫星接收天线高度,通过rf天线和gps天线高度的动态调整,解决割草机系统在凹凸不平的草地上通信路径被遮挡的问题;
28.2、本发明可以根据智能割草机工作状态调整基站定位天线和无线通信天线高度,以解决机器在非工作状态时,天线高高伸出草地,对视觉环境的影响的问题,如机器和基站在智能割草机启动割草作业前进行天线调高操作,在智能割草机完成割草作业后,将天线调低;
29.3、由于定位天线高度的调整,可能导致定位精度有偏差,本发明还相应提供了在天线自动调高过程中的机器定位精度补偿算法,以进一步完善天线调高管理精度和实用性。
30.下面结合附图和具体实施方式对本发明作进一步的详细描述。
附图说明
31.图1为本发明基站和机器的位置示意图。
32.图2为本发明基站定位天线和通信天线同时调整流程图。
33.图3为基站示意图。
34.图4为基站rtk单元相对于机器中定位元件之间的距离由于高度差改变而产生变化的示意图。
35.图5为基站rtk单元相对于机器中定位元件之间的距离由于高度差和水平偏移改变而产生变化的示意图。
具体实施方式
36.本实例中机器和基站使用2.4ghz蓝牙芯片进行无线数据收发(无线收发设备可使用wifi、ble、zigbee等),如图1所示(图1中1表示基站位置,2表示机器位置),根据通过蓝牙芯片获取的无线信号强度rssi的实际数值进行无线通信天线高度的调整。蓝牙的接收灵敏度在-90dbm左右,如蓝牙芯片nrf52832的接收灵敏度为-96dbm。
37.实际调试中根据蓝牙芯片接收的rssi信号强度值进行等级划分,可以将-75dbm到-92dbm定为无线通信信号弱,将-50dbm到-75dbm定为信号强度一般,将》-50dbm信号强度定为信号优。定义信号强度一般和信号优为安全通信的强度范围。
38.rssi(received signal strength indication)接收的信号强度指示,无线发送层的可选部分,用来判定链接质量,以及是否增大广播发送强度。通过接收到的信号强弱测定信号点与接收点的距离。
39.结合图2,机器与基站在进行通信时,可以将机器端接收数据时的实时信号强度数据a通过无线通信的方式发送给基站,同时基站在接收机器端的数据时也会得到一个机器端信号发送强度b,当a和b其中任意一个数据落在通信信号弱的范围时,基站即可启动rf天线调高的动作,并在缓慢的天线调高过程中,间隔一定时间判断一次信号强度数据是否在安全通信范围内。
40.当信号强度长时间大于-50dbm时,可以考虑将天线高度降低,减少天线对草地视觉环境的影响。
41.由于定位天线高度的调整,可能导致定位精度有偏差,本发明提供一种在天线自动调高过程中的机器定位精度补偿算法。
42.在使用rtk技术进行智能割草机的位置进行定位时,由于天上卫星是实时变化的。可以根据下面几种方案判断是否需要进行rtk基站天线的升高操作,若出现以下至少一种情况则进行rtk基站天线的调高操作。
43.(1)基站通过记录判断固定时间段内卫星接收数据总数平均值及信噪比平均值,卫星接收数据总数平均值及信噪比平均值数据低于前期时间段平均值;
44.(2)基站通过在固定时间段内跟踪多个固定编号的地球静止轨道卫星的信噪比数据并求出信噪比数据平均值,信噪比数据平均值低于前期时间段平均值;
45.(3)基站通过在固定时间段跟踪记录地球同步轨道卫星的信噪比数据并求出信噪比数据平均值,当信噪比数据平均值低于前期时间段平均值,
46.所述前期时间段为在所述固定时间段之前的设定时间段,例如在该固定时间段之前的一个星期或一个月的数据平均值,该设定时间段可以根据实际情况具体设定和选择。
47.本实施例中基站如图3所示,基站4上的rtk单元3可以上下移动,调节高度。当基站判断需要进行定位天线调高操作时,需要进行以下步骤。
48.1.基站通过无线传输告知智能割草机基站即将启动天线调高,智能割草机在接到此通知时,停止作业并停在原地,记录当前一段时间内的定位数据,并根据调高前rtk基站分别对rtk接收机输出的经纬度数据求出平均值记录为(x1,y1),使用平均值可以减小定位误差。完成此操作后,应答基站,机器已完成高度调整准备。
49.2.基站进行调高操作,将rtk单元3调高,并通过对跟踪的卫星信号接收质量的相关数据进行处理,判断当前卫星接收质量是否有优化,在达到要求时,停止调高,例如高度调整可以10cm为一个刻度进行,并在每个高度保持3分钟,观察优化情况,符合要求则在当前高度停止。若没有达到要求,则将高度调整到最高位置。并将基站停止调高的信息发送给智能割草机。智能割草机将调整后的基站作为参考站,分别对rtk接收机输出的经纬度数据求出平均值记录为(x2,y2),基站进入正常工作状态。
50.智能割草机通过将
△
x=(x2-x1),
△
y=(y2-y1),(
△
x,
△
y)为天线升高前后的差值,将已经创建的地图数据每个坐标点位分别加上(
△
x,
△
y),即可消除基站天线升高对机器运行的影响,并重新将地图数据保存,机器进入正常工作状态。
51.在具体的高度调节过程中,由于rtk单元3高度发生变化,在基站4和机器位置均不变的情况下,基站上rtk单元3相对于机器中定位元件之间的距离会由于高度差改变而产生变化,该变化会导致机器坐标数据发生偏移。
52.图4以机器坐标(x、y)中的x坐标为例进行说明。基站4在固定后,通常以基站作为基准点,此时基站坐标为基准坐标,在确定基站基准坐标即坐标轴指向后,根据基站上rtk单元和机器中定位单元之间的数据交换确定定位单元坐标,进而得到机器位置坐标。其测得机器相对于基站之间的距离实际为基站rtk单元相对于机器定位单元之间的距离。假设rtk单元在初始位置,此时机器在某一位置x坐标值为x0,由图4可知,当rtk单元3位于h1、h2两个不同的高度上时,在默认基站rtk单元坐标不变的情况下,机器实际坐标应该分别为x1和x2,其相对于初始状态下坐标值x0发生了变化。
53.由图4可知,在知道基站rtk单元初始高度、机器中定位单元离地高度的情况下,基站rtk单元调节后高度的情况下,可以在初始状态下坐标值x0的基础上,计算出对应的x1和x2。下面提供一个理想状态下的计算方式:
54.假设rtk单元初始高度为h’,机器定位单元离地高度h0,机器x坐标初始坐标值x0,则:
55.[x
12-(h
1-h0)2]=(x
02-|h'-h0|2)
[0056]
通过上式可以计算出x1的具体数值。
[0057]
同理,当rtk调节后高度变更为h2时,可以替换上式中相应参数,计算得到x2的数
值。同样地,y值也可以采用上述计算方法算出。
[0058]
该情况下当基站判断需要进行定位天线调高操作时,需要进行以下步骤。
[0059]
1、基站通过无线传输告知智能割草机基站即将启动天线调高,智能割草机在接到此通知时,停止作业并停在原地,记录当前一段时间内的定位数据,并根据调高前rtk基站分别对rtk接收机输出的经纬度数据求出平均值记录为(x0,y0),使用平均值可以减小定位误差。完成此操作后,应答基站,机器已完成高度调整准备。
[0060]
2、基站进行调高操作,并通过对跟踪的卫星信号接收质量的相关数据进行处理,判断当前卫星接收质量是否有优化,在达到要求时,停止调高,例如高度调整可以10cm为一个刻度进行,并在每个高度保持3分钟,观察优化情况,符合要求则在当前高度停止。若没有达到要求,则将高度调整到最高位置。并将基站停止调高的信息以及rtk单元实际高度变化信息,发送给智能割草机。
[0061]
3、根据rtk单元实际高度变化信息,在初始坐标(x0,y0)基础上,计算出调高后坐标(x1,y1),并使用(x1,y1)对初始坐标(x0,y0)进行覆盖。
[0062]
4、对地图中所有初始坐标进行步骤3的覆盖动作。
[0063]
采用上述步骤,可以在rtk单元高度变化后,对地图数据进行准确的更新。
[0064]
在实际使用过程中,rtk单元调高过程中,可能产生水平偏移,如图5所示,偏移后,会导致坐标平行飘移,导致通过高度计算出来的坐标不准确,在使用过程中,为了解决上面问题,提供下面这种地图数据更新方法:
[0065]
当基站判断需要进行定位天线调高操作时,需要进行以下步骤。
[0066]
1、基站通过无线传输告知智能割草机基站即将启动天线调高,智能割草机在接到此通知时,停止作业并停在原地,记录当前一段时间内的定位数据,并根据调高前rtk基站分别对rtk接收机输出的经纬度数据求出平均值记录为(x0,y0),使用平均值可以减小定位误差。完成此操作后,应答基站,机器已完成高度调整准备。
[0067]
2、基站进行调高操作,并通过对跟踪的卫星信号接收质量的相关数据进行处理,判断当前卫星接收质量是否有优化,在达到要求时,停止调高,例如高度调整可以10cm为一个刻度进行,并在每个高度保持3分钟,观察优化情况,符合要求则在当前高度停止。若没有达到要求,则将高度调整到最高位置。并将基站停止调高的信息以及rtk单元实际高度变化信息,发送给智能割草机。
[0068]
3、根据rtk单元实际高度变化信息,在初始坐标(x0,y0)基础上,计算出调高后坐标(x1,y1)。使用(x1,y1)替换初始坐标(x0,y0),并对地图中所有数据进行计算,以计算后的坐标替换初始坐标。
[0069]
4、智能割草机将调整后的基站作为参考站,分别对rtk接收机输出的经纬度数据求出平均值记录为(x2,y2),基站进入正常工作状态。
[0070]
5、智能割草机通过将
△
x=(x2-x1),
△
y=(y2-y1),当
△
x和
△
y均小于预设误差阈值时,地图数据更新结束。当
△
x和
△
y其中至少一个大于等于预设误差阈值时,以(
△
x,
△
y)为天线升高前后的差值,将步骤3中替换后的地图数据每个坐标点位的坐标分别加上(
△
x,
△
y),并重新将地图数据保存,机器进入正常工作状态。
[0071]
用户在使用时,可能会轻微移动基站位置,亦或是取下rtk单元,导致rtk单元发生较大位移,为了应对这种情况,采用下面这种地图数据更新方法:
[0072]
当基站判断需要进行定位天线调高操作时,需要进行以下步骤。
[0073]
1、基站通过无线传输告知智能割草机基站即将启动天线调高,智能割草机在接到此通知时,停止作业并停在原地,记录当前一段时间内的定位数据,并根据调高前rtk基站分别对rtk接收机输出的经纬度数据求出平均值记录为(x0,y0),使用平均值可以减小定位误差。完成此操作后,应答基站,机器已完成高度调整准备。
[0074]
2、基站进行调高操作,并通过对跟踪的卫星信号接收质量的相关数据进行处理,判断当前卫星接收质量是否有优化,在达到要求时,停止调高,例如高度调整可以10cm为一个刻度进行,并在每个高度保持3分钟,观察优化情况,符合要求则在当前高度停止。若没有达到要求,则将高度调整到最高位置。并将基站停止调高的信息以及rtk单元实际高度变化信息,发送给智能割草机。
[0075]
3、根据rtk单元实际高度变化信息,在初始坐标(x0,y0)基础上,计算出调高后坐标(x1,y1)。
[0076]
4、智能割草机将调整后的基站作为参考站,分别对rtk接收机输出的经纬度数据求出平均值记录为(x2,y2),基站进入正常工作状态。
[0077]
5、智能割草机通过将
△
x=(x2-x1),
△
y=(y2-y1),当
△
x和
△
y均小于预设误差阈值时,使用(x1,y1)替换初始坐标(x0,y0),并对地图中所有数据进行计算,以计算后的坐标替换初始坐标,然后机器进入正常工作状态。否则进入步骤6。
[0078]
6、当
△
x和
△
y其中至少一个大于等于第一预设误差阈值且均小于第二预设误差阈值时,以(
△
x,
△
y)为天线升高前后的差值,将步骤5中已经替换的地图数据每个坐标点位的坐标分别加上(
△
x,
△
y),并重新将地图数据保存,机器进入正常工作状态。否则进入步骤7。
[0079]
7、当
△
x和
△
y其中至少一个大于等于第二预设误差阈值时,智能割草机获取数据
△
x’=(x2-x0),
△
y’=(y2-y0),以(
△
x’,
△
y’)为天线升高前后的差值,将初始的地图数据每个坐标点位的初始坐标分别加上(
△
x’,
△
y’),并重新将地图数据保存,机器进入正常工作状态。
[0080]
在机器调高过程中,当机器越靠近基站,在rtk单元高度变化前后的坐标差值变化越大,机器距离rtk单元越远,其坐标差值越小,为了减小计算量,在进行地图数据更新时,地图中距离基站位置距离超过设定阈值的坐标点不进行坐标计算的步骤。但是仍要进行与(
△
x,
△
y)或者(
△
x’,
△
y’)的数据计算。
[0081]
定位天线和无线通信天线的调高模块可以分为一体式调高模块,即调整其中一个天线的高度时,另一个天线高度也随之变化。也可以选择使用分体式调高方式,即定位天线和通信天线高度调整根据各自的参数进行,互不影响。
[0082]
正常情况下,由于定位天线高度和通信天线高度在同一使用环境下,提高天线高度和增强信号接收质量都是正相关的,所以天线同时调高的方法可以作为一种选择。
[0083]
区别在于,单独调整无线通信高度时,对智能割草机的定位系统没有影响。而选择同时调整高度的方案时,因为调整无线通信天线高度时,定位天线高度也随之变化,卫星天线高度的变化及升降装置带来的位置偏差等因素影响,所以需要在天线升降操作中增加定位位置精度补偿(即需要用到上述的机器定位精度补偿算法)。
[0084]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该
了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1