一种空间光通信精瞄单元的传感器数据融合方法及系统与流程
1.本发明涉及空间激光通信领域,具体涉及一种空间光通信精瞄单元的传感器数据融合方法及系统。
背景技术:
2.空间激光通信是以激光为载波,建立星间链路,实现微波通信无法达到的高速率、低功耗信息传输。在激光通信过程中,由于存在距离远、束散角小、卫星震动、姿态传感器精度低等因素,导致激光通信终端无法直接通过角度解析出对方激光通信终端精确位置,因此需使用捕获、瞄准、跟踪(acquisition,tracking and pointing,atp)系统以及精瞄准系统以保证星间链路的快速建立和稳定保持。
3.在典型的激光通信终端中,一般都采用上述复合轴方法对激光终端进行控制。其中粗瞄准机构完成低带宽的大范围瞄准,精瞄机构实现对光束小范围高精度的控制,在激光终端中常常使用压电陶瓷驱动反射镜进行精瞄控制。精瞄准机构的偏转角度范围一般为毫弧度级,瞄准精度在微弧度级,其控制精度主要取决于传感器的精度,而控制的精度将直接影响高速激光通信的质量及稳定性。
4.精瞄准机构在激光链路建立之前只有压电陶瓷上贴附的电阻应变片式传感器(resistance strain gauge gensor,sgs)能反馈压电陶瓷偏转角度,采样精度约7微弧,建立激光链路之后光探测器可输出光斑脱靶量,由于压电陶瓷末端安装有反射镜,当压电陶瓷运动,光斑会随之移动,因此可由光斑脱靶量推算出压电陶瓷的偏转角度,精度约4微弧。一般而言,在精瞄准控制系统中光斑计算出的脱靶量作为目标值输入到系统,控制系统并没有把传感器的性能完全发挥出,损失一部分系统测量精度,而单独提升sgs的精度则需要更高精度的电路支持,对外界变量控制要求更为苛刻,成本也较为昂贵。
技术实现要素:
5.为了克服上述现有技术中存在的缺陷,本发明的目的是提供一种空间光通信精瞄单元的传感器数据融合方法及系统。
6.为了实现本发明的上述目的,本发明提供了一种空间光通信精瞄单元的传感器数据融合方法,将精瞄准主控单元的输入端与光电探测单元输出端相连,压电陶瓷偏摆镜与电阻应变片式传感器固连,所述电阻应变片式传感器输出端与精瞄准主控单元输入端相连;
7.该方法包括以下步骤:
8.所述精瞄准控制单元采集所述电阻应变片式传感器信号,并将其转换为压电陶瓷偏摆镜偏转角度一;
9.所述精瞄准控制单元接收所述光电探测发出的光斑脱靶量,并计算出对应的压电陶瓷偏摆镜偏转角度二;
10.基于所述压电陶瓷偏摆镜偏转角度一对电阻应变片式传感器信号进行卡尔曼滤
波处理,得到第一次卡尔曼滤波处理结果;基于压电陶瓷偏摆镜偏转角度二对第一次卡尔曼滤波处理结果进行卡尔曼滤波处理,得到第二次卡尔曼滤波处理结果,以该结果作为空间光通信精瞄单元的传感器数据融合结果输出。
11.该方法优化了精瞄准单元传感器数据采集策略,提高了精瞄准系统的反馈数据精度,保证了高速激光通信的稳定。
12.该空间光通信精瞄单元的传感器数据融合方法的优选方案:
13.第一次卡尔曼滤波对电阻应变片式传感器信号进行卡尔曼滤波处理时,将上一时刻数据融合时第二次卡尔曼滤波的输出结果带入卡尔曼方程,将实时的压电陶瓷偏摆镜偏转角度一带入测量值,输出第一次卡尔曼滤波处理结果;
14.第二次卡尔曼滤波,将当前时刻第一次卡尔曼滤波处理结果带入卡尔曼方程,将实时的压电陶瓷偏摆镜偏转角度二带入测量值,输出第二次卡尔曼滤波处理结果,以该结果作为当前空间光通信精瞄单元的传感器数据融合结果输出,并将该结果在下一时刻数据融合时带入卡尔曼方程进行下一时刻的第一次卡尔曼滤波。
15.该空间光通信精瞄单元的传感器数据融合方法的优选方案:
16.卡尔曼滤波时,采用以下公式:
17.其中指当前时刻k的预测值,指当前时刻k预测的误差协方差矩阵,kk指当前时刻k卡尔曼滤波增益,xk指当前时刻k滤波输出值,pk指当前时刻输出值的误差协方差矩阵,a为状态转移矩阵,b为控制矩阵,q为状态估计方差矩阵,h为观测矩阵;
18.第一次卡尔曼滤波时,将上一时刻数据融合时第二次卡尔曼滤波输出的x
k+1
、p
k+1
带入卡尔曼方程的x
k-1
、p
k-1
,将实时测得的压电陶瓷偏摆镜偏转角度一带入测量值zk,输出当前时刻第一次卡尔曼滤波后的值为xk和协方差pk;
19.第二次卡尔曼滤波时,将当前时刻第一次卡尔曼滤波处理结果输出的xk、pk带入卡尔曼方程中的x
k-1
、p
k-1
,将实时测得的压电陶瓷偏摆镜偏转角度二带入测量值矩阵记为z
k+1
,使用z
k+1
带入方程中的zk,输出当前时刻第二次卡尔曼滤波后的值的值x
k+1
和协方差矩阵p
k+1
。
20.本发明还提出了一种空间光通信精瞄单元的传感器数据融合系统,包括精瞄准主控单元、电阻应变片式传感器、光电探测单元和压电陶瓷偏摆镜,所述精瞄准主控单元的输入端与光电探测单元输出端相连,所述压电陶瓷偏摆镜与电阻应变片式传感器固连,所述电阻应变片式传感器输出端与精瞄准主控单元输入端相连;所述精瞄准主控单元实时采集电阻应变片式传感器上的信号并接收光电探测单元发出的光斑脱靶量,然后根据上述的空间光通信精瞄单元的传感器数据融合方法对空间光通信精瞄单元的传感器数据进行融合输出。
21.本发明的有益效果是:
22.1、本发明将光电探测器与电阻应变片式传感器数据融合,充分利用了整个激光通信系统的资源,大幅度提高精瞄准系统反馈数据的采样精度。
23.2、本发明所使用的传感器都是激光通信精瞄准系统中最基本的传感器,不增加额外的硬件成本,电阻应变片式传感器及其配套电路成本也较为适中,在使用较为简单的系统、较低成本的前提下,使用卡尔曼滤波算法提高了最终反馈数据的精度。
24.3、本发明采用两次卡尔曼滤波方案进行数据融合,相比扩展卡尔曼滤波方案,降低了运算复杂度。
25.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
26.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
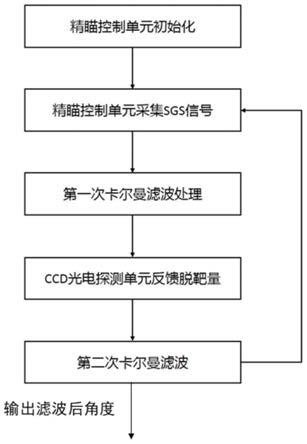
27.图1是本方法的流程示意图。
具体实施方式
28.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
29.在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
30.如图1所示,本发明提供了一种空间光通信精瞄单元的传感器数据融合方法的实施例,应用于空间激光通信终端精瞄准控制系统中,其硬件包括精瞄准主控单元、电阻应变片式传感器sgs、ccd光电探测单元和压电陶瓷偏摆镜,精瞄准主控单元的输入端与ccd光电探测单元输出端相连,压电陶瓷偏摆镜与电阻应变片式传感器sgs固连,所述电阻应变片式传感器sgs输出端与精瞄准主控单元输入端相连。
31.该方法包括以下步骤:
32.在稳定建立激光链路后,所述精瞄准控制单元采集所述电阻应变片式传感器sgs信号,并将其转换为压电陶瓷偏摆镜偏转角度一θ1;所述精瞄准控制单元接收所述光电探测发出的光斑脱靶量,并计算出对应的压电陶瓷偏摆镜偏转角度二θ2;
33.基于所述压电陶瓷偏摆镜偏转角度一对电阻应变片式传感器信号进行卡尔曼滤波处理,得到第一次卡尔曼滤波处理结果;基于压电陶瓷偏摆镜偏转角度二对第一次卡尔曼滤波处理结果进行卡尔曼滤波处理,得到第二次卡尔曼滤波处理结果,以该结果作为空间光通信精瞄单元的传感器数据融合结果输出。
34.该方法通过卡尔曼滤波算法将上述两种传感器融合后作为系统的反馈量,提高压电陶瓷的测量精度。
35.由于在空间激光通信终端精瞄准控制系统中需要实时反馈压电陶瓷偏转角度,因
此提出了本实施例的优选方案,具体如下:
36.在上述实施例的基础了,在第一次卡尔曼滤波对电阻应变片式传感器信号进行卡尔曼滤波处理时,将上一时刻数据融合时第二次卡尔曼滤波的输出结果带入卡尔曼方程,将实时的压电陶瓷偏摆镜偏转角度一带入测量值,输出第一次卡尔曼滤波处理结果。
37.第二次卡尔曼滤波,将当前时刻第一次卡尔曼滤波处理结果带入卡尔曼方程,将实时的压电陶瓷偏摆镜偏转角度二带入测量值,输出第二次卡尔曼滤波处理结果,以该结果作为当前空间光通信精瞄单元的传感器数据融合结果输出,并将该结果在下一时刻数据融合时带入卡尔曼方程进行下一时刻的第一次卡尔曼滤波。
38.在进行卡尔曼滤波时,采用以下公式:
39.其中指当前时刻k的预测值,指当前时刻k预测的误差协方差矩阵,kk指当前时刻k卡尔曼滤波增益,xk指当前时刻k滤波输出值,pk指当前时刻k输出值的误差协方差矩阵,a为状态转移矩阵,本方案中采用均加速度模型,则b为控制矩阵,本方案中采用均加速模型则δt表示当前采样时刻与上一采样时刻的时间间隔,r为测量协方差,i是单位矩阵,zk是压电陶瓷偏摆镜偏转角度测量值,ak是角加速度预估值,q为状态估计方差矩阵,h为观测矩阵,因只能观测到角度变量,因此h=[1 0 0]。
[0040]
第一次卡尔曼滤波时,将上一时刻数据融合时第二次卡尔曼滤波输出的x
k+1
、p
k+1
带入卡尔曼方程的x
k-1
、p
k-1
,将实时的压电陶瓷偏摆镜偏转角度一带入测量值zk,这里涉及到的测量协方差可预先设置,本实施例中优选但不限于为r=7e-6,输出当前时刻第一次卡尔曼滤波后的值为xk和协方差pk。值得注意的是:初始化卡尔曼滤波时,将单位向量x0=[1,1,1]带入x
k-1
,单位矩阵带入p
k-1
。
[0041]
第二次卡尔曼滤波时,将当前时刻第一次卡尔曼滤波处理结果输出的xk、pk带入卡尔曼方程中的x
k-1
、p
k-1
,将实时的压电陶瓷偏摆镜偏转角度二带入测量值矩阵记为z
k+1
带入方程中的zk,这里涉及到的测量协方差可预先设置,本实施例中优选但不限于为r=4e-6,
输出当前时刻第二次卡尔曼滤波后的值x
k+1
和协方差矩阵p
k+1
,以x
k+1
作为压电陶瓷偏转角度;并将当前时刻第二次卡尔曼滤波后的值的值x
k+1
和协方差矩阵p
k+1
在下一时刻数据融合时带入卡尔曼方程进行下一时刻的第一次卡尔曼滤波。
[0042]
本发明还提出了一种空间光通信精瞄单元的传感器数据融合系统的实施例,其包括精瞄准主控单元、电阻应变片式传感器、ccd光电探测单元和压电陶瓷偏摆镜,所述精瞄准主控单元的输入端与ccd光电探测单元输出端相连,所述压电陶瓷偏摆镜与电阻应变片式传感器固连,所述电阻应变片式传感器输出端与精瞄准主控单元输入端相连;所述精瞄准主控单元实时采集电阻应变片式传感器上的信号并接收ccd光电探测单元发出的光斑脱靶量,然后根据上述的空间光通信精瞄单元的传感器数据融合方法对空间光通信精瞄单元的传感器数据进行融合输出,反馈到压电陶瓷偏转角度。
[0043]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0044]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1