一种NOMA增强的无人机辅助建模分析方法
一种noma增强的无人机辅助建模分析方法
技术领域
1.本发明属于通信技术领域,涉及一种noma增强的无人机辅助建模分析方法。
背景技术:
2.随着无线移动通信技术的发展,无人机通信场景得到了广泛的研究。无人机由于其结构小、易部署、灵活的优势,在5g/6g网络标准化进程中,可以作为空中基站来提供无线服务,使得无人机可以应用于灾后通信重建,热点区域任务卸载等场景,有望成为未来无线网络的一部分。
3.目前,采用随机几何学的相关知识是分析无人机辅助蜂窝网络时的有力工具,从数学的角度来分析无人机辅助蜂窝网络的性能,而避免了蒙特卡洛仿真这种较高的计算复杂度,对于分析无人机辅助蜂窝网络性能发挥着重要的作用。而noma技术在提高网络的频谱效率和改善蜂窝网络中的用户接入等方面有着独特的优势,将noma技术应用于无人机辅助蜂窝网络是一种很好的选择。在现有的无人机辅助蜂窝网络建模中,还存在一些不足,如公开号为cn112672376a的专利申请中,发明人利用随机几何的相关知识来建模无人机辅助蜂窝网络,但对于目前5g技术如noma/mimo等没有应用在该场景;而在公开号为cn111615200a的专利申请中,发明人从资源分配方面考虑了noma增强的无人机辅助蜂窝网络,但缺少对该网络场景的理论分析,也没有得到相关的性能指标。
4.因此,亟需一种能够准确分析无人机辅助蜂窝网络的建模方法。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种noma增强的无人机辅助建模分析方法,采用随机几何学的相关知识,同时结合noma/mimo的技术特点来建模并精准的分析无人机辅助蜂窝网络。
6.为达到上述目的,本发明提供如下技术方案:
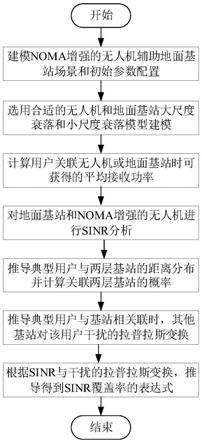
7.一种noma增强的无人机辅助建模分析方法,该方法包括以下步骤:
8.s1:建模noma增强的无人机辅助地面基站场景,无人机和地面基站的分布服从密度λu和λg齐次泊松点过程,功率pu和pg,无人机高度h,地面基站配备m个天线,通过相同的资源块向n个用户发送信号;
9.s2:选用合适的无人机和地面基站的大尺度衰落和小尺度衰落模型进行建模;
10.s3:采用最强平均接收功率关联准则,计算用户关联无人机或地面基站时可获得的平均接收功率p
r,u
,p
r,g
;
11.s4:考虑一个典型用户,当典型用户关联无人机或地面基站时,分析典型用户的sinr;
12.s5:推导典型用户与两层基站的距离分布并计算关联两层基站的概率ag;
13.s6:推导典型用户与无人机或地面基站相关联时,其他基站对该用户干扰的拉普
拉斯变换
14.s7:根据步骤s4中分析的sinr与步骤s6中干扰的拉普拉斯变换,推导典型用户与无人机或地面基站相关联时sinr覆盖率的表达式
15.进一步,步骤s2具体包括包括:
16.无人机(uav)与用户(ue)之间空对地的视距(los)链路的概率近似为:
[0017][0018]
其中为其仰角,b,c是取决于环境的特定常数,r为uav与典型用户之间的水平距离。从公式可以看出,uav高度越高,los概率越高。uav与典型用户之间nlos链路的概率是
[0019]
大尺度衰落,采用了结合了视距和非视距(nlos)的传输路径损耗模型,uav与用户之间链路的传输路径损耗可以表示为:
[0020][0021]
其中s∈{los,nlos},l和n表示los和nlos,表示uav与ue之间los和nlos链路的路径损耗指数,η
l
,ηn是附加损耗参数。因此,对于uav与ue之间的小尺度衰落可以表示为h
l
,hn,其服从参数为γ(n
l
,1/n
l
)和γ(nn,1/nn)的伽马分布,n
l
,nn为nakagami衰落参数。
[0022]
在地面基站(gbs)层中,由于在sub-6ghz频段传输信号,gbs与ue之间的大尺度衰落可以表示为ηg,αg分别表示附加损耗参数和路径损耗指数。由于gbs配备有多天线,连接在gbs上的用户将获得大规模天线增益g0=m-n+1。典型用户与服务基站之间的小尺度衰落可以表示为h
g,0
,服从参数为γ(m-n+1,1)的伽马分布,典型用户与服务基站之间的小尺度衰落可以表示为h
g,i
,服从参数为γ(n,1)的伽马分布。
[0023]
进一步,步骤s3具体包括:
[0024]
ue可以通过采用支持noma的uav层或采用mimo的gbs层进行通信,以提供最佳覆盖。我们采用最强平均接收功率关联准则,即假定典型用户与每层中提供最强长期平均接收功率的基站相关联。
[0025]
1)由于随机模型的随机空间拓扑,ue的位置也不是预先确定的。因此ue会选择距离最近的uav进行通信,且uav与ue之间的链路存在los和nlos两种状态,因此,用户连接到uav时其接收功率为
[0026][0027]
其中,pu为uav的传输功率,ri为uav层中离典型ue最近的基站的距离,an为ue的功率收集因子,表示路径损耗,i表示第i个基站,φu表示uav服从齐次泊松点过程。
[0028]
2)采用mimo的gbs层平均接收功率。由于gbs配备了大规模天线阵列,因此连接的用户可获得天线增益g0=m-n+1,用户的接收功率可以表示为
[0029]
[0030]
其中,pg为gbs的传输功率,ri为gbs层中离典型ue最近的基站,l
i,g
表示路径损耗,φg表示表示gbs服从齐次泊松点过程。
[0031]
进一步,步骤s4具体包括:
[0032]
1)支持mimo的gbs层传输。
[0033]
当典型ue在距离为r
g,0
处连接gbs时,其sinr可以表示为
[0034][0035]
其中,表示地面基站层的干扰,表示无人机层的干扰,ε∈{los,nlos},g0、h
u,i
、分别表示无人机层中第i个基站和典型用户之间链路的有效天线增益、小尺度衰落增益和路径损耗,h
g,i
、分别表示地面基站层中第i个基站和典型用户之间链路的小尺度衰落增益和路径损耗,q表示与典型用户相关联的基站,表示uav中为los/nlos基站服从泊松点过程,是gbs层热噪声功率。
[0036]
2)支持noma的uav层传输。
[0037]
在uav层中,在不损失通用性的情况下,我们认为每个uav在前一轮用户关联过程中与一个用户关联。为简单起见,假设关联ue和连接的uav之间的距离是相同的,可以是任意值,表示为rf。与小尺度衰落相比,路径损耗为主要部分,因此我们在近用户侧应用串行干扰消除(sic)操作。然而,并不预先确定典型用户是近用户还是远用户,我们有以下近用户情形和远用户情形。
[0038]
①
近用户情形。当典型用户为近用户时,即典型用户到bs的距离小于关联用户到bs的距离(r
u,0
<rf),因此,典型用户会先解码固定用户的信息,对应的sinr表达式为
[0039][0040]
其中,am,an分别表示远用户和近用户的功率分配系数,满足am>an和am+an=1,是uav层热噪声功率,表示无人机层的干扰,表示地面基站层的干扰。
[0041]
如果成功解码固定用户的信息,固定用户的干扰就可以被消除,典型用户就可以解码自己的信息,对应的sinr表达式为
[0042][0043]
对于由相同uav服务的固定用户(即远用户),通过noma技术可以直接解码自己的信息,而典型用户的信息则作为干扰,因此,固定用户的sinr可以表示为
[0044][0045]
②
远用户情形。当典型用户为远用户时,即典型用户到bs的距离大于关联用户到
bs的距离(r
u,0
>rf),对于固定用户将先解码典型用户的信息,对应的sinr可以表示为
[0046][0047]
如果成功解码典型用户的信息,典型用户的干扰就可以被消除,固定用户就可以解码自己的信息,对应的sinr表达式为
[0048][0049]
对于由相同gbs服务的典型用户(即远用户),通过noma技术可以直接解码自己的信息,而固定用户的信息则作为干扰,因此,固定用户的sinr可以表示为
[0050][0051]
进一步,步骤s5具体包括:
[0052]
典型用户周围至少一个los/nlos uav的概率为:
[0053][0054]
其中,λu为uav层的密度。
[0055]
典型用户周围至少一个los/nlos uav,其距离的ccdf和pdf可以表示为:
[0056]
ccdf:
[0057]
pdf:
[0058]
同理,典型用户周围至少一个gbs,其距离的ccdf和pdf可以表示为:
[0059]
ccdf:
[0060]
pdf:
[0061]
其中,λg为地面基站的密度。
[0062]
定义
[0063][0064]
典型用户与los/nlos uav关联的概率为
[0065][0066]
其中,s
′
、s∈{los,nlos},s
′
≠s,为式(13),为式(13),为式(15),为式(15),为式(15),为式(14)。
[0067]
典型用户与gbs关联的概率为
[0068][0069]
其中,为式(13),为式(13),为式(13),为式(13),为式(16)。
[0070]
典型用户关联los/nlos uav时,其距离分布的pdf分布如下
[0071][0072]
典型用户关联gbs时,其距离分布的pdf分布如下
[0073][0074]
进一步,步骤s6具体包括:
[0075]
1)当典型用户与los/nlos uav相关联时,uav层干扰的拉普拉斯变换表示为
[0076][0077]
其中s,ε∈{los,nlos},的表达式为
[0078][0079]
其中,上式的推导主要通过泊松点过程的概率生成函数和伽马随机变量的矩母函数得到,μ表示一个自变量,会对应于下文的μg,
[0080]
2)当典型用户与gbs相关联时,uav层干扰的拉普拉斯变换表示为
[0081][0082]
的表达式为
[0083][0084]
其中,
[0085]
3)当典型用户与los/nlos uav相关联时,gbs层干扰的拉普拉斯变换表示为
[0086]
[0087]
其中,
[0088]
4)当典型用户与gbs相关联时,gbs层干扰的拉普拉斯变换表示为
[0089][0090]
其中,ωg(r)=r。
[0091]
进一步,步骤s7包括:
[0092]
sinr覆盖率可以定义为一个典型用户在一定的sinr阈值t下可以成功传输信号的概率,可以表示为
[0093][0094]
1)典型用户关联gbs时,sinr覆盖率可以表示为
[0095][0096]
其中,上式主要通过alzers’s引理推导得到。
[0097]
2)当典型用户关联los/nlos uav层时,根据noma解码策略,考虑到典型用户为近用户和远用户这两种情形,分开对这两种情形的典型用户进行sinr覆盖率分析。
[0098]
①
近用户情形,即r
u,0
<rf,典型用户成功解码自己的信息步骤如下:
[0099]
典型用户先解码由相同uav服务的固定用户的信息。
[0100]
经过sic过程,典型用户解码自己的信息。
[0101]
因此,在近用户的情形下,sinr覆盖率可以表示为
[0102][0103]
其中,tf,t
t
分别表示固定用户和典型用户的sinr阈值。
[0104]
典型用户为近用户,满足a
m-antf≥0条件时,sinr覆盖率可以表示为:
[0105][0106]
其中当不满足a
m-antf≥0的条件时,
[0107]
②
远用户情形,即r
u,0
>rf,典型用户可以通过将固定用户的信息视为噪声来成功解码其自己的信息。因此,对于远用户情形,满足a
m-ant
t
≥0条件时,sinr覆盖率可以表示为:
[0108]
[0109]
其中,当不满足a
m-ant
t
≥0的条件时,
[0110]
当典型用户关联gbs层时,典型用户的sinr覆盖率可以表示为
[0111][0112]
本发明的有益效果在于:本发明可以从数学的方面来获得noma增强的无人机辅助蜂窝网络的性能,对noma增强的无人机辅助蜂窝网络的研究提供一个理论上的参考,对实际无人机辅助蜂窝网络的设计提供指导。
[0113]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0114]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0115]
图1为本发明noma增强的无人机辅助建模分析方法的流程图。
[0116]
图2为基于本发明方法的一个具体实例示意图。
具体实施方式
[0117]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0118]
请参阅图1~图2,本发明的noma增强的无人机辅助建模分析方法,具体包括以下步骤:
[0119]
步骤一:开始;
[0120]
步骤二:建模noma增强的无人机辅助地面基站场景,如图2所示,无人机和地面基站的分布服从密度λu和λg齐次泊松点过程,功率pu和pg,无人机高度h,地面基站配备m个天线,通过相同的资源块向n个用户发送信号。
[0121]
步骤三:选用合适的无人机和地面基站的大尺度衰落和小尺度衰落模型进行建模。无人机(uav)与用户(ue)之间空对地的视距(los)链路的概率近似为:
[0122][0123]
其中,为其仰角,b,c是取决于环境的特定常数,r为uav与典型
用户之间的水平距离。从公式可以看出,uav高度越高,los概率越高。uav与典型用户之间nlos链路的概率是
[0124]
大尺度衰落,采用了结合了视距和非视距(nlos)的传输路径损耗模型,uav与用户之间链路的传输路径损耗可以表示为:
[0125][0126]
其中,s∈{los,nlos},l和n表示los和nlos,表示uav与ue之间los和nlos链路的路径损耗指数,η
l
,ηn是附加损耗参数。因此,对于uav与ue之间的小尺度衰落可以表示为h
l
,hn,其服从参数为γ(n
l
,1/n
l
)和γ(nn,1/nn)的伽马分布,n
l
,nn为nakagami衰落参数。
[0127]
在地面基站(gbs)层中,由于在sub-6ghz频段传输信号,gbs与ue之间的大尺度衰落可以表示为ηg,αg分别表示附加损耗参数和路径损耗指数。由于gbs配备有多天线,连接在gbs上的用户将获得大规模天线增益g0=m-n+1。典型用户与服务基站之间的小尺度衰落可以表示为h
g,0
,服从参数为γ(m-n+1,1)的伽马分布,典型用户与服务基站之间的小尺度衰落可以表示为h
g,i
,服从参数为γ(n,1)的伽马分布。
[0128]
步骤四:ue可以通过采用支持noma的uav层或采用mimo的gbs层进行通信,以提供最佳覆盖。我们采用最强平均接收功率关联准则,即假定典型用户与每层中提供最强长期平均接收功率的基站相关联。
[0129]
由于随机模型的随机空间拓扑,ue的位置也不是预先确定的。因此ue会选择距离最近的uav进行通信,且uav与ue之间的链路存在los和nlos两种状态,因此,用户连接到uav时其接收功率为
[0130][0131]
其中,pu为uav的传输功率,ri为uav层中离典型ue最近的基站的距离,an为ue的功率收集因子,表示路径损耗,i表示第i个基站,φu表示uav服从齐次泊松点过程。
[0132]
采用mimo的gbs层平均接收功率。由于gbs配备了大规模天线阵列,因此连接的用户可获得天线增益g0=m-n+1,用户的接收功率可以表示为
[0133][0134]
其中,pg为gbs的传输功率,为gbs层中离典型ue最近的基站,l
i,g
表示路径损耗,φg表示表示gbs服从齐次泊松点过程。
[0135]
步骤五:考虑一个典型用户,当典型用户关联无人机或地面基站时,分析典型用户的sinr。
[0136]
支持mimo的gbs层传输。当典型ue在距离为r
g,0
处连接gbs时,其sinr可以表示为
[0137][0138]
其中,表示地面基站层的干扰,表示无
人机层的干扰,ε∈{los,nlos},g0、h
u,i
、分别表示无人机层中第i个基站和典型用户之间链路的有效天线增益、小尺度衰落增益和路径损耗,h
g,i
、分别表示地面基站层中第i个基站和典型用户之间链路的小尺度衰落增益和路径损耗,q表示与典型用户相关联的基站,表示uav中为los/nlos基站服从泊松点过程,是gbs层热噪声功率。
[0139]
支持noma的uav层传输。在uav层中,在不损失通用性的情况下,我们认为每个uav在前一轮用户关联过程中与一个用户关联。为简单起见,假设关联ue和连接的uav之间的距离是相同的,可以是任意值,表示为rf。与小尺度衰落相比,路径损耗为主要部分,因此我们在近用户侧应用串行干扰消除(sic)操作。然而,并不预先确定典型用户是近用户还是远用户,我们有以下近用户情形和远用户情形。
[0140]
近用户情形。当典型用户为近用户时,即典型用户到bs的距离小于关联用户到bs的距离(r
u,0
<rf),因此,典型用户会先解码固定用户的信息,对应的sinr表达式为
[0141][0142]
其中,am,an分别表示远用户和近用户的功率分配系数,满足am>an和am+an=1。表示uav层的干扰,表示gbs层的干扰。
[0143]
如果成功解码固定用户的信息,固定用户的干扰就可以被消除,典型用户就可以解码自己的信息,对应的sinr表达式为
[0144][0145]
对于由相同uav服务的固定用户(即远用户),通过noma技术可以直接解码自己的信息,而典型用户的信息则作为干扰,因此,固定用户的sinr可以表示为
[0146][0147]
远用户情形。当典型用户为远用户时,即典型用户到bs的距离大于关联用户到bs的距离(r
u,0
>rf),对于固定用户将先解码典型用户的信息,对应的sinr可以表示为
[0148][0149]
如果成功解码典型用户的信息,典型用户的干扰就可以被消除,固定用户就可以解码自己的信息,对应的sinr表达式为
[0150][0151]
对于由相同gbs服务的典型用户(即远用户),通过noma技术可以直接解码自己的信息,而固定用户的信息则作为干扰,因此,固定用户的sinr可以表示为
[0152][0153]
步骤六:推导典型用户与两层基站的距离分布并计算关联两层基站的概率ag。
[0154]
典型用户周围至少一个los/nlos uav的概率为:
[0155][0156]
其中,λu为uav层的密度。
[0157]
典型用户周围至少一个los/nlos uav,其距离的ccdf和pdf可以表示为:
[0158]
ccdf:
[0159]
pdf:
[0160]
同理,典型用户周围至少一个gbs,其距离的ccdf和pdf可以表示为:
[0161]
ccdf:
[0162]
pdf:其中,λg为地面基站的密度。
[0163]
定义
[0164][0165]
典型用户与los/nlos uav关联的概率为
[0166][0167]
其中,s
′
、s∈{los,nlos},s
′
≠s,为式(13),为式(13),为式(15),为式(15),为式(15),为式(14)。
[0168]
典型用户与gbs关联的概率为
[0169][0170]
其中,为式(13),为式(13),为式(13),为式(13),为式(16)。
[0171]
典型用户关联los/nlos uav时,其距离分布的pdf分布如下
[0172][0173]
典型用户关联gbs时,其距离分布的pdf分布如下
[0174][0175]
步骤七:推导典型用户与无人机或地面基站相关联时,其他基站对该用户干扰的拉普拉斯变换
[0176]
当典型用户与los/nlos uav相关联时,uav层干扰的拉普拉斯变换表示为
[0177][0178]
其中,s,ε∈{los,nlos},的表达式为
[0179][0180]
其中,上式的推导主要通过泊松点过程的概率生成函数和伽马随机变量的矩母函数得到,μ表示一个自变量,会对应于下文的μg,
[0181]
当典型用户与gbs相关联时,uav层干扰的拉普拉斯变换表示为
[0182][0183]
的表达式为
[0184][0185]
其中,
[0186]
当典型用户与los/nlos uav相关联时,gbs层干扰的拉普拉斯变换表示为
[0187][0188]
其中,
[0189]
当典型用户与gbs相关联时,gbs层干扰的拉普拉斯变换表示为
[0190][0191]
其中,ωg(r)=r。
[0192]
步骤八:根据步骤五中分析的sinr与步骤七中干扰的拉普拉斯变换,推导典型用户与无人机或地面基站相关联时sinr覆盖率的表达式。
[0193]
sinr覆盖率可以定义为一个典型用户在一定的sinr阈值下可以成功传输信号的概率,可以表示为
[0194][0195]
典型用户关联gbs时,sinr覆盖率可以表示为
[0196][0197]
其中,上式主要通过alzers’s引理推导得到。
[0198]
当典型用户关联los/nlos uav层时,根据noma解码策略,考虑到典型用户为近用户和远用户这两种情形,分开对这两种情形的典型用户进行sinr覆盖率分析。
[0199]
近用户情形,即r
u,0
<rf,典型用户成功解码自己的信息步骤如下:
[0200]
典型用户先解码由相同uav服务的固定用户的信息。
[0201]
经过sic过程,典型用户解码自己的信息。
[0202]
因此,在近用户的情形下,sinr覆盖率可以表示为
[0203][0204]
其中,tf,t
t
分别表示固定用户和典型用户的sinr阈值。
[0205]
典型用户为近用户,满足a
m-antf≥0条件时,sinr覆盖率可以表示为:
[0206][0207]
其中,当不满足a
m-antf≥0的条件时,
[0208]
远用户情形,即r
u,0
>rf,典型用户可以通过将固定用户的信息视为噪声来成功解码其自己的信息。因此,对于远用户情形,满足a
m-ant
t
≥0条件时,sinr覆盖率可以表示为:
[0209][0210]
其中,当不满足a
m-ant
t
≥0的条件时,
[0211]
当典型用户关联gbs层时,典型用户的sinr覆盖率可以表示为
[0212][0213]
步骤九:结束。
[0214]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较
佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1