控制电路和用于根据传感器驱动致动器的方法与流程
1.本发明涉及控制电路和用于根据传感器驱动致动器的方法,更具体地,涉及能够与传感器通信以控制致动器的电路和根据来自传感器的信号驱动致动器的方法。
背景技术:
2.许多电子设备具有集成在其中的成像系统,并且在一些情况下,可转动和/或旋转电子设备以用于所期望的图像捕获的目的。在许多情况下,成像系统可由光学成像稳定(ois)系统控制。特别地,ois系统可操作以稳定成像系统的各种部件诸如透镜,以及校正由外部干扰引起的电子设备的非随意移动,例如由抖动的手(手颤)引起的移动。然而,成像系统的各种部件诸如传感器、致动器等可彼此分开一定距离,这可能引起在各种部件之间的通信延迟。因此,在由成像系统检测到的加速度信号与施加到透镜的加速度信号之间可能存在相当大的差异,这可能影响光学图像稳定系统和/或透镜的位置。另外,可将偏移误差和/或偏置引入到该系统的各种部件中,这可进一步影响光学图像稳定系统和/或透镜的位置。因此,给定与相应目标位置和驱动信号相关联的特定位置指令(代码),将透镜移动到目标位置所需的驱动信号的量值可能不同于由位置指令值(代码)指定的量值。
技术实现要素:
3.本发明涉及集成在电子设备内的用于光学图像稳定的装置。
4.被本发明解决的技术问题是ois系统可操作以稳定成像系统的各种部件诸如透镜,以及校正由外部干扰引起的电子设备的非随意移动,例如由抖动的手(手颤)引起的移动。然而,成像系统的各种部件诸如传感器、致动器等可彼此分开一定距离,这可能引起在各种部件之间的通信延迟。因此,在由成像系统检测到的加速度信号与施加到透镜的加速度信号之间可能存在相当大的差异,这可能影响光学图像稳定系统和/或透镜的位置。另外,可将偏移误差和/或偏置引入到该系统的各种部件中,这可进一步影响光学图像稳定系统和/或透镜的位置。因此,给定与相应目标位置和驱动信号相关联的特定位置指令(代码),将透镜移动到目标位置所需的驱动信号的量值可能不同于由位置指令值(代码)指定的量值。
5.根据第一方面,适于与传感器通信并且能够控制致动器的控制电路包括:输入端子,该输入端子被配置为接收输入信号,其中输入信号包括x分量、y分量和z分量;第一电路,该第一电路连接到输入端子并且被配置为:接收y分量并且根据该y分量生成第一校正信号;接收z分量并且根据该z分量生成第二校正信号和第三校正信号;以及根据第一校正信号、第二校正信号和第三校正信号生成第一驱动信号;以及;第二电路,该第二电路连接到输入端子并且被配置为:接收x分量并且根据该x分量生成第四校正信号;接收z分量并且根据该z分量生成第五校正信号和第六校正信号;以及根据第四校正信号、第五校正信号和第六校正信号生成第二驱动信号。
6.在一个实施方案中,第一电路包括:第一子电路,该第一子电路被配置为:计算y分
量的平方;以及根据y分量的平方和第一校正增益生成第一校正信号;第二子电路,该第二子电路被配置为:计算z分量的平方;以及计算z分量的导数;以及进行以下操作:根据z分量的平方和第二校正增益生成第二校正信号;以及根据z分量的导数和第三校正增益生成第三校正信号;以及第三子电路,该第三子电路连接到第一子电路和第二子电路并且被配置为:接收第一校正信号、第二校正信号和第三校正信号;计算第一校正信号、第二校正信号和第三校正信号的第一和;以及根据第一和生成第一驱动信号。
7.在一个实施方案中,第二电路包括:第四子电路,该第四子电路被配置为:计算x分量的平方;以及根据x分量的平方和第四校正增益生成第四校正信号;第五子电路,该第五子电路被配置为:根据z分量的平方和第五校正增益生成第五校正信号;以及根据z分量的导数和第六校正增益生成第六校正信号;以及第六子电路,该第六子电路连接到第四子电路和第五子电路并且被配置为:接收第四校正信号、第五校正信号和第六校正信号;计算第四校正信号、第五校正信号和第六校正信号的第二和;以及根据第二和生成第二驱动信号。
8.在一个实施方案中,第一驱动信号等于第一和,并且其中第二驱动信号等于第二和。
9.在一个实施方案中,每个校正增益是预先确定的,并且其中:第一校正增益根据在传感器与致动器之间的第一距离确定,其中第一距离沿x轴方向;第二校正增益根据在传感器与致动器之间的第二距离确定,其中第二距离沿x轴方向;第三校正增益根据在传感器与致动器之间的第三距离确定,其中第三距离沿y轴方向;第四校正增益根据在传感器与致动器之间的第四距离确定,其中第四距离沿y轴方向;第五校正增益根据在传感器与致动器之间的第五距离确定,其中第五距离沿y轴方向;并且第六校正增益根据在传感器与致动器之间的第六距离确定,其中第六距离沿x轴方向。
10.在一个实施方案中,第一校正增益与第一距离成比例,其中第一距离根据传感器相对于致动器的第一相对位置确定;第二校正增益与第二距离成比例,其中第二距离根据传感器相对于致动器的第二相对位置确定;第三校正增益与第三距离成比例,其中第三距离根据传感器相对于致动器的第三相对位置确定;第四校正增益与第四距离成比例,其中第四距离根据传感器相对于致动器的第四相对位置确定;第五校正增益与第五距离成比例,其中第五距离根据传感器相对于致动器的第五相对位置确定;并且第六校正增益与第六距离成比例,其中第六距离根据传感器相对于致动器的第六相对位置确定。
11.根据第二方面,用于根据传感器驱动致动器的方法包括:从传感器接收包括x分量、y分量和z分量的输入信号;进行以下操作:根据y分量生成第一校正信号;根据z分量生成第二校正信号和第三校正信号;根据x分量生成第四校正信号;以及根据z分量生成第五校正信号和第六校正信号;以及进行以下操作:根据第一校正信号、第二校正信号和第三校正信号生成第一驱动信号;以及根据第四校正信号、第五校正信号和第六校正信号生成第二驱动信号。
12.在一个实施方案中,生成第一校正信号包括:计算y分量的平方;以及将第一校正增益施加到y分量的平方;生成第二校正信号包括:计算z分量的平方;以及将第二校正增益施加到z分量的平方;生成第三校正信号包括:计算z分量的导数;以及将第三校正增益施加到z分量的导数;生成第四校正信号包括:计算x分量的平方;以及将第四校正增益施加到x分量的平方;生成第五校正信号包括:将第五校正增益施加到z分量的平方;并且生成第六
校正信号包括:将第六校正增益施加到z分量的导数。
13.在一个实施方案中,生成第一校正信号还包括将第七校正增益施加到y分量的平方;生成第二校正信号还包括将第八校正增益施加到z分量的平方;生成第三校正信号还包括将第九校正增益施加到z分量的导数;生成第四校正信号还包括将第十校正增益施加到x分量的平方;生成第五校正信号还包括将第十一校正增益施加到z分量的平方;并且生成第六校正信号还包括将第十二校正增益施加到z分量的导数。
14.在一个实施方案中,每个校正增益是预先确定的,并且其中:第一校正增益根据在传感器与致动器之间的第一距离确定,其中第一距离沿x轴方向;第二校正增益根据在传感器与致动器之间的第二距离确定,其中第二距离沿x轴方向;第三校正增益根据在传感器与致动器之间的第三距离确定,其中第三距离沿y轴方向;第四校正增益根据在传感器与致动器之间的第四距离确定,其中第四距离沿y轴方向;第五校正增益根据在传感器与致动器之间的第五距离确定,其中第五距离沿y轴方向;并且第六校正增益根据在传感器与致动器之间的第六距离确定,其中第六距离沿x轴方向。
15.由本发明实现的技术效果是提供响应于传感器和来自致动器的反馈信号的致动器控制电路,以基于在致动器与传感器之间的相对位置和由致动器控制电路生成的输出信号来校准施加到驱动信号的增益。
附图说明
16.当结合以下示例性附图考虑时,可参照具体实施方式更全面地了解本技术。在以下附图中,通篇以类似附图标记指代各附图中的类似元件和步骤。
17.图1是根据本发明技术的示例性实施方案的光学图像稳定系统的框图;
18.图2是根据本发明技术的示例性实施方案的开环致动器控制电路的框图;
19.图3是根据本发明技术的示例性实施方案的闭环致动器控制电路的框图;
20.图4是根据本发明技术的示例性实施方案的致动器控制电路的第一部分的框图;
21.图5是根据本发明技术的示例性实施方案的致动器控制电路的第二部分的框图;
22.图6是根据本发明技术的示例性实施方案的致动器控制电路的第三部分的框图;
23.图7是根据本发明技术的示例性实施方案的致动器控制电路的第四部分的框图;
24.图8是示出在施加到光学图像稳定系统的干扰信号与施加到光学图像稳定系统的一部分的所得的加速度信号之间的相位角差的曲线图;
25.图9代表性地示出了根据本发明技术的示例性实施方案的用于操作光学图像稳定系统的在第一取向和第二取向上的传感器和致动器;
26.图10代表性地示出了根据本发明技术的示例性实施方案的用于操作光学图像稳定系统的在第三取向上的传感器和致动器;
27.图11是根据本发明技术的示例性实施方案的用于校正沿致动器的x轴的y旋转向心力的流程图;
28.图12是根据本发明技术的示例性实施方案的用于校正沿致动器的x轴的z旋转向心力的流程图;
29.图13是根据本发明技术的示例性实施方案的用于校正沿致动器的y轴的x旋转向心力的流程图;
30.图14是根据本发明技术的示例性实施方案的用于校正沿致动器的y轴的z旋转向心力的流程图;并且
31.图15代表性地示出了根据本发明技术的实施方案的致动器。
具体实施方式
32.本技术可在功能块部件和各种加工步骤方面进行描述。此类功能块可通过被配置为执行指定功能并且实现各种结果的任何数量的部件来实现。例如,本发明技术可采用各种加速度滤波器、加速度传感器、致动器、致动器控制电路、增益电路、衰减器、计算电路、电路、线圈、控制器、电流源、驱动器、滤波器、陀螺仪滤波器、陀螺仪传感器、图像传感器、透镜、逻辑门、磁体、处理器、传感器、半导体器件(诸如晶体管、电容器等)、信号发生器、衬底和电压源,它们可进行多种功能。另外,本发明技术可集成在任何数量的电子系统(诸如成像系统、机动车、航空、“智能设备”、便携式设备、医疗、科学、监视和消费性电子产品)中,并且所描述的系统仅为本发明技术的示例性应用。
33.本发明技术可与可受向心力、切向力、重力和灵敏度补偿影响的任何位置传感器电路结合使用,所述位置传感器电路诸如用于马达控制的位置传感器和用于检测移动电话的取向的传感器。另外,本发明技术可采用任何数量的常规技术来捕获图像数据、转换数据信号、对数据信号进行滤波、生成驱动信号等。
34.根据本发明技术的各个方面的用于光学图像稳定的方法和装置可集成在任何合适的电子设备或系统(诸如成像系统、“智能设备”、可穿戴设备、消费电子设备等)内。根据各种实施方案,本发明技术可确定电子设备的一个或多个取向,生成一个或多个取向信号,并且将一个或多个适当的增益值施加到一个或多个取向信号以生成驱动信号。
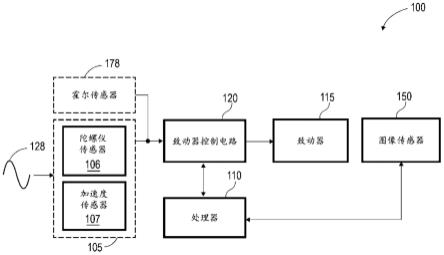
35.参考图1,示例性系统100可集成在包括图像传感器150的任何合适的电子设备(诸如移动电话、平板电脑等)中。在各种应用中,系统100可操作以稳定成像系统的各种部件诸如透镜142(例如,如图11-图15所示),以及校正移动电话的移动,例如由非随意移动诸如手颤或随意移动诸如电子设备的位置改变引起的移动。在本技术中,系统100可称为光学图像稳定(ois)系统。根据各种实施方案,系统100可包括传感器105、致动器115和致动器控制电路120。系统100还可包括处理器110。另外,系统100可被配置为开环系统(例如,如图2所示)或闭环系统(例如,如图3所示)。
36.传感器105可被配置为测量电子设备的取向、旋转、运动和/或角速度,并且生成对应信号。信号可以是模拟信号。特别地,传感器105可检测施加到系统100的干扰信号128,诸如振动等,并且响应于检测到干扰信号128而生成信号。传感器105可包括陀螺仪传感器106和加速度传感器107中的至少一者。可在x轴方向、y轴方向和/或z轴方向上向系统100施加干扰信号128。
37.传感器105可连接到致动器控制电路120,并且被配置为将该信号传输到致动器控制电路120。该信号可包括对应于设备的角速度的第一输入信号(即,速度信号s
vel
)和/或对应于设备的加速度的第二输入信号(即,加速度信号s
acc
)。速度信号s
vel
可包括第一x分量、第一y分量和第一z分量,并且加速度信号s
acc
可包括第二x分量和第二y分量。每个分量可对应于x-y-z参考坐标系的轴线,其中x轴方向和y轴方向可各自被定义为正交于z轴方向。
38.传感器105可包括被配置为检测由外部干扰产生的运动、旋转和/或角速度并且生
成对应电信号的任何合适的传感器系统或设备。传感器105可根据特定应用进行选择,并且可根据各种规范(诸如感测范围、输出类型、电源电流、操作温度等)进行选择。在一个实施方案中,传感器105可安装在电子设备上并且形成在与致动器控制电路120分开的衬底上。在另一个实施方案中,传感器105可形成在与致动器控制电路120相同的衬底上。衬底可以是任何合适的衬底,诸如印刷电路板(pcb)等。
39.传感器105可围绕系统100的旋转中心(即,参考点)旋转(例如,如图9-图10所示)。旋转中心可由参考坐标(x0,y0,z0)表示。传感器105可位于距旋转中心的一定距离处,其中该距离可由δds表示。因此,传感器105可位于坐标(xs,ys,z0)处,其中坐标(xs,ys,z0)相对于参考坐标(x0,y0,z0)定义。
40.致动器115可被配置为沿各个轴线(例如,x轴、y轴和/或z轴)移动透镜142,以改善图像质量。致动器115可包括能够响应于信号而移动和/或重新定位透镜142的任何合适的设备或系统。致动器115可校正由干扰信号128引起的透镜142的非随意移动,并且还可通过在与干扰信号128相反的方向上驱动透镜142来稳定成像,以防止图像模糊。例如,并且现在参考图15,致动器115可被配置为音圈马达(vcm),其包括磁体185和响应于从致动器控制电路120发送的驱动信号s
dr
的线圈152。致动器115可生成对应于驱动信号s
dr
的驱动力f
dr
,并且将驱动力f
dr
施加到透镜142,以沿x轴和/或y轴定位透镜142。透镜142可移动或以其他方式重新定位,以校正由干扰信号128引起的任何移位/偏差。致动器115在其可执行的移动量方面可受限制,不论是自限制还是因系统的设计而受限制。例如,透镜142可被包封在具有侧壁的外壳(未示出)中。这样,致动器115的最大移动范围可赋予透镜142的最大移动范围可受外壳的内部尺寸限制。
41.致动器115可围绕系统100的旋转中心(即,参考点)旋转(例如,如图9-图10所示)。致动器115可位于距旋转中心的一定距离处,其中该距离可由δda表示。因此,致动器115可位于坐标(xa,ya,z0)处,其中坐标(xa,ya,z0)相对于参考坐标(x0,y0,z0)定义。
42.透镜142可包括适用于将光聚焦在图像传感器150上的任何透镜或透镜系统。例如,在各种实施方案中,透镜142可包括单个透镜元件。另选地,透镜142可包括彼此相邻布置的多个透镜元件。可使用任何合适的材料形成透镜142,所述材料诸如为玻璃、石英玻璃、萤石、锗、陨石玻璃、聚碳酸酯、塑料、高折射率塑料等或它们的任何组合。
43.处理器110可被配置为执行系统100的各种处理操作,包括与校准驱动信号s
dr
相关联的处理操作。在各种实施方案中,处理器110可被配置为启用和/或禁用系统100中的各种部件。
44.处理器110可向致动器控制电路120发出时变命令以生成驱动信号s
dr
。处理器110可被进一步配置为确定驱动信号s
dr
的量值及其对应的驱动力f
dr
。在一些实施方案中,处理器110可在图像传感器150外部实施。
45.另外,处理器110可被进一步配置为生成各种位置指令值p
ref(x,y,z)
,并且可指示系统100根据位置指令值p
ref(x,y,z)
在x轴方向、y轴方向和/或z轴方向上定位透镜142。位置指令值p
ref(x,y,z)
可基于驱动信号s
dr
来生成,并且可例如指示透镜142的目标位置和/或当前位置。每个位置指令值p
ref(x,y,z)
可对应于透镜142的当前位置和/或目标位置的一个分量(x分量、y分量和/或z分量)。处理器110可包括任何合适的处理设备,诸如微处理器、应用处理器、微控制器、可编程逻辑器件等。
46.在各种实施方案中,并且现在参考图1-图3,致动器控制电路120可被配置为控制电力并且将电力供应给系统100内的各种设备。例如,致动器控制电路120可经由驱动信号s
dr
向致动器115供应电力。驱动信号s
dr
可控制致动器115中的电流和/或电压,这可控制致动器115的移动。因此,致动器115的移动可与驱动信号s
dr
的量值成比例。致动器控制电路120可包括能够向致动器115提供能量的任何合适的控制设备或系统。
47.在各种实施方案中,诸如在闭环系统中,致动器控制电路120可接收并响应于反馈信号,诸如来自第一霍尔传感器178a和/或第二霍尔传感器178b的霍尔传感器信号。每个霍尔传感器178a、178b可被配置为检测致动器115和/或透镜142的实际位置。致动器115和/或透镜142的位置可相对于参考x-y-z坐标系定义。
48.致动器控制电路120可被配置为经由第一轴线和第二轴线将驱动信号s
dr
传输到致动器115。例如,致动器控制电路120可经由第一驱动器电路181a将第一驱动信号s
dr_1
传输到致动器115并且经由第二驱动器电路181b将第二驱动信号s
dr_2
传输到致动器115。应当理解,驱动信号s
dr
可由第一驱动信号s
dr_1
和/或第二驱动信号s
dr_2
表示。
49.在各种实施方案中,致动器控制电路120可包括第一电路部分121和第二电路部分122,该第一电路部分和第二电路部分各自能够分别从陀螺仪传感器106和加速度传感器107接收第一输入信号诸如速度信号s
vel
和第二输入信号诸如加速度信号s
acc
。
50.在一个示例性实施方案中,第一电路部分121可包括第一向心力校正电路195a和第一z旋转校正电路200a。第二电路部分122可包括第二向心力校正电路195b和第二z旋转校正电路200b。
51.在各种实施方案中,并且现在参考图4,第一向心力校正电路195a可包括第一子电路(即,第一偏移校正电路160a)、第二子电路(即,第一相位校正电路165a)、第三子电路(即,第一计算电路170a)、第一增益电路175a和第二增益电路175b。
52.在各种实施方案中,并且现在参考图5,第一z旋转校正电路200a可包括第四子电路(即,第二偏移校正电路160b)、第五子电路(即,第二相位校正电路165b)、第六子电路(即,第二计算电路170b)、第三增益电路175c、第四增益电路175d、第七子电路(即,第三计算电路170c)、第五增益电路175e和第六增益电路175f。
53.在各种实施方案中,并且现在参考图6,第二向心力校正电路195b可包括第八子电路(即,第三偏移校正电路160c)、第九子电路(即,第三相位校正电路165c)、第十子电路(即,第四计算电路170d)、第七增益电路175g和第八增益电路175h。
54.在各种实施方案中,并且现在参考图7,第二z旋转校正电路200b可包括第十一子电路(即,第四偏移校正电路160d)、第十二子电路(即,第四相位校正电路165d)、第十三子电路(即,第五计算电路170e)、第九增益电路175i、第十增益电路175j、第十四子电路(即,第六计算电路170f)、第十一增益电路175k和第十二增益电路175l。
55.参考图4-图7,每个偏移校正电路160a、160b、160c、160d可被配置为接收速度信号s
vel
的x分量、y分量和z分量中的一者并且根据速度信号s
vel
的x分量、y分量和z分量中的一者产生偏移校正输出信号。每个偏移校正输出信号可基本上不含存在于从陀螺仪传感器106接收到的速度信号s
vel
的x分量、y分量和z分量中的一者中的任何偏移误差和/或偏置。
56.偏移误差和/或偏置可以是直流(dc)偏移误差和/或偏置。存在于速度信号s
vel
的x分量、y分量和z分量中的dc偏移误差和/或偏置可以是噪声信号,并且因此不希望将其加到
速度信号s
vel
。dc偏移误差和/或偏置的量值可取决于系统100中使用的陀螺仪传感器106的类型,并且可受某些因素影响,所述因素诸如陀螺仪传感器106的尺寸和/或陀螺仪传感器106在其中操作的环境的温度。
57.dc偏移误差和/或偏置的量值可使用任何合适的校准方法预先确定,诸如通过在陀螺仪传感器106在参考状态下操作时(即,其中陀螺仪传感器106不受干扰信号128作用)测量由陀螺仪传感器106检测到的信号的振幅。由于陀螺仪传感器106在参考状态期间不受干扰信号128作用,因此检测到的信号可被认为是噪声信号。
58.应当理解,可从陀螺仪传感器106取得大量噪声读数,使得可确定噪声信号的平均振幅以更准确地确定dc偏移误差和/或偏置的量值。
59.因此,每个偏移校正电路160a、160b、160c、160d可被配置为通过从从陀螺仪传感器106接收的x分量、y分量和z分量中的一者减去量值与噪声信号相等的信号来生成相应偏移校正输出信号。每个偏移校正电路160a、160b、160c、160d可将其相应偏移校正输出信号传输到另一个电路部件以进行附加的处理。
60.第一偏移校正电路160a可被配置为从陀螺仪传感器106接收速度信号s
vel
的y分量。第一偏移校正电路160a可被进一步配置为根据速度信号s
vel
的y分量生成第一偏移校正信号s
oc_1
。例如,第一偏移校正电路160a可从速度信号s
vel
的y分量减去dc偏移误差和/或偏置。第一偏移校正电路160a可被进一步配置为将第一偏移校正信号s
oc_1
传输到另一个电路部件诸如第一相位校正电路165a以进行附加的处理。第一偏移校正电路160a可包括被配置为接收速度信号s
vel
的y分量并且从y分量移除dc偏移误差和/或偏置的任何合适的计算电路。
61.第二偏移校正电路160b可被配置为从陀螺仪传感器106接收速度信号s
vel
的z分量。第二偏移校正电路160b可被进一步配置为根据速度信号s
vel
的z分量生成第二偏移校正信号s
oc_2
。例如,第二偏移校正电路160b可从速度信号s
vel
的z分量减去dc偏移误差和/或偏置。第二偏移校正电路160b可被进一步配置为将第二偏移校正信号s
oc_2
传输到另一个电路部件诸如第二相位校正电路165b以进行附加的处理。第二偏移校正电路160b可包括被配置为接收速度信号s
vel
的z分量并且从z分量移除dc偏移误差和/或偏置的任何合适的计算电路。
62.第三偏移校正电路160c可被配置为从陀螺仪传感器106接收速度信号s
vel
的x分量。第三偏移校正电路160c可被进一步配置为根据速度信号s
vel
的x分量生成第三偏移校正信号s
oc_3
。例如,第三偏移校正电路160c可从速度信号s
vel
的x分量减去dc偏移误差和/或偏置。第三偏移校正电路160c可被进一步配置为将第三偏移校正信号s
oc_3
传输到另一个电路部件诸如第三相位校正电路165c以进行附加的处理。第三偏移校正电路160c可包括被配置为接收速度信号s
vel
的x分量并且从分量移除dc偏移误差和/或偏置的任何合适的计算电路。
63.第四偏移校正电路160d可被配置为从陀螺仪传感器106接收速度信号s
vel
的z分量。第四偏移校正电路160d可被进一步配置为根据速度信号s
vel
的z分量生成第四偏移校正信号s
oc_4
。例如,第四偏移校正电路160d可从速度信号s
vel
的z分量减去dc偏移误差和/或偏置。第四偏移校正电路160d可被进一步配置为将第四偏移校正信号s
oc_4
传输到另一个电路部件诸如第四相位校正电路165d以进行附加的处理。第四偏移校正电路160d可包括被配置
为接收速度信号s
vel
的z分量并且从z分量移除dc偏移误差和/或偏置的任何合适的计算电路。
64.每个相位校正电路165a、165b、165c、165d可被配置为经由信号线或任何合适的通信线从其相关联的偏移校正电路160a、160b、160c、160d接收偏移校正输出信号s
oc_1
、s
oc_2
、s
oc_3
、s
oc_4
中的相应一者。每个相位校正电路165a、165b、165c、165d可被配置为通过生成在相位上相对于从偏移校正电路160a、160b、160c、160d中的一者供应给其的相位校正输出信号s
oc_1
、s
oc_2
、s
oc_3
、s
oc_4
位移的相位校正输出信号来校正存在于从偏移校正电路160a、160b、160c、160d中的一者接收到的偏移校正输出信号s
oc_1
、s
oc_2
、s
oc_3
、s
oc_4
中的相位偏移误差。
65.相位偏移误差可以是对于干扰信号128进行操作的任何给定频率在施加到系统100的干扰信号128与由传感器105检测到并施加到透镜142的所得的加速度信号之间的相位角差。相位偏移误差可由致动器控制电路120的未对准、传感器105的时间常数、超过传感器105的最大允许带宽的干扰信号的频率、在传感器105与致动器控制电路120之间的通信延迟等引起。例如,并且参考图8,当干扰信号128以100hz的频率操作并且被施加到系统100时,在施加到系统100的干扰信号128与由传感器105检测到并施加到透镜142的所得的加速度信号之间可存在相当大的相位偏移误差(例如,在20度内或在20度左右)。由于加速度信号引起力将被施加到透镜142,因此相位偏移误差可引起透镜142不受控制地振动。
66.第一相位校正电路165a可被配置为经由信号线或任何合适的通信线从第一偏移校正电路160a接收第一偏移校正信号s
oc_1
。第一相位校正电路165a可被进一步配置为根据第一偏移校正信号s
oc_1
生成第一相位校正信号s
pc_1
。
67.第一相位校正电路165a可包括能够基本上移除存在于第一偏移校正信号s
oc_1
中的相位偏移误差的一个或多个合适的滤波器,诸如无限脉冲响应(iir)滤波器等。一个或多个滤波器可以是低升压滤波器、高升压滤波器等。第一相位校正电路165a可被进一步配置为将第一相位校正信号s
pc_1
传输到第一计算电路170a以进行进一步处理。
68.第二相位校正电路165b可被配置为经由信号线或任何合适的通信线从第二偏移校正电路160b接收第二偏移校正信号s
oc_2
。第二相位校正电路165b可被进一步配置为根据第二偏移校正信号s
oc_2
生成第二相位校正信号s
pc_2
。
69.第二相位校正电路165b可包括能够基本上移除存在于第二偏移校正信号s
oc_2
中的相位偏移误差的一个或多个合适的滤波器,诸如无限脉冲响应(iir)滤波器等。一个或多个滤波器可以是低升压滤波器、高升压滤波器等。第二相位校正电路165b可被进一步配置为将第二相位校正信号s
pc_2
传输到第二计算电路170b和/或第三计算电路170c以进行进一步处理。
70.第三相位校正电路165c可被配置为经由信号线或任何合适的通信线从第三偏移校正电路160c接收第三偏移校正信号s
oc_3
。第三相位校正电路165c可被进一步配置为根据第三偏移校正信号s
oc_3
生成第三相位校正信号s
pc_3
。
71.第三相位校正电路165c可包括能够基本上移除存在于第三偏移校正信号s
oc_3
中的相位偏移误差的一个或多个合适的滤波器,诸如无限脉冲响应(iir)滤波器等。一个或多个滤波器可以是低升压滤波器、高升压滤波器等。第三相位校正电路165c可被进一步配置为将第三相位校正信号s
pc_3
传输到第四计算电路170d以进行进一步处理。
72.第四相位校正电路165d可被配置为经由信号线或任何合适的通信线从第四偏移校正电路160d接收第四偏移校正信号s
oc_4
。第四相位校正电路165d可被进一步配置为根据第四偏移校正信号s
oc_4
生成第四相位校正信号s
pc_4
。
73.第四相位校正电路165d可包括能够基本上移除存在于第四偏移校正信号s
oc_4
中的相位偏移误差的一个或多个合适的滤波器,诸如无限脉冲响应(iir)滤波器等。一个或多个滤波器可以是低升压滤波器、高升压滤波器等。第四相位校正电路165d可被进一步配置为将第四相位校正信号s
pc_4
传输到第五计算电路170e和/或第六计算电路170f以进行进一步处理。
74.在各种实施方案中,计算电路170a-170f可各自包括适用于执行各种计算诸如除法、乘法等的任何电路和/或系统。例如,每个计算电路可包括逻辑电路系统或现场可编程门阵列电路。计算电路可集成在致动器控制电路120内,或者另选地,可形成在致动器控制电路120可访问的伴随电路上。
75.第一计算电路170a可被配置为接收第一相位校正信号s
pc_1
并且根据第一相位校正信号s
pc_1
生成第一输出信号s
out_1
。例如,第一计算电路170a可被配置为计算第一相位校正信号s
pc_1
的平方。第一计算电路170a可被进一步配置为将第一相位校正信号s
pc_1
的计算出的平方以第一输出信号s
out_1
的形式传输到第一增益电路175a以进行进一步处理。在一个示例性实施方案中,第一输出信号s
out_1
可由以下等式描述:
76.s
out_1
=s
pc_12
(等式1)
77.第二计算电路170b可被配置为接收第二相位校正信号s
pc_2
并且根据第二相位校正信号s
pc_2
生成第二输出信号s
out_2
。例如,第二计算电路170b可被配置为计算第二相位校正信号s
pc_2
的平方。第二计算电路170b可被进一步配置为将第二相位校正信号s
pc_2
的计算出的平方以第二输出信号s
out_2
的形式传输到第三增益电路175c以进行进一步处理。在一个示例性实施方案中,第二输出信号s
out_2
可由以下等式描述:
78.s
out_2
=s
pc_22
(等式2)
79.第三计算电路170c可被配置为接收第二相位校正信号s
pc_2
并且根据第二相位校正信号s
pc_2
生成第三输出信号s
out_3
。例如,第三计算电路170c可被配置为计算第二相位校正信号s
pc_2
的一阶导数。第三计算电路170c可被进一步配置为将第二相位校正信号s
pc_2
的一阶导数以第三输出信号s
out_3
的形式传输到第五增益电路175e以进行进一步处理。在一个示例性实施方案中,第三输出信号s
out_3
可由以下等式描述:
[0080][0081]
第四计算电路170d可被配置为接收第三相位校正信号s
pc_3
并且根据第三相位校正信号s
pc_3
生成第四输出信号s
out_4
。例如,第四计算电路170d可被配置为计算第三相位校正信号s
pc_3
的平方。第四计算电路170d可被进一步配置为将第三相位校正信号s
pc_3
的平方以第四输出信号s
out_4
的形式传输到第七增益电路175g以进行进一步处理。在一个示例性实施方案中,第四输出信号s
out_4
可由以下等式描述:
[0082]sout_4
=s
pc_32
(等式4)
[0083]
第五计算电路170e可被配置为接收第四相位校正信号s
pc_4
并且根据第四相位校正信号s
pc_4
生成第五输出信号s
out_5
。例如,第五计算电路170e可被配置为计算第四相位校
正信号s
pc_4
的平方。第五计算电路170e可被进一步配置为将第四相位校正信号s
pc_4
的平方以第五输出信号s
out_5
的形式传输到第九增益电路175i以进行进一步处理。在一个示例性实施方案中,第五输出信号s
out_5
可由以下等式描述:
[0084]sout_5
=s
pc_42
(等式5)
[0085]
第六计算电路170f可被配置为接收第四相位校正信号s
pc_4
并且根据第四相位校正信号s
pc_4
生成第六输出信号s
out_6
。例如,第六计算电路170f可被配置为计算第四相位校正信号s
pc_4
的一阶导数。第六计算电路170f可被进一步配置为将第四相位校正信号s
pc_4
的一阶导数以第六输出信号s
out_6
的形式传输到第十一增益电路175k以进行进一步处理。在一个示例性实施方案中,第六输出信号s
out_6
可由以下等式描述:
[0086][0087]
第一增益电路175a可连接到第一计算电路170a的输出端子。第一增益电路175a可被配置为接收第一输出信号s
out_1
并且根据第一输出信号s
out_1
生成第一校正输出信号s
out_corr_1
。例如,第一增益电路175a可将第一校正增益a1施加到第一输出信号s
out_1
。在第一校正增益a1已经被施加到第一输出信号s
out_1
之后,所得的第一校正输出信号s
out_corr_1
可被发送到另一个电路部件诸如第二增益电路175b以进行进一步处理。第一增益电路175a可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0088]
第一校正增益a1可根据在传感器105与致动器115之间的第一距离确定。第一距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第一相对位置确定。第一相对位置可根据传感器105和致动器115的x轴坐标(诸如坐标xs、xa)确定。坐标xs、xa可相对于参考点定义。由于第一校正增益a1根据传感器105相对于致动器115的第一相对位置确定,因此可确定第一校正增益a1,而不管参考点位于何处。
[0089]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第一校正增益a1可与第一距离成比例。
[0090]
还应当理解,第一校正增益a1可被称为“表征系数”。由于第一校正增益a1是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0091]
第二增益电路175b可连接到第一增益电路175a的输出端子。第二增益电路175b可被配置为从第一增益电路175a接收第一校正输出信号s
out_corr_1
并且将第二校正增益a2施加到第一校正输出信号s
out_corr_1
。在第二校正增益a2已经被施加到第一校正输出信号s
out_corr_1
之后,所得的放大的第一校正输出信号可被传输到第一加法电路182a以进行附加的处理。第二增益电路175b可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0092]
应当理解,第二校正增益a2可称为“校准系数”。由于第二校正增益a2是“校准系数”,因此其可在制造的每个模块间改变。例如,每个模块可由其自身的特性(诸如透镜142的质量、与线圈152相关联的磁通量密度b以及线圈152的长度l)定义。鉴于m、b和l的值可在制造的不同模块间波动,第二校正增益a2可在不同模块间改变。
[0093]
第三增益电路175c可连接到第二计算电路170b的输出端子。第三增益电路175c可
被配置为接收第二输出信号s
out_2
并且根据第二输出信号s
out_2
生成第二校正输出信号s
out_corr_2
。例如,第三增益电路175c可将第三校正增益a3施加到第二输出信号s
out_2
。在第三校正增益a3已经被施加到第二输出信号s
out_2
之后,所得的第二校正输出信号s
out_corr_2
可被发送到另一个电路部件诸如第四增益电路175d以进行进一步处理。第三增益电路175c可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0094]
第三校正增益a3可根据在传感器105与致动器115之间的第二距离确定。第二距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第二相对位置确定。第二相对位置可根据传感器105和致动器115的x轴坐标(诸如坐标xs、xa)确定。如上文所讨论,坐标xs、xa可相对于参考点定义。由于第三校正增益a3根据传感器105相对于致动器115的第二相对位置确定,因此确定第三校正增益a3,而不管参考点位于何处。
[0095]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第三校正增益a3可与第二距离成比例。
[0096]
还应当理解,第三校正增益a3可被称为“表征系数”。由于第三校正增益a3是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0097]
第四增益电路175d可连接到第三增益电路175c的输出端子。第四增益电路175d可被配置为从第三增益电路175c接收第二校正输出信号s
out_corr_2
并且将第四校正增益a4施加到第二校正输出信号s
out_corr_2
。在第四校正增益a4已经被施加到第二校正输出信号s
out_corr_2
之后,所得的放大的第二校正输出信号可被传输到第二加法电路179a以进行附加的处理。第四增益电路175d可包括适用于接收输入信号并且将增益施加到输入信号的任何增益电路或任何其他电路和/或系统。
[0098]
应当理解,第四校正增益a4可称为“校准系数”。由于第四校正增益a4是“校准系数”,因此其可在制造的每个模块间改变,这如上文所讨论。在一些实施方案中,第四校正增益a4可等于第二校正增益a2。在其他实施方案中,第四校正增益a4可不等于第二校正增益a2。
[0099]
第五增益电路175e可连接到第三计算电路170c的输出端子。第五增益电路175e可被配置为接收第三输出信号s
out_3
并且根据第三输出信号s
out_3
生成第三校正输出信号s
out_corr_3
。例如,第五增益电路175e可将第五校正增益a5施加到第三输出信号s
out_3
。在第五校正增益a5已经被施加到第三输出信号s
out_3
之后,所得的第三校正输出信号s
out_corr_3
可被发送到另一个电路部件诸如第六增益电路175f以进行进一步处理。第五增益电路175e可包括适用于接收输入信号并且将增益施加到输入信号的任何增益电路或任何其他电路和/或系统。
[0100]
第五校正增益a5可根据在传感器105与致动器115之间的第三距离确定。第三距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第三相对位置确定。第三相对位置可根据传感器105和致动器115的y轴坐标(诸如坐标ys、ya)确定。坐标ys、ya可相对于参考点定义。由于第五校正增益a5根据传感器105相对于致动器115的第三相对位置确定,因此确定第五校正增益a5,而不管参考点位于何处。
[0101]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量
值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第五校正增益a5可与第三距离成比例。
[0102]
还应当理解,第五校正增益a5可被称为“表征系数”。由于第五校正增益a5是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0103]
第六增益电路175f可连接到第五增益电路175e的输出端子。第六增益电路175f可被配置为从第五增益电路175e接收第三校正输出信号s
out_corr_3
并且将第六校正增益a6施加到第三校正输出信号s
out_corr_3
。在第六校正增益a6已经被施加到第三校正输出信号s
out_corr_3
之后,所得的放大的第三校正输出信号s
out_corr_3
可被传输到第二加法电路179a,其中该信号可被加入到第二校正输出信号s
out_corr_2
以生成第一z旋转校正输出信号s
zrc_out_1
。第六增益电路175f可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0104]
应当理解,第六校正增益a6可称为“校准系数”。由于第六校正增益a6是“校准系数”,因此其可在制造的每个模块间改变,这如上文所讨论。在一些实施方案中,第六校正增益a6可等于第二校正增益a2。在其他实施方案中,第六校正增益a6可不等于第二校正增益a2。
[0105]
第七增益电路175g可连接到第四计算电路170d的输出端子。第七增益电路175g可被配置为接收第四输出信号s
out_4
并且根据第四输出信号s
out_4
生成第四校正输出信号s
out_corr_4
。例如,第七增益电路175g可将第七校正增益a7施加到第四输出信号s
out_4
。在第七校正增益a7已经被施加到第四输出信号s
out_4
之后,所得的第四校正输出信号s
out_corr_4
可被发送到另一个电路部件诸如第八增益电路175h以进行进一步处理。第七增益电路175g可包括适用于接收输入信号并且将增益施加到输入信号的任何增益电路或任何其他电路和/或系统。
[0106]
第七校正增益a7可根据在传感器105与致动器115之间的第四距离确定。第四距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第四相对位置确定。第四相对位置可根据传感器105和致动器115的y轴坐标(诸如坐标ys、ya)确定。如上文所讨论,坐标ys、ya可相对于参考点定义。由于第七校正增益a7根据传感器105相对于致动器115的第四相对位置确定,因此确定第七校正增益a7,而不管参考点位于何处。
[0107]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第七校正增益a7可与第四距离成比例。
[0108]
还应当理解,第七校正增益a7可被称为“表征系数”。由于第七校正增益a7是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0109]
第八增益电路175h可连接到第七增益电路175g的输出端子。第八增益电路175h可被配置为从第七增益电路175g接收第四校正输出信号s
out_corr_4
并且将第八校正增益a8施加到第四校正输出信号s
out_corr_4
。在第八校正增益a8已经被施加到第四校正输出信号s
out_corr_4
之后,所得的放大的第四校正输出信号可被传输到第三加法电路182b以进行附加的处理。第八增益电路175h可包括适用于接收输入信号并且将增益施加到输入信号的任何增益电路或任何其他电路和/或系统。
[0110]
应当理解,第八校正增益a8可称为“校准系数”。由于第八校正增益a8是“校准系
数”,因此其可在制造的每个模块间改变,这如上文所讨论。在一些实施方案中,第八校正增益a8可等于第二校正增益a2。在其他实施方案中,第八校正增益a8可不等于第二校正增益a2。
[0111]
第九增益电路175i可连接到第五计算电路170e的输出端子。第九增益电路175i可被配置为接收第五输出信号s
out_5
并且根据第五输出信号s
out_5
生成第五校正输出信号s
out_corr_5
。例如,第九增益电路175i可将第九校正增益a9施加到第五输出信号s
out_5
。在第九校正增益a9已经被施加到第五输出信号s
out_5
之后,所得的第五校正输出信号s
out_corr_5
可被发送到另一个电路部件诸如第十增益电路175j以进行进一步处理。第九增益电路175i可包括适用于接收输入信号并且将增益施加到输入信号的任何增益电路或任何其他电路和/或系统。
[0112]
第九校正增益a9可根据在传感器105与致动器115之间的第五距离确定。第五距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第五相对位置确定。第五相对位置可根据传感器105和致动器115的y轴坐标(诸如坐标ys、ya)确定。坐标ys、ya可相对于参考点定义。由于第九校正增益a9根据传感器105相对于致动器115的第五相对位置确定,因此确定第九校正增益a9,而不管参考点位于何处。
[0113]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第九校正增益a9可与第五距离成比例。
[0114]
还应当理解,第九校正增益a9可被称为“表征系数”。由于第九校正增益a9是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0115]
第十增益电路175j可连接到第九增益电路175i的输出端子。第十增益电路175j可被配置为从第九增益电路175i接收第五校正输出信号s
out_corr_5
并且将第十校正增益a
10
施加到第五校正输出信号s
out_corr_5
。在第十校正增益a
10
已经被施加到第五校正输出信号s
out_corr_5
之后,所得的放大的第五校正输出信号可被传输到第四加法电路179b以进行附加的处理。第十增益电路175j可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0116]
应当理解,第十校正增益a
10
可称为“校准系数”。由于第十校正增益a
10
是“校准系数”,因此其可在制造的每个模块间改变,这如上文所讨论。在一些实施方案中,第十校正增益a
10
可等于第二校正增益a2。在其他实施方案中,第十校正增益a
10
可不等于第二校正增益a2。
[0117]
第十一增益电路175k可连接到第六计算电路170f的输出端子。第十一增益电路175k可被配置为接收第六输出信号s
out_6
并且根据第六输出信号s
out_6
生成第六校正输出信号s
out_corr_6
。例如,第十一增益电路175k可将第十一校正增益a
11
施加到第六输出信号s
out_6
。在第十一校正增益a
11
已经被施加到第六输出信号s
out_6
之后,所得的第六校正输出信号s
out_corr_6
可被发送到另一个电路部件诸如第十二增益电路175l以进行进一步处理。第十一增益电路175k可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0118]
第十一校正增益a
11
可根据在传感器105与致动器115之间的第六距离确定。第六距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第六相对位置确定。第六相对
位置可根据传感器105和致动器115的x轴坐标(诸如坐标xs、xa)确定。坐标xs、xa可相对于参考点定义。由于第十一校正增益a
11
根据传感器105相对于致动器115的第六相对位置确定,因此确定第十一校正增益a
11
,而不管参考点位于何处。
[0119]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第十一校正增益a
11
可与第六距离成比例。
[0120]
还应当理解,第十一校正增益a
11
可被称为“表征系数”。由于第十一校正增益a
11
是“表征系数”,因此其可具有对于制造的每个电子设备(即,模块)保持相同的恒定值。
[0121]
第十二增益电路175l可连接到第十一增益电路175k的输出端子。第十二增益电路175l可被配置为从第十一增益电路175k接收第六校正输出信号s
out_corr_6
并且将第十二校正增益a
12
施加到第六校正输出信号s
out_corr_6
。在第十二校正增益a
12
已经被施加到第六校正输出信号s
out_corr_6
之后,所得的放大的第六校正输出信号可被传输到第四加法电路179b,其中该信号可被加入到第五校正输出信号s
out_corr_5
以生成第二z旋转校正输出信号s
zrc_out_2
。第十二增益电路175l可包括适用于接收输入信号并且将增益施加到输入信号的增益电路或任何其他电路和/或系统。
[0122]
应当理解,第十二校正增益a
12
可称为“校准系数”。由于第十二校正增益a
12
是“校准系数”,因此其可在制造的每个模块间改变,这如上文所讨论。在一些实施方案中,第十二校正增益a
12
可等于第二校正增益a2。在其他实施方案中,第十二校正增益a
12
可不等于第二校正增益a2。
[0123]
第一电路部分121可结合第二电路部分122操作以执行一系列方案,以补偿在传感器105与致动器115之间的距离可能对系统100的各种部件(包括致动器控制电路120的各种子部件)的影响。例如,系统100可执行y旋转向心力校正方案(1100)(例如,如图11所示)、第一z旋转校正方案(1200)(例如,如图12所示)、x旋转向心力校正方案(1300)(例如,如图13所示)和第二z旋转校正方案(1400)(例如,如图14所示)。
[0124]
例如,传感器105和致动器115可在电子设备中分开一定距离。另外,电子设备的串行通信协议可引起在传感器105与致动器115之间的通信延迟。因此,在由传感器105检测到的加速度信号与施加到透镜142的加速度信号之间可能存在相当大的差异。另外,可将偏移误差和/或偏置引入到该系统的各种部件中,这可进一步影响光学图像稳定系统和/或透镜的位置。
[0125]
鉴于致动器控制电路120可对由传感器105检测到的加速度信号执行多种操作,在传感器105与致动器115之间的任何通信延迟和/或引入到系统的各种部件中的dc偏移误差和/或偏置可造成在由致动器控制电路120生成的驱动信号s
dr
与所期望的驱动信号s
dr
之间的不匹配。鉴于驱动信号s
dr
可对应于施加到致动器115的特定电流值,当期望特定透镜位置时,致动器115将透镜142移动到目标位置所需的实际电流量可不同于由处理器110发出的位置指令值指定的电流值。因此,在传感器105与致动器115之间的距离可引起透镜位置的欠校正或透镜位置的过度校正。
[0126]
第一加法电路182a可被配置为根据加速度信号s
acc
的x分量、第一校正输出信号s
out_corr_1
和第一z旋转校正输出信号s
zrc_out_1
生成第一求和信号s
sum_1
。例如,第一加法电路182a可在将呈第一求和信号s
sum_1
的形式的和传输到第一惯性力消除电路190a之前将加速
度信号s
acc
的x分量、第一校正输出信号s
out_corr_1
和第一z旋转校正输出信号s
zrc_out_1
彼此相加以进行进一步处理。
[0127]
第三加法电路182b可被配置为根据加速度信号s
acc
的y分量、第四校正输出信号s
out_4_corr
和第二z旋转校正输出信号s
zrc_out_2
生成第二求和信号s
sum_2
。例如,第二加法电路182b可在将呈第二求和信号s
sum_2
的形式的和传输到第二惯性力消除电路190b之前将加速度信号s
acc
的y分量、第四校正输出信号s
out_4_corr
和第二z旋转校正输出信号s
zrc_out_2
彼此相加以进行进一步处理。
[0128]
第一电路部分121和第二电路部分122可各自被配置为接收并处理速度信号s
vel
和加速度信号s
acc
。第一电路部分121可被进一步配置为接收第一求和信号s
sum_1
并且根据第一求和信号s
sum_1
、速度信号s
vel
和加速度信号s
acc
生成第一驱动信号s
dr_1
。第二电路部分122可被进一步配置为接收第二求和信号s
sum_2
并且根据第二求和信号s
sum_2
、速度信号s
vel
和加速度信号s
acc
生成第二驱动信号s
dr_2
。
[0129]
在各种实施方案中,第一电路部分121还可包括第一惯性力校正电路190a、第一陀螺仪滤波器155a和第一加速度滤波器156a。第二电路部分122还可包括第二惯性力校正电路190b、第二陀螺仪滤波器155b和第二加速度滤波器156b。
[0130]
在各种实施方案中,第一惯性力消除电路190a可包括连接到第一加法电路182a的输出端子的输入端子。第一惯性力消除电路190a可被配置为接收第一求和信号s
sum_1
,并且基于透镜142的目标位置的x分量来将增益施加到求和信号s
sum_1
,以补偿重力和干扰信号128对系统100中的各种部件诸如透镜142的影响。
[0131]
第一惯性力消除电路190a可被进一步配置为根据第一求和信号s
sum_1
生成第一惯性力校正信号s
ifc_out_1
。例如,惯性力消除电路190a可将第一求和信号s
sum_1
放大一个或多个预先确定的系数,以匹配产生必需的第一驱动力f
dr_1
所需的第一驱动信号s
dr_1
的振幅,从而抵消由重力和干扰信号128施加到透镜142的惯性力的x分量。第一惯性力消除电路190a可被进一步配置为将第一惯性力校正信号s
ifc_out_1
传输到第五加法电路184a以进行附加的处理。
[0132]
在各种实施方案中,第二惯性力消除电路190b可包括连接到第三加法电路182b的输出端子的输入端子。第二惯性力消除电路175b可被配置为接收第二求和信号s
sum_2
,并且基于透镜142的目标位置的y分量来将增益施加到第二求和信号s
sum_2
,以补偿重力和干扰信号128对系统100中的各种部件诸如透镜142的影响。
[0133]
第二惯性力消除电路190b可被进一步配置为根据第二求和信号s
sum_2
生成第二惯性力校正信号s
ifc_out_2
。例如,第二惯性力消除电路190b可将第二求和信号s
sum_2
放大一个或多个预先确定的系数,以匹配产生必需的第二驱动力f
dr_2
所需的第二驱动信号s
dr_2
的振幅,从而抵消由重力和干扰信号128施加到透镜142的惯性力的y分量。第二惯性力消除电路190b可被进一步配置为将第二惯性力校正信号s
ifc_out_2
传输到第六加法电路184b以进行附加的处理。
[0134]
每个惯性力消除电路190a、190b可被配置为执行各种功能,诸如滤波、放大、信号转换、分析等,以补偿重力和干扰信号128对系统100中的各种部件的影响。惯性力消除电路190a、190b可包括能够衰减第一求和信号s
sum_1
和第二求和信号s
sum_2
的各种频率以便基本上消除存在于第一求和信号s
sum_1
和第二求和信号s
sum_2
中的任何相位偏移误差的一个或多
个合适的滤波器,诸如低升压滤波器、高升压滤波器等。惯性力校正电路190a、190b还可包括能够放大求和信号s
sum_1
、s
sum_2
的任何合适的信号增益控制器,诸如衰减器、增益电路等。
[0135]
例如,并且现在参考图15,虚线示出了不启用惯性力校正的状态。当干扰信号128作用于系统100上时,透镜142可经历惯性力f。如果不启用校正,则透镜142可例如与目标位置偏离δx和/或δy。鉴于与相应目标位置相关联的特定位置指令值,实际透镜位置可不等于目标位置。位置指令值可对应于施加到致动器115的特定电流值,因此,当期望特定透镜位置时,由致动器115所需的实际电流量可不同于由位置指令值指定的电流量,这可因在传感器105与致动器115之间的不可忽略的距离而进一步加剧。
[0136]
根据各种实施方案,系统100还可包括存储器(未示出),该存储器被配置为存储计算出的校正增益值a1至a
12
。存储器可包括闪存存储器或任何其他合适的存储器类型。另外,存储器可集成在致动器控制电路120内,或者另选地,可形成在致动器控制电路120可访问的伴随电路上。
[0137]
陀螺仪滤波器155a、155b和加速度滤波器156a、156b可对信号(例如,速度信号s
vel
和加速度信号s
acc
)执行各种功能,诸如积分和频率特性调整(即,dc切割)。例如,陀螺仪滤波器155a、155b和加速度滤波器156a、156b可分别对速度信号s
vel
的角速度和加速度信号s
acc
的角加速度进行积分,并且防止信号以不期望的频率传输。陀螺仪滤波器155a、155b和加速度滤波器156a和156b可连接在传感器105与第一驱动器电路181a和第二驱动器电路181b之间。在各种实施方案中,陀螺仪滤波器155a、155b和加速度滤波器156a、156b可各自包括接口(i/f)电路(未示出)和积分器电路(未示出)。陀螺仪滤波器155a、155b和加速度滤波器156a、156b可彼此结合操作以计算透镜142的目标位置。
[0138]
在各种实施方案中,每个陀螺仪滤波器155a、155b可包括输入端子,并且可被配置为接收速度信号s
vel
的x分量和y分量中的一者。每个陀螺仪滤波器155a、155b可被配置为利用速度信号s
vel
的x分量和y分量中的一者生成相应输出信号。例如,第一陀螺仪滤波器155a可被配置为接收速度信号s
vel
的y分量并且根据速度信号s
vel
的y分量生成第一陀螺仪滤波器输出信号s
gf_out_1
。类似地,第二陀螺仪滤波器155b可被配置为接收速度信号s
vel
的x分量并且根据速度信号s
vel
的x分量生成第二陀螺仪滤波器输出信号s
gf_out_2
。
[0139]
每个陀螺仪滤波器输出信号s
gf_out_1
、s
gf_out_2
可控制致动器115中的电流或电压,这可控制致动器115的移动。因此,致动器115(或致动器115的一部分)的移动可与每个陀螺仪滤波器输出信号s
gf_out_1
、s
gf_out_2
的量值成比例。每个陀螺仪滤波器输出信号s
gf_out_1
、s
gf_out_2
可包括任何合适的驱动信号,诸如电流信号、电压信号等。第一陀螺仪滤波器155a可被进一步配置为将第一陀螺仪滤波器输出信号s
gf_out_1
传输到致动器控制电路120的另一个部分和/或子电路诸第一线性校正电路157a以用于进一步处理。第一线性校正电路157a可将增益施加到第一陀螺仪滤波器输出信号s
gf_out_1
。
[0140]
类似地,第二陀螺仪滤波器155b可被进一步配置为将第二陀螺仪滤波器输出信号s
gf_out_2
传输到致动器控制电路120的另一个部分和/或子电路诸第二线性校正电路157b以用于进一步处理。第二线性校正电路157b可将增益施加到第二陀螺仪滤波器输出信号s
gf_out_2
。
[0141]
例如,每个陀螺仪滤波器155a、155b可将速度信号s
vel
的x分量和y分量中的一者转换为相应抖动角,其中每个抖动角可与速度信号s
vel
的x分量和y分量中的一者相关联。陀螺
仪滤波器155a、155b可根据其相应抖动角确定透镜142在每个方向上的目标位置。例如,第一陀螺仪滤波器155a可接收速度信号s
vel
的y分量并且计算积分以生成其相应抖动角。然后,第一陀螺仪滤波器155a可根据计算出的抖动角确定透镜142在x轴方向上的目标位置。第一陀螺仪滤波器155a可将以第一陀螺仪滤波器输出信号s
gf_out_1
的形式的目标位置传输到致动器控制电路120的另一个部分诸如第一线性校正电路157a以用于附加的处理。
[0142]
每个加速度滤波器156a、156b可包括输入端子,并且被配置为接收加速度信号s
acc
的x分量和y分量中的一者。例如,第一加速度滤波器156a可被配置为接收加速度信号s
acc
的x分量,而第二加速度滤波器156b可被配置为接收加速度信号s
acc
的y分量。
[0143]
在各种实施方案中,加速度滤波器156a、156b可被配置为利用加速度信号s
acc
的x分量和y分量中的一者生成相应输出信号。例如,第一加速度滤波器156a可被配置为根据加速度信号s
acc
的x分量生成第一加速度滤波器输出信号s
af_out_1
。类似地,第二加速度滤波器156b可被配置为根据加速度信号s
acc
的y分量生成第二加速度滤波器输出信号s
af_out_2
。
[0144]
每个加速度滤波器输出信号s
af_out_1
、s
af_out_2
可控制致动器115中的电流或电压,这可控制致动器115的移动。因此,致动器115(或致动器115的一部分)的移动可与每个加速度滤波器输出信号s
af_out_1
、s
af_out_2
的量值成比例。每个加速度滤波器输出信号s
af_out_1
、s
af_out_2
可包括任何合适的驱动信号,诸如电流信号、电压信号等。第一加速度滤波器156a可被进一步配置为将第一加速度滤波器输出信号s
af_out_1
传输到致动器控制电路120的另一个部分和/或子电路诸第一陀螺仪滤波器155a以用于进一步处理。类似地,第二加速度滤波器156b可被进一步配置为将第二加速度滤波器输出信号s
af_out_2
传输到致动器控制电路120的另一个部分和/或子电路诸第二陀螺仪滤波器155b以用于进一步处理。
[0145]
例如,加速度滤波器156a、156b可执行加速度信号s
acc
的x分量和y分量的双重积分以生成透镜142的相应位置信号。位置信号可用于计算与目标位置的偏差。加速度滤波器156a、156b可分别将其呈加速度滤波器输出信号s
af_out_1
、s
af_out_2
的形式的相应计算偏差传输到致动器控制电路120的另一个部分诸如陀螺仪滤波器155a、155b,其中计算出的偏差可用于确定透镜142在x轴方向和y轴方向上要设定的目标位置。每个目标位置可相对于在x-y-z参考坐标系上的参考点和重力。
[0146]
在操作中,生成驱动信号s
dr
可包括分别从陀螺仪传感器106和加速度传感器107接收第一输入信号诸如速度信号s
vel
和第二输入信号诸如加速度信号s
acc
。生成驱动信号s
dr
还可包括基于第一输入信号生成一个或多个偏移校正信号,并且基于第二输入信号生成一个或多个偏移校正信号。生成驱动信号s
dr
还可包括根据基于第一输入信号生成的一个或多个偏移校正信号生成一个或多个相位校正信号。生成驱动信号s
dr
还可包括根据基于第二输入信号生成的一个或多个偏移校正信号生成一个或多个相位校正信号。
[0147]
生成驱动信号s
dr
还可包括:根据一个或多个相位校正信号生成多个输出信号;根据传感器105和致动器115的位置计算多个校正增益值;以及将多个校正增益值施加到多个输出信号。生成驱动信号s
dr
还可包括根据放大的输出信号和第二输入信号生成驱动信号s
dr
。
[0148]
现在参考图11-图14,在系统启动时,可在x轴方向、y轴方向和/或z轴方向上向系统100施加信号诸如干扰信号128。传感器105可检测到干扰信号128并且从检测到的干扰信号128生成信号。该信号可包括对应于设备的角速度的第一输入信号(即,速度信号s
vel
)和/
或对应于设备的加速度的第二输入信号(即,加速度信号s
acc
)。速度信号s
vel
可包括第一x分量、第一y分量和第一z分量,并且加速度信号s
acc
可包括第二x分量和第二y分量。
[0149]
陀螺仪传感器106可将速度信号s
vel
传输到致动器控制电路120以进行处理,并且加速度传感器107可将加速度信号s
acc
传输到致动器控制电路120以进行处理。例如,速度信号s
vel
的y分量可被传输到第一偏移校正电路160a,速度信号s
vel
的x分量可被传输到第三偏移校正电路160c,并且速度信号s
vel
的z分量可被传输到第二偏移校正电路160b和第四偏移校正电路160d。
[0150]
此时,系统100可执行y旋转向心力校正方案(1100)(例如,如图11所示)、第一z旋转校正方案(1200)(例如,如图12所示)、x旋转向心力校正方案(1300)(例如,如图13所示)和第二z旋转校正方案(1400)(例如,如图14所示)。
[0151]
根据一个示例性实施方案,并且现在参考图11,在接收到速度信号的y分量时(1105),第一偏移校正电路160a可通过校正存在于速度信号s
vel
的y分量中的dc偏移误差和/或偏置来开始校准驱动信号s
dr
(1110)。为了根据某些实施方案校正dc偏移误差和/或偏置,可能期望维持零dc偏移误差和/或偏置。
[0152]
因此,第一偏移校正电路160a可接收速度信号s
vel
的y分量,并且根据速度信号s
vel
的y分量生成第一偏移校正信号s
oc_1
。第一偏移校正电路160a可通过从速度信号s
vel
的y分量减去量值等于dc偏移误差和/或偏置的信号来生成第一偏移校正信号s
oc_1
。
[0153]
每个dc偏移误差和/或偏置的量值可以任何合适的方式确定。例如,dc偏移误差和/或偏置的量值可使用任何合适的校准方法预先确定,诸如通过在陀螺仪传感器106在参考状态下操作时(即,其中陀螺仪传感器106不受干扰信号128作用)测量由陀螺仪传感器106检测到的信号的振幅。由于陀螺仪传感器106在参考状态期间不受干扰信号128作用,因此检测到的信号可被认为是噪声信号。
[0154]
应当理解,可从陀螺仪传感器106取得大量噪声读数,使得可确定噪声信号的平均振幅以更准确地确定偏移误差和/或偏置的量值。
[0155]
在第一偏移校正电路160a生成第一偏移校正信号s
oc
_1之后,第一偏移校正电路160a可将第一偏移校正信号s
oc
_1传输到第一相位校正电路165a以进行附加的处理。
[0156]
在由第一相位校正电路165a接收到第一偏移校正信号s
oc
_1时,第一偏移校正信号s
oc
_1可包括相位偏移误差。换句话讲,第一偏移校正信号s
oc
_1可在相位上相对于从陀螺仪传感器106供应给第一偏移校正电路160a的速度信号s
vel
的y分量位移。因此,校准驱动信号s
dr
还可包括校正存在于第一偏移校正信号s
oc
_1中的相位偏移误差。
[0157]
在从第一偏移校正电路160a接收到第一偏移校正信号s
oc
_1时,第一相位校正电路165a可校正存在于第一偏移校正信号s
oc
_1中的相位偏移误差(1115)。例如,第一相位校正电路165a可应用任何合适的相位补偿技术来根据第一偏移校正信号s
oc_1
生成第一相位校正信号s
pc_1
。
[0158]
为了根据某些实施方案校正第一偏移校正信号s
oc_1
,可能期望维持零相位偏移误差和/或偏置。因此,可包括一个或多个iir滤波器等的第一相位校正电路165a可使第一偏移校正信号s
oc_1
在相位上位移等于相位偏移误差的量。然后,第一相位校正电路165a可将第一相移偏移校正信号s
oc_1
以第一相位校正信号s
pc_1
的形式传输到第一计算电路170a以进行进一步处理。
[0159]
在从第一计算电路170a接收到第一相位校正信号s
pc_1
时,生成驱动信号s
dr
还可包括经由第一计算电路170a根据第一相位校正信号s
pc_1
生成第一输出信号s
out_1
。此时,第一计算电路170a可计算第一相位校正信号s
pc_1
的平方(1120)。然后,第一计算电路170a可将第一相位校正信号s
pc_1
的计算出的平方以第一输出信号s
out_1
的形式传输到第一增益电路175a以进行进一步处理。在一个示例性实施方案中,第一输出信号s
out_1
可由以上等式1描述。
[0160]
此时,并且现在参考图9,传感器105可位于距旋转中心(即,参考点)的距离δds处,并且致动器115可位于距旋转中心的距离δda处。旋转中心可由坐标(x0,y0,z0)定义。
[0161]
距离δds可相对于所定义的x-y-z坐标系的x轴形成传感器角θs。因此,传感器105可位于坐标(xs,ys,z0)处,其中坐标xs可由以下等式描述:
[0162]
xs=rs*cosθs(等式7)
[0163]
并且其中坐标ys可由以下等式描述:
[0164]ys
=rs*cosθs(等式8)
[0165]
类似地,距离δda可相对于所定义的x-y-z坐标系的x轴形成致动器角θa。因此,致动器115可位于坐标(xa,ya,z0)处,其中坐标xa可由以下等式描述:
[0166]
xa=ra*cosθa(等式9)
[0167]
其中坐标ya可由以下等式描述:
[0168]
ya=ra*cosθa(等式10)
[0169]
坐标xs可表示在传感器105与旋转中心之间的距离,并且坐标xa可表示在致动器115与旋转中心之间的距离。
[0170]
应当理解,坐标(xs,ys,z0)可不同于坐标(xa,ya,z0)。还应当理解,参考位置可被定义为电子设备的旋转中心。还应当理解,参考坐标可以是任何合适的坐标。
[0171]
在第一增益电路175a从第一计算电路170a接收到第一输出信号s
out_1
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第一校正增益a1传输到第一增益电路175a。
[0172]
可根据在传感器105与致动器115之间的第一距离确定第一校正增益a1,该第一校正增益可以是预先确定的。第一距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第一相对位置确定。第一相对位置可分别根据传感器105的x轴坐标xs和致动器115的x轴坐标xa确定。由于第一校正增益a1根据传感器105相对于致动器115的第一相对位置确定,因此可确定第一校正增益a1,而不管旋转中心位于何处。
[0173]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第一校正增益a1可与第一距离成比例。
[0174]
还应当理解,第一校正增益a1可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0175]
生成第一驱动信号s
dr
还可包括经由第一增益电路175a将第一校正增益a1施加到第一输出信号s
out_1
(1125)。在第一校正增益a1被施加到第一输出信号s
out_1
之后,所得的第一校正输出信号s
out_corr_1
可被传输到第二增益电路175b,其中第二校正增益a2可被施加到
第一校正输出信号s
out_corr_1
。
[0176]
应当理解,第二校正增益a2可在所制造的每个模块间改变。例如,每个模块可由其自身的特性(诸如透镜142的质量、与线圈152相关联的磁通量密度b以及线圈152的长度l)定义。鉴于m、b和l的值可在制造的不同模块间波动,第二校正增益a2可在不同模块间改变。
[0177]
在第二校正增益a2被施加到第一校正输出信号s
out_corr_1
之后,经由第二增益电路175b,所得的放大的第一校正输出信号s
out_corr_1
然后可被传输到另一个电路部件(诸如第一加法电路182a)以进行进一步处理。
[0178]
此时,可经由第一加法电路182a使所得的所放大的第一校正输出信号s
out_corr_1
与加速度信号s
acc
的x分量彼此相加(1130)。
[0179]
在完成y旋转向心力校正过程之后,系统100可执行编程循环的另一次迭代(1135)。
[0180]
在系统100正在执行y旋转向心力校正过程(即,步骤1100至1135)时,系统100可同时地执行第一z旋转校正方案。另选地,系统可在第一z旋转校正方案之前或之后执行y旋转向心力校正过程(即,步骤1100至1135)。
[0181]
根据一个示例性实施方案,并且现在参考图12,在接收到速度信号s
vel
的z分量时(1205),第二偏移校正电路160b可通过校正存在于速度信号s
vel
的z分量中的dc偏移误差和/或偏置来开始校准驱动信号s
dr
(1210)。为了根据某些实施方案校正dc偏移误差和/或偏置,可能期望维持零dc偏移误差和/或偏置。
[0182]
因此,第二偏移校正电路160b可接收速度信号s
vel
的z分量,并且根据速度信号s
vel
的z分量生成第二偏移校正信号s
oc_2
。第二偏移校正电路160b可通过从速度信号s
vel
的z分量减去量值等于dc偏移误差和/或偏置的信号来生成第二偏移校正信号s
oc_2
。dc偏移误差和/或偏置的量值可以任何合适的方式确定,这如上文所讨论。
[0183]
在第二偏移校正电路160b生成第二偏移校正信号s
oc_2
之后,第二偏移校正电路160b可将第二偏移校正信号s
oc_2
传输到第二相位校正电路165b以进行附加的处理。
[0184]
在由第二相位校正电路165b接收到第二偏移校正信号s
oc
_2时,第二偏移校正信号s
oc
_2可包括相位偏移误差。换句话讲,第二偏移校正信号s
oc
_2可在相位上相对于从陀螺仪传感器106供应给第二偏移校正电路160b的速度信号s
vel
的z分量位移。因此,校准驱动信号s
dr
还可包括校正存在于第二偏移校正信号s
oc
_2中的相位偏移误差。
[0185]
在从第二偏移校正电路160b接收到第二偏移校正信号s
oc
_2时,第二相位校正电路165b可校正存在于第二偏移校正信号s
oc
_2中的相位偏移误差(1215)。例如,第二相位校正电路165b可应用任何合适的相位补偿技术(这如上文所讨论)来根据第二偏移校正信号s
oc_2
生成第二相位校正信号s
pc_2
。
[0186]
然后,第二相位校正电路165b可将第二相移偏移校正信号s
oc_2
以第二相位校正信号s
pc_2
的形式传输到第二计算电路170b和第三计算电路170c以进行进一步处理。
[0187]
在从第二计算电路170b接收到第二相位校正信号s
pc_2
时,生成驱动信号s
dr
还可包括经由第二计算电路170b根据第二相位校正信号s
pc_2
生成第二输出信号s
out_2
。此时,第二计算电路170b可计算第二相位校正信号s
pc_2
的平方(1220a)。然后,第二计算电路170b可将第二相位校正信号s
pc_2
的计算出的平方以第二输出信号s
out_2
的形式传输到第三增益电路175c以进行进一步处理。在一个示例性实施方案中,第二输出信号s
out_2
可由以上等式2描
述。
[0188]
在第三增益电路175c从第二计算电路170b接收到第二输出信号s
out_2
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第三校正增益a3传输到第三增益电路175c。
[0189]
可根据在传感器105与致动器115之间的第二距离确定第三校正增益a3,该第三校正增益可以是预先确定的。第二距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第二相对位置确定。第二相对位置可分别根据传感器105的x轴坐标xs和致动器115的x轴坐标xa确定。由于第三校正增益a3根据传感器105相对于致动器115的第二相对位置确定,因此可确定第三校正增益a3,而不管旋转中心位于何处。
[0190]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第三校正增益a3可与第二距离成比例。
[0191]
还应当理解,第三校正增益a3可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0192]
生成驱动信号s
dr
还可包括经由第三增益电路175c将第三校正增益a3施加到第二输出信号s
out_2
(1225a)。在第三校正增益a3被施加到第二输出信号s
out_2
之后,所得的第二校正输出信号s
out_corr_2
可被传输到第四增益电路175d,其中第四校正增益a4可被施加到第二校正输出信号s
out_corr_2
。
[0193]
在一些实施方案中,第四校正增益a4可等于第二校正增益a2。在其他实施方案中,第四校正增益a4可不等于第二校正增益a2。
[0194]
在第四校正增益a4被施加到第二校正输出信号s
out_corr_2
之后,经由第四增益电路175d,所得的放大的第二校正输出信号s
out_corr_2
然后可被传输到另一个电路部件(诸如第二加法电路179a)以进行进一步处理。
[0195]
在系统100执行步骤1220a至1225a时,系统100可同时地执行步骤1220b至1225b。另选地,系统100可在步骤1220b至1225b之前或之后执行步骤1220a至1225a。生成驱动信号s
dr
还可包括根据第二相位校正信号s
pc_2
生成第三输出信号s
out_3
。此时,第三计算电路170c可计算第二相位校正信号s
pc_2
的一阶导数(1220b)。然后,第三计算电路170c可将第二相位校正信号s
pc_2
的计算出的一阶导数以第三输出信号s
out_3
的形式传输到第五增益电路175e以进行进一步处理。在一个示例性实施方案中,第三输出信号s
out_3
可由以上等式3描述。在第五增益电路175e从第三计算电路170c接收到第三输出信号s
out_3
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第五校正增益a5传输到第五增益电路175e。
[0196]
可根据在传感器105与致动器115之间的第三距离确定第五校正增益a5,该第五校正增益可以是预先确定的。第三距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第三相对位置确定。第三相对位置可根据传感器105和致动器115的y轴坐标(即ys、ya)确定。由于第五校正增益a5根据传感器105相对于致动器115的第三相对位置确定,因此可确定第五校正增益a5,而不管旋转中心位于何处。
[0197]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第五校正增益a5可
与第三距离成比例。
[0198]
还应当理解,第五校正增益a5可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0199]
生成第一驱动信号s
dr
还可包括经由第五增益电路175e将第五校正增益a5施加到第三输出信号s
out_3
(1225b)。在第五校正增益a5被施加到第三输出信号s
out_3
之后,所得的第三校正输出信号s
out_corr_3
可被传输到第六增益电路175f,其中第六校正增益a6可被施加到第三校正输出信号s
out_corr_6
。
[0200]
在一些实施方案中,第六校正增益a6可等于第二校正增益a2。在其他实施方案中,第六校正增益a6可不等于第二校正增益a2。
[0201]
在第六校正增益a6被施加到第三校正输出信号s
out_3_corr
之后,所得的放大的第三校正输出信号s
out_3_corr
可被传输到另一个电路部件(诸如第二加法电路179a)以进行进一步处理。
[0202]
此时,可经由第二加法电路179a使放大的第二校正输出信号s
out_corr_2
和放大的第三校正输出信号s
out_corr_3
彼此相加(1230)。然后,第二加法电路179a可将所得的和以第一z旋转校正输出信号s
zrc_out_1
的形式传输到第一加法电路182a,其中第一z旋转校正输出信号s
zrc_out_1
可在以第一求和信号s
sum_1
的形式传输到第一惯性力消除电路190a之前加入到第一校正输出信号s
out_corr_1
以及加速度信号s
acc
的x分量(1135)以进行进一步处理。
[0203]
在完成第一z旋转校正方案之后,可由系统100执行编程循环的另一次迭代(1240)。
[0204]
在系统100正在执行y旋转向心力校正方案(即,步骤1100至1135)和第一z旋转校正方案(即,步骤1200至1240)时,系统100可同时地执行x旋转向心力校正方案。另选地,系统100可按顺序执行方案。
[0205]
根据一个示例性实施方案,并且现在参考图13,在接收到速度信号s
vel
的x分量时(1305),第三偏移校正电路160c可通过校正存在于速度信号s
vel
的x分量中的dc偏移误差和/或偏置来开始校准驱动信号s
dr
(1310)。为了根据某些实施方案校正dc偏移误差和/或偏置,可能期望维持零dc偏移误差和/或偏置。
[0206]
因此,第三偏移校正电路160c可接收速度信号s
vel
的x分量,并且根据速度信号s
vel
的x分量生成第三偏移校正信号s
oc_3
。第三偏移校正电路160c可通过从速度信号s
vel
的x分量减去量值等于dc偏移误差和/或偏置的信号来生成第三偏移校正信号s
oc_3
。dc偏移误差和/或偏置的量值可以任何合适的方式确定,这如上文所讨论。
[0207]
在第三偏移校正电路160c生成第三偏移校正信号s
oc
_3之后,第三偏移校正电路160c可将第三偏移校正信号s
oc
_3传输到第三相位校正电路165c以进行附加的处理。
[0208]
在由第三相位校正电路165c接收到第三偏移校正信号s
oc
_3时,第三偏移校正信号s
oc
_3可包括相位偏移误差。换句话讲,第三偏移校正信号s
oc
_3可在相位上相对于从陀螺仪传感器106供应给第三偏移校正电路160c的速度信号s
vel
的x分量位移。因此,校准驱动信号s
dr
还可包括校正存在于第三偏移校正信号s
oc
_3中的相位偏移误差。
[0209]
在从第三偏移校正电路160c接收到第三偏移校正信号s
oc_3
时,第三相位校正电路165c可校正存在于第三偏移校正信号s
oc_3
中的相位偏移误差(1315)。例如,第三相位校正
电路165c可应用任何合适的相位补偿技术(这如上文所讨论)来根据第三偏移校正信号s
oc_3
生成第三相位校正信号s
pc_3
。
[0210]
然后,第三相位校正电路165c可将第三相移偏移校正信号s
oc_3
以第三相位校正信号s
pc_3
的形式传输到第四计算电路170a以进行进一步处理。
[0211]
在从第三相位校正电路165c接收到第三相位校正信号s
pc_3
时,生成驱动信号s
dr
还可包括经由第四计算电路170d根据第三相位校正信号s
pc_3
生成第四输出信号s
out_4
。此时,第四计算电路170d可计算第三相位校正信号s
pc_3
的平方(1320)。然后,第四计算电路170d可将第三相位校正信号s
pc_3
的计算出的平方以第四输出信号s
out_4
的形式传输到第七增益电路175g以进行进一步处理。在一个示例性实施方案中,第四输出信号s
out_4
可由以上等式4描述。在第七增益电路175g从第四计算电路170d接收到第四输出信号s
out_4
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第七校正增益a7传输到第七增益电路175g。
[0212]
可根据在传感器105与致动器115之间的第四距离确定第七校正增益a7,该第七校正增益可以是预先确定的。第四距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第四相对位置确定。第四相对位置可分别根据传感器105的y轴坐标ys和致动器115的x轴坐标ya确定。由于第七校正增益a7根据传感器105相对于致动器115的第四相对位置确定,因此可确定第七校正增益a7,而不管旋转中心位于何处。
[0213]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第七校正增益a7可与第四距离成比例。
[0214]
还应当理解,第七校正增益a7可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0215]
生成驱动信号s
dr
还可包括经由第七增益电路175g将第七校正增益a7施加到第四输出信号s
out_4
(1325)。在第七校正增益a7被施加到第四输出信号s
out_4
之后,所得的第四校正输出信号s
out_corr_4
可被传输到第八增益电路175h,其中第八校正增益a8可被施加到第四校正输出信号s
out_corr_4
。
[0216]
在一些实施方案中,第八校正增益a8可等于第二校正增益a2。在其他实施方案中,第八校正增益a8可不等于第二校正增益a2。
[0217]
在第八校正增益a8被施加到第四校正输出信号s
out_corr_4
之后,所得的放大的第四校正输出信号s
out_corr_4
可被传输到另一个电路部件(诸如第三加法电路182b)以进行进一步处理。
[0218]
此时,可经由第三加法电路182b使所得的所放大的第四校正输出信号s
out_corr_4
与加速度信号s
acc
的y分量彼此相加(1330)。
[0219]
在完成x旋转校正过程之后,可由系统100执行编程循环的另一次迭代(1335)。
[0220]
在系统100正在执行x旋转向心力校正过程(即,步骤1300至1335)时,系统100可同时地执行第二z旋转校正方案。另选地,系统100可在第二z旋转校正方案之前或之后执行x旋转向心力校正过程(即,步骤1300至1335)。
[0221]
根据一个示例性实施方案,并且现在参考图14,在接收到速度信号s
vel
的z分量时
(1405),第四偏移校正电路160d可通过校正存在于速度信号s
vel
的z分量中的dc偏移误差和/或偏置来开始执行第二z旋转校正方案(1410)。为了根据某些实施方案校正dc偏移误差和/或偏置,可能期望维持零dc偏移误差和/或偏置。
[0222]
因此,第四偏移校正电路160d可接收速度信号s
vel
的z分量,并且根据速度信号s
vel
的z分量生成第四偏移校正信号s
oc_4
。第四偏移校正电路160d可通过从速度信号s
vel
的z分量减去量值等于dc偏移误差和/或偏置的信号来生成第四偏移校正信号s
oc_4
。dc偏移误差和/或偏置的量值可以任何合适的方式确定,这如上文所讨论。
[0223]
在第四偏移校正电路160d生成第四偏移校正信号s
oc_4
之后,第四偏移校正电路160d可将第四偏移校正信号s
oc_4
传输到第四相位校正电路165d以进行附加的处理。
[0224]
在由第四相位校正电路165d接收到第四偏移校正信号s
oc
_4时,第四偏移校正信号s
oc
_4可包括相位偏移误差。换句话讲,第四偏移校正信号s
oc
_4可在相位上相对于从陀螺仪传感器106供应给第四偏移校正电路160d的速度信号s
vel
的z分量位移。因此,校准驱动信号s
dr
还可包括校正存在于第四偏移校正信号s
oc
_4中的相位偏移误差。
[0225]
在从第四偏移校正电路160d接收到第四偏移校正信号s
oc
_4时,第四相位校正电路165d可校正存在于第四偏移校正信号s
oc
_4中的相位偏移误差(1415)。例如,第四相位校正电路165d可应用任何合适的相位补偿技术(这如上文所讨论)来根据第四偏移校正信号s
oc_4
生成第四相位校正信号s
pc_4
。
[0226]
然后,第四相位校正电路165d可将第四相移偏移校正信号s
oc_4
以第四相位校正信号s
pc_4
的形式传输到第五计算电路170e和第六计算电路170f以进行进一步处理。
[0227]
在从第四相位校正电路165d接收到第四相位校正信号s
pc_4
时,生成驱动信号s
dr
还可包括经由第五计算电路170e根据第四相位校正信号s
pc_4
生成第五输出信号s
out_5
。此时,第五计算电路170e可计算第四相位校正信号s
pc_4
的平方(1420a)。然后,第五计算电路170e可将第四相位校正信号s
pc_4
的计算出的平方以第五输出信号s
out_5
的形式传输到第九增益电路175i以进行进一步处理。在一个示例性实施方案中,第五输出信号s
out_5
可由以上等式5描述。
[0228]
在第九增益电路175i从第五计算电路170e接收到第五输出信号s
out_5
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第九校正增益a9传输到第九增益电路175i。
[0229]
可根据在传感器105与致动器115之间的第五距离确定第九校正增益a9,该第九校正增益可以是预先确定的。第五距离可沿y轴的方向,并且可根据传感器105相对于致动器115的第五相对位置确定。第五相对位置可分别根据传感器105的y轴坐标ys和致动器115的x轴坐标ya确定。由于第九校正增益a9根据传感器105相对于致动器115的第五相对位置确定,因此可确定第九校正增益a9,而不管旋转中心位于何处。
[0230]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第九校正增益a9可与第五距离成比例。
[0231]
还应当理解,第九校正增益a9可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0232]
生成驱动信号s
dr
还可包括经由第九增益电路175i将第九校正增益a9施加到第五输出信号s
out_5
(1425a)。在第九校正增益a9被施加到第五输出信号s
out_5
之后,所得的第五校正输出信号s
out_corr_5
可被传输到第十增益电路175j,其中第十校正增益a
10
可被施加到第五校正输出信号s
out_corr_5
。
[0233]
在一些实施方案中,第十校正增益a
10
可等于第二校正增益a2。在其他实施方案中,第十校正增益a
10
可不等于第二校正增益a2。
[0234]
在第十校正增益a
10
被施加到第五校正输出信号s
out_corr_5
之后,所得的放大的第五校正输出信号s
out_corr_5
可被传输到另一个电路部件(诸如第四加法电路179b)以进行进一步处理。
[0235]
当系统100执行步骤1420a至1425a时,系统100可同时地执行步骤1420b至1425b。另选地,系统100可在步骤1420b至1425b之前或之后执行步骤1420a至1425a。生成驱动信号s
dr
还可包括根据第四相位校正信号s
pc_4
生成第六输出信号s
out_6
。此时,第六计算电路170f可计算第四相位校正信号s
pc_4
的一阶导数(1420b)。然后,第六计算电路170f可将第四相位校正信号s
pc_4
的计算出的一阶导数以第六输出信号s
out_6
的形式传输到第十一增益电路175k以进行进一步处理。在一个示例性实施方案中,第六输出信号s
out_6
可由以上等式6描述。在第十一增益电路175k从第六计算电路170f接收到第六输出信号s
out_6
之后,生成驱动信号s
dr
还可包括存储在存储器(未示出)中和/或将第十一校正增益a
11
传输到第十一增益电路175k。
[0236]
可根据在传感器105与致动器115之间的第六距离确定第十一校正增益a
11
,该第十一校正增益可以是预先确定的。第六距离可沿x轴的方向,并且可根据传感器105相对于致动器115的第六相对位置确定。第六相对位置可分别根据传感器105的x轴坐标xs和致动器115的x轴坐标xa确定。由于第十一校正增益a
11
根据传感器105相对于致动器115的第六相对位置确定,因此可确定第十一校正增益a
11
,而不管旋转中心位于何处。
[0237]
应当理解,为了校正在由干扰信号128施加到传感器105的速度和/或加速度的量值与最终地施加到致动器115的速度和/或加速度的量值之间的不匹配,第十一校正增益a
11
可与第六距离成比例。
[0238]
还应当理解,第十一校正增益a
11
可取决于系统100中使用的传感器105的类型、与施加到系统100的角速度信号和加速度信号相关联的灵敏度值以及传感器105和致动器115在衬底上的布局。
[0239]
生成驱动信号s
dr
还可包括经由第十一增益电路175k将第十一校正增益a
11
施加到第六输出信号s
out_6
(1425b)。在第十一校正增益a
11
被施加到第六输出信号s
out_6
之后,所得的第六校正输出信号s
out_corr_6
可被传输到第十二增益电路175l,其中第十二校正增益a
12
可被施加到第六校正输出信号s
out_corr_6
。
[0240]
在一些实施方案中,第十二校正增益a
12
可等于第二校正增益a2。在其他实施方案中,第十二校正增益a
12
可不等于第二校正增益a2。
[0241]
在第十二校正增益a
12
被施加到第六输出信号s
out_corr_6
之后,所得的放大的第六校正输出信号s
out_corr_6
可被传输到另一个电路部件(诸如第四加法电路179b)以进行进一步处理。
[0242]
此时,可经由第四加法电路179b使放大的第五校正输出信号s
out_corr_5
和放大的第
六校正输出信号s
out_corr_6
彼此相加(1430)。然后,第四加法电路179b可将所得的和以第二z旋转校正输出信号s
zrc_out_2
的形式传输到第三加法电路182b,其中第二z旋转校正输出信号s
zrc_out_2
可在以第二求和信号s
sum_2
的形式传输到第二惯性力消除电路190b之前加入到第四校正输出信号s
out_corr_4
以及加速度信号s
acc
的y分量(1135)。
[0243]
在完成第二z旋转校正过程之后,可由系统100执行编程循环的另一次迭代(1440)。
[0244]
在第一惯性力消除电路190a从第一加法电路182a接收到第一求和信号s
sum_1
之后,其可根据第一求和信号s
sum_1
生成第一惯性力校正信号s
ifc_out_1
。然后,第一惯性力消除电路190a可将第一惯性力校正信号s
ifc_out_1
传输到第五加法电路184a以进行附加的处理。
[0245]
类似地,在第二惯性力消除电路190b从第一加法电路182a接收到第二求和信号s
sum_2
之后,其可根据第二求和信号s
sum_2
生成第二惯性力校正信号s
ifc_out_2
。然后,第二惯性力消除电路190b可将第二惯性力校正信号s
ifc_out_2
传输到第六加法电路184b以进行附加的处理。
[0246]
在系统100正在执行y旋转向心力校正方案(即,步骤1100至1135)、第一z旋转校正方案(即,步骤1200至1240)、x旋转向心力校正方案(即,步骤1300至1335)和第二z旋转校正方案(即,步骤1400至1440)时,陀螺仪滤波器155a、155b和加速度滤波器156a、156b可分别对速度信号s
vel
和加速度信号s
acc
同时地执行各种功能,诸如积分和频率特性调整。另选地,可按顺序处理速度信号s
vel
和加速度信号s
acc
。例如,陀螺仪滤波器155a、155b和加速度滤波器156a、156b可彼此结合操作以计算透镜142的目标位置。
[0247]
陀螺仪滤波器155a、155b可利用速度信号s
vel
的x分量和y分量中的一者生成其相应陀螺仪滤波器输出信号s
gf_out_1
、s
gf_out_2
。陀螺仪滤波器155a、155b可将速度信号s
vel
的各种角速度分量转换为相应抖动角。每个角速度分量可与速度信号s
vel
的x分量和y分量中的一者相关联,并且每个抖动角可与一个角速度分量相关联。然后,陀螺仪滤波器155a、155b和加速度滤波器156a、156b可根据相应抖动角确定透镜142在每个方向上的目标位置。
[0248]
例如,就y轴而言,陀螺仪滤波器155a可计算围绕x轴的角速度的积分以生成其相应抖动角。然后,陀螺仪滤波器155a可根据计算出的抖动角确定透镜142在y轴方向上的目标位置。然后,陀螺仪滤波器155a可将以第一陀螺仪滤波器输出信号s
gf_out_1
的形式的目标位置传输到致动器控制电路120的另一个部分诸如第一线性校正电路157a以用于附加的处理。
[0249]
加速度滤波器156a、156b可利用加速度信号s
acc
的x分量和y分量中的一者生成其相应加速度滤波器输出信号s
af_out_1
、s
af_out_2
。例如,加速度滤波器156a、156b可同时地执行加速度信号s
acc
的x分量和y分量的双重积分以生成透镜142的位置信号。另选地,可按顺序对加速度信号s
acc
的x分量和y分量进行积分。加速度滤波器156a、156b可使用位置信号来计算与目标参考位置的偏差。然后,加速度滤波器156a、156b可将每个计算出的偏差以加速度滤波器输出信号s
af_out_1
、s
af_out_2
的形式分别传输到致动器控制电路120的另一个部分和/或子电路(诸如陀螺仪滤波器155a、155b)以进行进一步处理。
[0250]
然后,陀螺仪滤波器155a、155b可将其相应陀螺仪滤波器输出信号s
gf_out_1
、s
gf_out_2
传输到线性校正电路157a、157b以进行进一步处理。
[0251]
在从第一陀螺仪滤波器155a接收到第一陀螺仪滤波器输出信号s
gf_out_1
时,第一线
性校正电路157a可在将放大的信号以第一线性校正输出信号s
lc_out_1
的形式传输到第五加法电路184a之前将增益施加到第一陀螺仪滤波器输出信号s
gf_out_1
,其中该增益可被加入到第一惯性力校正信号s
ifc_out_1
。然后,第五加法电路184a可将所得的和以第一驱动信号s
dr_1
的形式传输到第一驱动器电路181a。
[0252]
类似地,在从第二陀螺仪滤波器155b接收到第二陀螺仪滤波器输出信号s
gf_out_2
时,第二线性校正电路157b可在将放大的信号以第二线性校正输出信号s
lc_out_2
的形式传输到第六加法电路184b之前将增益施加到第二陀螺仪滤波器输出信号s
gf_out_2
,其中该增益可被加入到第二惯性力校正信号s
ifc_out_2
。然后,第六加法电路184b可将所得的和以第二驱动信号s
dr_2
的形式传输到第二驱动器电路181b。
[0253]
然后,驱动信号s
dr_1
、s
dr_2
可分别经由驱动器电路180a、180传输到致动器115。一旦致动器115接收到驱动信号s
dr_1
、s
dr_2
,就可将每个驱动信号s
dr_1
、s
dr_2
转换为对应驱动力f
dr_1
、f
dr_2
。然后,可将驱动力f
dr_1
、f
dr_2
施加到透镜142。
[0254]
在上述描述中,已结合具体示例性实施方案描述了所述技术。所示和所述特定具体实施方式用于展示所述技术及其最佳模式,而不旨在以任何方式另外限制本技术的范围。实际上,为简洁起见,方法和系统的常规制造、连接、制备和其他功能方面可能未详细描述。此外,多张图中示出的连接线旨在表示各种元件之间的示例性功能关系和/或步骤。在实际系统中可能存在多个替代的或另外的功能关系或物理连接。
[0255]
已结合具体示例性实施方案描述了所述技术。然而,可在不脱离本技术的范围的情况下作出各种修改和变化。以示例性而非限制性方式考虑说明和附图,并且所有此类修改旨在包括在本技术的范围内。因此,应通过所述的一般实施方案及其在法律意义上的等同形式,而不是仅通过上述具体示例确定所述技术的范围。例如,除非另外明确说明,否则可以任何顺序执行任何方法或工艺实施方案中列举的步骤,并且不限于具体示例中提供的明确顺序。另外,任何装置实施方案中列举的部件和/或元件可以多种排列组装或者以其他方式进行操作配置,以产生与本技术基本上相同的结果,因此不限于具体示例中阐述的具体配置。
[0256]
上文已经针对具体实施方案描述了有益效果、其它优点和问题解决方案。然而,任何有益效果、优点、问题解决方案或者可使任何具体有益效果、优点或解决方案出现或变得更明显的任何要素都不应被解释为关键、所需或必要特征或组成部分。
[0257]
术语“包含”、“包括”或其任何变型形式旨在提及非排它性的包括,使得包括一系列要素的过程、方法、制品、组合物或装置不仅仅包括这些列举的要素,而且还可包括未明确列出的或此类过程、方法、制品、组合物或装置固有的其它要素。除了未具体引用的那些,本技术的实施所用的上述结构、布置、应用、比例、元件、材料或部件的其它组合和/或修改可在不脱离其一般原理的情况下变化或以其它方式特别适于具体环境、制造规范、设计参数或其它操作要求。
[0258]
上文已结合示例性实施方案描述了本技术。然而,可在不脱离本技术的范围的情况下对示例性实施方案作出改变和修改。这些和其他改变或修改旨在包括在本技术的范围内,如以下权利要求书所述。
[0259]
根据第一方面,适于与传感器通信并且能够控制致动器的控制电路包括:输入端子,该输入端子被配置为接收输入信号,其中输入信号包括x分量、y分量和z分量;第一电
路,该第一电路连接到输入端子并且被配置为:接收y分量并且根据该y分量生成第一校正信号;接收z分量并且根据该z分量生成第二校正信号和第三校正信号;以及根据第一校正信号、第二校正信号和第三校正信号生成第一驱动信号;以及;第二电路,该第二电路连接到输入端子并且被配置为:接收x分量并且根据该x分量生成第四校正信号;接收z分量并且根据该z分量生成第五校正信号和第六校正信号;以及根据第四校正信号、第五校正信号和第六校正信号生成第二驱动信号。
[0260]
在一个实施方案中,第一电路包括:第一子电路,该第一子电路被配置为:计算y分量的平方;以及根据y分量的平方和第一校正增益生成第一校正信号;第二子电路,该第二子电路被配置为:计算z分量的平方;以及计算z分量的导数;以及进行以下操作:根据z分量的平方和第二校正增益生成第二校正信号;以及根据z分量的导数和第三校正增益生成第三校正信号;以及第三子电路,该第三子电路连接到第一子电路和第二子电路并且被配置为:接收第一校正信号、第二校正信号和第三校正信号;计算第一校正信号、第二校正信号和第三校正信号的第一和;以及根据第一和生成第一驱动信号。
[0261]
在一个实施方案中,第二电路包括:第四子电路,该第四子电路被配置为:计算x分量的平方;以及根据x分量的平方和第四校正增益生成第四校正信号;第五子电路,该第五子电路被配置为:根据z分量的平方和第五校正增益生成第五校正信号;以及根据z分量的导数和第六校正增益生成第六校正信号;以及第六子电路,该第六子电路连接到第四子电路和第五子电路并且被配置为:接收第四校正信号、第五校正信号和第六校正信号;计算第四校正信号、第五校正信号和第六校正信号的第二和;以及根据第二和生成第二驱动信号。
[0262]
在一个实施方案中,第一驱动信号等于第一和,并且其中第二驱动信号等于第二和。
[0263]
在一个实施方案中,每个校正增益是预先确定的,并且其中:第一校正增益根据在传感器与致动器之间的第一距离确定,其中第一距离沿x轴方向;第二校正增益根据在传感器与致动器之间的第二距离确定,其中第二距离沿x轴方向;第三校正增益根据在传感器与致动器之间的第三距离确定,其中第三距离沿y轴方向;第四校正增益根据在传感器与致动器之间的第四距离确定,其中第四距离沿y轴方向;第五校正增益根据在传感器与致动器之间的第五距离确定,其中第五距离沿y轴方向;并且第六校正增益根据在传感器与致动器之间的第六距离确定,其中第六距离沿x轴方向。
[0264]
在一个实施方案中,第一校正增益与第一距离成比例,其中第一距离根据传感器相对于致动器的第一相对位置确定;第二校正增益与第二距离成比例,其中第二距离根据传感器相对于致动器的第二相对位置确定;第三校正增益与第三距离成比例,其中第三距离根据传感器相对于致动器的第三相对位置确定;第四校正增益与第四距离成比例,其中第四距离根据传感器相对于致动器的第四相对位置确定;第五校正增益与第五距离成比例,其中第五距离根据传感器相对于致动器的第五相对位置确定;并且第六校正增益与第六距离成比例,其中第六距离根据传感器相对于致动器的第六相对位置确定。
[0265]
根据第二方面,用于根据传感器驱动致动器的方法包括:从传感器接收包括x分量、y分量和z分量的输入信号;进行以下操作:根据y分量生成第一校正信号;根据z分量生成第二校正信号和第三校正信号;根据x分量生成第四校正信号;以及根据z分量生成第五校正信号和第六校正信号;以及进行以下操作:根据第一校正信号、第二校正信号和第三校
正信号生成第一驱动信号;以及根据第四校正信号、第五校正信号和第六校正信号生成第二驱动信号。
[0266]
在一个实施方案中,生成第一校正信号包括:计算y分量的平方;以及将第一校正增益施加到y分量的平方;生成第二校正信号包括:计算z分量的平方;以及将第二校正增益施加到z分量的平方;生成第三校正信号包括:计算z分量的导数;以及将第三校正增益施加到z分量的导数;生成第四校正信号包括:计算x分量的平方;以及将第四校正增益施加到x分量的平方;生成第五校正信号包括:将第五校正增益施加到z分量的平方;并且生成第六校正信号包括:将第六校正增益施加到z分量的导数。
[0267]
在一个实施方案中,生成第一校正信号还包括将第七校正增益施加到y分量的平方;生成第二校正信号还包括将第八校正增益施加到z分量的平方;生成第三校正信号还包括将第九校正增益施加到z分量的导数;生成第四校正信号还包括将第十校正增益施加到x分量的平方;生成第五校正信号还包括将第十一校正增益施加到z分量的平方;并且生成第六校正信号还包括将第十二校正增益施加到z分量的导数。
[0268]
在一个实施方案中,每个校正增益是预先确定的,并且其中:第一校正增益根据在传感器与致动器之间的第一距离确定,其中第一距离沿x轴方向;第二校正增益根据在传感器与致动器之间的第二距离确定,其中第二距离沿x轴方向;第三校正增益根据在传感器与致动器之间的第三距离确定,其中第三距离沿y轴方向;第四校正增益根据在传感器与致动器之间的第四距离确定,其中第四距离沿y轴方向;第五校正增益根据在传感器与致动器之间的第五距离确定,其中第五距离沿y轴方向;并且第六校正增益根据在传感器与致动器之间的第六距离确定,其中第六距离沿x轴方向。
[0269]
在一个实施方案中,第一校正增益与第一距离成比例,其中第一距离根据传感器相对于致动器的第一相对位置确定;第二校正增益与第二距离成比例,其中第二距离根据传感器相对于致动器的第二相对位置确定;第三校正增益与第三距离成比例,其中第三距离根据传感器相对于致动器的第三相对位置确定;第四校正增益与第四距离成比例,其中第四距离根据传感器相对于致动器的第四相对位置确定;第五校正增益与第五距离成比例,其中第五距离根据传感器相对于致动器的第五相对位置确定;并且第六校正增益与第六距离成比例,其中第六距离根据传感器相对于致动器的第六相对位置确定。
[0270]
在一个实施方案中,生成第一驱动信号包括计算第一校正信号、第二校正信号和第三校正信号的第一和;并且生成第二驱动信号包括计算第四校正信号、第五校正信号和第六校正信号的第二和。
[0271]
在一个实施方案中,第一驱动信号等于第一和,并且其中第二驱动信号等于第二和。
[0272]
根据第三方面,系统包括:传感器,该传感器被配置为生成包括x分量、y分量和z分量的输入信号;致动器,该致动器响应于第一驱动信号和第二驱动信号;控制电路,该控制电路与传感器通信并且能够控制致动器,该控制电路包括:输入端子,该输入端子被配置为接收输入信号;第一电路,该第一电路连接到输入端子并且被配置为:接收y分量并且根据该y分量生成第一校正信号;接收z分量并且根据该z分量生成第二校正信号和第三校正信号;以及根据第一校正信号、第二校正信号和第三校正信号生成第一驱动信号;以及第二电路,该第二电路连接到输入端子并且被配置为:接收x分量并且根据该x分量生成第四校正
信号;接收z分量并且根据该z分量生成第五校正信号和第六校正信号;以及根据第四校正信号、第五校正信号和第六校正信号生成第二驱动信号。
[0273]
在一个实施方案中,传感器包括陀螺仪传感器或加速度传感器中的至少一者。
[0274]
在一个实施方案中,第一电路被进一步配置为:计算y分量的平方;计算z分量的平方;以及计算z分量的导数;进行以下操作:根据y分量的平方和第一校正增益生成第一校正信号;根据z分量的平方和第二校正增益生成第二校正信号;以及根据z分量的导数和第三校正增益生成第三校正信号;计算第一校正信号、第二校正信号和第三校正信号的第一和;以及根据第一和生成第一驱动信号。
[0275]
在一个实施方案中,第二电路被进一步配置为:计算x分量的平方;进行以下操作:根据x分量的平方和第四校正增益生成第四校正信号;根据z分量的平方和第五校正增益生成第五校正信号;以及根据z分量的导数和第六校正增益生成第六校正信号;计算第四校正信号、第五校正信号和第六校正信号的第二和;以及根据第二和生成第二驱动信号。
[0276]
在一个实施方案中,第一驱动信号等于第一和,并且其中第二驱动信号等于第二和。
[0277]
在一个实施方案中,每个校正增益是预先确定的,并且其中:第一校正增益根据在传感器与致动器之间的第一距离确定,其中第一距离沿x轴方向;第二校正增益根据在传感器与致动器之间的第二距离确定,其中第二距离沿x轴方向;第三校正增益根据在传感器与致动器之间的第三距离确定,其中第三距离沿y轴方向;第四校正增益根据在传感器与致动器之间的第四距离确定,其中第四距离沿y轴方向;第五校正增益根据在传感器与致动器之间的第五距离确定,其中第五距离沿y轴方向;并且第六校正增益根据在传感器与致动器之间的第六距离确定,其中第六距离沿x轴方向。
[0278]
在一个实施方案中,第一校正增益与第一距离成比例,其中第一距离根据传感器相对于致动器的第一相对位置确定;第二校正增益与第二距离成比例,其中第二距离根据传感器相对于致动器的第二相对位置确定;第三校正增益与第三距离成比例,其中第三距离根据传感器相对于致动器的第三相对位置确定;第四校正增益与第四距离成比例,其中第四距离根据传感器相对于致动器的第四相对位置确定;第五校正增益与第五距离成比例,其中第五距离根据传感器相对于致动器的第五相对位置确定;并且第六校正增益与第六距离成比例,其中第六距离根据传感器相对于致动器的第六相对位置确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1