一种定位方法、装置、电子设备及存储介质与流程
本技术实施例涉及通信领域,尤其涉及一种定位方法、装置、电子设备及存储介质。
背景技术:
1、随着互联网技术高速发展,定位技术在人们日常生活各方面的应用需求与日俱进。国内外学者就定位技术已展开了大量的研究,其中不少研究成果也已获得了广泛的应用。目前,主流的定位技术主要包括无线网络通信技术(wifi)、蓝牙定位技术、行人航位推算(pdr,pedestrian dead reckoning)、红外线定位技术、超声波定位技术、射频识别(rfid,radio frequency identification)定位技术、紫峰协议(zigbee)定位技术、超宽带定位技术、基于计算机视觉、图像、磁场以及信标定位技术等。现有技术中,一般只使用上述定位技术中的一种定位技术进行对待定位对象的定位,或者直接将利用多种定位技术得到的多个定位结果通过算法进行直接融合对待定位对象的定位结果,未考虑不同定位方式在不同精度下对待定位对象的定位结果的影响,最终得到的待定位对象的定位结果的准确度较低。
技术实现思路
1、为解决上述技术问题,本技术实施例提供了一种定位方法、装置、电子设备及存储介质。
2、本技术实施例提供的一种定位方法,包括:
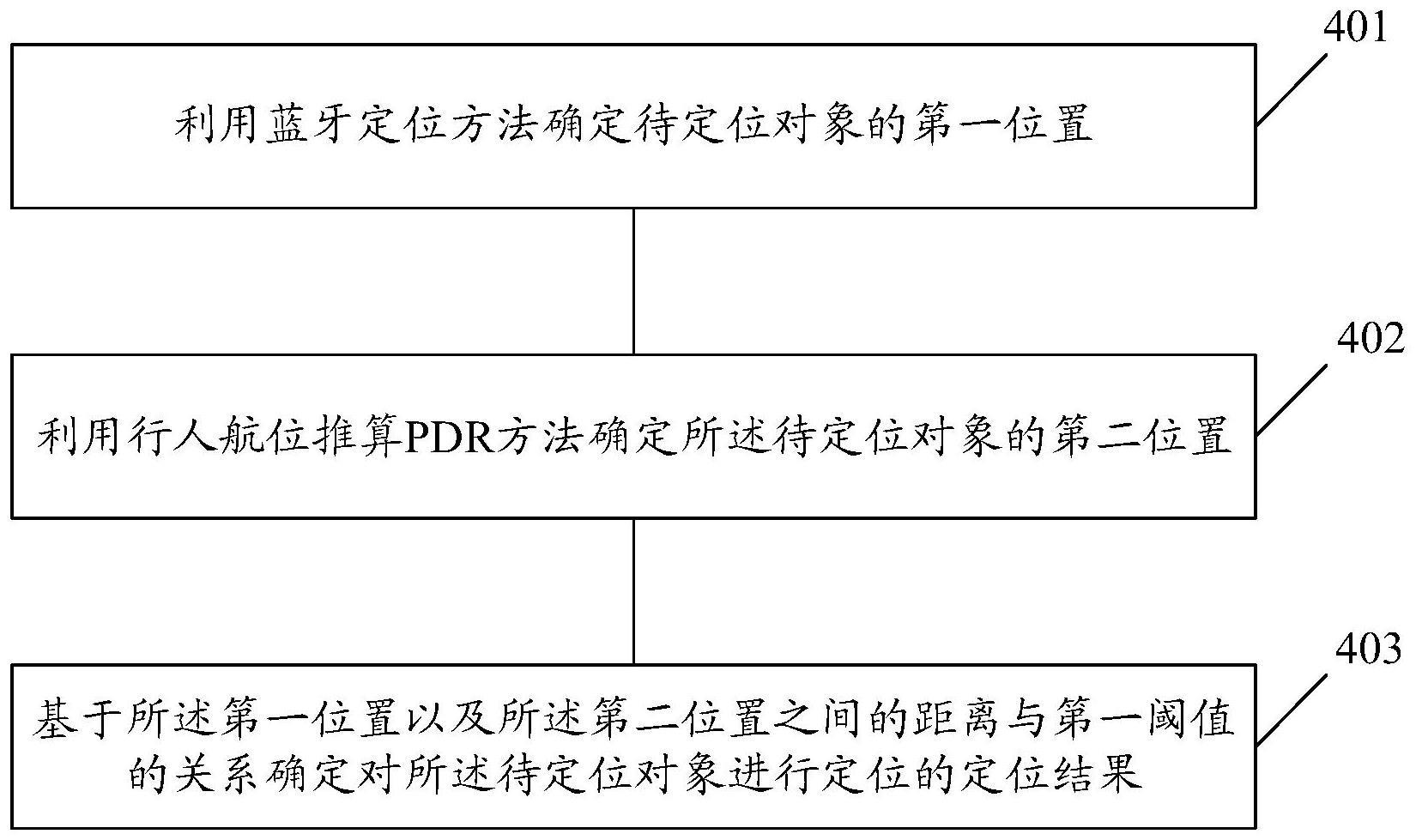
3、利用蓝牙定位方法确定待定位对象的第一位置;
4、利用行人航位推算pdr方法确定所述待定位对象的第二位置;
5、基于所述第一位置以及所述第二位置之间的距离与第一阈值的关系确定对所述待定位对象进行定位的定位结果;其中,所述定位结果为所述第一位置或所述第二位置之一。
6、本技术一可选实施方式中,所述利用蓝牙定位方法确定待定位对象的第一位置,包括:
7、获得待定位对象采集到的多个定位对象的多组信号强度值;基于所述多组信号强度值确定所述待定位对象的多个第三位置,并基于所述多个第三位置确定所述待定位对象的第四位置;
8、确定信号强度分布的指纹数据集以及所述待定位对象的周边区域的信号强度分布情况;基于所述指纹数据集以及所述信号强度分布情况利用k近邻算法确定所述待定位对象的第五位置;其中,所述指纹数据集是通过在所述待定位对象的周边区域内按照设定间距采集多个位置的信号强度值得到的;所述指纹数据集包括采集的所述多个位置的位置信息以及所述多个位置中的各位置对应的信号强度值;
9、按照预设规则,基于所述第四位置和第五位置确定第一位置;其中,所述第一位置为以下位置之一:所述第四位置、所述第五位置、所述第四位置和所述第五位置加权后的加权位置。
10、本技术一可选实施方式中,所述基于所述多组信号强度值确定所述待定位对象的多个第三位置,并基于所述多个第三位置确定所述待定位对象的第四位置,包括:
11、将所述多组信号强度值分为至少两组;基于所述至少两组信号强度值中的各组信号强度值确定与各组信号强度值对应的待定位对象的第三位置;
12、基于所述各组信号强度值对应的加权系数将与各组信号强度值对应的第三位置进行加权,得到所述待定位对象的第四位置。
13、本技术一可选实施方式中,所述基于所述至少两组信号强度值中的各组信号强度值确定与各组信号强度值对应的待定位对象的第三位置,包括:
14、针对所述至少两组信号强度值中的每组信号强度值,基于该组信号强度值确定与该组信号强度值中的各信号强度值对应的距离信息;
15、利用最小二乘法,基于该组信号强度值对应的多组位置信息以及对应的所述距离信息确定与该组信号强度值对应的所述待定位对象的第三位置。
16、本技术一可选实施方式中,所述基于所述指纹数据集以及所述信号强度分布情况利用k近邻算法确定所述待定位对象的第五位置,包括:
17、确定距离度量值;根据所述距离度量值,在所述指纹数据集中确定出与所述信号强度分布情况近邻的k个点,并确定涵盖所述k个点的所述信号强度分布情况的邻域;
18、根据分类决策规则基于所述邻域确定所述待定位对象的第五位置。
19、本技术一可选实施方式中,所述按照预设规则,基于所述第四位置和第五位置确定第一位置,包括:
20、确定距离度量值的第二阈值和第三阈值;其中,所述第二阈值小于所述第三阈值;
21、在所述距离度量值小于所述第二阈值的情况下,将所述第五位置确定为所述第一位置;
22、在所述距离度量值大于等于所述第二阈值且小于等于所述第三阈值的情况下,将所述第四位置和所述第五位置的加权距离值确定为所述第一位置;
23、在所述距离度量值大于所述第三阈值的情况下,将所述第四位置确定为所述第一位置。
24、本技术一可选实施方式中,所述方法还包括:
25、对所述第一位置进行滤波处理,将滤波处理后的第一位置作为所述待定位对象的第一位置。
26、本技术一可选实施方式中,所述利用行人航位推算pdr方法确定所述待定位对象的第二位置,包括:
27、利用所述待定位对象的检测装置检测所述待定位对象的加速度数据和方向数据;
28、基于所述加速度数据确定所述待定位对象的第一运动数据;所述第一运动数据包括:运动状态、运动距离;
29、基于所述方向数据确定所述待定位对象的第二运动数据;所述第二运动数据包括:运动方向;
30、基于所述第一运动数据以及所述第二运动数据确定所述待定位对象的第二位置。
31、本技术一可选实施方式中,所述基于所述加速度数据确定所述待定位对象的第一运动数据,包括:
32、确定与所述待定位对象相关的加速度阈值信息;所述加速度阈值信息包括:加速度波峰阈值、加速度波谷阈值、加速度波峰之间的时间差阈值以及所述加速度波峰与波谷之间的时间差阈值;
33、基于所述加速度阈值信息对所述加速度数据进行过滤,并基于过滤后的所述加速度数据以及所述加速度阈值信息确定所述待定位对象的运动状态;所述运动状态包括以下之一:静止状态、行走状态、快走状态、跑步状态。
34、本技术一可选实施方式中,所述基于所述加速度数据确定所述待定位对象的第一运动数据,还包括:
35、基于所述待定位对象在一个步伐周期内的加速度的波峰值和波谷值确定所述待定位对象的运动距离;所述运动距离代表所述待定位对象的运动步长。
36、本技术一可选实施方式中,所述基于所述方向数据确定所述待定位对象的第二运动数据,包括:
37、基于所述方向数据确定所述待定位对象的正前方与正北方向的夹角;
38、基于所述夹角确定所述待定位对象的运动方向。
39、本技术一可选实施方式中,所述加速度数据包括所述待定位对象在三维空间的三个方向的加速度数据;所述基于所述加速度数据确定所述待定位对象的第一运动数据,包括:
40、基于所述待定位对象在三维空间的三个方向的加速度数据确定所述待定位对象的综合加速度,基于所述综合加速度确定所述待定位对象的第一运动数据。
41、本技术一可选实施方式中,所述基于所述第一位置以及所述第二位置之间的距离与第一阈值的关系确定对所述待定位对象进行定位的定位结果,包括:
42、在确定所述距离大于所述第一阈值的情况下,将所述第一位置确定为对所述待定位对象进行定位的定位结果;
43、在所述距离小于等于所述第一阈值的情况下,将所述第二位置确定为对所述待定位对象进行定位的定位结果。
44、本技术实施例还提供了一种定位装置,所述装置包括:
45、第一确定单元,用于利用蓝牙定位方法确定待定位对象的第一位置;
46、第二确定单元,用于利用行人航位推算pdr方法确定所述待定位对象的第二位置;
47、第三确定单元,用于基于所述第一位置以及所述第二位置之间的距离与第一阈值的关系确定对所述待定位对象进行定位的定位结果;其中,所述定位结果为所述第一位置或所述第二位置之一。
48、本技术一可选实施方式中,所述第一确定单元,具体用于:
49、获得待定位对象采集到的多个定位对象的多组信号强度值;基于所述多组信号强度值确定所述待定位对象的多个第三位置,并基于所述多个第三位置确定所述待定位对象的第四位置;
50、确定信号强度分布的指纹数据集以及所述待定位对象的周边区域的信号强度分布情况;基于所述指纹数据集以及所述信号强度分布情况利用k近邻算法确定所述待定位对象的第五位置;其中,所述指纹数据集是通过在所述待定位对象的周边区域内按照设定间距采集多个位置的信号强度值得到的;所述指纹数据集包括采集的所述多个位置的位置信息以及所述多个位置中的各位置对应的信号强度值;
51、按照预设规则,基于所述第四位置和第五位置确定第一位置;其中,所述第一位置为以下位置之一:所述第四位置、所述第五位置、所述第四位置和所述第五位置加权后的加权位置。
52、本技术一可选实施方式中,所述第一确定单元,具体用于:
53、将所述多组信号强度值分为至少两组;基于所述至少两组信号强度值中的各组信号强度值确定与各组信号强度值对应的待定位对象的第三位置;
54、基于所述各组信号强度值对应的加权系数将与各组信号强度值对应的第三位置进行加权,得到所述待定位对象的第四位置。
55、本技术一可选实施方式中,所述第一确定单元,具体用于:
56、针对所述至少两组信号强度值中的每组信号强度值,基于该组信号强度值确定与该组信号强度值中的各信号强度值对应的距离信息;
57、利用最小二乘法,基于该组信号强度值对应的多组位置信息以及对应的所述距离信息确定与该组信号强度值对应的所述待定位对象的第三位置。
58、本技术一可选实施方式中,所述第一确定单元,具体用于:
59、确定距离度量值;根据所述距离度量值,在所述指纹数据集中确定出与所述信号强度分布情况近邻的k个点,并确定涵盖所述k个点的所述信号强度分布情况的邻域;
60、根据分类决策规则基于所述邻域确定所述待定位对象的第五位置。
61、本技术一可选实施方式中,所述第一确定单元,具体用于:
62、确定距离度量值的第二阈值和第三阈值;其中,所述第二阈值小于所述第三阈值;
63、在所述距离度量值小于所述第二阈值的情况下,将所述第五位置确定为所述第一位置;
64、在所述距离度量值大于等于所述第二阈值且小于等于所述第三阈值的情况下,将所述第四位置和所述第五位置的加权距离值确定为所述第一位置;
65、在所述距离度量值大于所述第三阈值的情况下,将所述第四位置确定为所述第一位置。
66、本技术一可选实施方式中,所述装置还包括:
67、过滤单元,用于对所述第一位置进行滤波处理,将滤波处理后的第一位置作为所述待定位对象的第一位置。
68、本技术一可选实施方式中,所述第二确定单元,具体用于:
69、利用所述待定位对象的检测装置检测所述待定位对象的加速度数据和方向数据;
70、基于所述加速度数据确定所述待定位对象的第一运动数据;所述第一运动数据包括:运动状态、运动距离;
71、基于所述方向数据确定所述待定位对象的第二运动数据;所述第二运动数据包括:运动方向;
72、基于所述第一运动数据以及所述第二运动数据确定所述待定位对象的第二位置。
73、本技术一可选实施方式中,所述第二确定单元,具体用于:
74、确定与所述待定位对象相关的加速度阈值信息;所述加速度阈值信息包括:加速度波峰阈值、加速度波谷阈值、加速度波峰之间的时间差阈值以及所述加速度波峰与波谷之间的时间差阈值;
75、基于所述加速度阈值信息对所述加速度数据进行过滤,并基于过滤后的所述加速度数据以及所述加速度阈值信息确定所述待定位对象的运动状态;所述运动状态包括以下之一:静止状态、行走状态、快走状态、跑步状态。
76、本技术一可选实施方式中,所述第二确定单元,具体用于:
77、基于所述待定位对象在一个步伐周期内的加速度的波峰值和波谷值确定所述待定位对象的运动距离;所述运动距离代表所述待定位对象的运动步长。
78、本技术一可选实施方式中,所述第二确定单元,具体用于:
79、基于所述方向数据确定所述待定位对象的正前方与正北方向的夹角;
80、基于所述夹角确定所述待定位对象的运动方向。
81、本技术一可选实施方式中,所述加速度数据包括所述待定位对象在三维空间的三个方向的加速度数据;所述第二确定单元,具体用于:
82、基于所述待定位对象在三维空间的三个方向的加速度数据确定所述待定位对象的综合加速度,基于所述综合加速度确定所述待定位对象的第一运动数据。
83、本技术一可选实施方式中,所述第三确定单元,具体用于:
84、在确定所述距离大于所述第一阈值的情况下,将所述第一位置确定为对所述待定位对象进行定位的定位结果;
85、在所述距离小于等于所述第一阈值的情况下,将所述第二位置确定为对所述待定位对象进行定位的定位结果。
86、本技术实施例还提供了一种电子设备,所述电子设备包括:存储器和处理器,所述存储器上存储有计算机可执行指令,所述处理器运行所述存储器上的计算机可执行指令时可实现上述实施例所述的方法。
87、本技术实施例还提供了一种计算机存储介质,其特征在于,所述存储介质上存储有可执行指令,该可执行指令被处理器执行时实现上述实施例所述的方法。
88、本技术实施例的技术方案,通过利用蓝牙定位方法确定待定位对象的第一位置;利用行人航位推算pdr方法确定所述待定位对象的第二位置;基于所述第一位置以及所述第二位置之间的距离与第一阈值的关系确定对所述待定位对象进行定位的定位结果;其中,所述定位结果为所述第一位置或所述第二位置之一。如此,能够结合蓝牙定位方法和pdr定位方法两种定位方法进行定位结果的互相校准,实现对待定位对象的准确定位。
- 还没有人留言评论。精彩留言会获得点赞!