一种帧捕获同步方法及装置与流程
1.本发明属于ofdm通信技术领域,具体涉及一种帧捕获同步方法及装置。
背景技术:
2.正交频分复用(orthogonal frequency-division multiplex,ofdm)已被广泛应用于许多高比特率的通信系统中。由于ofdm系统对同步误差非常敏感,精准的定时同步将会极大影响系统性能,必须为ofdm系统设计可靠的同步方案。
3.ofdm系统的同步研究由来已久,并且已经提出许多同步方法。在各种基于训练序列的定时同步算法中,滑动自相关是最常用的方法。这种方法通过寻找具有良好设计结构的前导序列的滑动自相关的峰值点来获得帧的起始点。最具有代表性的是schmidl&cox算法,许多后续的研究都是基于该算法进行的。然而schmidl&cox算法得到的同步效果并不好,其同步相关值存在一个平顶,这使得定时同步估计存在偏差和不确定性。minn算法消除了schmidl&cox算法的平顶效应,使得同步自相关峰值变得尖锐,提高了定时同步估计的精度和可靠性,但该自相关峰值还不够尖锐,并且主峰两边出现了很多旁瓣,在信道环境恶劣的情况下,如低信噪比条件下,定时同步估计将受到较大的影响。park算法进一步解决了minn算法存在的不足,既消除了schmidl&cox算法的平顶效应,同时得到了比minn算法更为尖锐的自相关峰,提高了定时的精度和确定性,但是在噪声干扰较大的情况下,该算法还是会出现较大的定时同步估计误差,其同步估计的稳定性依然较差。与park算法类似,ren算法的相关度量值也呈脉冲状,但ren算法的旁瓣相对要小得多。然而,ren算法对snr要求较高,当snr下降时,ren算法性能会急剧恶化。
4.综上,现有的同步方法在噪声干扰比较大,信噪比较低的情况下,同步性能较差。
技术实现要素:
5.本发明提供了一种帧捕获同步方法及装置,用以解决现有技术中同步方法在噪声干扰比较大,信噪比较低的情况下,同步性能较差的问题。
6.为解决上述技术问题,本发明提供了一种帧捕获同步方法,包括:
7.1)获取接收信号及其第一功率值,并计算接收信号与本地的短训练域序列的互相关值,根据互相关值、第一功率值得到帧边界位置,其中,接收信号的短训练域序列中包括扰码层;
8.2)从所述帧边界位置开始,计算接收信号的时域自相关值和第二功率值;
9.3)根据时域自相关值和第二功率值在第二预设搜索窗中进行峰值判决,并在第二预设搜索窗中对满足峰值判决条件的接收信号进行峰值搜索,找出峰值判决中判决值最大值,所述判决值为时域相关值与第二功率值的比值,最大值对应的位置为同步点位置,从而判定同步成功。
10.上述技术方案的有益效果为:利用接收信号的短训练域序列与本地短训练域序列计算互相关值,并结合接收信号的第一功率值判断帧到来,然后进行对接收信号进行自相
关处理和峰值判决,以得到判决值最大值,从而判定同步。由于短训练域序列的相关性好,抗频偏能力强,发送功率高,能够使得接收机采用较短的时间进行同步检测,从而有效降低了接收机功耗、提高了同步性能。基于本方案的增加了扰码层的自相关方法,可获得非常尖锐的相关主峰,并能高效抑制峰值旁瓣,根据自相关后的处理结果能够准确地判定同步是否成功,因此同步性能比较高。
11.进一步地,为了更好地获取自相关值,本发明提供了一种帧捕获同步方法,还包括在步骤2)中,时域自相关值为:
[0012][0013]
式中c2(n)为时域自相关值,w为滑动窗口数,m为滑动窗口索引,scrm(i)为stf扰码层序列,i为stf扰码层序列索引,ri表示第i个滑动窗口中的接收信号,表示ri的共轭转置,n为接收信号的采样点的序号。
[0014]
进一步地,为了提高同步性能,本发明提供了一种帧捕获同步方法,还包括在步骤1)中,扰码层是由1、-1构成的预设长度的序列。
[0015]
进一步地,为了更好地基于功率值和自相关值进行判定,本发明提供了一种帧捕获同步方法,还包括在步骤3)中,峰值判决的公式为:
[0016]
c2(n)≥e2(n)
·
t2[0017]
式中e2(n)为第二功率值,t2为预设阈值。
[0018]
进一步地,为了更好地进行同步判定,本发明提供了一种帧捕获同步方法,还包括第二预设搜索窗的长度为3n
fft
,n
fft
为相应的ofdm模式下的fft点数。
[0019]
进一步地,为了更好地判定帧到达,本发明提供了一种帧捕获同步方法,在步骤1)中帧边界位置确定过程包括:根据互相关值、第一功率值和预设门限值进行峰值判决,对满足峰值判决条件的接收信号在第一预设搜索窗中进行峰值旁瓣搜索,将峰值搜索结果与预设的帧到达判决条件相比较,如果峰值搜索结果满足预设的帧到达判决条件,则判定帧到达,输出帧边界位置。
[0020]
进一步地,为了更准确地获得帧边界位置,本发明提供了一种帧捕获同步方法,还包括预设的帧到达判决条件为:当前峰值计数达到预期值且相邻两个峰值位置间隔均为短训练域序列中重复图样的点数。
[0021]
进一步地,为了更好地获得峰值的相关信息,本发明提供了一种帧捕获同步方法,峰值旁瓣搜索的步骤包括:若当前点检测到的是第一个峰值,则记录当前峰值位置,并记录峰值计数为1;若当前点检测到的不是第一个峰值,则将当前峰值点的位置与前一个峰值点的位置相比较,若两者距离不大于第一预设搜索窗长度,如果当前峰值大于前一个峰值,那么将当前峰值点的峰值位置,覆盖前一次记录的峰值点峰值位置,峰值计数保持不变;若两者距离等于滑动窗长度,则记录当前峰值点峰值位置,同时峰值计数累加1。
[0022]
进一步地,为了更全面地获得同步结果,本发明提供了一种帧捕获同步方法,还包括如果第二预设搜索窗内未找到满足峰值判决条件的接收信号,则判定同步失败。
[0023]
本发明还提供了一种帧捕获同步装置,包括存储器和处理器,所述处理器用于执行存储在所述存储器中的指令,以实现上述的帧捕获同步方法。
附图说明
[0024]
图1是物理信号帧结构图;
[0025]
图2是stf基础层帧格式;
[0026]
图3是stf帧格式;
[0027]
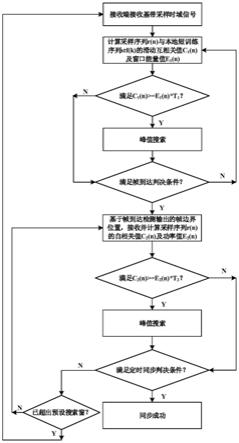
图4是本发明的帧捕获同步方法的流程示意图;
[0028]
图5是本发明的帧捕获同步装置组成结构示意图;
[0029]
图6是本发明的帧捕获同步装置帧检测模块组成结构示意图;
[0030]
图7是本发明的帧捕获同步装置定时同步模块组成结构示意图。
具体实施方式
[0031]
为了使本发明的目的、技术方案及技术效果更加清楚明了,以下结合附图及具体实施例对本发明进行进一步详细说明。
[0032]
帧捕获同步方法实施例:
[0033]
图1是物理信号帧结构图,图2是stf基础层帧格式,图3是stf帧格式,图4是本发明的帧捕获同步方法的流程示意图。本实施例的帧捕获同步方法的具体流程如下:
[0034]
步骤一:获取接收信号及其第一功率值,并计算接收信号与本地的短训练域序列的互相关值。
[0035]
在步骤一中,接收信号为基带采样时域信号。基带采样时域信号采用图1所示的高速无线hrf物理帧格式。如图1所示,ppdu(physical layer protocol data unit,物理层协议数据单元)由前导、sig(phr control signal,phr控制字)、phr(physical header,物理帧头)和psdu(phy service data unit,物理层服务数据单元)组成。其中,前导分为短训练域(stf)和长训练域(ltf)两部分,均为周期序列。ppdu信号有3种ofdm模式,分别为option1对应1mhz,option2对应500khz,option3对应200khz。stf由基础层和扰码层两层序列通过点乘得到。每个ofdm模式的stf序列不同。时域stf的基础层序列由国网双模通信协议规范中定义的相应stf频域序列进行ifft变换得到:
[0036][0037]
其中对于option1、option2和option3,n取值分别为n=128、64和32。stf基础层时域帧格式示意图如图2所示。
[0038]
在步骤一中,基带采样时域信号中包括短训练域序列,短训练域序列中包括扰码层,扰码层不分ofdm模式,扰码层是由1、-1构成的预设长度的序列。例如扰码层由长度为10的序列构成,扰码序列为[-1,-1,-1,-1,1,1,-1,-1,-1,1]。各ofdm模式基础层和扰码层点乘后示意图如图3所示。在这种情况下,短训练域序列(short training field,stf)具有良好的相关性,并在时域上具有特殊的重复结构,另外由于短训练域序列中包括扰码层,能够便于后续步骤中通过高效的自相关方法,实现精准的帧定时同步。
[0039]
具体地,如图4所示,在接收侧,接收基带采样时域信号,随基带采样时域信号的每个采样点的输入取n
p
点得到采样序列r(n),计算采样序列r(n)与本地stf时域序列stf(k)的滑动互相关值c1(n)和滑动窗中采样序列r(n)的功率值e1(n)(即第一功率值),其中n
p
为滑动窗长(即滑动窗的大小),其取值为stf基础层帧重复图样的点数,n为接收信号的采样
点序号,n=0,1,2,...,k为stf时域序列的序号(即索引),0<k<n
p
。在这种情况下,利用stf时域序列的重复结构,能够实现简单高效的帧到达检测。
[0040]
其中采样序列r(n)与本地stf时域序列stf(k)的滑动互相关值c1(n)的计算公式如下:
[0041][0042]
滑动窗中采样序列r(n)的功率值e1(n)(即窗口能量值)的计算公式如下:
[0043][0044]
式中,p为滑动窗口数,考虑到处理时延及良好的降噪效果,可取为p=4,p为滑动窗口索引,n
p
为滑动窗的大小,其取值为stf基础层帧重复图样的点数,即n
p
=16,n为接收信号的采样点的序号,k为滑动窗内stf时域序列的索引,0<k<n
p
,stf
*
(k)为stf(k)的共轭,|
·
|2=i2+q2,i和q分别为相应复数值的实部和虚部。
[0045]
步骤二:根据互相关值、第一功率值和预设门限值进行峰值判决,对满足峰值判决条件的接收信号在第一预设搜索窗中进行峰值旁瓣搜索。
[0046]
具体地,在步骤二中,峰值判决采用如下计算公式:
[0047]
c1(n)≥e1(n)
·
t1[0048]
式中,c1(n)为互相关值、e1(n)为功率值、t1为预设门限值。t1可由仿真确定,例如t1=0.2。
[0049]
在步骤二中,第一预设搜索窗长度设为l
s1
,峰值旁瓣搜索的步骤包括:
[0050]
对满足峰值判决条件的各点进行搜索,若当前点为检测到第一个峰值点(即满足峰值判决的第一个点),则记录当前峰值位置记录峰值计数为1;若已经存在有效峰(即当前点检测到的不是第一个峰值),则将当前峰值点的位置与所存储的前一个峰值点的位置相比较,当两者距离不大于第一预设搜索窗长度l
s1
时,如果当前峰值大于前一个峰值,那么将当前峰值点峰值位置覆盖前一次记录的峰值点的互相关值c1、功率值e1及峰值位置,峰值计数保持不变;当两者距离刚好等于滑动窗长n
p
时,则记录当前峰值点的位置,同时峰值计数累加1,其中l
s1
=n
p
/2+1,n
p
取值为stf基础层帧重复图样的点数,即n
p
=16,此时l
s1
=9。
[0051]
步骤三:将峰值搜索结果与预设的帧到达判决条件相比较,如果峰值搜索结果满足预设的帧到达判决条件,则判定帧到达,输出帧边界位置。
[0052]
在步骤三中,预设的帧到达判决条件为:当前峰值计数达到预期值n
peak
且所存储的相邻两个峰值位置间隔均为stf基础层帧重复图样的点数n
p
,若满足预设的帧到达判决条件,则进入步骤四中进行同步判定,若不满足,则返回步骤一重复进行帧到达的检测过程。预期值n
peak
可取值为2或3。
[0053]
步骤四:从所述帧边界位置开始,计算接收信号的时域自相关值和第二功率值。
[0054]
在步骤四中,从步骤三指示的帧边界位置开始,继续接收采样序列r(n),计算采样序列r(n)的时域自相关值c2(n)和功率值e2(n),时域自相关值c2(n)采用如下计算公式:
[0055][0056][0057]
式中c2(n)为时域自相关值,w为滑动窗口数,可取w=7,m为滑动窗口索引,scrm(i)为stf扰码层序列,i为stf扰码层序列索引,规范中定义的扰码层序列是长度为10的序列:[-1,-1,-1,-1,1,1,-1,-1,-1,1],在实际系统当中,可保留stf起始部分的数据用于进行agc的调整,避免由于agc调整过程中的信号波形失真引起丢包,因此,可取scrm[8]=[-1,-1,1,1,-1,-1,-1,1]。ri表示以第n个采样点为起始点的第i个滑动窗口中的接收信号,即ri=[r(n+i*l),...,r(n+(i+1)*l-1)]
t
,n=0,1,2,...,l为滑动窗长,取值为l=n
fft
/2,n
fft
为相应ofdm模式下的fft点数,l为滑动窗中的采样序列索引,l=0,1,2...,l-1。表示ri的共轭转置,n为接收信号的采样点的序号。
[0058]
功率值e2(n)(即第二功率值)采用如下计算公式:
[0059][0060][0061]
其中|
·
|2=i2+q2。i和q分别为相应复数值的实部和虚部。
[0062]
步骤五:根据时域自相关值和第二功率值在第二预设搜索窗中进行峰值判决,在第二预设搜索窗中对满足峰值判决条件的接收信号进行峰值搜索。
[0063]
在步骤五中,峰值判决的公式为:
[0064]
c2(n)≥e2(n)
·
t2[0065]
其中,c2(n)为时域自相关值,e2(n)为第二功率值,t2为预设阈值,其为预设门限值,t2可由仿真确定,例如t2=0.215。
[0066]
在步骤五中,第二预设搜索窗为l
s2
,为了更好地进行同步判定,可将第二预设搜索窗长度设置为3n
fft
,n
fft
为相应的ofdm模式下的fft点数。其中搜索窗长3*n
fft
是根据系统仿真折中选取的一个搜索长度值。由此,能够避免搜索窗长过短时导致的误判,以及搜索窗长过长时导致的同步时延过大的问题。
[0067]
步骤六:找出满足峰值判决中判决值最大值,最大值对应的位置为同步点位置,从而判定同步成功。
[0068]
具体地,在步骤六中,如图4所示,将峰值搜索结果与预设的定时同步判决条件进行比较,如果满足预设的定时同步判决条件,则判定定时同步成功,若不满足预设的定时同步判决条件(即如果预设搜索窗内未找到满足峰值判决条件的接收信号),判定定时同步失败。其中预设的定时同步判决过程为:在第二预设搜索窗l
s2
范围内找出满足峰值判决条件的判决值的最大值,判决值为时域相关值与第二功率值的比值,其对应的位置即为同步点位置,根据同步点位置可计算出有用的数据起始位置,此时判定同步成功,如果超出第二预设搜索窗l
s2
范围仍未找到满足峰值判决条件的判决值,则判定同步失败。
[0069]
基于本实施例的帧捕获同步方法,利用接收信号的短训练域序列与本地短训练域
序列计算互相关值,并结合接收信号的第一功率值判断帧到来,然后进行对接收信号进行自相关处理和峰值判决,以得到判决值最大值,从而判定同步。由于短训练域序列的相关性好,抗频偏能力强,发送功率高,能够使得接收机采用较短的时间进行同步检测,有效降低了接收机的功耗、提高了同步性能。基于本方案的增加了扰码层的自相关方法,可获得非常尖锐的相关主峰,并能高效抑制峰值旁瓣,根据自相关后的处理结果能够准确地判定同步是否成功,因此同步性能比较高。解决了现有技术中同步方法在噪声干扰比较大,信噪比较低的情况下,同步性能较差的问题。另外本实施例的帧捕获同步方法通过利用短训练(stf)符号的重复结构和加扰特性,能够在加性高斯白噪声和频率选择性信道连续或突发帧条件下,实现准确的帧定时同步,具有同步精度高,鲁棒性好,硬件资源复用率高和功耗低的特点,在基于ofdm的微功率无线通信系统中具有很高的应用价值。本实施例的帧捕获同步方法是适用于ofdm系统的高效的帧捕获同步方法,解决了现有技术在低信噪比情况下,定时同步估计偏差大,精度低,稳定性差,门限随信号衰减变化及峰值旁瓣超出门限,导致虚警率高的问题。
[0070]
帧捕获同步系统实施例:
[0071]
图5是本发明的帧捕获同步装置组成结构示意图;图6是本发明的帧捕获同步装置帧检测模块组成结构示意图;图7是本发明的帧捕获同步装置定时同步模块组成结构示意图。本实施例公开一种帧捕获同步系统,用于实现方法实施例的帧捕获同步方法,帧捕获同步系统包括帧检测模块和定时同步模块,帧检测模块包含相关检测子模块、峰值搜索子模块一和帧到达判决子模块。定时同步模块包含自相关子模块、峰值搜索子模块二和定时同步判决子模块。
[0072]
相关检测子模块用于计算采样序列与本地存储stf序列的滑动互相关值c1(n)和滑动窗口中采样序列的能量值e1(n)。
[0073]
峰值搜索子模块一用于根据相关检测子模块处理结果c1(n)及e1(n)和预设门限值t1进行峰值判决及峰值旁瓣搜索。
[0074]
帧到达判决子模块用于将峰值搜索结果与预设的帧到达判决条件相比较:如果峰值搜索结果满足预设的帧到达检测判决条件,则判定帧到达,输出帧边界位置。否则将重复进行帧到达检测过程。
[0075]
自相关子模块用于计算接收采样数据的自相关值c2(n)和接收采样数据的功率值e2(n)。
[0076]
峰值搜索子模块二用于根据自相关子模块计算结果c2(n)及e2(n)和预设门限值t2进行峰值判决及峰值旁瓣搜索。
[0077]
定时同步判决子模块用于将峰值搜索结果与预设的定时同步判决条件相比较:在搜索窗l
s2
范围内,找出满足峰值判决条件的判决值的最大值,其对应的位置即为同步点位置,根据同步点位置可计算出有用的数据起始位置,此时判定同步成功,如果超出搜索窗l
s2
范围仍未找到满足峰值判决条件的判决值,则判定同步失败。
[0078]
在本实施例中,帧捕获同步系统的各模块的实现方式以经在上述的方法实施例中进行了详细介绍,对于本领域的技术人员,可以根据该帧捕获同步方法,以获得帧捕获同步系统,此处不再赘述。
[0079]
基于本实施例的帧捕获同步系统能够解决现有技术中同步方法在噪声比较大的
情况下,同步性能较差的问题。
[0080]
帧捕获同步装置实施例:
[0081]
本实施例公开一种帧捕获同步装置。基于本实施例的帧捕获同步装置能够解决现有技术中同步方法在噪声比较大的情况下,同步性能较差的问题。
[0082]
在本实施例中,帧捕获同步装置包括处理器和存储器。处理器用于执行存储在存储器中的指令,以实现本发明的方法实施例中的帧捕获同步方法。该帧捕获同步方法已经在上述的方法实施例中进行了详细介绍,对于本领域的技术人员,可以根据该帧捕获同步方法,生成相应的计算机指令,以获得帧捕获同步装置,此处不再赘述。存储器用于存储根据帧捕获同步方法生成的计算机指令。
[0083]
在本实施例中,处理器可以为微处理器mcu、可编程逻辑器件fpga等处理装置。
[0084]
在本实施例中,存储器可以为利用电能方式存储信息的各式存储器(例如ram、rom等)、利用磁能方式存储信息的各式存储器(例如硬盘、软盘、磁带、磁芯存储器、磁泡存储器、u盘等)、利用光学方式存储信息的各式存储器(例如cd、dvd等)。当然,存储器还可以为其他方式的存储器(例如量子存储器、石墨烯存储器等)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1