一种低轨卫通终端指向精度标定方法及系统与流程
1.本发明涉及指向精度标定技术领域,具体涉及一种低轨卫通终端指向精度标定方法及系统。
背景技术:
2.随着低轨卫星互联网的发展,低轨卫通终端逐渐出现并普及。低轨卫通终端具有开环跟踪的特点,需要根据低轨卫星的轨道数据和低轨卫通终端的定位定向信息实时调转波束对准低轨卫星。目前尚不存在低轨卫星通信系统中低轨卫通终端的指向精度标定方法。
3.现有高轨卫通系统中的同步轨道卫星相对于地球基本静止,高轨卫通终端主要采用定仰角搜索和信号跟踪方式实现对星跟踪,不适用于跟踪相对地球快速移动的低轨卫星,高轨卫通终端的指向精度标定方法也不能实现低轨卫通终端的指向精度标定。
4.与高轨卫星相比,低轨卫星具有对地快速移动的特点,需要卫通终端具备星历跟踪和精确指向能力,实时调转波束对准低轨卫星。现存及在研的低轨卫通终端,其类型和数量较少,也尚未形成统一、规范的指向精度标定方法。而目前较成熟的高轨卫通终端多采用定仰角扫描和信号跟踪方案,其采用的指向精度标定方法对精确指向能力的要求也相对较低,不能适应低轨卫通终端指向精度标定的需求。
技术实现要素:
5.(一)要解决的技术问题
6.本发明的目的在于提供一种低轨卫通终端指向精度标定方法及系统,以解决高轨卫通终端指向精度标定方法不能实现对低轨卫通终端的指向精度标定的技术问题。
7.(二)技术方案
8.本发明提供了一种低轨卫通终端指向精度标定方法,包括以下步骤:
9.确定低轨卫通终端的静态波束指向精度;
10.确定所述低轨卫通终端的动态波束指向维持精度;
11.确定所述低轨卫通终端的静态模拟星历跟踪精度;
12.依据所述静态波束指向精度、所述动态波束指向维持精度及所述静态模拟星历跟踪精度,合成低轨卫通终端指向精度。
13.进一步地,所述确定低轨卫通终端的静态波束指向精度,具体包括如下步骤:
14.将所述低轨卫通终端置于选定的n个典型静止姿态,并依次测定每个典型静止状态下的所述低轨卫通终端的地理位置;
15.将所述低轨卫通终端开环指向特定的同步卫星或已测定地理位置的高塔信号源,并记录低轨卫通终端执行角对应的第一朝向矢量;
16.调整所述低轨卫通终端的波束指向,并记录信号幅度最高时所述低轨卫通终端执行角对应的第二朝向矢量;
17.确定每个典型静止状态下对应的所述第一朝向矢量与所述第二朝向矢量之间的第一误差角;
18.依据每个典型静止状态下的对应的第一误差角及所述典型静止姿态的数量,确定所述静态波束指向精度。
19.进一步地,所述确定所述低轨卫通终端的动态波束指向维持精度,具体包括如下步骤:
20.将所述低轨卫通终端安装在摇摆台上,并将所述摇摆台置于零位,设定所述低轨卫通终端的波束指向选定的地理坐标系的第三朝向矢量;
21.依据设定摇摆参数启动摇摆台,在摇摆过程中选定m个采样点,并依次在每个采样点下同步记录所述摇摆台和低轨卫通终端执行角对应的地理坐标系的第四朝向矢量;
22.确定每个采样点下对应的所述第三朝向矢量与所述第四朝向矢量之间的第二误差角;
23.依据所述第二误差角及所述采样点的数量,确定所述动态波束指向维持精度。
24.进一步地,所述确定所述低轨卫通终端的静态模拟星历跟踪精度,具体包括如下步骤:
25.将所述低轨卫通终端置于静止状态,注入低轨卫星的轨道参数并启动跟踪;
26.在跟踪过程中选定l个采样点,并依次在每个采样点下同步记录所述低轨卫星的地理坐标系第五朝向矢量、低轨卫通终端执行角对应的地理坐标系的第六朝向矢量;
27.确定每个采样点下对应的所述第五朝向矢量与所述第六朝向矢量之间的第三误差角;
28.依据所述第三误差角及所述采样点的数量,确定所述静态模拟星历跟踪精度。
29.进一步地,所述依据所述静态波束指向精度、所述动态波束指向维持精度及所述静态模拟星历跟踪精度,合成低轨卫通终端指向精度,具体为:
30.依据所述静态波束指向精度、所述动态波束指向维持精度及所述静态模拟星历跟踪精度的平方和的平方根,确定低轨卫通终端指向精度。
31.本发明还提供了一种低轨卫通终端指向精度标定系统,包括:
32.静态波束指向精度测试模块,用于确定低轨卫通终端的静态波束指向精度;
33.动态波束指向维持精度测试模块,用于确定所述低轨卫通终端的动态波束指向维持精度;
34.静态模拟星历跟踪测试模块,用于确定所述低轨卫通终端的静态模拟星历跟踪精度;
35.波束指向精度合成模块,用于依据所述低轨卫通终端的静态波束指向精度、所述动态波束指向维持精度和所述静态模拟星历跟踪精度,合成低轨卫通终端指向精度。
36.进一步地,所述静态波束指向精度测试模块,具体用于:
37.将所述低轨卫通终端置于选定的n个典型静止姿态,并依次测定每个典型静止状态下的所述低轨卫通终端的地理位置;
38.将所述低轨卫通终端开环指向特定的同步卫星或已测定地理位置的高塔信号源,并记录低轨卫通终端执行角对应的第一朝向矢量;
39.调整所述低轨卫通终端的波束指向,并记录信号幅度最高时所述低轨卫通终端执
行角对应的第二朝向矢量;
40.确定每个典型静止状态下对应的所述第一朝向矢量与所述第二朝向矢量之间的第一误差角;
41.依据每个典型静止状态下的对应的第一误差角及所述典型静止姿态的数量,确定所述静态波束指向精度。
42.进一步地,所述动态波束指向维持精度测试模块,具体用于:
43.将所述低轨卫通终端安装在摇摆台上,并将所述摇摆台置于零位,设定所述低轨卫通终端的波束指向选定的地理坐标系的第三朝向矢量;
44.依据设定摇摆参数启动摇摆台,在摇摆过程中选定m个采样点,并依次在每个采样点下同步记录所述摇摆台和低轨卫通终端执行角对应的地理坐标系的第四朝向矢量;
45.确定每个采样点下对应的所述第三朝向矢量与所述第四朝向矢量之间的第二误差角;
46.依据所述第二误差角及所述采样点的数量,确定所述动态波束指向维持精度。
47.进一步地,所述静态模拟星历跟踪测试模块,具体用于:
48.将所述低轨卫通终端置于静止状态,注入低轨卫星的轨道参数并启动跟踪;
49.在跟踪过程中选定l个采样点,并依次在每个采样点下同步记录所述低轨卫星的地理坐标系第五朝向矢量、低轨卫通终端执行角对应的地理坐标系的第六朝向矢量;
50.确定每个采样点下对应的所述第五朝向矢量与所述第六朝向矢量之间的第三误差角;
51.依据所述第三误差角及所述采样点的数量,确定所述静态模拟星历跟踪精度。
52.本发明还提供了一种电子设备,包括处理器和与所述处理器电连接的存储器,所述存储器用于存储计算机程序,所述处理器用于调用所述计算机程序以执行上述方法中的步骤。
53.本发明还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序能够被处理器调用,以执行上述方法中的步骤。
54.(三)有益效果
55.相比于现有技术,本发明具有以下优点:
56.本发明提供的低轨卫通终端指向精度标定方法,在低轨卫通终端的设计中将指向精度指标分解为波束精确指向、动态扰动隔离及星历跟踪等三个典型子指标,以实现高精度跟踪低轨卫星的功能。对应的指向精度标定方法采用静态波束指向精度、动态波束指向维持精度及静态模拟星历跟踪等三个独立的测试环节,分别获取相应的典型子指标,再合成得到低轨卫通终端的指向精度指标,最终实现对低轨卫通终端的指向精度标定。
附图说明
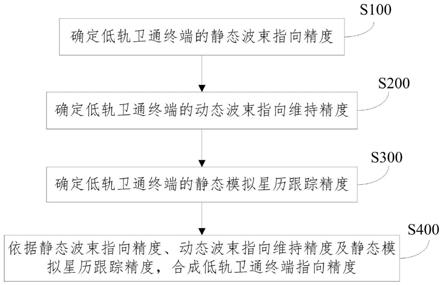
57.图1是本发明实施例提供的一种低轨卫通终端指向精度标定方法的流程示意图;
58.图2是本发明实施例提供的一种低轨卫通终端指向精度标定系统的结构示意图。
59.图中:
60.100-静态波束指向精度测试模块;200-动态波束指向维持精度测试模块;300-静态模拟星历跟踪测试模块;400-波束指向精度合成模块。
具体实施方式
61.以下结合附图对本发明的具体实施方式做出详细说明,根据下面说明和权利要求书,本发明的优点和特征将更清楚。需要说明的是,附图均采用非常简化的形式且均适用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
62.需要说明的是,为了清楚地说明本发明的内容,本发明特举多个实施例以进一步阐释本发明的不同实现方式,其中,该多个实施例是列举式而非穷举式。此外,为了说明的简洁,前实施例中已提及的内容往往在后实施例中予以省略,因此,后实施例中未提及的内容可相应参考前实施例。
63.图1是本发明实施例提供的一种低轨卫通终端指向精度标定方法的流程示意图,该方法可以包括以下步骤:
64.s100、确定低轨卫通终端的静态波束指向精度;
65.s200、确定低轨卫通终端的动态波束指向维持精度;
66.s300、确定低轨卫通终端的静态模拟星历跟踪精度;
67.s400、依据静态波束指向精度、动态波束指向维持精度及静态模拟星历跟踪精度,合成低轨卫通终端指向精度。
68.上述实施方式中,在低轨卫通终端的设计中将指向精度指标分解为波束精确指向、动态扰动隔离及星历跟踪等三个典型子指标,以实现高精度跟踪低轨卫星的功能。对应的指向精度标定方法采用静态波束指向精度、动态波束指向维持精度及静态模拟星历跟踪等三个独立的测试环节,分别获取相应的典型子指标,再合成得到低轨卫通终端的指向精度指标,最终实现对低轨卫通终端的指向精度标定。
69.在一些可选的实施方式中,步骤s100中,确定低轨卫通终端的静态波束指向精度,具体包括如下步骤:
70.s101、将低轨卫通终端置于选定的n个典型静止姿态,并依次测定每个典型静止状态下的低轨卫通终端的地理位置;
71.s102、将低轨卫通终端开环指向特定的同步卫星或已测定地理位置的高塔信号源,并记录低轨卫通终端执行角对应的第一朝向矢量;
72.s103、调整低轨卫通终端的波束指向,并记录信号幅度最高时低轨卫通终端执行角对应的第二朝向矢量;
73.s104、确定每个典型静止状态下对应的第一朝向矢量与第二朝向矢量之间的第一误差角;
74.s105、依据每个典型静止状态下的对应的第一误差角及典型静止姿态的数量,确定静态波束指向精度。
75.具体地,将低轨卫通终端置于n个选定的典型静止姿态。在第i个姿态下,首先测定低轨卫通终端的地理位置;然后将低轨卫通终端开环指向特定的同步卫星或已测定地理位置的高塔信号源,记录低轨卫通终端执行角对应的朝向矢量再手动调整低轨卫通终端的波束指向,记录信号幅度最高时低轨卫通终端执行角对应的朝向矢量
76.获取朝向矢量和之间的误差角δi:
[0077][0078]
其中,
·
表示矢量内积,||表示矢量取模。
[0079]
获取静态波束指向精度σ
static
:
[0080][0081]
在一些可选的实施方式中,步骤s200中,确定低轨卫通终端的动态波束指向维持精度,具体包括如下步骤:
[0082]
s201、将低轨卫通终端安装在摇摆台上,并将摇摆台置于零位,设定低轨卫通终端的波束指向选定的地理坐标系的第三朝向矢量;
[0083]
s202、依据设定摇摆参数启动摇摆台,在摇摆过程中选定m个采样点,并依次在每个采样点下同步记录摇摆台和低轨卫通终端执行角对应的地理坐标系的第四朝向矢量;
[0084]
s203、确定每个采样点下对应的第三朝向矢量与第四朝向矢量之间的第二误差角;
[0085]
s204、依据第二误差角及采样点的数量,确定动态波束指向维持精度。
[0086]
具体地,将低轨卫通终端安装在摇摆台上。首先将摇摆台置于零位,设定低轨卫通终端的波束指向选定的地理坐标系朝向矢量然后按设定摇摆参数并启动摇摆台,在摇摆过程中选定m个采样点,在第j个采样点,同步记录摇摆台和低轨卫通终端执行角对应的地理坐标系朝向矢量
[0087]
获取朝向矢量和之间的误差角εj:
[0088][0089]
其中,
·
表示矢量内积,||表示矢量取模。
[0090]
获取动态波束指向维持精度σ
dynamic
:
[0091][0092]
在一些可选的实施方式中,步骤s300中,确定低轨卫通终端的静态模拟星历跟踪精度,具体包括如下步骤:
[0093]
s301、将低轨卫通终端置于静止状态,注入低轨卫星的轨道参数并启动跟踪;
[0094]
s302、在跟踪过程中选定l个采样点,并依次在每个采样点下同步记录低轨卫星的地理坐标系第五朝向矢量、低轨卫通终端执行角对应的地理坐标系的第六朝向矢量;
[0095]
s303、确定每个采样点下对应的第五朝向矢量与第六朝向矢量之间的第三误差
角;
[0096]
s304、依据第三误差角及采样点的数量,确定静态模拟星历跟踪精度。
[0097]
具体地,将低轨卫通终端置于静止姿态。注入低轨卫星的轨道参数并启动跟踪,在跟踪过程中选定l个采样点,在第k个采样点,同步记录低轨卫星的地理坐标系朝向矢量和低轨卫通终端执行角对应的地理坐标系朝向矢量
[0098]
获取朝向矢量和之间的误差角ξk:
[0099][0100]
其中,
·
表示矢量内积,||表示矢量取模。
[0101]
获取静态模拟星历跟踪精度σ
ephtrack
:
[0102][0103]
在一些可选的实施方式中,步骤s400中,依据静态波束指向精度、动态波束指向维持精度及静态模拟星历跟踪精度,合成低轨卫通终端指向精度,具体为:
[0104]
依据静态波束指向精度、动态波束指向维持精度及静态模拟星历跟踪精度的平方和的平方根,确定低轨卫通终端指向精度。
[0105]
在上述实施方式中,根据低轨卫通终端的静态波束指向精度σ
static
、动态波束指向维持精度σ
dynamic
和静态模拟星历跟踪精度σ
ephtrack
,获取低轨卫通终端指向精度σ:
[0106][0107]
通过上述公式,能够获得低轨卫通终端的指向精度。
[0108]
图2是本发明实施例提供的一种低轨卫通终端指向精度标定系统的结构示意图,该系统可以包括:
[0109]
静态波束指向精度测试模块100,用于确定低轨卫通终端的静态波束指向精度;
[0110]
动态波束指向维持精度测试模块200,用于确定低轨卫通终端的动态波束指向维持精度;
[0111]
静态模拟星历跟踪测试模块300,用于确定低轨卫通终端的静态模拟星历跟踪精度;
[0112]
波束指向精度合成模块400,用于依据低轨卫通终端的静态波束指向精度、动态波束指向维持精度和静态模拟星历跟踪精度,合成低轨卫通终端指向精度。
[0113]
在一些可选的实施方式中,静态波束指向精度测试模块100,具体用于:
[0114]
将低轨卫通终端置于选定的n个典型静止姿态,并依次测定每个典型静止状态下的低轨卫通终端的地理位置;
[0115]
将低轨卫通终端开环指向特定的同步卫星或已测定地理位置的高塔信号源,并记录低轨卫通终端执行角对应的第一朝向矢量;
[0116]
调整低轨卫通终端的波束指向,并记录信号幅度最高时低轨卫通终端执行角对应
的第二朝向矢量;
[0117]
确定每个典型静止状态下对应的第一朝向矢量与第二朝向矢量之间的第一误差角;
[0118]
依据每个典型静止状态下的对应的第一误差角及典型静止姿态的数量,确定静态波束指向精度。
[0119]
在一些可选的实施方式中,动态波束指向维持精度测试模块200具体用于:
[0120]
将低轨卫通终端安装在摇摆台上,并将摇摆台置于零位,设定低轨卫通终端的波束指向选定的地理坐标系的第三朝向矢量;
[0121]
依据设定摇摆参数启动摇摆台,在摇摆过程中选定m个采样点,并依次在每个采样点下同步记录摇摆台和低轨卫通终端执行角对应的地理坐标系的第四朝向矢量;
[0122]
确定每个采样点下对应的第三朝向矢量与第四朝向矢量之间的第二误差角;
[0123]
依据第二误差角及采样点的数量,确定动态波束指向维持精度。
[0124]
在一些可选的实施方式中,静态模拟星历跟踪测试模块300具体用于:
[0125]
将低轨卫通终端置于静止状态,注入低轨卫星的轨道参数并启动跟踪;
[0126]
在跟踪过程中选定l个采样点,并依次在每个采样点下同步记录低轨卫星的地理坐标系第五朝向矢量、低轨卫通终端执行角对应的地理坐标系的第六朝向矢量;
[0127]
确定每个采样点下对应的第五朝向矢量与第六朝向矢量之间的第三误差角;
[0128]
依据第三误差角及采样点的数量,确定静态模拟星历跟踪精度。
[0129]
本发明实施例还提供了一种电子设备,包括处理器和与处理器电连接的存储器,存储器用于存储计算机程序,处理器用于调用计算机程序以执行上述方法中的步骤。
[0130]
本发明实施例还提供了一种计算机可读存储介质,存储有计算机程序,计算机程序能够被处理器调用,以执行上述方法中的步骤。
[0131]
虽然该发明可以以多种形式的修改和替换来扩展,说明书中也列出了一些具体的实施图例并进行详细阐述。应当理解的是,发明者的出发点不是将该发明限于所阐述的特定实施例,正相反,发明者的出发点在于保护所有给予由本权利声明定义的精神或范围内进行的改进、等效替换和修改。同样的元器件号码可能被用于所有附图以代表相同的或类似的部分。
[0132]
本发明未详细描述内容为本领域技术人员公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1