一种太阳能抄表机器人的制作方法
1.本实用新型涉及抄表领域,尤其涉及一种太阳能抄表机器人。
背景技术:
2.水表,是测量水流量的仪表,大多是水的累计流量测量,一般分为容积式水表和速度式水表两类,水表的发展已有近二百年的历史,选择水表规格时,应先估算通常情况下所使用流量的大小和流量范围,然后选择常用流量最接近该值的那种规格的水表作为首选。
3.目前供水行业对偏远分散区域的居民用水户管理成本居高不下,甚至抄表危险的地方对抄表员人身会带来威胁;供水行业对大水量用水户的监控缺乏低成本的监控手段,由蓄电池供电的抄表机器人无法得到持续的供电,更换电池或铺设有线电源的工作会大大增加管理成本。
4.因此,有必要提供一种太阳能抄表机器人解决上述技术问题。
技术实现要素:
5.本实用新型提供一种太阳能抄表机器人,解决了供水行业对大水量用水户的监控缺乏低成本的监控手段,且管理成本增加的问题。
6.为解决上述技术问题,本实用新型提供的太阳能抄表机器人,包括:
7.机壳;
8.电池盒,所述电池盒设置于所述机壳的顶部;
9.球头连接杆,所述球头连接杆的底端设置于所述电池盒的顶部,所述球头连接杆的顶端设置有万向球头,所述万向球头上设置有光伏板;
10.水表转接环,所述水表转接环设置于所述机壳的底部,所述水表转接环内壁的顶部设置有摄像头;
11.通过摄像头对水表的表盘上行码进行拍摄,再通过网络输出数据,就可以及时进行抄表工作。
12.优选的,所述机壳的顶部设置有防护盖,所述防护盖位于所述电池盒的一侧。
13.优选的,所述光伏板的底部设置有转向框,所述转向框的内部设置有球体,所述球体的外表面通过支杆固定于所述光伏板的底部,所述转向框的底部与所述球头连接杆的顶端连接。
14.优选的,所述转向框的内表面设置有弹性挤压垫,所述弹性挤压垫的内表面设置有防滑纹。
15.优选的,所述球体的外表面设置有橡胶套。
16.优选的,所述转向框的内壁的两侧均开设有隐藏槽,两个所述隐藏槽的内壁的顶部和底部之间均滑动连接有移动板,两个所述移动板相对的一侧均固定连接有弧形夹紧块。
17.优选的,两个所述隐藏槽的内壁的一侧均螺纹连接有丝杆,两个所述丝杆的另一
端分别转动连接于两个所述移动板相离的一侧,两个所述丝杆的另一端均贯穿所述转向框并延伸至所述转向框的外部。
18.与相关技术相比较,本实用新型提供的太阳能抄表机器人具有如下有益效果:
19.本实用新型提供一种太阳能抄表机器人,通过水表转接环内部的摄像头可以对水表盘上的行码进行拍摄,再通过网络输出数据,完成抄表,而且抄表机器人通过定时器,可以进行定时拍照,可以根据所需设定拍照频率上传至抄表系统,从而达到智能化低成本的应用目的,对供水行业管网分区计量的应用,提供了低成本高效率的作用;而且通过光伏板的设置可以吸收外界的光源,并且转换为电能为机器人进行持续供电,提高使用的长久性。
附图说明
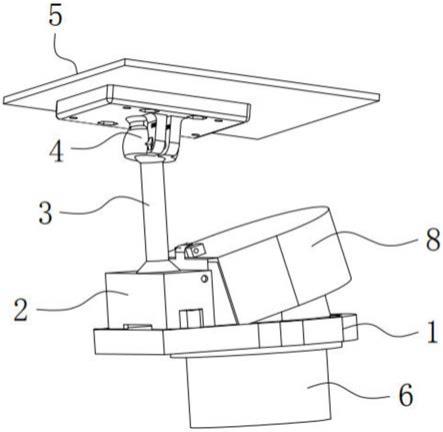
20.图1为本实用新型提供的太阳能抄表机器人的第一实施例的结构示意图;
21.图2为图1所示的水表转接环的结构仰视图;
22.图3为本实用新型提供的太阳能抄表机器人的第二实施例的结构示意图;
23.图4为图3所示的a部放大示意图。
24.图中标号:1、机壳,2、电池盒,3、球头连接杆,4、万向球头,5、光伏板,6、水表转接环,7、摄像头,8、防护盖,9、转向框,10、球体,11、弹性挤压垫,12、防滑纹,13、移动板,14、弧形夹紧块,15、丝杆,16、隐藏槽。
具体实施方式
25.下面结合附图和实施方式对本实用新型作进一步说明。
26.第一实施例
27.请结合参阅图1、图2,其中,图1为本实用新型提供的太阳能抄表机器人的第一实施例的结构示意图;图2为图1所示的水表转接环的结构仰视图。太阳能抄表机器人包括:
28.机壳1;
29.电池盒2,所述电池盒2设置于所述机壳1的顶部;
30.球头连接杆3,所述球头连接杆3的底端设置于所述电池盒2的顶部,所述球头连接杆3的顶端设置有万向球头4,所述万向球头4上设置有光伏板5;
31.水表转接环6,所述水表转接环6设置于所述机壳1的底部,所述水表转接环6内壁的顶部设置有摄像头7;
32.通过摄像头7对水表的表盘上行码进行拍摄,再通过网络输出数据,就可以及时进行抄表工作;
33.球头连接杆3的设置,用于万向球头4的连接,而且光伏板5的设置,用于吸收光能转换为电能储存在机壳1内部的蓄电池中,通过蓄电池为抄表机器人进行供电;
34.球头连接杆3和万向球头4均采用现有技术中的连接方式,用于对光伏板5进行角度的调节,提高光伏板5光照吸收的效果;
35.机壳1中设置有定时器以及无线通信模块,用于定时拍照和信息的传输;
36.抄表机器人自带定时拍照,智能识别水表行度和无线通信功能,可根据所需设定拍照频率上传至抄表系统,以达到智能化低成本的应用目的。
37.本发明对供水行业管网分区计量的应用提供了低成本高效率的应用方案。
38.所述机壳1的顶部设置有防护盖8,所述防护盖8位于所述电池盒2的一侧;
39.防护盖8的设置,用于对机壳1进行防护,而且该设备的主板以及蓄电池均设置于机壳1的内部,通过机壳1对主板进行防护,而且主板上设置有信号发射器和信号接收器,用于对拍摄的表盘信息进行传输。
40.本实用新型提供的太阳能抄表机器人的工作原理如下:
41.将机器人进行安装,并且再安装的过程中,水表转接环6罩住水表盘,水表转接环6用于匹配不同表头尺寸,通过水表转接环6内部的摄像头7可以对水表盘上的行码进行拍摄,再通过网络输出数据,完成抄表工作;
42.而且通过光伏板5可以对外界的光源进行吸收,并且转换为电能储存在蓄电池中,通过蓄电池对机器人进行持续供电。
43.与相关技术相比较,本实用新型提供的太阳能抄表机器人具有如下有益效果:
44.通过水表转接环6内部的摄像头7可以对水表盘上的行码进行拍摄,再通过网络输出数据,完成抄表,而且抄表机器人通过定时器,可以进行定时拍照,可以根据所需设定拍照频率上传至抄表系统,从而达到智能化低成本的应用目的,对供水行业管网分区计量的应用,提供了低成本高效率的作用;而且通过光伏板5的设置可以吸收外界的光源,并且转换为电能为机器人进行持续供电,提高使用的长久性。
45.第二实施例
46.请结合参阅图3
‑
4,基于本技术的第一实施例提供的太阳能抄表机器人,本技术的第二实施例提出另一种太阳能抄表机器人。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
47.具体的,本技术的第二实施例提供的太阳能抄表机器人的不同之处在于,所述光伏板5的底部设置有转向框9,所述转向框9的内部设置有球体10,所述球体10的外表面通过支杆固定于所述光伏板5的底部,所述转向框9的底部与所述球头连接杆3的顶端连接;
48.球体10滚动于转向框9的内部,通过球体10在转向框9的内部进行滚动,进而可以使光伏板5进行角度的调节,提高光伏板5光能的吸收。
49.所述转向框9的内表面设置有弹性挤压垫11,所述弹性挤压垫11的内表面设置有防滑纹12;
50.通过弹性挤压垫11的设置,用于对球体10进行挤压,增大球体10滚动的难度,进而提高了后续球体10滚动后的问题,无需对球体10进行卡紧,提高了操作的便捷性。
51.所述球体10的外表面设置有橡胶套;
52.通过橡胶套的设置,提高弹性挤压垫11与球体10接触后的摩擦性,提高球体滚动的阻性。
53.所述转向框9的内壁的两侧均开设有隐藏槽16,两个所述隐藏槽16的内壁的顶部和底部之间均滑动连接有移动板13,两个所述移动板13相对的一侧均固定连接有弧形夹紧块14;
54.通过两个弧形夹紧块14相对方向的运动,可以对处于转向框9内部的球体10进行卡紧,保证球体10的稳定性,避免大风天气,造成光伏板5随意的摆动,造成损坏,具有良好的防护功能,而且提高了使用时的稳定性。
55.两个所述隐藏槽16的内壁的一侧均螺纹连接有丝杆15,两个所述丝杆15的另一端
分别转动连接于两个所述移动板13相离的一侧,两个所述丝杆15的另一端均贯穿所述转向框9并延伸至所述转向框9的外部;
56.通过手动转动两个丝杆15,可以带动两个移动板13相对方向或相离方向运动。
57.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1