一种麦克风阵列结构及机器人的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种麦克风阵列结构及机器人。
背景技术:
2.现有的机器人通常通过可移动平台实现位移,并通过摄像器和受控机械臂实现相关的任务操作,从而实现日常巡检的任务。然而,现有的机器人对音频采集的人机交互研发投入不足,导致大多数的机器人暂时还不具备音频采集的功能,给机器人的推广和普及带来了限制。
技术实现要素:
3.基于此,本实用新型的目的在于克服现有技术的不足,提供一种麦克风阵列结构,其采用麦克风阵列布局的结构设计,声源定位精度高。
4.为了实现上述目的,本实用新型采用的技术方案为:
5.一种麦克风阵列结构,包括壳体及麦克风阵列,所述麦克风阵列包括板卡及设置在所述板卡上的多个麦克风组件,所述板卡设置于所述壳体上,所述壳体与所述多个麦克风组件相对应的位置分别设置有拾音孔。
6.作为一种实施方式,所述多个麦克风组件均包括麦克风和固定弹片,每个麦克风组件的麦克风分别通过相应的固定弹片抵靠于相对应的拾音孔上。
7.作为一种实施方式,所述麦克风的两侧分别设置有密封硅胶。
8.作为一种实施方式,所述麦克风与所述拾音孔之间设有拾音通道。
9.作为一种实施方式,所述拾音孔远离所述麦克风的一侧设置有防水透气膜。
10.作为一种实施方式,所述多个麦克风组件环绕所述壳体四周布置。
11.作为一种实施方式,所述壳体设有卡槽,所述板卡插入所述壳体的卡槽中。
12.本实用新型所述的麦克风阵列结构,采用多阵列的麦克风布局,麦克风的数量越多,声源定位精度越高;另外,通过板卡环绕设置在所述壳体的四周内侧,并利用卡槽与其卡接,使得板卡拆装方便牢固。每个麦克风的固定结合了密封硅胶和固定弹片的作用,使得麦克风的拾音气密性更优,在拾音孔上设置防水透气膜,既能起到防水的作用,又能防止积累灰尘,美观大方。
13.进一步地,本实用新型还提供一种机器人,包括机身、设置于所述机身底部的连接座、设置于所述连接座下方的底盘及如上述实施例任一项所述的麦克风阵列结构,所述麦克风阵列结构设置于所述机身的顶部。
14.作为一种实施方式,所述机身的侧面设置有多个围绕所述机身布置的摄像头,多个摄像头位于所述机身的中部。
15.本实用新型的机器人,通过在机身顶部设置的麦克风阵列结构,其采用多阵列布局的结构,麦克风的数量越多,声源定位精度越高,使得机器人的拾音效果更佳。
16.为了更好地理解和实施,下面结合附图详细说明本实用新型。
附图说明
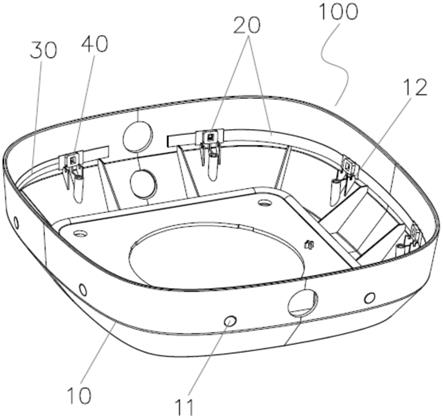
17.图1为本实用新型麦克风阵列结构的结构示意图;
18.图2为本实用新型麦克风阵列结构的另一结构示意图;
19.图3为本实用新型麦克风阵列结构的剖面示意图;
20.图4为图3所示a部的放大示意图;
21.图5为本实用新型机器人的结构示意图。
具体实施方式
22.为进一步说明各实施例,本实用新型提供有附图。这些附图为本实用新型揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域的普通技术人员应能理解其他可能得实施方式以及本实用新型的优点。
23.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解对本实用新型的限制。
24.请参阅图1至图5,图1为本实用新型麦克风阵列结构的结构示意图;图2为本实用新型麦克风阵列结构的另一结构示意图;图3为本实用新型麦克风阵列结构的剖面示意图;图4为图3所示a部的放大示意图;图5为本实用新型机器人的结构示意图。
25.如图1和图2所示,本实施例提供一种麦克风阵列20结构100,包括壳体10及麦克风阵列20,所述麦克风阵列20包括板卡30及设置在所述板卡30上的多个麦克风组件40,所述板卡30设置于所述壳体10上,所述壳体10与所述多个麦克风组件40相对应的位置分别设置有拾音孔11。
26.具体地,所述多个麦克风组件40环绕所述壳体10四周布置,在本实施例中,所述麦克风组件40均包括麦克风41和固定弹片42,每个麦克风组件40的麦克风分别通过相应的固定弹片42抵靠于相对应的拾音孔11上。
27.在一些可选的实施方式中,所述壳体10的内侧壁四周分别环绕设置有八个麦克风组件40,八个麦克风组件40分别两两作为一对设置在壳体10的四周上;在本实施例中,所述板卡30环绕设置于所述壳体10的内侧四周上,并且所述壳体10的四周设有多个卡槽12,所述板卡30插入所述壳体10的多个卡槽12中。需要说明的是,本实施例的麦克风阵列20并不限于八阵列布局的结构设计,也可采用四阵列、六阵列或其它数量的阵列布局,麦克风41的数量越多,其声源定位精度就越高。
28.另外,本实施例的板卡30采用pcb板卡或fpc板卡,利用pcb板卡或fpc板卡的软硬板特性,既能利用其软特性将板卡30环绕设置于壳体10中,又能利用硬特性插入壳体10的卡槽12固定。
29.在一些可选的实施方式中,如图3和图4所示,所述麦克风41的前后两侧分别设置有密封硅胶43,在麦克风与拾音孔11之间设有拾音通道44,并且本实施例的麦克风41通过固定弹片42抵靠固定,固定弹片42的一端设置于所述壳体10中,其另一端顶压于所述麦克
风41上,结合前后两侧的密封硅胶43和固定弹片42的作用,使得麦克风41的拾音气密性更优;另外,本实施例的拾音孔11远离麦克风41的外侧粘贴有防水透气膜45,既能起到防水的作用,又能防止积累灰尘,美观大方。
30.在一些可选的实施方式中,所述麦克风41采用数字硅麦克风。
31.与现有技术相比,本实用新型所述的麦克风阵列结构100,采用多阵列的麦克风布局,麦克风41的数量越多,声源定位精度越高;另外,通过板卡30环绕设置在所述壳体10的四周内侧,并利用卡槽12与其卡接,使得板卡30拆装方便牢固。每个麦克风41的固定结合了密封硅胶43和固定弹片42的作用,使得麦克风41的拾音气密性更优,在拾音孔11上设置防水透气膜45,既能起到防水的作用,又能防止积累灰尘,美观大方。
32.另外,如图5所示,本实施例还提供一种机器人200,包括机身50、设置于所述机身50底部的连接座60、设置于所述连接座60下方的底盘70及如上述实施例任一项所述的麦克风阵列结构100,所述麦克风阵列结构100设置于所述机身50的顶部。
33.在一些可选的实施方式中,所述机身50的侧面设置有多个围绕所述机身50布置的摄像头80,多个摄像头80位于所述机身50的中部。
34.本实施例的机器人200,通过在机身50顶部设置的麦克风阵列结构100,其采用多阵列布局的结构,麦克风41的数量越多,声源定位精度越高,使得机器人200的拾音效果更佳。
35.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型麦克风阵列结构范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1