一种多传感器自动驾驶车辆校验场地的制作方法
1.本实用新型属于自动驾驶领域,具体是一种多传感器自动驾驶车辆校验场地,用于l3级商用车的校验。
技术背景
2.现有的自动驾驶l3级商用车的校验场地都是校验单个传感器的,所能起到的校验作用比较单一,一辆多传感器商用车需要在多个场地才能完成自身传感器的校验,存在校验场地占用面积大,校验花费的时间长等缺点。
3.基于此,特提出本实用新型。
技术实现要素:
4.为了解决现有技术存在的上述问题,本实用新型提供了一种多传感器自动驾驶车辆校验场地,是第一款为具有多个传感器的l3级商用车的校验场地,可以在同一个场地完成多个传感器的校验。
5.本实用新型的技术方案为:一种多传感器自动驾驶车辆校验场地,包括车辆摆正器及排列在所述车辆摆正器前面和两侧的多个摄像头校验标靶和角反射器,多个所述摄像头校验标靶包括设置在车辆摆正器右后侧面的第一标靶、右侧面的第二标靶、右前侧面的第三标靶、前方中间远距离的第四标靶、前方中间近距离的第五标靶、左前侧面的第六标靶、左侧面的第七标靶和左后侧面的第八标靶;所述角反射器包括设置在车辆摆正器前方中间远距离的第一角反射器、设置在车辆摆正器右后侧的第二角反射器以及设置在车辆摆正器左后侧的第三角反射器。
6.进一步地,所述多传感器自动驾驶车辆校验场地还包括设置在角反射器附近的多处吸波材料,包括设置在第一角反射器前面的第一吸波材料、设置在第三靶标和第六靶标中间的第二吸波材料、设置在第二角反射器后面的第三吸波材料和设置在第三角反射器后面的第四吸波材料。
7.进一步的,所述第一标靶、第二标靶、第七标靶、第八标靶、第二角反射器和第三角反射器为固定位置,相对于车辆摆正器不变动位置。
8.进一步的,所述第三标靶、第四标靶、第五标靶、第六标靶、第一吸波材料、第一角反射器和第二吸波材料的位置能够自动移动,以保证被校验车辆的通过性。
9.本实用新型的有益效果:1、通过在场地四周设置多个校验标靶和角反射器,分别对应多传感器自动驾驶车辆上的多个摄像头和纳米波雷达,可以一次性校验车辆上所有的摄像头和纳米波雷达,校验效率高。
10.2、通过在角反射器附近设置吸波材料,可以排除反射后的杂波对雷达的干扰,提高了校验准确性。
11.3、校验场地前方的标靶、角反射器和吸波材料能够自动移动,使得被校验车辆在校验完成后能够快速驶离校验场地,缩短单辆车辆的校验时间,提高校验效率。
附图说明
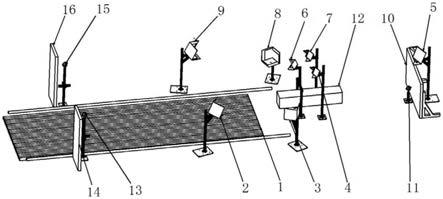
12.图1是本实用新型多传感器自动驾驶车辆校验场地一种实施例的结构示意图。
13.图2是图1所示实施例的校验靶标设置示意图。
14.图3是本实用新型多传感器自动驾驶车辆校验场地另一种实施例的使用状态示意图。
15.其中,1-车辆摆正器,2-第一标靶,3-第二标靶,4-第三标靶,5-第四标靶,6-第五标靶,7-第六标靶,8-第七标靶,9-第八标靶,10-第一吸波材料,11-第一角反射器,12-第二吸波材料,13-第二角反射器,14-第三吸波材料,15-第三角反射器,16-第四吸波材料。
具体实施方式
16.以下结合附图,对本实用新型一种多传感器自动驾驶车辆校验场地做进一步地说明。
17.如图1和图2所示,为本实用新型一种多传感器自动驾驶车辆校验场地一个实施例的结构示意图,该多传感器自动驾驶车辆校验场地包括车辆摆正器1及排列在车辆摆正器1前面和两侧的多个摄像头校验标靶和角反射器,这些摄像头校验标靶按照逆时针方向介绍,分别为:设置在车辆摆正器右后侧面的第一标靶2、右侧面的第二标靶3、右前侧面的第三标靶4、前方中间远距离的第四标靶5、前方中间近距离的第五标靶6、左前侧面的第六标靶7、左侧面的第七标靶8和左后侧面的第八标靶9。另外,这些角反射器分别为:设置在车辆摆正器1前方中间远距离的第一角反射器11、设置在车辆摆正器1右后侧的第二角反射器13以及设置在车辆摆正器1左后侧的第三角反射器15。
18.这些摄像头校验标靶和角反射器分别用来对应多传感器自动驾驶车辆上的摄像头或者雷达,例如第一标靶2对应车辆上的右后摄像头,第二标靶3对应车辆上的右侧摄像头,第三标靶4对应车辆上的右前摄像头,第四标靶5对应车辆上的长焦摄像头和纳米波雷达,第五标靶6对应车辆上的前中摄像头,第六标靶7对应车辆上的左前摄像头,第七标靶8对应车辆上的左侧摄像头,第八标靶9对应车辆上的左后摄像头;第一角反射器11对应车辆上的前向毫米波雷达,第二角反射器13对应车辆上的右后毫米波雷达,第三角反射器15对应车辆上的左后毫米波雷达。
19.为了避免雷达被杂波干扰,在每个角反射器附近都设置吸收杂波的吸波材料,包括设置在第一角反射器11前面的第一吸波材料10、设置在第三靶标4和第六靶标7中间的第二吸波材料12、设置在第二角反射器13后面的第三吸波材料14和设置在第三角反射器15后面的第四吸波材料16。第一吸波材料10用来吸收车辆上的前向毫米波雷达净空区域内的杂波,第二吸波材料12用来吸收前向毫米波雷达fov限制区域内的杂波,第三吸波材料14用来吸收右后毫米波雷达净空区域内的杂波,第四吸波材料16用来吸收左后毫米波雷达净空区域内的杂波。
20.第一标靶2、第二标靶3、第七标靶8、第八标靶9、第二角反射器13和第三角反射器15为固定位置,相对于车辆摆正器1不变动位置。
21.第三标靶4、第四标靶5、第五标靶6、第六标靶7、第一吸波材料10、第一角反射器11和第二吸波材料12的位置能够自动移动,以保证被校验车辆的通过性。
22.在一个具体的实施例中,本实用新型的多传感器自动驾驶车辆校验场地设置在一
个长15米,宽5米,高4.5米的室内空旷空间内,要求停放待校验车辆停车区的地面平整度《20mm,在校验区的地面上布置车辆摆正器1用于摆放待校验车辆,然后在车辆摆正器1的右后侧、右侧、右前侧、前侧远距离、前侧近距离、左前侧、左侧和左后侧分别设置第一标靶2、第二标靶3、第三标靶4、第四标靶5、第五标靶6、第六标靶7、第七标靶8和第八标靶9;设置完靶标后,又在车辆摆正器1的右后侧、前侧远距离和左后侧分别设置第二角反射器13、第一角反射器11和第三角反射器15;最后在车辆摆正器1的右后侧、前侧远距离、前侧近距离和左后侧分别设置第三吸波材料14、第一吸波材料10、第二吸波材料12和第四吸波材料16。
23.在本实用新型中,所谓的前侧远距离和前侧近距离是相对来说的,其中前侧远距离相对于前侧近距离来说,前者比后者离待校验车辆的车头上的水平距离更远。
24.图3示出了本实用新型一种多传感器自动驾驶车辆校验场地一种实施例的使用状态示意图,显示的是对被校验车辆上毫米波雷达的校验场景。被校验的车辆行驶到车辆摆正器1上,各个车轮固定在车辆摆正器1的预定位置,车辆上的前向毫米波雷达发射的毫米波为第一角反射器11所接受并反射,车辆上的右后毫米波雷达发射的毫米波为第二角反射器13所接受并反射,车辆上的左后毫米波雷达发射的毫米波为第三角反射器15所接受并反射。前向毫米波雷达射向fov限制区域内的毫米波被第二吸波材料12所吸收,不会产生干扰第一角反射器11的杂波。另外,没有射向第一角反射器11、第二角反射器13和第三角反射器15的毫米波会被第一吸波材料10、第三吸波材料14和第四吸波材料16所吸收,避免产生干扰各毫米波雷达的杂波。
25.以上实施例仅用以说明本实用新型的技术方案,并非用来限定本实用新型的实施范围。但凡在本实用新型的保护范围内所做的等效变化及修饰,皆应认为落入了本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1