浮筒式摄像装置的制作方法
1.本技术涉及一种浮筒式摄像装置,属于用于清洁机器或设备的附件或零件技术领域。
背景技术:
2.清淤机器人在管道、沟渠、污水池作业时,为实时掌握机器人运行状况,要求操作员随时观察密闭空间内周边环境,由此需要在机器人上部架设摄像装置。然而,在实际施工中,由于机器人清淤为运行状况下的不停产作业,污水面随时产生变化,固定式或机械升降式的摄像装置,其摄像位置很难及时调整,往往会产生摄像头浸水或碰撞池顶梁现象。
技术实现要素:
3.有鉴于此,本技术提供一种专用于清淤机器人的浮筒式摄像装置,该装置可随着污水面的变化自动调整高度,避免水位突然上升或下降对摄像装置造成影响。
4.具体地,本技术是通过以下方案实现的:
5.浮筒式摄像装置,包括浮筒、防水摄像头、拉线机构和挡板,所述浮筒为中空结构,防水摄像头位于浮筒顶部,拉线机构设置在浮筒两侧,挡板位于防水摄像头外侧,且其顶部所在高度不低于防水摄像头所在高度。
6.将本技术应用于清淤机器人时,清淤机器人自身重力作用下下沉,浮筒为中空结构,因此可以带动防水摄像头一起浮于水上,当该装置随清淤机器人一起前进时,浮筒虽然会产生轻微晃动,但并不会影响到防水摄像头的摄影;挡板的高度设置,能够防止水位过高、管道和沟渠顶部空间不足情况下的碰撞或卡死现象,浮筒自身浮力与挡板与管道或沟渠顶部之间的作用力两者相互配合,对防水摄像头高度进行限制,防止防水摄像头发生损坏。
7.进一步的,作为优选:
8.所述挡板为弧形板,大多数管道为圆管,弧形板方便其运行中结构上的适应性;即便为非圆管,弧形板存在一个最高点,既能起到防碰撞的作用,也可以减小接触面,避免因摩擦较大影响本技术摄像装置的正常移动。
9.所述挡板设置有两块,分别位于防水摄像头两侧,既对防水摄像头起到保护作用,避免两侧凸起对防水摄像头的碰撞,又起到限位的作用。
10.所述浮筒为上宽小窄的锥形结构,利于浮筒稳定。
11.所述防水摄像头通过支架安装在浮筒顶部;更优选的,所述支架包括前板和后板,防水摄像头安装在后板上,前板对应位置设置鹰眼,两者形成鹰眼原理的摄像头,在小幅摆动状况下能保持摄像画面稳定,有效防止操作员视觉疲劳和头晕。
12.所述浮筒两侧设置有防翻臂,防翻臂靠近浮筒底部设置,防翻臂的设置既可以起到导向作用,又能防止浮筒翻转。更优选的,所述防翻臂相对浮筒对称设置,以更好的使浮筒保持平衡。
13.所述拉线机构为回弹伸缩拉线盒,拉线长度根据常规污水池深配置,长度在3-5米间,拉线机构引出拉线,在一定受力状况下,拉线自动伸长,当受力减小时,钢丝绳自动回缩。回缩拉力根据浮筒浮力配置,本方案中单个拉线机构回拉力为0.9kg。
14.所述浮筒两侧分别设置有拉线机构和防翻臂,拉线机构居上,防翻臂居下,防翻臂上设置通孔,拉线机构引出的拉线经通孔穿过,拉线机构与通孔之间的拉线相对浮筒侧壁的夹角θ为10-30
°
,拉线伸缩方向与浮筒平面呈上述角度,有利于整个浮筒的稳定,防止在水流作用下发生自身缠绕。
15.本技术上述装置解决了传统固定摄像装置所产生的某些弊病,如:施工前水深无法预测,施工中水位随时变化,池体顶部有位置较低的横梁等。与传统机械臂式的升降装置相比,该装置具有结构简单实用、成本低、部件少、维修方便等特点。
附图说明
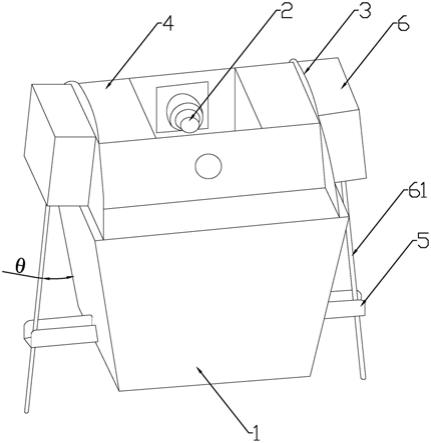
16.图1为本技术正面状态的立体结构示意图;
17.图2为本技术背面状态的立体结构示意图。
18.图中标号:1.浮筒;2.防水摄像头;3.挡板;4.支架;41.前板;42.后板;43.鹰眼;5.防翻臂;6.拉升机构;61.拉绳。
具体实施方式
19.本实施例浮筒式摄像装置,结合图1和图2,包括浮筒1、防水摄像头2和挡板3,浮筒1为中空结构,防水摄像头2位于浮筒1顶部,挡板3位于防水摄像头2外侧,且其顶部所在高度不低于防水摄像头2所在高度。
20.将本实施例摄像装置应用于清淤机器人时,清淤机器人自身重力作用下下沉,浮筒1为中空结构,因此可以带动防水摄像头2一起浮于水上,当该装置随清淤机器人一起前进时,浮筒1虽然会产生轻微晃动,但并不会影响到防水摄像头2的摄影;挡板3的高度设置,能够防止水位过高、管道和沟渠顶部空间不足情况下的碰撞或卡死现象,浮筒1自身浮力与挡板3与管道或沟渠顶部之间的作用力两者相互配合,对防水摄像头2高度进行限制,防止防水摄像头2发生损坏。
21.作为一个备选方案:结合图1,挡板2为弧形板,大多数管道为圆管,弧形板方便其运行中结构上的适应性;即便为非圆管,弧形板存在一个最高点,既能起到防碰撞的作用,也可以减小接触面,避免因摩擦较大影响本技术摄像装置的正常移动。
22.作为一个备选方案:结合图1,挡板2设置有两块,分别位于防水摄像头2两侧,既对防水摄像头2起到保护作用,避免两侧凸起对防水摄像头2的碰撞,又起到限位的作用。
23.作为一个备选方案:结合图1,浮筒1为上宽小窄的不锈钢中空锥体,该结构有利于浮筒1稳定。
24.作为一个备选方案:结合图1,防水摄像头2通过支架4安装在浮筒1顶部。
25.优选的:
26.结合图2,支架4包括前板41和后板42,防水摄像头2安装在后板42上,前板41对应位置设置鹰眼43,两者形成鹰眼原理的摄像头,在小幅摆动状况下能保持摄像画面稳定,有效防止操作员视觉疲劳和头晕。
27.上述防水摄像头可以直接采用运动摄像头,可以最大程度的适应动态下的图影采集。
28.作为一个备选方案:结合图1,浮筒1两侧均设置有防翻臂5,防翻臂5靠近浮筒1底部,防翻臂5的设置既可以起到导向作用,又能防止浮筒1翻转。优选的:防翻臂5成对设置,且对称设置,以更好的使浮筒1保持平衡。
29.作为一个备选方案:结合图1,拉线机构6为回弹伸缩拉线盒,拉线长度根据常规污水池深配置,长度在3-5米间。拉线机构6引出拉线61,在一定受力状况下,拉线61自动伸长,当受力减小时,拉线61自动回缩。
30.其中,拉线机构6和防翻臂5可以同时设置,此时:拉线机构6居上,防翻臂5居下,防翻臂5上设置通孔(图中未示出),拉线机构6引出的拉线61经通孔穿过,拉线机构6与通孔之间的拉线61相对浮筒1侧壁的夹角θ为15-17
°
,拉线61伸缩方向与浮筒1平面呈上述角度,有利于整个浮筒1的稳定,防止在水流作用下发生自身缠绕。此时,可以将拉线机构6、支架4和挡板3均安装在浮筒1顶部,拉线机构6部分结构突出在浮筒1外壁所在平面,方便拉线61的引出,挡板3位于支架4与拉线机构6之间。
31.使用时:(1)在清淤机器人的箱体前端,设置固定孔和底座,拉线61下端穿套在固定孔处,浮筒1置于支架上;(2)当清淤机器人吊运入池或管道内时,机器人慢慢下沉至淤泥面,上述摄像装置由于浮筒1的浮力作用,始终浮于水面;(3)机器人开始作业,上述摄像装置随时传送机器人前进方向的画面至操控台,在机器人整体运动或水面流动时,浮筒1产生轻微晃动,由于鹰眼效应,防水摄像头也能传送静止画面而不受影响。
32.上述装置解决了传统固定摄像装置的某些弊病,如:施工前水深无法预测,施工中水位随时变化,池体顶部有位置较低的横梁等。与传统机械臂式的升降装置相比,该装置具有结构简单实用、成本低、部件少、维修方便等特点。
33.上述浮筒式摄像装置可以配合清淤机器人使用,在机器人上设置卡槽,用于放入(仅置入,无连接关系)上述浮筒式摄像装置,而拉线61则通过机器人上的穿孔固定在机器人上:当上述浮筒式摄像装置运行至深水区时,水的浮力足以使上述浮筒式摄像装置浮起并脱出卡槽,浮筒1及其上的防水摄像头2、挡板3、支架4、防翻臂5等则随着浮筒上升,浮筒两侧的拉线61一端(下端)与机器人固定,另一端(顶端末尾处)则与浮筒1上的拉线机构6固定,使浮筒1的运行路径得到限制,拉线61的设置起到很好的定位效果,浮筒不会偏离机器人过多;当水位降低时,浮筒1回落在卡槽中,并随机器人前行而前行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1