用于校准图像捕获模块的系统及方法与流程
1.本公开通常涉及图像捕获模块,更具体地,涉及一种用于校准图像捕获模块的系统及方法。
背景技术:
2.某些车辆使用相机来捕获车辆周围环境中的物体的图像。这些图像可用于识别和/或定位周围环境中的对象。然而,当车辆行驶时从车辆捕获的图像可能会模糊或失真,这会导致对象的识别和/或定位不准确。
技术实现要素:
3.本发明的方面在独立权利要求中阐述,并且优选特征在从属权利要求中阐述。一个方面的特征可以单独或与其他方面结合应用于任何方面。
4.根据一实施例,一种方法包括以下步骤:由图像捕获模块的相机捕获目标的第一图像。图像捕获模块和滚筒附接到固定装置,并且目标附接到滚筒。所述方法还包括以下步骤:确定目标图像的横向间距距离中的横向像素的数量、基于横向像素的数量确定横向对象像素大小、以及基于横向对象像素大小确定滚筒编码器速率。滚筒编码器速率被编程到连接至滚筒的滚筒编码器中。所述方法还包括以下步骤:在目标围绕滚筒的轴线旋转时,由图像捕获模块的相机捕获目标的第二图像、确定第二图像的纵向间距距离中的纵向像素的数量、以及将横向像素的数量与纵向像素的数量进行比较。
5.在某些实施例中,滚筒编码器速率是由滚筒编码器在滚筒编码器的轴的一次旋转中产生的电脉冲的数量。在一些实施例中,使用滚筒的周长和横向对象像素大小来计算滚筒编码器速率。目标可以是包括多个黑白正方形的棋盘图案,横向间距可以表示多个正方形中的一个正方形的宽度,纵向间距可以表示所述多个正方形中的一个正方形的长度。
6.在某些实施例中,所述方法包括以下步骤:响应于比较横向像素的数量和纵向像素的数量,确定横向像素的数量与纵向像素的数量是否匹配、基于滚筒编码器速率计算车辆编码器速率。在一些实施例中,所述方法还包括以下步骤:将车辆编码器速率编程到附接到车辆车轮的车辆编码器中、通过图像捕获模块的相机捕获第二目标的图像。图像捕获模块附接到车辆,第二目标附接到道路。
7.在某些实施例中,所述方法包括以下步骤:响应于将横向像素的数量与纵向像素的数量进行比较,确定横向像素的数量不同于纵向像素的数量、将滚筒编码器速率调整为调整的滚筒编码器速率、以及将调整的滚筒编码速率编程到滚筒编码器中。所述方法还包括以下步骤:在目标围绕滚筒的轴线旋转时由图像捕获模块的相机捕获目标的第三图像、确定第三图像的纵向间距距离中的纵向像素的数量、以及将横向像素的数量与第三图像的纵向间距距离中的纵向像素的数量进行比较。在一些实施例中,所述方法包括在恒定照明条件下将图像捕获模块的相机聚焦在目标上,并获得识别目标的亮部分和暗部分边界的两个像素之间的最大对比度。
8.根据另一实施例,一种系统包括固定装置、附接到固定装置的滚筒、附接到滚筒的目标、附接到滚筒的滚筒编码器以及附接到固定装置的图像捕获模块。图像捕获模块包括相机,所述相机捕获目标的第一图像,并且在目标围绕滚筒的轴线旋转时捕获目标的第二图像。所述系统还包括通信地耦合到滚筒编码器和相机的一个或多个控制器。所述一个或多个控制器确定目标的图像的横向间距距离中的横向像素的数量、基于横向像素的数量确定横向对象像素大小、以及基于横向对象像素大小确定滚筒编码器速率,其中所述滚筒编码器速率被编程到附接到滚筒的滚筒编码器中。所述一个或多个控制器进一步确定第二图像的纵向间距距离中的纵向像素的数量,并将横向像素的数量与纵向像素的数量进行比较。
9.根据又另一实施例,一个或多个计算机可读存储介质包含指令,当由处理器执行时,指令使处理器执行操作,包括由图像捕获模块的相机捕获目标的第一图像的步骤。图像捕获模块和滚筒附接到固定装置,并且目标附接到滚筒。所述操作还包括确定目标图像的横向间距距离中的横向像素的数量、基于横向像素的数量确定横向对象像素大小、以及基于横向对象像素大小确定滚筒编码器速率的步骤,其中滚筒编码器速率被编程到附接到滚筒的滚筒编码器中。所述操作还包括在目标围绕滚筒的轴线旋转时由图像捕获模块的相机捕获目标的第二图像、确定第二图像的纵向间距距离中的纵向像素的数量、以及将横向像素的数量与纵向像素的数量进行比较的步骤。
10.本公开的某些实施例的技术优势可以包括以下一个或多个。本公开描述了用于对图像捕获模块进行台架校准的系统和方法,其可以减少现场校准图像捕获模块所需的时间和/或人员。本公开的某些实施例使用位于实验室中的旋转滚筒来模拟移动道路,这允许操作员(例如,计算机程序员)以实时图像全速测试校准系统。由于人员在危险条件下(例如,在道路上和重型设备下工作)在现场校准图像捕获模块所花费的时间减少,现场人员的数量减少,并且昂贵的现场测试的成本可降至最低,因此,本文描述的用于对图像捕获模块进行台架校准的系统和方法可以提高现场校准的安全性和效率。本公开中描述的系统和方法可以被推广到不同的运输基础设施,包括铁路、公路和水路。
11.从以下附图、描述和权利要求中,其他技术优势对于本领域技术人员来说将显而易见。此外,虽然上面列举了具体的优势,但各种实施例可以包括所有、一些优势或不包括所列举的优势。
附图说明
12.为了帮助理解本公开,现在参考以下结合附图的描述,其中:
13.图1示出用于现场校准图像捕获模块和车辆编码器的示例系统;
14.图2示出可由图1的系统使用的示例图像捕获模块;
15.图3示出用于对图像捕获模块进行台架校准(bench calibrating)的示例系统;
16.图4示出用于现场校准图像捕获模块的示例方法;
17.图5示出用于对图像捕获模块进行台架校准的示例方法;以及
18.图6示出可由本文描述的系统和方法使用的示例计算机系统。
具体实施方式
19.某些车辆包括在车辆行驶时捕获图像的图像捕获系统。机器视觉模型可以使用这些图像来检测和/或定位车辆周围环境中的物体。本公开的实施例描述了用于校准这些系统使用的图像捕获模块和/或旋转编码器的系统和方法。这些校准程序可以确保这些系统中使用的图像捕获模块和旋转编码器同步,并提供清晰、高对比度和适当比例的图像。
20.图1至图6示出用于校准图像捕获模块的示例系统及方法。图1示出用于现场校准图像捕获模块的示例系统,图2示出可由图1的系统使用的示例图像捕获模块。图3示出用于对图像捕获模块进行台架校准(bench calibrating)的示例系统。图4示出用于现场校准图像捕获模块的示例方法,图5示出用于对图像捕获模块进行台架校准的示例方法。图6示出可由本文描述的系统和方法使用的示例计算机系统。
21.图1示出用于现场校准图像捕获模块140的示例系统100。系统100或其部分可以与实体相关联,该实体可以包括任何实体,例如企业、公司(例如,铁路公司、运输公司等),或者现场校准图像捕获模块140的政府机构(例如,交通部、公共安全部等)。系统100的元件可以使用硬件、固件和软件的任何适当组合来实现。例如,系统100的元件可以使用图6的计算机系统的一个或多个组件来实现。
22.系统100包括车辆110、车辆编码器120、光束130、一个或多个图像捕获模块140、计算机150、网络160和目标170。系统100的车辆110是能够自动移动的任何机器。车辆110可以是汽车、机车、卡车、公共汽车、飞机或适合移动的任何其他机器。车辆110可以以允许光束130的一个或多个组件(例如,传感器、相机等)捕获图像的任何速度运行。例如,车辆110可以是以65英里/小时(mph)行驶的铁路车辆。系统100的道路112是容纳车辆110的任何路径。例如,车辆110可以沿着道路112行进。道路112可以包括道路、高速公路、铁路轨道、水路等。
23.系统100的车辆编码器120是用于测量车轴旋转的旋转编码器或其他计时装置。车辆编码器120可以测量车轴旋转的次数。车辆编码器120可以附接到车辆110的车轴。车辆编码器120可以物理地和/或逻辑地连接到系统100的一个或多个组件。例如,车辆编码器120可以物理地和/或者逻辑地连接到图像捕获模块140的一个或者多个相机和/或传感器。作为另一示例,车辆编码器120可以物理地和/或逻辑地连接到计算机150。
24.车辆编码器120可以通过控制器与图像捕获模块140的相机通信,以确保相机捕获相同视角和比例的图像,而与车辆110的行驶速度无关。例如,车辆编码器120可以与图像捕获模块140的多个相机同步,以确保所有相机同时拍摄图像。作为另一示例,车辆编码器120可以与图像捕获模块140的相机同步,以确保以第一速度(例如,每小时10英里)与车辆110一起行驶的相机捕获与以第二速度(例如,每小时65英里)与车辆110一同行驶的相机具有相同视角和比例的图像。
25.系统100的光束130是一种结构,其包括并定向用于捕获图像的组件(例如,图像捕获模块140)。在某些实施例中,除了光束130在捕获静止物理对象的图像时处于运动状态,光束130的操作类似于平板文档扫描仪。光束130与车辆110接合。例如,光束130可以螺栓固定到附接到车辆110的子框架上。在图1所示的实施例中,光束130具有三个部分,包括两个端部部分和一个中心部分。光束130具有鸥翼构造,使得中心部分向内朝向光束130的中心弯曲。鸥翼构造允许光束130内的图像捕获模块140的图像捕获组件(例如,传感器、相机等)相对于被捕获的物理对象在其中适当地定向。在某些实施例中,光束130的中心部分被省
略,并且每个端部部分连接到车辆110。光束130可以由金属(例如,钢或铝)、塑料或任何其他适合于容纳光束130的部件并用于将光束130附接到车辆110的材料制成。
26.光束130可以包括一个或多个开口。开口可用于将图像捕获模块140放置在光束130内。开口可以允许安装、调整和维护图像捕获模块130。虽然光束130在图1中被示为具有特定尺寸和形状,但光束130可以具有适合于容纳和定向图像捕获模块140的任何尺寸和形状。可以有助于光束130的设计的其他因素包括抗冲击性、抗振动性、防风雨考虑、耐用性、易于维护、校准考虑和易于安装。
27.系统100的图像捕获模块140用于在车辆110行驶时捕获图像。每个图像捕获模块140可以包括一个或多个传感器、一个或多个相机等。一个或多个图像捕获模块140可以在允许图像捕获模块140捕获车辆110周围环境的图像的任何位置处附接到车辆110。在图1所示的实施例中,图像捕获模块140位于光束130内。
28.在某些实施例中,光束130的每个端部部分容纳一个或多个图像捕获模块140。例如,光束130的第一端部部分可以容纳图像捕获模块140,该图像捕获模块140包括两个面向下的相机,其用于捕获轨道的连接区域和道碴区域的图像。光束130的第一端部部分可以将两个朝下的相机容纳在第一端部的与轨道基本水平的部分中。与第一端部部分相对的光束130的第二端部部分可以容纳两个图像捕获模块140,每个图像捕获模块包括捕获轨道和轨道紧固系统两侧的图像的两个成角度的相机。光束130的第二端部部分可以将四个成角度的相机容纳在第二端部部分的与轨道成角度(例如,45度角)的部分中。
29.根据感测和/或测量要求,图像捕获模块140可以包括各种类型的传感器。由图像捕获模块140容纳的传感器可以包括光学传感器(例如,用于可见光(单色和彩色)、红外线、紫外线和/或热的相机)、运动传感器(例如,陀螺仪和加速度计)、光检测和测距(lidar)传感器、高光谱传感器、全球定位系统(gps)传感器等。光学传感器和激光器可以一起用于激光三角测量以测量偏转或轮廓。激光雷达传感器可用于生成三维(3d)点云数据。高光谱传感器可用于特定波长响应。下面在图2中描述示例图像捕获模块140。
30.系统100的计算机150表示可用于为系统100处理信息的任何合适的计算组件。计算机150可以协调系统100的一个或多个组件。计算机150可以从图像捕获模块140和/或车辆编码器120接收数据。计算机150可以监控图像捕获模块140和/或车辆编码器120的输入和/或输出。计算机150可以包括允许用户(例如,技术人员)直接参与系统100的通信功能。例如,用户可以通过计算机150的界面(例如,屏幕、图形用户界面(gui)或面板)访问计算机150。计算机150可以是膝上型计算机、台式计算机、智能手机、平板电脑、个人数字助理、可穿戴计算机等。计算机150可以位于车辆110的内部或外部。计算机150可以通过网络160与系统100的一个或多个组件通信。
31.系统100的网络160是促进系统100的组件之间的通信的任何类型的网络。网络160的一个或多个部分可以包括自组织网络、内联网、外联网、虚拟专用网络(vpn)、局域网(lan)、无线局域网(wlan)、广域网(wan)、无线广域网(wwan)、城域网(man)、互联网的一部分、公共交换电话网络(pstn)的一部分、蜂窝电话网络、3g网络、4g网络、5g网络、长期演进(lte)蜂窝网络、这些网络中的两个或多个的组合或其他合适类型的网络。网络160的一个或多个部分可以包括一个或多个接入(例如,移动接入)、核心和/或边缘网络。网络160可以是任何通信网络,例如专用网络、公共网络、通过互联网的连接、移动网络、wi-fi网络、蓝牙
网络等。系统100的一个或多个组件可以通过网络160进行通信。例如,计算机150可以通过网络160进行通信,包括从图像捕获模块140和/或车辆编码器120接收信息。
32.系统100的目标170是用于校准图像捕获模块140和/或车辆编码器120的对象。在某些实施例中,目标170被放置在图像捕获模块140的清晰视野中。例如,目标170可以在图像捕获模件140的相机的清晰视野下固定到道路112(例如,铁路轨道)。目标170包括校准图案。校准图案可以是任何合适的尺寸、形状和/或设计。校准图案设计可以包括西洋跳棋棋盘图案(checkerboard pattern)、棋盘图案(chessboard pattern)、圆形网格图案、charuco板(charucoboard)图案等。例如,校准图案可以是包括多个黑白正方形的印刷黑白棋盘图案。校准图案可以具有0.375英寸和2.0英寸之间的间距(例如,0.5英寸、1.0英寸等)。间距表示棋盘图案的一个正方形的长度/宽度。在某些实施例中,校准图案可以包括具有不等长宽比的单元。例如,每个单元的长度可以是每个单元宽度的两倍。
33.在操作中,车辆编码器速率被编程到车辆编码器120中。车辆编码器速率是车辆编码器120在车辆编码器120的轴的一次旋转中产生的电脉冲的数量。如下面的图3及图5中所述,车辆编码器速率可以根据先前在台架校准程序中产生的校准数据来确定。如果台架校准数据不可用,则可以将车辆编码器速率的任意初始值编程到车辆编码器120中。在某些实施例中,被编程到车辆解码器120中的车辆编码器速率是整数。在某些实施例中,操作员将车辆编码器速率编程到车辆编码器120中。
34.系统100的车辆编码器120和图像捕获模块140被固定到车辆110。考虑到要校准的图像捕获模块的相机,系统100的目标170被固定到道路112。目标170垂直于图像捕获模块140的相机的轴定位。图像捕获模块140的相机被激活,并且操作员在恒定照明条件下观察相机的当前焦点。如果识别目标170的亮部分和暗部分边界的两个像素之间的对比度小于可获得的最大对比度(或小于在台架校准过程中观察到的对比度),则操作员解锁相机的聚焦机制并调整聚焦,直到达到最大对比度。然后锁定聚焦机制。
35.图像捕获模块140通过网络160连接到计算机150。计算机150包括图像捕获软件。图像捕获模块140捕获目标170的第一图像,其显示在计算机150上。操作员确定目标170的第一图像的横向间距距离中的横向(例如,横向(cross-web))像素的数量,并通过将目标170的间距除以间距区域中的横向像素的数量来确定横向对象像素大小(ops)。然后通过将车辆110的车轮周长除以横向ops来确定试验车辆编码器速率。如果试验车辆编码器速率不同于编程到车辆编码器120中的初始车辆编码器速率,则试验车辆编码器速率被编程到车辆编码器120中。计算机150的图像捕获软件被车辆编码器120触发,并且车辆110在目标170上向前或向后移动。
36.当车辆110在目标170上移动时,图像捕获装置140捕获目标170的第二图像。计算机150的操作员确定(例如,计数)每个第二图像的一个纵向间距中的亮或暗纵向(例如,纵向(down-web))像素的数量,并将横向像素的数量与纵向像素的数量进行比较。如果横向像素的数量与纵向像素的数量匹配,则校准图像捕获模块140和车辆编码器120。如果横向像素的数量不同于纵向像素的数量,则调整车辆编码器速率,直到横向像素的数量与纵向像素的数量匹配。因此,系统100可以用于校准图像捕获模块140和车辆编码器120,以确保系统100捕获足够的图像,这些图像可用于准确识别车辆110周围环境中的物体。
37.尽管图1示出了车辆110、车辆编码器120、光束130、图像捕获模块140、计算机150、
网络160和目标170的特定布置,但本公开考虑了车辆110、车辆编码器120、光束130、图像捕获模块140、机算机150、网络160和目标170的任何合适的布置。例如,计算机150可以位于车辆110内部。车辆110、车辆编码器120、光束130、图像捕获模块140和计算机150可以在物理地或逻辑地彼此整体或部分地位于同一位置。
38.尽管图1示出了特定数量的车辆110、车辆编码器120、光束130、图像捕获模块140、计算机150、网络160和目标170,但本公开考虑了任何合适数量的车辆100、车辆编码器120、光束130、图像捕获模块140、计算机150、网络160和目标170。例如,系统100可以包括位于车辆110前端的第一光束130和位于车辆110后端的第二光束130。作为另一示例,系统100可以包括多个计算机150。系统100的一个或多个组件可以使用图6的计算机系统的一个或者多个组件来实现。
39.图2示出了可由图1的系统100使用的示例图像捕获模块140。图像捕获模块140包括相机210、镜头220、顶板230、基板240、盖板250、螺栓260及开口270。相机210是捕获图像的任何设备。例如,相机210可以捕获图1的目标170的图像。作为另一示例,相机210可以捕获轨道部件(例如,轨道接头、道岔、辙叉、紧固件、道碴、轨头和/或轨枕)的图像。在某些实施例中,相机210包括一个或多个传感器。
40.一个或多个相机210可以从不同角度捕获图像。例如,一个或多个相机210可以在任何给定位置捕获铁路系统的两个轨道的图像。每个光束(例如,图1的光束130)可以包括多个相机210。光束可以包括直接向下瞄准以捕获目标(例如,在图1中的目标170)、物理对象等的俯视图像的第一相机210。光束可以包括向下和向外瞄准以捕获该目标、物理对象等成角度图像的第二相机210。
41.相机210可以是线扫描相机。线扫描相机包括单行像素。相机210可以是双线扫描相机。双线扫描相机包括可以同时捕获和/或处理的两行像素。当相机210在物理对象上移动时,相机210可以捕获图像,使得可以在软件中逐行重建物理对象的完整图像。相机210可以具有高达140khz的捕获速率。相机210可以具有用于检测尺寸至少为1/16英寸的物理对象的分辨率和光学器件。在某些实施例中,相机210包括镜头220,镜头220聚焦入射光并将入射光引导至相机210的传感器。镜头220可以是玻璃片或其他透明物质。镜头220可以由任何合适的材料(例如,钢、铝、玻璃、塑料或其组合)制成。
42.顶板230和基板240是用于定位、支撑和/或稳定图像捕获模块140的一个或多个组件(例如,相机210或传感器)的结构元件。顶板230和基板540可以由任何合适的材料(例如,钢、铝、塑料、玻璃等)制成。顶板230可以通过一个或多个螺栓260连接到基板240。螺栓260(例如,定位螺栓)可用于改变相机210的俯仰和/或滚动方向。例如,螺栓260可用于改变顶板230和基板240之间的有效高度。顶板230和/或基板240可被调整以减少图像捕获模块140的振动和/或冲击。顶板230或基板240可以包括电阻加热元件,以在较冷天气期间为相机210和镜头220提供温暖的工作环境。
43.盖板250是覆盖基板240的板。盖板250可以由任何合适的材料(例如,玻璃、钢、铝等)制成。盖板250包括开口270。开口270可以用作相机210的镜头观察物理对象的孔径。开口270允许来自周围环境的感测信号传输到相机210的传感器。开口270可以是任何合适的尺寸(例如,椭圆形、矩形等),以适应相机210的视图。相机210的镜头220可以直接位于开口270上方。
44.尽管图2示出了相机210、镜头220、顶板230、基板240、盖板250、螺栓260和开口270的特定布置,但本公开考虑了相机210、镜头220、顶板230、基板240、盖板250、螺栓260和开口270的任何适当布置。尽管图2示出了特定数量的相机210、镜头220、顶板230、基板240、盖板250、螺栓260和开口270,但本公开考虑了任何适当数量的相机210、镜头220、顶板230、基板240、盖板240、螺栓260以及开口270。例如,图像捕获模块140可以包括多个相机210。作为另一示例,在某些实施例中,图像捕获模块140可以不包括图2所示的某些组件(例如,基板240)。图像捕获模块140的一个或多个组件可以使用图6的计算机系统的一个或者多个元件来实现。
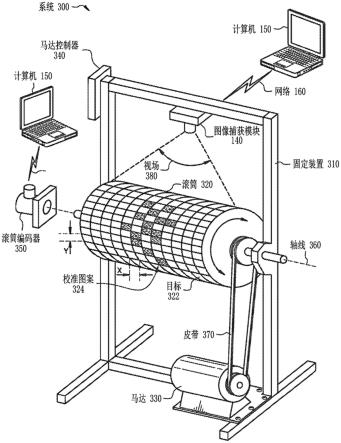
45.图3示出了用于对图像捕获模块140进行台架校准的示例系统300。台架校准包括校准过程,其中使用校准设备在台架上校准图像捕获模块,以模拟过程,而不是使用实际过程本身在现场校准图像捕获模块140。系统300模拟在图像捕获模块140下移动的道路(例如,图1的道路112)。系统300或其部分可以与实体相关联,该实体可以包括任何实体,例如企业、公司(例如,铁路公司、运输公司等),或对图像捕获模块140进行台架校准的政府机构(例如,交通部、公共安全部等)。系统300的元件可以使用硬件、固件和软件的任何适当组合来实现。例如,系统300的元件可以使用图6的计算机系统的一个或多个组件来实现。
46.图3的系统300包括图像捕获模块140、计算机150、网络160、固定装置310、滚筒320、马达330、马达控制器340和滚筒编码器350。系统300的固定装置310是用于支撑系统300的一个或多个组件的任何结构。固定装置310可以包括一个或多个框架、面板、支架、紧固件(例如,螺钉、螺栓等)等。系统300的一个或多个组件可以安装在固定装置300上。在图3所示的实施例中,图像捕获模块140、滚筒320、马达330、马达控制器340和滚筒编码器350安装在固定装置310上。
47.图像捕获模块140安装在固定装置310上,在图像捕获模块140和目标322之间具有固定的工作距离。该工作距离是标称工作距离,并且可以在使用图像捕获模块140的不同车辆(例如,图1的车辆110)之间稍微变化。在某些实施例中,图3的图像捕获模块140和目标322之间的固定工作距离基本上(例如,在5%以内)等于安装在图1的车辆110上的图像捕获组件140和固定到图1的道路112上的目标170之间的固定工作距离。图像捕获模块140可以物理地和/或逻辑地连接到系统300的一个或多个组件。例如,图像捕获模块140可以物理地和/或逻辑地连接到滚筒编码器350。作为另一示例,图像捕获模块140可以物理地(例如,经由有线连接)和/或逻辑地(例如,通过网络160)连接到计算机150。
48.系统300的滚筒320是围绕轴线360旋转的物体。滚筒320用于模拟在图像捕获模块140下方移动的道路(例如,图1的道路112)。滚筒320可以是允许围绕轴线360旋转的任何合适的形状或尺寸。在图3所示的实施例中,滚筒320为圆柱形。在某些实施例中,轴线360穿过滚筒320的中心。滚筒320可以围绕沿轴线360定位的轴旋转。例如,圆柱形轴可以沿滚筒320的芯的长度(或其一部分)放置,并且滚筒320可以在轴之间旋转。滚筒320可以是任何合适的材料(例如,塑料、金属、木材、织物、其组合等)。例如,滚筒320可以是中空塑料圆筒,每个端部具有金属盖。滚筒320的轴可以穿过每个金属盖的中心。
49.系统100的目标322是用于校准相机120和/或滚筒编码器320的对象。系统300的目标3222附接到滚筒320。目标322与滚筒编码器350同轴并同步定位。目标3222可以是任何合适的材料(例如,纸、织物、塑料、油墨、其组合等)。在某些实施例中,可以使用一个或多个紧
固件(例如,粘合剂、螺钉、销钉、钉子等)将目标322紧固到滚筒320。例如,目标322可以粘合到滚筒320的外表面或内表面。在某些实施例中,滚筒322是中空透明管,并且目标322放置在中空透明管的内表面上,使得目标322从滚筒322的外部可见。在一些实施例中,目标322是滚筒320的一部分。例如,目标322可以直接印刷在滚筒320上。
50.目标322包括校准图案324。校准图案322可以是任何合适的尺寸、形状和/或设计。校准图案324的设计可以包括西洋跳棋棋盘图案(checkerboard pattern)、棋盘图案(chessboard pattern)、圆形网格图案、charuco板(charucoboard)图案等。例如,校准图案324可以是间距在0.375英寸和2.0英寸之间(例如,0.5英寸、1英寸等)的印刷的黑白棋盘图案。间距表示棋盘图案的一个正方形的长度/宽度。在某些实施例中,校准图案324可以包括具有不等长宽比的单元。例如,每个单元的长度可以是每个单元宽度的两倍。目标322的校准图案324与图1的目标170的校准图案相同。在某些实施例中,图1的目标322和目标170是相同的目标。
51.系统300的马达330是启动滚筒320旋转的任何机器。马达330可以是交流(ac)马达、直流(dc)马达、单相马达(例如,115/230伏)、三相马达(例如,230/460伏)等。马达可以具有1000至8000(例如,1700-1800)的每分钟转数(rpm)。马达330可以物理地或逻辑地连接到滚筒320。例如,皮带370可以用于将马达330连接到穿过滚筒320的轴线360的杆。皮带370用于将驱动力从马达330传递到滚筒320上。马达330可以在任何合适的位置附接到固定装置310上。在图3所示的实施例中,马达330附接到固定装置310的基座。
52.系统300的马达控制器340控制马达330的操作。例如,马达控制器340可用于启动马达330的旋转、调整马达330的速度等。在某些实施例中,马达控制器340由一个或多个用户手动操作。马达控制器340可以包括一个或多个按钮、开关、显示器、触摸传感器、gui等,其允许一个或更多用户(例如,操作员、技术人员等)输入信息。例如,马达控制器340可以包括允许用户打开和/或关闭马达的开/关开关、允许用户增加/降低马达速度的上/下按钮等。在一些实施例中,马达控制器340可以通过网络160连接到计算机150,这允许远程操作马达控制器340。马达330和马达控制器340以用户可选择的速率(例如,10至70英里/小时)驱动滚筒320。在某些实施例中,滚筒320与图1的车辆110的最大速度(例如,65或70mph)成比例地被驱动。
53.系统300的滚筒编码器350是用于测量车轴旋转的旋转编码器或其他计时装置。滚筒编码器350与图1的系统100中使用的车辆编码器120相同(例如,相同的品牌和型号)。滚筒编码器350可以测量轴旋转的次数。滚筒编码器350可以物理地和/或逻辑地连接到系统300的一个或多个组件。例如,滚筒编码器350可以物理地附接到滚筒320。作为另一示例,滚筒编码器35可以物理地和/或逻辑地连接到图像捕获模块140。作为又另一示例,滚筒编码器350可以物理地(例如,经由有线连接)和/或逻辑地(例如,经由网络160)连接到计算机150。
54.在操作中,用户(例如,操作员)将图像捕获模块140(或其部分,如图2的相机210)安装在固定装置310上,并将图像捕获模块140(如图2相机210)的一个或多个组件连接到计算机150(例如,计算机)。计算机150包括图像捕获软件。用户打开(例如,开关)图像捕获模块140的电源。用户解锁图像捕获模块140的聚焦锁定机制,并在恒定照明条件下将图像捕获模块140的相机聚焦在目标322上。当在标识目标322的校准图案324(例如,棋盘图案)的
亮部分和暗部分的边界的两个像素之间获得最大对比度时,实现成功聚焦。然后,用户锁定图像捕获模块140的聚焦机制。从计算机150上显示的图像中,用户观察目标322上的黑色或白色区域,该区域位于图像捕获模块140的相机的视场380的中间。视场380可以表示图像捕获模块140的相机拾取电磁辐射的角度。视场380可以受到计算机150上显示的图像区域的限制。计算机150的操作员对目标322的横向间距在方向x上的亮像素或暗像素的数量进行计数。在图3所示的实施例中,方向x平行于轴线360。通过将目标322的横向间距除以横向间距中的像素数量来计算横向对象像素大小(ops)。例如,如果目标322的横向间距距离等于一英寸,并且目标322的一英寸间距距离的像素数为52,则ops等于一英寸除以52,这等于每像素0.01923英寸。ops指示在规定工作距离(例如,图像捕获模块140的相机与目标322之间的距离)处由一个像素表示的真实物理尺寸。
55.测量和校准ops可以确保图像捕获模块140捕获的图像中描绘的对象具有适当的比例,并且当图像捕获模块140处于现场操作时,像素之间不会数据丢失。在某些实施例中,像素为正方形或近似正方形(例如,具有在百分之二公差内的相等长度和宽度)。由于图像捕获模块140和/或滚筒编码器350的相机的限制,可以允许有余量。
56.基于ops确定滚筒编码器350的编码器速率。滚筒编码器速率是滚筒编码器350在滚筒编码器350的轴旋转一圈时产生的电脉冲数。滚筒编码器速率等于滚筒320的周长除以横向ops。例如,如果直径为10.5英寸的滚筒的滚筒周长为32.9867英寸,横向ops为0.01923英寸,则滚筒编码器速率为32.9867英寸/转除以0.01923英寸,等于每转1715.31脉冲(像素)。
57.在某些实施例中,滚筒编码器速率作为整数值被编程到滚筒编码器350中。例如,滚筒编码器350可以被编程为每转1715或1716个脉冲。用户可以设置马达控制器340以低速旋转滚筒320。低速可以在5至20英里/小时(例如,10英里/小时)的范围内。图像捕获模块140在滚筒320以低速旋转时收集图像,并将收集的图像传送到计算机150。计算机150的操作员确定(例如,计数)在目标322上的一个纵向间距距离中y方向上的亮像素或暗像素的数量。在图3所示的实施例中,y方向垂直于轴线360。
58.然后,用户设置马达控制器340以高速旋转滚筒320。高速可以在50至80英里/小时(mph)(例如,65英里/小时)的范围内。高速可以表示图1的车辆110的最大速度。图像捕获模块140在滚筒320以高速旋转时收集图像,并将收集的图像传送到计算机150。计算机150的操作员确定(例如,计数)在纵向y上目标322上的一个间距距离中的亮像素或暗像素的数量。将高速和低速纵向像素计数与横向像素计数进行比较,以确定相机像素是否在横向和纵向上相等地表示物理空间。如果纵向像素计数不同于横向像素计数,则可以将不同的滚筒编码器速率编程到滚筒编码器350中,并且可以重复上述过程以比较新的滚筒编码器速率对横向和纵向上的像素计数的影响。
59.然后记录生成最接近正方形像素的滚筒编码器速率,并将其分配给图像捕获模块140。如果图1的车辆110的车轮直径已知,则可以计算车辆110的车辆编码器速率。车辆编码器速率是车辆编码器120在车辆编码器120的轴旋转一圈时产生的电脉冲数。车辆编码器速率等于图1的车辆110的车轮周长除以滚筒320的滚筒周长乘以滚筒编码器速率。例如,如果车辆110的车轮周长为113.097英寸,滚筒320的滚筒周长为32.9867英寸,并且滚筒编码器速率为每转32.9868英寸,则车辆编码器速率为133.097英寸除以32.986英寸乘以每转1715
个脉冲,等于每转5881个脉冲。用户可以将车辆编码器速率编程到图1的系统100的车辆编码器120中,这可以减少现场校准图像捕获模块140所需的时间和/或资源。
60.尽管图3示出了图像捕获模块140、计算机150、网络160、固定装置310、滚筒320、马达330、马达控制器340和滚筒编码器350的特定布置,但本公开考虑了图像捕获模块140、计算机150、网络160、固定装置310、滚筒320、马达330、马达控制器340和滚筒编码器350的任何适当布置。例如,马达330和马达控制器340可以是单个组件。图像捕获模块140、计算机150、固定装置310、滚筒320、马达330、马达控制器340和滚筒编码器350可以全部或部分地物理地或逻辑地彼此位于同一位置。
61.尽管图3示出了特定数量的图像捕获模块140、计算机150、网络160、固定装置310、滚筒320、马达330、马达控制器340和滚筒编码器350,但本公开考虑了任何合适数量的图像捕获模块140、机算机150、网络160、滚筒310、马达330、马达控制器340和滚筒编码器350。例如,系统300可以包括与图像捕获模块140通信耦合的第一计算机150和与滚筒编码器350通信耦合的第二计算机150。系统100的一个或多个组件可以使用图6的计算机系统的一个或者多个组件来实现。
62.图4示出了用于现场校准图像捕获模块的示例方法400。方法400开始于步骤405。在步骤410,图像捕获模块的相机(例如,图2的图像捕获模块140的相机210)捕获目标(例如,图1的目标170)的第一图像。图像捕获模块可以固定到车辆(例如,图1的车辆110)上,并且目标可以固定到道路(例如,图1的道路112)。目标垂直于图像捕获模块的相机的轴线。然后,方法400从步骤410移动到步骤415。由图像捕获模块的相机捕获的图像可以显示在通信地耦合到图像捕获模块上的计算机(例如,图1的计算机150)上。
63.在方法400的步骤415,操作员确定目标图像的横向间距距离中的横向像素的数量。例如,操作员可以在恒定照明条件下观察相机的当前焦点。如果识别聚焦目标的亮部分和暗部分边界的两个像素之间的对比度小于在台架测试中观察到的对比度,则操作员可以解锁聚焦机制并调整聚焦,直到获得满意的结果。然后锁定聚焦机构。然后,操作员可以计算相机视场中心处目标的横向间距距离中的亮像素或暗像素的数量。方法400然后从步骤415移动到步骤420。
64.在方法400的步骤420,使用确定数量的横向像素来确定横向ops。例如,操作员可以通过将目标322的间距(例如,一英寸)除以间距区域中的横向像素的数量来计算横向ops。方法400然后从步骤420移动到步骤425,其中基于编程到车辆(例如,图1的车辆110)的编码器(例如,图2的车辆编码器120)中的横向ops来确定车辆编码器速率。车辆编码器速率等于图1的车辆110的车轮周长除以横向ops。车辆编码器已设置为初始车辆编码器速率,该速率在台架校准过程中确定或任意确定。如果计算的车辆编码器速率不同于先前编程到车辆编码器中的初始车辆编码器速率,则将计算的编码器速率编程到车辆编码器中。方法400然后从步骤425移动到步骤430。
65.在步骤430,当车辆在目标上向前或向后移动时,图像捕获模块的相机捕获目标的第二图像。例如,火车操作员可以沿着铁路轨道移动火车的一个或多个部分(例如,机车),使得附接到火车的图像捕获模块经过固定到铁路轨道的目标。方法400然后从步骤430移动到步骤435。
66.在方法400的步骤435,操作员确定目标的第二图像的一个纵向间距距离中的纵向
像素的数量。方法400然后从步骤440移动到步骤445,其中操作员确定第一图像中的横向像素的数量是否与第二图像中的纵向像素的数量匹配。如果第一图像中的横向像素的数量与第二图像中的纵向像素的数量匹配,则方法400从步骤440移动到步骤445,其中操作员基于比较确定图像捕获模块被校准。
67.如果在步骤440,操作员确定第一图像中的横向像素的数量不同于第二图像中的纵向像素的数量,则方法400从步骤440移回步骤425,其中操作员调整车辆编码器速率以解决差异,并将新的车辆编码器速率编程到车辆编码器中。重复步骤425至440,直到第一图像中的横向像素的数量与第三图像(或第四图像等根据需要)中的纵向像素的数量匹配。当横向和纵向像素的数量匹配时,方法400从步骤440移动到步骤445,其中操作员基于比较确定图像捕获模块被校准。方法400然后从步骤445移动到步骤450,其中方法400结束。
68.可以对图4所示的方法400进行修改、添加或省略。方法400可以包括更多、更少或其他步骤。例如,方法400可以包括将初始车辆编码器速率编程到车辆编码器中。作为另一示例,方法400可以包括激活图像捕获模块的相机。可以并行地或以任何合适的顺序执行步骤。尽管作为完成方法400的步骤的特定组件进行了讨论,但任何合适的组件都可以执行方法400的任何步骤。
69.图5示出了用于对图像捕获模块进行台架校准的示例方法500。方法500开始于步骤505。在步骤510,将图像捕获模块的相机(例如,图2的图像捕获模块140的相机210)、滚筒(例如,图3中的滚筒320)和马达(例如,图3的马达330)附接到固定装置(例如,图3的固定装置310)。然后,方法500从步骤510移动到步骤515,其中目标(例如,图3的目标322)被固定到滚筒。目标与滚筒编码器(例如,图3的滚筒编码器350)同轴并同步地定位。图像捕获模块安装在固定装置中,相机和目标之间具有固定的工作距离。该工作距离是标称工作距离,并且可以在使用图像捕获模块140的不同车辆之间稍微变化。然后,方法500从步骤515移动到步骤520。
70.在步骤520,相机捕获目标的第一图像。相机可以连接到包括图像捕获软件的计算机(例如,图3的计算机150)。第一图像可以是操作员使用计算机观察到的位于相机视野中间的图像。方法500然后从步骤520移动到步骤525,其中确定目标图像的横向间距距离中的横向像素的数量。例如,操作员可以使用显示在计算机上的第一图像来计算相机视场中心处的目标的横向间距距离中的亮像素或暗像素的数量。方法400然后从步骤525移动到步骤530。
71.在方法500的步骤530,使用确定数量的横向像素确定横向ops。通过将目标322的间距(例如,一英寸)除以间距区域中的横向像素的数量来计算横向ops。方法500然后从步骤530移动到步骤535,其中滚筒编码器速率被编程到滚筒的滚筒编码器(例如,图3的滚筒编码器350)中。滚筒编码器速率等于滚筒320的周长除以横向ops。方法500然后从步骤535移动到步骤540,其中滚筒编码器速率被编程到滚筒编码器中。在某些实施例中,滚筒编码器用表示滚筒编码器速率的整数值进行编程。方法500然后从步骤540移动到步骤545。
72.在方法500的步骤545,马达控制器被设置为以低速(例如,10mph)旋转滚筒。方法500然后从步骤545移动到步骤550,其中图像捕获模块的相机在滚筒以低速旋转时捕获目标的一个或多个图像。方法500然后从步骤550移动到步骤555,其中确定每个图像的一个纵向间距距离中的纵向像素的数量。例如,可以在计算机上显示每个图像,并且操作员可以计
算每个图像的纵向截面中的一个间距距离中的暗像素或亮像素的数量。方法500然后从步骤555移动到步骤560。
73.在步骤560,马达控制器被设置为以高速(例如,65mph)旋转滚筒。然后,方法500从步骤560移动到步骤565,其中图像捕获模块的相机在滚筒以高速旋转时捕获目标的一个或多个图像。然后,方法500从步骤565移动到步骤570,在步骤570中,当滚筒以高速旋转时,捕获每个图像的一个纵向间距距离中的多个纵向像素。例如,可以在计算机上显示每个图像,并且操作员可以计算每个图像的纵向截面中的一个间距距离中的暗像素或亮像素的数量。方法500然后从步骤570移动到步骤575。
74.在步骤575,操作员确定第一图像中的横向像素数量是否与滚筒以低速和高速旋转时捕获的图像中的纵向像素数量相匹配。如果第一图像中的横向像素的数量与低速/高速图像中的纵向像素的数量匹配,则方法500从步骤575移动到步骤580,其中使用滚筒编码器速率计算车辆编码器速率。车辆编码器速率等于图1的车辆110的车轮周长除以图3的滚筒320的滚筒周长,然后乘以滚筒编码器速率。方法500然后从步骤580移动到步骤585,其中方法500结束。
75.如果在步骤575,第一图像中的横向像素的数量不同于低速/高速图像中的纵向像素的数量,则方法500从步骤575移回步骤540,其中调整滚筒编码器速率以解决差异。调整后的滚筒编码器速率被编程到滚筒编码器中。重复步骤540至575,直到第一图像中的横向像素的数量与低速/高速图像中的纵向像素的数量匹配。当横向和纵向像素的数量匹配时,方法500从步骤575移动到步骤580,其中使用调整后的滚筒编码器速率来计算车辆编码器速率。方法500然后从步骤580移动到步骤585,其中方法500结束。
76.可以对图5所示的方法400进行修改、添加或省略。方法500可以包括更多、更少或其他步骤。例如,方法500可以包括激活图像捕获模块的相机。可以并行或以任何合适的顺序执行步骤。例如,尽管作为完成方法500的步骤的特定组件进行了讨论,但任何合适的组件都可以执行方法500的任何步骤。例如,方法500的一个或多个步骤可以自动化(例如,由图3的计算机150执行)。
77.图6示出可由本文所述的系统和方法使用的示例性计算机系统。例如,图1的系统100和/或图3的系统300的一个或多个组件(例如,计算机150)可以包括一个或多个界面610、处理电路620、存储器630和/或其他合适的元件。界面610接收输入、发送输出、处理输入和/或输出、和/或执行其他合适的操作。界面610可以包括硬件和/或软件。
78.处理电路620执行或管理组件的操作。处理电路620可以包括硬件和/或软件。处理电路的示例包括一个或多个计算机、一个或多个微处理器、一个或多个应用程序等。在某些实施例中,处理电路620执行逻辑(例如,指令)以执行动作(例如,操作),例如从输入生成输出。由处理电路620执行的逻辑可以被编码在一个或多个有形的、非暂时性的计算机可读介质(例如,存储器630)中。例如,逻辑可以构成计算机程序、软件、计算机可执行指令和/或能够由计算机执行的指令。在特定实施例中,实施例的操作可以由一个或多个计算机可读介质来执行,所述介质存储、体现和/或编码有计算机程序和/或具有存储的和/或编码的计算机程序。
79.存储器630(或存储器单元)存储信息。存储器630可以包括一个或多个非暂时性、有形、计算机可读和/或计算机可执行存储介质。存储器630的示例包括计算机存储器(例
如,ram或rom)、大容量存储介质(例如,硬盘)、可移动存储介质(例如,光盘(cd)或数字视频盘(dvd))、数据库和/或网络存储(例如,服务器)和/或其他计算机可读介质。
80.本公开的实施例涉及用于通过图像捕获模块的相机捕获目标的第一图像的系统及方法。图像捕获模块和滚筒附接到固定装置,并且目标附接到滚筒。所述方法还包括确定目标图像的横向间距距离中的横向像素的数量、基于横向像素的数量确定横向对象像素大小、以及基于横向对象像素大小确定滚筒编码器速率的步骤。滚筒编码器速率被编程到附接到滚筒的滚筒编码器中。所述方法还包括当目标围绕滚筒的轴线旋转时,由图像捕获模块的相机捕获目标的第二图像、确定第二图像的纵向间距距离中的纵向像素的数量、以及将横向像素的数量与纵向像素的数量进行比较的步骤。
81.在此,计算机可读非暂时性存储介质可以包括一个或多个基于半导体的或其他集成电路(ic)(例如,现场可编程门阵列(fpga)或专用ic(asic))、硬盘驱动器(hdd)、混合硬盘驱动器(hhd)、光盘、光盘驱动器(odd)、磁光盘、磁光驱动器、软盘、软盘驱动器(fdd)、磁带、固态驱动器(ssd)、ram驱动器、安全数字卡或驱动器、任何其他合适的计算机可读非暂时性存储介质,或其中两种或多种的任何合适组合(如适用)。在适当的情况下,计算机可读非暂时性存储介质可以是易失性、非易失性或易失性和非易失性的组合。
82.在此,除非另有明确说明或上下文另有说明,“或”具有包容性而非排他性。因此,在本文中,除非另有明确说明或上下文另有说明,“a或b”是指“a、b或两者”。此外,除非另有明确说明或上下文另有说明,“和”既是联合的又是多个的。因此,在本文中,除非另有明确说明或上下文另有说明,“a和b”是指“a和b,共同或分别”。
83.本公开的范围包括本领域普通技术人员将理解的对本文描述或图示的示例实施例的所有改变、替换、变化、变更和修改。本公开的范围不限于本文描述或图示的示例实施例。此外,尽管本公开将本文中的各个实施例描述并说明为包括特定组件、元件、特征、功能、操作或步骤,但是这些实施例中的任何一个可以包括任何组件、元件、特征、功能、操作的任何组合或排列,或本领域普通技术人员将理解的本文任何地方描述或说明的步骤。此外,在所附权利要求中,对适于、布置、能够、配置成、启用、可操作或可操作为以执行特定功能的设备或系统或设备或系统的组件的引用涵盖该设备,系统、组件,无论其或该特定功能是否被激活、开启或解锁,只要该设备、系统或组件如此适于、布置、能够、配置成、启用、可操作或可操作。此外,尽管本公开将特定实施例描述或说明为提供特定优势,但特定实施例可以不提供、部分或全部提供这些优势。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1