一种基于REC激光器阵列提高相干光通信系统性能的方法
一种基于rec激光器阵列提高相干光通信系统性能的方法
技术领域
1.本发明涉及空间相干激光通信领域,特别是一种基于rec激光器阵列提高相干光通信系统性能的方法。
背景技术:
2.空间激光通信相比于微波通信,拥有高通信速率,高光学带宽以及高保密性等优势,因此空间激光通信被越来越多的研究机构所关注。相对于传统的强度调制/直接探测的空间激光通信系统,基于相位调制/相干探测的空间激光通信系统可以更好地抑制背景噪声和热噪声,并显著提高通信接收机的灵敏度。因此,基于相位调制/相干探测的空间激光通信系统目前被广泛采用。
3.尽管相位调制/相干探测的方案拥有较高的接收机灵敏度,但由于激光器线宽展宽往往会带来相位噪声,这种相位噪声可以认为是维纳过程,其分布呈现高斯线型,通常会对基于相位调制的通信系统造成较为严重的干扰,降低通信的信噪比,因此在实际空间相干激光通信系统中,通常会采用窄线宽激光器以减小相位噪声的影响。
4.除了激光器相位噪声对系统的通信质量产生影响,激光在自由空间信道的传输还取决于指向误差,指向误差可能是由于机械不同轴性、跟踪系统的误差或系统中的机械振动引起的。通常情况下,指向误差由两部分组成,一部分是固定的视轴误差,另一部分是随机的抖动误差,虽然基于现有的跟瞄装置和指向算法可以实现不错的对准效果,从而消除视轴误差的影响,但是对于长距离空间激光通信,随机的抖动误差会导致光束中心和接收探测器中心的偏移,从而导致接收光强的减小,因此系统的信噪比会进一步地降低。
5.综上所述,在指向误差的存在,由于接收光强的进一步减小,原有线宽的激光器并不能满足系统通信所需的信噪比,需要更窄线宽的激光器去补偿相位噪声,提高信噪比和通信质量。通过研究表明,通信系统对激光器线宽的需求是动态地根据指向误差所调节的,在小指向误差下,通信系统的误码率对功率更加敏感,在大指向误差下,通信系统的误码率对激光器的线宽更加敏感。在指向误差存在的情况下,最佳状态是采用高功率窄线宽激光器,但由于工艺限制,激光器的功率越大越难实现窄线宽。
6.由于指向误差的存在以及激光器线宽和功率的制约条件,采用单个激光器作为本振光的效果较差。相较于单个光源,重构等效啁啾(reconstruction-equivalent-chirp,rec)激光器阵列的输出端口可以有多个,且每个端口可以定义成不同的线宽和功率,因此可以根据指向误差的返款来点亮对应的输出端口,且rec激光器阵列还拥有较高的波长精度以及较低的成本。
技术实现要素:
7.针对上述问题,本发明提供一种基于rec激光器阵列提高相干光通信系统性能的方法。基于当前的跟瞄系统和rec激光器阵列,本发明在接收端采用rec激光器阵列作为本振光模块,增加指向误差反馈系统,以指向误差作为反馈,并结合rec激光器阵列每个输出
端口的功率以及线宽参数,计算出最低误码率(bit-error-rate,ber),输出对应的端口作为本振光,该系统可以很好的补偿指向误差,从而改善空间相干激光通信系统的通信质量。
8.为实现本发明的目的,本发明所采用的技术方案如下:
9.本发明提出的一种基于rec激光器阵列提高相干光通信系统性能的方法,所述相干激光通信系统包括发射端和接收端,所述发射端包括窄线宽激光器、相位调制器、掺铒光纤放大器、发射端跟瞄子系统,所述接收端包括接收端跟瞄子系统、耦合器、光电探测器、数字信号处理模块、指向误差反馈系统、rec激光器阵列,所述接收端跟瞄子系统分别连接3db耦合器、指向误差反馈系统;所述指向误差反馈系统通过rec激光器阵列连接3db耦合器,所述指向误差反馈系统包括ccd探测器、指向误差计算模块、误码率计算模块、激光驱动程序模块;
10.一种基于rec激光器阵列提高相干光通信系统性能的方法,包括以下步骤:
11.步骤一、获取卫星发射端和地面接收端系统参数,结合掺铒光纤放大器倍数,发射端激光器功率,接收孔径大小,天顶角,束散角,星地链路距离,通信速率以及探测器相关参数,计算理论上接收端无指向误差下的接收信号光功率p
s0
;
12.步骤二、采用延时自外差法对rec激光器阵列的n个激光器出射端口进行线宽和功率进行测量,得到每个出射端口的线宽和功率,并存储到激光器驱动程序模块中,用于计算系统误码率;
13.步骤三、发射端跟瞄子系统和接收端跟瞄子系统完成瞄准工作后,发射端开启窄线宽激光器,依次经相位调制器调制、掺铒光纤放大器放大后进入空间信道;在接收端,接收信号光分为两路,一路进入3db耦合器,与rec激光器阵列的出射光进行混频;另一路由ccd探测器进行探测,对指向误差进行计算,并得到在指向误差影响下的理论接收信号光功率;
14.步骤四、根据步骤三得到的指向误差,结合激光器驱动程序模块存储的线宽和功率,得到rec激光器阵列的n个出射端口的理论误码率,激光器驱动程序模块点亮最小理论误码率对应的出射端口,该出射端口的出射光进入3db耦合器一端,与3db耦合器的另一端入射光进行混频,经由光电探测器进转换成电信号,进行数字信号处理。
15.进一步的,步骤一的具体方法如下:卫星发射端高度为h,地面接收端高度为h0,发射端激光器功率为p1,edfa增益倍数为g
edfa
,获取卫星束散角和天顶角分别为θd和ζ,得到理论上,仅考虑链路影响,无指向误差影响下的接收信号光功率为:
16.p
s0
=g
edfa
αp1ꢀꢀ
(1)
17.式(1)中,存在如下关系:
[0018][0019][0020]
l=(h-h0)sec(ζ)
ꢀꢀ
(4)
[0021]
式(2)中α是几何损耗,α
loss
为链路损耗系数,dr为接收孔径,w0为发射端光束宽度,w为接收信号光宽度。综合式(1)-(4)可以得到理论上无指向误差下的接收信号光功率ps0。
[0022]
进一步的,步骤二的具体方法如下:对rec激光器阵列的n个出射端口的激光器线
宽和功率进行测量,首先对每个端口的功率进行测量,依次点亮每个出射端口,用光功率计测得n个端口的出射光功率分别为:p
l1
,p
l2
,p
l3
,
……
p
ln
。进一步的用延时自外差法进行线宽测量,延时自外差法的基本原理是将一路入射光分成两路,将其中一路光用光纤延时后,使两路光拍频,经光电转换,在频谱分析仪上得到相拍后的光电流谱线,从延时光电流谱线确定出激光器线宽,由此得到rec激光器阵列的n个端口的线宽分别为:δv1,δv2,δv3,
……
δvn。进一步的,在激光器驱动程序中存储如表1所示数据用于后续误码率计算。
[0023]
表1
[0024]
出射端口123
…
n功率p
l1
p
l2
p
l3
…
p
ln
线宽δv1δv2δv3…
δvn[0025]
进一步的,步骤三的具体方法如下:发射端和接收端跟瞄子系统完成瞄准工作后,卫星发射终端开启窄线宽激光器,经由铌酸锂相位调制器调制,调制器的rf射频端口加载二进制伪随机码,相位调制器出射光经由掺铒光纤放大器放大后进入空间信道,接收信号光分成两路,一路进入3db耦合器,与rec本振激光器阵列出射光进行混频,光电探测器对接收光信号探测,转换为电信号,根据解调后二进制信号和原发射信号的每一位进行对比,求出实际误码率。进一步的,另一路光由ccd进行探测,假设ccd的光敏面中心和实际接收光束中心的距离为r,链路距离为l,由于地面跟瞄系统已完成瞄准工作,因此视轴误差可视为0,因此系统抖动误差即为指向误差,则指向误差大小为:
[0026][0027]
指向误差对光敏面中心和实际接收信号光中心的距离r的影响呈现瑞利分布:
[0028][0029]
由于激光器出射光束为高斯光束,接收信号光和r的关系呈现的分布为:
[0030][0031]
其中,w为接收信号光宽度,进一步的,结合步骤一得到的p
s0
在指向误差的影响下,理论接收信号光功率大小为:
[0032][0033]
进一步的,步骤四的具体方法如下:根据步骤三得到的指向误差影响下的理论接收信号光功率,传入激光器驱动程序中,再结合步骤二所测量的rec激光器阵列的每个端口的出射光功率p
l1
,p
l2
,p
l3
,
……
p
ln
和线宽δv1,δv2,δv3,
……
δvn,根据下面的公式可以计算出使用每个端口时的系统ber:
[0034][0035]
[0036]
其中,erfc(
·
)为互补误差函数,rd为接收端光电探测器响应度。p
l
为rec激光器阵列的每个端口的出射光功率,e为基本电荷数,id为光电探测器暗电流,δf为光电探测器带宽,kb为玻尔兹曼常数,t为光电探测器工作温度,fn为光电探测噪声系数,r
l
为光电探测器的负载电压,δv为rec激光器阵列的出射端口的激光线宽,ts为系统通信速率的倒数。则由公式(9)可以得出如表2所示的使用各个端口时的误码率:
[0037]
表2
[0038]
出射端口123
…
n功率p
l1
p
l2
p
l3
…
p
ln
线宽δv1δv2δv3…
δvn误码率ber1ber2ber3…
bern[0039]
比较并得出误码率最小的出射端口,激光器驱动程序点亮此端口与接收光进行相干,由光电探测器探测以及送入数字信号处理模块进行后续数字信号处理。
[0040]
有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果:
[0041]
(1)本发明采用可切换线宽和功率的rec激光器阵列,可以根据反馈的指向误差选择合适的出射端口,具有自适应的特征,一定程度上克服了激光器线宽和出射功率的制约关系,补偿了指向误差对通信系统带来的损失,改善通信质量,对空间相干激光通信技术的发展和应用具有重要意义;
[0042]
(2)本发明中的本振激光器阵列采用重构等效啁啾技术,具有低成本,高波长精度和切换多端口输出的优势;
[0043]
(3)本发明实现反馈的器件比较少,可以满足卫星小型化的需求。
附图说明
[0044]
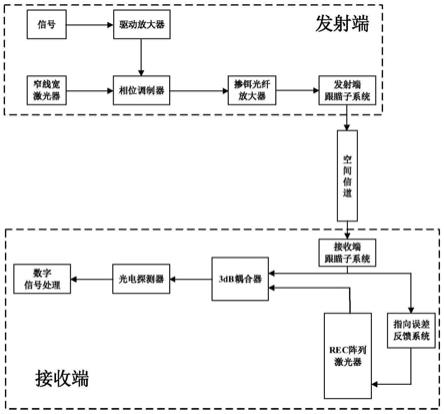
图1是本发明的发射端与接收端系统结构图;
[0045]
图2是本发明的基于指向误差反馈的rec激光器阵列系统流程图;
[0046]
图3是本发明的指向误差与半径偏移的概率密度曲线(pdf)示意图;
[0047]
图4是本发明的实施例中,采用单个激光器作为本振光和4路rec激光器阵列的每一路作为本振激光器后,误码率和指向误差的关系示意图。
具体实施方式
[0048]
下面结合附图对本发明的技术方案做进一步的详细说明,通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为本发明的限制。
[0049]
如图1所示是本发明的卫星发射端与地面接收端系统结构图,发射端采用二进制相移键控(binary phase shift keying,bpsk),空间信道受指向误差影响,接收端采用具有指向误差反馈系统的rec激光器阵列作为本振光进行相干探测。
[0050]
发射端,用于对信号进行调制并发射,由窄线宽激光器,信号,驱动放大器,铌酸锂相位调制器,掺铒光纤放大器以及发射端跟瞄子系统组成。当发射端开始工作时,窄线宽激光器出射光被相位调制器调制,二进制电信号经由驱动放大器加载到相位调制的射频端口,进行电光调制,相位调制器的出射光经由掺铒光纤放大器放大之后,进入跟瞄子系统进行校准,送入到空间信道中。
[0051]
接收端,用于接收信号光并解调,由接收端跟瞄子系统,指向误差反馈系统,rec激光器阵列,3db耦合器,光电探测器,以及数字信号处理模块组成。接收端跟瞄子系统完成校准工作之后,接收信号光被分为两路,一路进入3db耦合器和rec激光器阵列出射光进行相干混频,出射光由光电探测器转换为电信号,进行后续数字信号处理。另一路进入指向误差反馈系统,通过计算每路rec激光器阵列出射端口的误码率,比较出最低误码率出射端口,作为本振光出射。
[0052]
图2是指向误差反馈系统的结构图,所述指向误差反馈系统包括ccd探测器、指向误差计算模块、误码率计算模块、激光驱动程序模块。接收信号光一路进入指向误差反馈系统,由ccd探测器进行探测,进一步根据ccd探测的光斑偏移量计算指向误差大小,再将指向误差大小反馈到激光器驱动程序模块中,根据指向误差和rec激光器阵列的每个出射端口的线宽和功率计算理论误码率,将误码率最低的端口作为本振光出射,通过3db耦合器和接收信号光进行相干,进入信号处理模块。
[0053]
实施例:为了更深入地阐述本发明提出的一种基于rec激光器阵列提高相干光通信系统性能的方法,这里以使用地球同步卫星的bpsk空间相干激光通信系统为例说明该方法的效果。
[0054]
由于实际的空间相干激光通信系统的搭建涉及诸多方面的内容,利用实际系统进行测试的条件不足,因此采取数值模拟的方式来说明本发明所涉及的基于指向误差反馈的低成本rec可切换线宽本振激光器系统及方法的效果,通过模拟不同指向精度的卫星发射端出射信号光,测量不同指向误差,作为反馈量计算出每个出射端口的理论误码率,选取误码率最小的出射端口作为本振光。出于通用性考虑,采用地球同步卫星的空间相干激光通信系统,卫星高度为38000km,地面接收端高度为100m,通信系统采用bpsk调制方式。通信链路的主要参数设置如下:通信波长1550nm,速率2.5gbps,发射端激光功率为5mw,接收孔径为0.6m,卫星天顶角为0
°
,激光束散角为30μrad,edfa增益系数为100。假设接收端本振激光器为4路rec激光器阵列,由于工艺限制,其4路无法均做到10khz的窄线宽激光器,每路激光器的线宽以及出射光功率参数如表3所示:
[0055]
表3
[0056]
出射端口1234功率/mw151015线宽/khz10200300400
[0057]
作为对照实验,我们采取单个激光器作为本振光与4路rec激光器阵列对比,对照本振激光器的线宽为20khz,功率为2mw。
[0058]
假设地面接收端需要接收来自多个卫星发射终端所发出的信号光,并进行解调,且由于卫星跟瞄系统精度差别,三个卫星终端的指向误差大小各不相同,分别为2μrad,4μrad,8μrad,10μrad其接收光束中心偏离接收探测器中心的距离r的概率密度分布由图3给出,可以看到指向误差越大,其概率密度值越小,且曲线整体向右偏移。
[0059]
当指向误差为2μrad,4μrad,8μrad,10μrad使用rec激光器阵列的四个端口和单个激光器作为出射端的误码率如表4所示:
[0060]
表4
[0061][0062]
可以从表4中看出,当指向误差为2μrad时,使用单个激光器和端口1~4时的误码率(对数形式)分别为-10.89,-11.1,-11.63,-11.9,-12.04,使用端口4作为本振激光器时的误码率最小;当指向误差为4μrad时,使用单个激光器和端口1~4时的误码率(对数形式)分别为-9.829,-10.03,-10.36,-10.47,-10.39,使用端口3作为本振激光器时的误码率最小;当指向误差为6μrad时,使用单个激光器和端口1~4时的误码率(对数形式)分别为-8.484,-8.669,-8.803,-8.765,-8.484,使用端口2作为本振激光器时的误码率最小;当指向误差为10μrad时,使用单个激光器和端口1~4时的误码率(对数形式)分别为-6.012,-6.156,-6.072,-5.903,-5.538,使用端口1作为本振激光器时的误码率最小。
[0063]
图4进一步给出了在不同指向误差下,采用单个激光器和4个端口作为本振光的误码率曲线。从图4中可以看出,指向误差区间在1~3μrad时,采用端口4具有最低的误码率;当指向误差区间在3~5μrad时,采用端口3具有最低的误码率;当指向误差区间在5~8μrad时,采用端口2具有最低的误码率;当指向误差区间在8~10μrad时,采用端口1具有最低的误码率;而无论在哪个指向区间,以单个激光器作为本振光,都不能达到最低的误码率,由此可见,通过本发明所述的反馈系统,选择合适的rec激光器阵列出射端口作为本振光,可以使通信系统的误码率保持最低。
[0064]
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替代,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1