服务器装置、系统以及系统的动作方法与流程
1.本公开涉及服务器装置、系统以及系统的动作方法。
背景技术:
2.近年来,提出了利用无人机等无人飞行器来运输各种对象物的方法。与该技术关联地,在日本特开2018-203056中,公开有保存无人机运输的对象物的收容装置。
技术实现要素:
3.在飞行器运输对象物时,有时飞行动作受能够飞行的空间的大小制约,所以存在改善飞行器的飞行动作的余地。
4.以下,公开即使在受到飞行空间的制约的情况下也能够提高由飞行器进行的飞行动作的效率的服务器装置等。
5.本公开中的服务器装置具有:通信部;以及控制部,经由所述通信部将用于使多个飞行器进行飞行动作的指示发送给该多个飞行器,其中,所述飞行动作具有:第1工序,在比阳台的扶手靠内侧保持安装于位于该阳台的地面的对象物的第1绳状构件的第1飞行器和在比所述扶手靠外侧保持安装于所述对象物的第2绳状构件的第2飞行器以使所述第1绳状构件、所述第2绳状构件成预定的角度的方式上升而利用该第1绳状构件、该第2绳状构件将所述对象物悬挂吊起;以及第2工序,所述第1飞行器、所述第2飞行器以将用所述第1绳状构件、所述第2绳状构件悬挂的所述对象物运输到比所述扶手靠外侧的方式水平移动,所述预定的角度是在所述第1工序时所述第2绳状构件与所述扶手不发生干扰那样的角度。
6.本公开中的运输系统具有:多个飞行器;以及服务器装置,将用于使该多个飞行器进行飞行动作的指示发送给该多个飞行器,在所述系统中,所述飞行动作具有:第1工序,在比阳台的扶手靠内侧保持安装于位于该阳台的地面的对象物的第1绳状构件的第1飞行器和在比所述扶手靠外侧保持安装于所述对象物的第2绳状构件的第2飞行器以使所述第1绳状构件、所述第2绳状构件成预定的角度的方式上升而利用该第1绳状构件、该第2绳状构件将所述对象物悬挂吊起;以及第2工序,所述第1飞行器、所述第2飞行器以将用所述第1绳状构件、所述第2绳状构件悬挂的所述对象物运输到比所述扶手靠外侧的方式水平移动,所述预定的角度是在所述第1工序时所述第2绳状构件与所述扶手不发生干扰那样的角度。
7.根据本公开中的具有多个飞行器以及将用于使该多个飞行器进行飞行动作的指示发送到该多个飞行器的服务器装置的系统的动作方法,所述动作方法具有:第1工序,在比阳台的扶手靠内侧保持安装于位于该阳台的地面的对象物的第1绳状构件的第1飞行器和在比所述扶手靠外侧保持安装于所述对象物的第2绳状构件的第2飞行器以使所述第1绳状构件、所述第2绳状构件成预定的角度的方式上升而利用该第1绳状构件、该第2绳状构件将所述对象物悬挂吊起;以及第2工序,所述第1飞行器、所述第2飞行器以将用所述第1绳状构件、所述第2绳状构件悬挂的所述对象物运输到比所述扶手靠外侧的方式水平移动,所述预定的角度是在所述第1工序时所述第2绳状构件与所述扶手不发生干扰那样的角度。
8.根据本公开,即使在受到飞行空间的制约的情况下,也能够提高由飞行器进行的飞行动作的效率。
附图说明
9.下面将参照附图说明本发明的示例性实施例的特征、优点以及技术和工业上的意义,其中相同的符号表示相同的元件,其中:
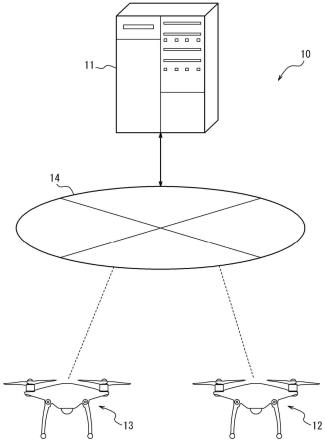
10.图1是示出运输系统的结构例的图。
11.图2a是说明运输系统的动作的图。
12.图2b是说明运输系统的动作的图。
13.图3是示出服务器装置的结构例的图。
14.图4是示出飞行器的结构例的图。
15.图5是示出运输系统的动作例的序列图。
16.图6是说明变形例中的飞行器的动作的图。
17.图7是说明变形例中的飞行器的动作的图。
18.图8a是说明飞行器的动作的图。
19.图8b是说明飞行器的动作的图。
20.图8c是说明飞行器的动作的图。
21.图8d是说明飞行器的动作的图。
22.图9a是示出运输系统的动作例的序列图。
23.图9b是示出运输系统的动作例的序列图。
具体实施方式
24.以下,说明实施方式。
25.图1是示出本实施方式中的运输系统的结构例的图。如图1所示,运输系统10具有服务器装置11和通过服务器装置11的控制来运输对象物的飞行器12以及13。服务器装置11和飞行器12以及13经由网络14能够相互通信信息地连接。服务器装置11例如是属于云计算系统或者其它计算系统,安装各种功能的服务器。飞行器12以及13是无人机,该无人机利用电力等来得到动力而使多个旋转翼旋转,从而产生升力以及推力,在空中飞行。飞行器12以及13在本实施方式中接受来自服务器装置11的指示,通过自主控制进行飞行,但也可以适当地通过远程操作进行飞行。飞行器12以及13如之后详述那样,具有用于运输对象物的机构。网络14例如是因特网,但包括自组网络、lan(local area network,局域网)、man(metropolitan area network,城域网)或其它网络或者它们的任意的组合。
26.图2a、2b是示出本实施方式中的飞行器12以及13所进行的对象物的运输动作的概要的图。飞行器12以及13将配置于预定空间的对象物运输到预定空间外。在本实施方式中,预定空间是包括公寓、办公楼等的综合设施中的阳台的地面和扶手墙壁所包围的空间。在图2a、2b中,示出综合设施的阳台20的示意性的剖视图。作为预定空间的阳台空间21是与和阳台20的地面的尺寸以及形状、扶手墙壁的高度相应的容积对应的空间。阳台空间21例如具有如占据一边为几十~几百cm的长方体空间那样的尺寸以及形状。对象物例如是具有20~90升左右的容积的聚乙烯等通用树脂制的垃圾袋22。飞行器12以及13保持贯穿垃圾袋22
的绳状构件23的两端,协作地利用绳状构件23将垃圾袋22悬挂并运输。绳状构件23例如是尼龙、聚酯等化学纤维制的绳索、棉、麻等天然纤维制的绳索或者金属制的线或者链条等。飞行器12以及13具备能够输出用于上述飞行动作的升力的马达等动力装置,所以具有某种程度的大小的机体。飞行器12以及13例如具有如占据一边为几十~百几十cm的长方体空间那样的尺寸以及形状。于是,被阳台空间21的大小制约,有时无法进行用于飞行器12以及13同时进入到阳台空间21并使绳状构件23贯穿垃圾袋22的作业。因而,在本实施方式中,为了能够使飞行器12以及13协作地运输垃圾袋22,服务器装置11单独地控制飞行器12以及13的飞行动作。
27.在本实施方式中,服务器装置11将用于执行如下飞行动作的指示发送到飞行器12以及13。飞行器12朝向配置于作为预定空间的阳台空间21的作为对象物的垃圾袋22对贯穿工具施力,然后保持贯穿工具所附带的绳状构件23的贯穿垃圾袋22的第1部位和未贯穿垃圾袋22的第2部位,向阳台空间21外飞行。然后,飞行器13在阳台空间21外进行待机,从飞行器12收取绳状构件23的第1以及第2部位的任意一方。然后,飞行器12以及13分别保持绳状构件23的第1以及第2部位的任意一方以及另一方地飞行,从而利用绳状构件23牵引、悬挂垃圾袋22,运输到阳台空间21外。这样,即使飞行器12以及13无法同时进入到阳台空间21,飞行器12以及13也能够协作地将垃圾袋22运输到阳台空间21外。
28.图3示出服务器装置11的结构例。服务器装置11具备控制部31、存储部32、通信部33、输入部35以及输出部36。服务器装置11例如是属于云计算系统或者其它计算系统,作为安装各种功能的服务器发挥功能的服务器计算机。服务器装置11也可以是能够相互通信信息地连接地进行协作动作的一个以上的服务器计算机。
29.控制部31包括一个以上的处理器、一个以上的专用电路或者它们的组合。处理器例如是cpu(central processing unit,中央处理单元)等通用处理器或者专门进行特定的处理的gpu(graphics processing unit:图形处理单元)等专用处理器。专用电路例如是fpga(field-programmable gate array,现场可编程门阵列)、asic(application specific integrated circuit,专用集成电路)等。控制部31一边控制服务器装置11的各部分,一边执行与服务器装置11的动作相关的信息处理。
30.存储部32例如包括作为主存储装置、辅助存储装置或者高速缓存存储器发挥功能的一个以上的半导体存储器、一个以上的磁存储器、一个以上的光存储器或者它们中的至少两个种类的组合。半导体存储器例如是ram(random access memory,随机存取存储器)或者rom(read only memory,只读存储器)。ram例如是sram(static ram,静态随机存取存储器)或者dram(dynamic ram,动态随机存取存储器)。rom例如是eeprom(electrically erasable programmable rom,电可擦可编程随机存取存储器)。存储部32存储用于服务器装置11的动作的信息和通过服务器装置11的动作得到的信息。
31.通信部33包括一个以上的通信用接口。通信用接口例如是lan接口。通信部33接收用于服务器装置11的动作的信息,另外发送通过服务器装置11的动作得到的信息。服务器装置11利用通信部33连接于网络14,经由网络14而与其它装置进行信息通信。
32.输入部35包括一个以上的输入用接口。输入用接口例如是物理键、静电电容键、指向器件、与显示器一体地设置的触摸屏或者受理声音输入的麦克风。输入接口进而也可以包括将摄像图像或者图像代码取入的摄像机或者ic(integrated circuit,集成电路)读卡
器。输入部35受理输入用于服务器装置11的动作的信息的操作,将所输入的信息发送到控制部31。
33.输出部36包括一个以上的输出用接口。输出用接口例如是显示器或者扬声器。显示器例如是lcd(liquid crystal display,液晶显示器)或者有机el(electro-luminescence,电致发光)显示器。输出部36输出通过服务器装置11的动作得到的信息。
34.服务器装置11的功能通过利用控制部31所包含的处理器来执行控制程序而实现。控制程序是如下程序:用于通过使计算机执行服务器装置11的动作所包含的步骤的处理,从而使计算机实现与该步骤的处理对应的功能。即,控制程序是用于使计算机作为服务器装置11发挥功能的程序。
35.图4示出飞行器12的结构例。以图4中的飞行器12为例的说明只要没有特别说明,也适用于飞行器13。飞行器12具备控制部41、存储部42、通信部43、定位部44、输入部45、输出部46、探测部47以及保持机构48。
36.控制部41包括一个以上的处理器、一个以上的专用电路或者它们的组合。处理器是cpu等通用处理器或者专门进行特定的处理的专用处理器。专用电路例如是fpga或者asic。控制部41一边控制控制装置40的各部分,一边执行与飞行器12的动作相关的信息处理。
37.存储部42例如包括作为主存储装置、辅助存储装置或者高速缓存存储器发挥功能的一个以上的半导体存储器、一个以上的磁存储器、一个以上的光存储器或者它们中的至少两个种类的组合。半导体存储器例如是ram或者rom。ram例如是sram或者dram。rom例如是eeprom。存储部42执行与飞行器12的动作相关的信息处理,并且存储用于飞行器12的动作的信息和通过飞行器12的动作得到的信息。
38.通信部43包括一个以上的通信用接口。通信用接口例如是与lte(long term evolution,长期演进)、4g(4th generation,第四代)或者5g(5th generation,第五代)等移动通信标准对应的接口。通信部43接收用于控制部41的动作的信息,另外发送通过控制部41的动作得到的信息。控制部41利用通信部43经由移动体通信的基站连接于网络14,经由网络14而与其它装置进行信息通信。
39.定位部44包括一个以上的gnss(global navigation satellite system,全球导航卫星系统)接收器。作为gnss,例如包括gps(global positioning system,全球定位系统)、qzss(quasi-zenith satellite system,准天顶卫星系统)、beidou、glonass(global navigation satellite system,全球导航卫星系统)以及galileo中的至少任意一个。定位部44获取飞行器12的位置信息。
40.输入部45包括一个以上的输入用接口。输入用接口是将摄像图像取入的摄像机、物理键、静电电容键、指向器件、与显示器一体地设置的触摸屏或者受理声音输入的麦克风。输入接口进而或者也可以包括ic读卡器。输入部45受理输入用于控制部41的动作的信息的操作,将所输入的信息发送到控制部41。
41.作为输出部46,包括一个以上的输出用接口。输出用接口例如是显示器或者扬声器。显示器例如是lcd或者有机el显示器。输出部46输出通过控制部41的动作得到的信息。
42.探测部47具有探测飞行器12的运动状态以及飞行器12的周围的状况的传感器类。飞行器12的运动状态是飞行速度、高度、姿势的倾斜度等,作为探测这些信息的传感器类,
包括速度传感器、高度传感器、角速度传感器等。飞行器12的周围的状况是有无障碍物等其它物体、与其它物体的距离等,作为探测这些信息的传感器类,包括图像传感器、距离传感器等。探测部47将基于传感器类的探测结果发送到控制部41。
43.保持机构48具有用于保持用于贯穿垃圾袋22的贯穿工具的机构及其控制电路。贯穿工具是具有能够贯穿垃圾袋22的刚性和锐利的前端部的棒状构件,例如是长度十几cm~几十cm的金属制或者塑料制的矛。保持机构48根据来自控制部41的指示而保持或者解除贯穿工具。保持机构48例如具有用于吸附金属制的贯穿工具而保持的电磁体及其控制电路或者能够利用致动器进行开闭地把持贯穿工具的臂部对及其控制电路。或者,保持机构48也可以具有发射机构,该发射机构通过预先装填贯穿工具而能够保持贯穿工具,根据控制部41的指示,利用压缩空气、弹性构件的弹力等对贯穿工具施力而发射贯穿工具。但是,在飞行器13中,保持机构48也可以不具有贯穿工具的发射机构。另外,保持机构48能够装卸地保持前端部被安装在贯穿工具的绳状构件23的终端部。保持机构48例如既可以利用电磁体来吸附或者解除绳状构件23的终端部所附带的金属片,也可以利用臂部对来把持或者解除绳状构件23的终端部。保持机构48也可以具有卷轴,该卷轴固定绳状构件23的终端部而卷绕绳状构件23。
44.飞行器12的飞行动作以及其它动作通过由飞行器12的动力装置、各种机构根据来自控制部41的指示进行动作而实现。控制部41发出的指示通过利用控制部41所包含的处理器来执行控制程序而生成。另外,控制部41的一部分或者全部的功能也可以通过控制部41所包含的专用电路来实现。
45.图5是示出运输系统10的动作次序的序列图。图5示出由服务器装置11、飞行器12以及13进行的关联动作的次序。在图5中的动作中的服务器装置11与包括飞行器12以及13的其它装置交换各种信息时,服务器装置11的控制部31经由通信部33将信息发送到其它装置,另外从其它装置接受信息。在飞行器12以及13与包括服务器装置11的其它装置交换信息时,飞行器12以及13的控制部41经由通信部43从其它装置接受信息,另外将信息发送到其它装置。在服务器装置11执行各种信息处理时,控制部31使用保存于存储部32的信息来执行处理。在飞行器12以及13执行飞行等动作时,飞行器12以及13的控制部41生成用于各种动作的指示而输出,动力装置以及各种机构根据该指示进行动作,从而实现飞行器12以及13的各种动作。
46.图5的次序例如在综合设施的居住者等请求垃圾袋22的回收时执行。例如,居住者等将垃圾袋22放置于阳台空间21的预定的位置,利用智能手机等通用的通信终端或者设置于综合设施等的专用的通信终端将垃圾袋22的运输请求连同设置有垃圾袋22的阳台空间21的信息一起发送到服务器装置11。阳台空间21的信息是确定阳台空间21的信息,是确定综合设施中的住户等的信息、阳台空间21的位置信息等。于是,服务器装置11在步骤s500中接受阳台空间21的信息和运输请求。
47.在步骤s502中,服务器装置11根据阳台空间21的信息,生成面向飞行器12以及13的飞行指示。在服务器装置11的存储部32中,针对设置于综合设施的每个阳台而预先保存阳台空间21的形状、尺寸、空间坐标等信息、放置垃圾袋22的位置的信息以及飞行器12以及13的停机场所的信息。飞行器12以及13的停机场所例如设置于综合设施的屋顶或者用地内的任意位置。控制部31按照任意的算法决定飞行器12以及13各自的飞行的目标和从停机场
所至目标为止的飞行路径,生成包括目标、飞行路径以及飞行过程中的各种动作的飞行指示。
48.在步骤s504以及s506中,服务器装置11将飞行指示分别发送给飞行器12以及13。飞行器12以及13分别接受飞行指示。
49.飞行器12以及13根据飞行指示分别执行步骤s508以后的动作。在此,示出飞行器12以及13根据在步骤s504、s506中从服务器装置11一次地接受的飞行指示来执行各自的动作的例子。但是,服务器装置11也可以对飞行器12以及13分别在适当地分割的定时发送飞行指示。例如,也可以是服务器装置11从飞行器12以及13分别随时接受表示此时的动作的执行状况的信息,生成用于接下来的动作的飞行指示,将所生成的飞行指示分别发送到飞行器12以及13,飞行器12以及13分别随时执行与飞行指示相应的动作。
50.一并参照图2a、2b,说明步骤s508~s514中的飞行器12的动作。
51.在步骤s508中,飞行器12飞行至目标,捕捉对象物。目标例如是阳台空间21内的任意的空间坐标。当飞行器12进入到阳台空间21并到达目标时,控制部41利用探测部47来捕捉垃圾袋22。控制部41根据来自探测部47的探测结果导出垃圾袋22的存在和直至垃圾袋22为止的距离,从而捕捉垃圾袋22。例如,当探测部47的图像传感器对飞行器12的周围进行摄像而将摄像图像发送到控制部41时,控制部41对摄像图像进行包括图案辨识的图像处理,检测垃圾袋22的图像。另外,当探测部47的距离传感器测量直至垃圾袋22为止的距离而将测量结果发送到控制部41时,控制部41根据测量结果导出直至垃圾袋22为止的距离。飞行器12利用保持机构48保持贯穿工具60和对贯穿工具60附加有一个端部的绳状构件23的另一端部。
52.在步骤s510中,飞行器12朝向作为对象物的垃圾袋22对贯穿工具60施力,使贯穿工具60贯穿对象物。
53.例如,飞行器12在保持利用保持机构48保持贯穿工具60的状态下利用一定以上的推进力进行移动,从而对贯穿工具60施力。此时,飞行器12按照如贯穿工具60的前端刺入到垃圾袋22那样的方向以及角度移动。此时控制部41例如根据摄像图像以及距离信息,以使贯穿工具60从垃圾袋22中的没有内含物的可能性高的密封口附近例如图像辨识出的密封口刺入到任意的距离内的位置的方式,决定移动的方向以及角度。关于基于飞行器12的推进力,考虑垃圾袋22的原材料的刚性和贯穿工具60的刚性预先任意地设定。由此,贯穿工具60的前端刺破垃圾袋22而贯穿垃圾袋22。
54.另外,飞行器12利用设置于保持机构48的发射机构来发射贯穿工具60,对贯穿工具60施力。此时,飞行器12在滞空在如所发射的贯穿工具60的前端刺入到垃圾袋22那样的任意的位置的状态下将贯穿工具60朝向垃圾袋22发射。关于飞行器12滞空的位置,考虑垃圾袋22的原材料的刚性、贯穿工具60的刚性以及发射机构对贯穿工具60附加的力的大小而预先任意地设定。此时控制部41例如根据摄像图像以及距离信息,以使贯穿工具60刺入到垃圾袋22中的没有内含物的可能性高的密封口附近的方式决定滞空的位置。由此,贯穿工具60的前端刺破垃圾袋22,贯穿垃圾袋22。
55.在步骤s512中,飞行器12回收贯穿作为对象物的垃圾袋22的贯穿工具60。例如,飞行器12使保持机构48解除贯穿工具60,使贯穿工具60的前端移动至能够利用保持机构48再次保持的位置。或者,飞行器12在通过使保持机构48发射贯穿工具60而解除贯穿工具60之
后,使贯穿工具60的前端移动至能够利用保持机构48再次保持的位置。然后,飞行器12利用保持机构48来保持贯穿工具60的贯穿垃圾袋22的端部即前端。然后,飞行器12移动至用于从垃圾袋22抽出贯穿工具60的位置,回收贯穿工具60。飞行器12为了再次保持贯穿工具60而移动的位置、为了保持贯穿工具60并使贯穿工具60贯穿垃圾袋22而移动的位置例如由控制部41根据预先提供的贯穿工具60的长度的信息、图像辨识出的垃圾袋22的形状、位置等导出。
56.步骤s510~s512在飞行器12保持绳状构件23的终端部的状态下被执行。因而,当执行步骤s512而回收贯穿工具60时,飞行器12成为保持贯穿垃圾袋22的贯穿工具60和绳状构件23的终端部的状态。即,飞行器12成为保持贯穿了绳状构件23的垃圾袋22的前端部侧的部位和未贯穿垃圾袋22的终端部侧的部位的状态。
57.另一方面,飞行器13在图5的步骤s509中,根据飞行指示飞行至目标。目标例如是阳台空间21附近的任意的位置。由于阳台空间21的大小的制约,在飞行器12位于阳台空间21内时,飞行器13不进入到阳台空间21。飞行器13当到达阳台空间21附近的目标时,以滞空的方式待机。
58.说明步骤s514~s518中的飞行器12以及13的动作。
59.在步骤s514中,飞行器12为了与飞行器13合流而移动至飞行器13滞空的位置。此时,飞行器12在保持贯穿垃圾袋22的绳状构件23的前端部侧的部位和终端部侧的部位的状态下,不使垃圾袋22的位置移动地飞行。因而,飞行器13滞空的位置是在绳状构件62的长度的范围内飞行器12能够到达的位置。飞行器12根据从服务器装置11预先或者随时发送的信息获取飞行器13待机的位置。飞行器12飞行至阳台空间21外的飞行器13滞空的位置而与飞行器13接近,直至任意地决定的预定距离为止,从而飞行器12以及13合流。
60.在步骤s516中,飞行器12将绳状构件23的一个端部交接给飞行器13。然后,飞行器12将贯穿工具60交接给飞行器13。飞行器12利用保持机构48解除贯穿工具60。另一方面,飞行器13通过利用保持机构48来保持贯穿工具60,从而接收贯穿工具60。由此,贯穿绳状构件23的垃圾袋22的前端部侧的部位从飞行器12交接给飞行器13。或者,飞行器12也可以将绳状构件23的终端部交接给飞行器13。在该情况下,飞行器12利用保持机构48来解除绳状构件23的终端部。另一方面,飞行器13通过利用保持机构48来保持绳状构件23的终端部,从而接收绳状构件23的终端部。由此,未贯穿绳状构件23的垃圾袋22的终端部侧的部位从飞行器12交接给飞行器13。
61.在步骤s518中,飞行器12以及13从作为预定空间的阳台空间21运输作为对象物的垃圾袋22。飞行器12以及飞行器13如图2b所示使任意一方保持绳状构件23的贯穿垃圾袋22的前端部侧的部位、另一方保持绳状构件23的未贯穿垃圾袋22的终端部侧的部位地移动,从而利用绳状构件62牵引、悬挂垃圾袋22,运输到阳台空间21的外部。这样,飞行器12以及13例如将垃圾袋22运输至预定的收集场所。
62.根据如以上那样的通过服务器装置11的控制执行的飞行器12以及13的动作,即使在受到阳台空间21的大小的制约的情况下,飞行器12以及13也能够协作地运输垃圾袋。
63.图6是说明变形例中的飞行器12的动作的图。图6中的动作在图5的步骤s508与步骤s510之间执行。
64.根据阳台空间21的形状,有时在垃圾袋22最初放置的位置80与易于确保用于飞行
器13滞空的空间的侧的位置81之间存在某种程度的距离。在该情况下,即使在位置80处飞行器12使绳状构件23贯穿了垃圾袋22,受到绳状构件23的长度的制约,飞行器12也有可能会无法移动至能够与飞行器13合流的位置。或者,阳台空间21的形状以及尺寸有时呈现如在位置80处无法确保对于用于飞行器12使贯穿工具60贯穿垃圾袋22的飞行动作足够的大小的空间、而在位置81处能够确保那样的方案。因而,在变形例中,飞行器12还具备把持垃圾袋22的把持机构。把持机构例如具有利用根据来自控制部41的指示进行动作的致动器进行开闭而能够把持垃圾袋22的臂部对及其控制电路。飞行器12把持垃圾袋22而使该垃圾袋22从位置80牵引移动至位置81。通过这样做,能够进行步骤s510以后的动作,能够由飞行器12以及13进行垃圾袋22的运输。
65.进而在优选的方案中,在与阳台空间21对应的阳台20的地面配备具备移动机构的载置台82。载置台82例如构成为能够利用车轮在地面滑行。通过这样做,飞行器12能够利用更小的推进力使垃圾袋22从位置80移动到位置81。
66.图7是说明另一变形例的图。在图7中,示出综合设施的阳台20的示意性的剖视图。在阳台20的扶手墙壁92设置有飞行器12能够通过且垃圾袋22能够通过的尺寸及形状的开口90。在开口90处例如设置能够开闭的门,构成为探测到飞行器12的接近而门被打开。在飞行器12从阳台空间21移动而与在阳台空间21外待机的飞行器13合流时(图5的步骤s514),飞行器12通过开口90。进而,飞行器12以及13在利用绳状构件23牵引垃圾袋22而运输时(图5的步骤s518),经由开口90从阳台空间21运输垃圾袋22。在从扶手墙壁的上方牵引垃圾袋22而运输的情况下,垃圾袋22与扶手墙壁92发生干扰,由于摩擦而给垃圾袋22的运输带来障碍、或者垃圾袋22有可能会发生破损,但通过经由开口90运输垃圾袋22,能够避免该情况。
67.《实施例》
68.在上述实施方式中,在飞行器12以及13都位于比阳台20的扶手靠外侧的位置的状态下开始由绳状构件23进行垃圾袋22的牵引,将垃圾袋22运输到阳台空间21外,进而运输到比阳台20的扶手靠外侧。以下的实施例涉及从飞行器12以及13的一方(例如飞行器12)位于比阳台20的扶手靠内侧的位置,另一方(例如飞行器13)位于外侧的位置的状态开始垃圾袋22的牵引的情况。
69.图8a~8c是示出实施例中的飞行器12以及13运输垃圾袋22的动作的例子的图。
70.在图8a中,示出飞行器12以及13保持端部分别安装在垃圾袋22的绳状构件100以及101的靠近自由端的部位的状态。此时,仅飞行器12位于比阳台20的扶手104靠内侧120的上升开始位置107。飞行器13位于比扶手104靠外侧121的上升开始位置108。该状态通过如下方式实现:利用图5所示的动作使绳状构件23贯穿垃圾袋22,飞行器12以及13分别保持其两端的部位,飞行器12以及13分别移动到上升开始位置107以及108。在该情况下,绳状构件23的靠近飞行器12处对应于绳状构件100,靠近飞行器13处对应于绳状构件101。或者,也可以通过与图5以及图6所示的动作不同的动作将绳状构件100、101安装于垃圾袋22。例如,综合设施的居住者等预先使一个绳状构件贯穿希望回收的垃圾袋22、或者固定一对绳状部各自的端部,将运输请求发送到服务器装置11。然后,飞行器12以及13可以交替地进入到比阳台20的扶手104靠内侧120,分别利用保持机构48来保持绳状构件100、101的靠近自由端的部位,从而达到图8a的状态。
71.在该实施例中,接受到来自服务器装置11的飞行指示的飞行器12以及13执行如下飞行动作。在比扶手104靠内侧120处保持安装于作为位于阳台20的地面103的对象物的垃圾袋22的第1绳状构件100的飞行器12和在比扶手104靠外侧121处保持安装于垃圾袋22的第2绳状构件101的飞行器13以使绳状构件100、101成预定的角度θ的方式,从各自的上升开始位置107以及108上升,利用绳状构件100、101悬挂并吊起垃圾袋22。此时,绳状构件100以及101在安装于垃圾袋22的安装位置122处所成的角度θ是绳状构件101与扶手104不发生干扰那样的角度。这样,飞行器12以及13将用绳状构件100以及101悬挂的垃圾袋22运输到比扶手104靠外侧121。
72.在飞行器12以及13悬挂垃圾袋22时,如果绳状构件100、101所成的角度过宽,则有可能绳状构件101与扶手104发生干扰而绳状构件101产生损伤或者对飞行器13造成过负荷,但通过设为如绳状构件101与扶手104不发生干扰那样的角度θ,能够边降低上述可能性,边将垃圾袋22从扶手104的内侧120运输到外侧121。
73.接着,说明该实施例中的飞行器12以及13的具体的动作。
74.首先,在飞行器12以及13在图5的步骤s516中分别保持绳状构件100以及101之后,分别移动到上升开始位置107以及108,从而图8a的状态成立。
75.或者,当垃圾袋22安装有绳状构件100以及101的情况下,执行图9a所示的次序。图9a涉及飞行器12以及13分别保持绳状构件100以及101,分别移动到上升开始位置107以及108而达到图8a的状态为止的动作。以下,参照图8a~图8d,说明图9a的次序。
76.图9a的次序例如在综合设施的居住者等请求垃圾袋22的回收时执行。例如,居住者等将垃圾袋22放置于阳台20的地面103的预定的位置,将绳状构件100以及101安装于垃圾袋22。关于安装方法,能够采用任意的方法。例如,在绳状构件100以及101的端部预先附带有用于安装于垃圾袋22的器具,居住者等使用该器具将绳状构件100以及101安装于垃圾袋22。上述器具是钩挂垃圾袋22的抓取的部分或者贯穿垃圾袋22而钩挂的挂钩、具有能够紧贴于垃圾袋22的粘着部或者粘接部的器具、能够收容及保持垃圾袋22的网、将垃圾袋22进行打结而保持的带子等。或者,居住者等也可以通过在绳状构件100以及101的端部附近将垃圾袋22的密封部附近进行捆扎,从而将绳状构件100以及101安装于垃圾袋22。居住者等利用智能手机等通用的通信终端或者设置于综合设施等的专用的通信终端,将垃圾袋22的运输请求与设置有垃圾袋22的阳台空间21的信息一起发送到服务器装置11。于是,服务器装置11在步骤s1100中接受阳台空间21的信息和运输请求。
77.在步骤s1102中,服务器装置11根据阳台空间21的信息,生成面向飞行器12以及13的飞行指示。控制部31按照任意的算法决定飞行器12以及13各自的飞行的目标和从停机场所至目标为止的飞行路径,生成包括目标、飞行路径以及飞行过程中的各种动作的飞行指示。
78.在步骤s1104以及s1106中,服务器装置11将飞行指示分别发送给飞行器12以及13。飞行器12以及13分别接受飞行指示。
79.飞行器12以及13根据飞行指示分别执行步骤s1108以及s1109以后的动作。在此,示出飞行器12以及13根据在步骤s1104以及s1106中从服务器装置11一次地接受的飞行指示来执行各自的动作的例子。但是,服务器装置11也可以对飞行器12以及13分别在适当地分割的定时发送飞行指示。例如,也可以是服务器装置11从飞行器12以及13分别随时接受
表示动作的执行状况或者周围的状况的信息,生成用于接下来的动作的飞行指示,将所生成的飞行指示分别发送到飞行器12以及13,飞行器12以及13分别随时执行与飞行指示相应的动作。
80.在步骤s1108中,飞行器12飞行至目标,捕捉绳状构件。目标例如是比阳台20的扶手104靠内侧120的任意的空间坐标。当飞行器12到达目标时,控制部41利用探测部47来捕捉绳状构件100。控制部41根据来自探测部47的探测结果导出绳状构件100的存在和直至绳状构件100为止的距离,从而捕捉绳状构件100。例如,控制部41对基于探测部47的图像传感器得到的摄像图像进行包括图案辨识的图像处理,检测绳状构件100的图像。绳状构件100例如通过对自由端附近的部位附加任意的颜色、记号等而被识别。另外,控制部41根据利用探测部47的距离传感器得到的测量结果,导出直至绳状构件100为止的距离。
81.在步骤s1110中,飞行器12保持绳状构件。例如,飞行器12使绳状构件100的自由端附近的应保持的部位移动至能够用保持机构48保持的位置。然后,飞行器12利用保持机构48来保持绳状构件100。例如,绳状构件100中的应保持的部位根据颜色、记号等确定,控制部41通过图像处理来识别应保持的部位,使保持机构48进行动作而保持绳状构件100。或者,也可以在绳状构件100中的应保持的部位处预先安装金属构件,利用保持机构48的电磁体吸附。
82.在步骤s1112中,飞行器12退避至比扶手104靠外侧121的任意的位置,在该位置处滞空。
83.在步骤s1114中,飞行器13移动至比扶手104靠内侧120,捕捉绳状构件。飞行器13的控制部41与步骤s1108中的飞行器12的控制部41的动作同样地进行动作。
84.在步骤s1116中,飞行器13保持绳状构件。例如,飞行器13使绳状构件101的自由端附近的部位移动至能够用保持机构48保持的位置。飞行器13的控制部41与步骤s1110中的飞行器12的控制部41的动作同样地进行动作,使保持机构48保持绳状构件101。绳状构件101中的应保持的部位构成为能够通过颜色、记号、金属构件的附加等来识别。
85.在步骤s1118中,飞行器13移动至上升开始位置。飞行器13的上升开始位置108是在比扶手104靠外侧121处在绳状构件101的长度的范围内能够到达的空间坐标。上升开始位置108由服务器装置11的控制部31导出,在步骤s1106中包含于飞行指示而被发送到飞行器13。
86.在步骤s1120中,飞行器12移动至上升开始位置。飞行器12的上升开始位置107是在比扶手104靠内侧120处在绳状构件100的长度的范围内能够到达的空间坐标。上升开始位置107由服务器装置11的控制部31导出,在步骤s1104中包含于飞行指示而被发送到飞行器12。
87.在上述次序中,由于比阳台20的扶手104靠内侧120的阳台空间21的大小的制约,无法执行飞行器12以及13同时分别捕捉绳状构件100以及101而保持的动作,所以飞行器12先捕捉绳状构件100而保持,移动到上升开始位置107。但是,也可以设为在飞行器13先捕捉绳状构件101而保持并移动到上升开始位置108之后,飞行器12捕捉绳状构件100而保持并移动到上升开始位置107的次序。
88.在图8a中,飞行器12以及13的上升开始位置107以及108满足如下各条件。即,服务器装置11的控制部41在生成向飞行器12以及13的飞行指示时,使用阳台20的尺寸以及形
状、地面103的尺寸以及形状、扶手104的尺寸、形状以及位置、上层的阳台的底面的尺寸、形状以及位置、垃圾袋22的位置及设想的大小以及重量、飞行器12以及13的尺寸、形状、推进力等信息,通过任意的算法来求出满足各条件的上升开始位置107以及108的空间坐标。此时使用的信息预先保存于存储部32。首先,飞行器12的上升开始位置107是在比扶手104靠内侧120处从绳状构件100以及101安装于垃圾袋22的安装位置122起处于上方的在绳状构件100的长度的范围内能够到达的距离的位置。另外,飞行器13的上升开始位置108是在比扶手104靠外侧121处从安装位置122起处于上方的在绳状构件101的长度的范围内能够到达的距离的位置。然后,上升开始位置107以及108被决定为在安装位置122处使绳状构件100以及101所成的角度θ满足如下条件。即,角度θ是如在飞行器12位于上升开始位置107时与建筑物的外壁124以及上方的构造物也就是说上层的阳台的底面125不发生干扰、在飞行器13位于上升开始位置108时绳状构件101与扶手104不发生干扰那样的角度。进而,角度θ是如在飞行器12以及13在绳状构件100以及101的延长线上分别产生推进力时推进力的合力在铅垂方向朝上作用而能够悬挂并吊起垃圾袋22那样的角度。在飞行器12以及13的性能等同且产生的推进力同等的情况下,以使2架飞行器的推进力的合力超过1架飞行器的推进力的方式,决定角度θ。上述角度θ是绳状构件100以及101相对于铅垂方向朝上所成的角度分别小于60度时的这些角度之和,所以小于120度。
89.绳状构件100以及101各自的长度和分别被飞行器12以及13保持的部位的位置被预先决定为对应的上升开始位置107以及108满足上述条件。至少绳状构件101的长度和飞行器13保持的部位的位置被决定为飞行器13的上升开始位置108配置在比扶手104靠外侧121。在飞行器12使绳状构件23贯穿垃圾袋22,将靠近飞行器12的部分设为绳状构件100,将靠近飞行器13的部分设为绳状构件101的情况下也同样地,预先决定绳状构件100以及101各自的长度和分别被飞行器12以及13保持的部位的位置。
90.当如上所述,图8a的状态成立时,接着,飞行器12以及13开始移动而运输垃圾袋22。
91.图9b示出飞行器12以及13从上升开始位置107以及108分别移动而运输垃圾袋22时的动作次序。
92.在步骤s1121以及s1122中,飞行器12以及13分别从上升开始位置107以及108上升到上升结束位置。如图8b所示,飞行器12以及13以使推进力作用于绳状构件100以及101的延长线方向的方式产生升力以及推力,并上升。由此,飞行器12以及13使用推进力的合力将垃圾袋22向铅垂上方牵引并吊起。但是,当在该状态下飞行器12以及13持续上升时,有可能飞行器12与上层的阳台的底面125发生干扰、或者绳状构件101与上层的阳台的底面外缘部126发生干扰。为了避免上述可能性,执行步骤s1121以及s1122。
93.在步骤s1121以及s1122中,飞行器12以及13分别以使角度θ成为角度θ
′
的方式进行移动。如图8c所示,飞行器12以及13分别移动到如绳状构件100以及101在安装位置122处所成的角度成为比角度θ大的角度θ
′
那样的上升结束位置130以及131。上升结束位置130以及131满足如下各条件。即,服务器装置11的控制部41在生成向飞行器12以及13的飞行指示时,使用阳台20的尺寸以及形状、上层的阳台的底面的尺寸、形状以及位置、垃圾袋22的位置及设想的大小以及重量、飞行器12以及13的尺寸、形状、推进力等信息,通过任意的算法来求出满足各条件的上升结束位置130以及131的空间坐标。首先,飞行器12的上升结束位
置130是在比扶手104靠内侧120处飞行器12与建筑物的外壁124以及上层的阳台的底面125不发生干扰的位置。另外,上升结束位置131是如飞行器13保持的绳状构件101与上层的阳台的底面外缘部126不发生干扰那样的位置。在此,角度θ
′
被保持在如当飞行器12以及13在绳状构件100以及101各自的延长线上产生推进力时推进力的合力在铅垂方向朝上作用而能够悬挂并吊起垃圾袋22那样的角度的范围内。在飞行器12以及13的性能等同且产生的推进力同等的情况下,角度θ
′
以小于120度的方式被保持。
94.在步骤s1123以及s1124中,飞行器12以及13从上升结束位置130以及131开始向水平方向的移动,将垃圾袋22运输到比扶手靠外侧121。如图8d所示,飞行器12以及13以维持上升结束位置130以及131处的升力,并由用于在水平方向上移动向扶手104的外侧121的推进力进行作用的方式产生推力。通过这样做,从而飞行器12以及13以在保持角度θ
′
而悬挂垃圾袋22的状态越过扶手104地运输。然后,飞行器12以及13根据飞行指示继续飞行。
95.根据如上所述的实施例,即使在由于比阳台20的扶手104靠内侧120的空间的制约,而飞行器12以及13的一方位于比阳台20的扶手104靠内侧120处、另一方位于外侧121的状态下,也能够运输垃圾袋22。因而,能够提高由飞行器12以及13进行的飞行动作的效率。
96.在上述实施方式中,规定飞行器12以及13的动作的处理及控制程序既可以存储于服务器装置11,经由网络14下载到飞行器12以及13,保存于存储部42,也可以保存于记录及存储介质,由飞行器12以及13读取,从而保存于存储部42。
97.本公开并不限定于上述实施方式。例如,既可以将框图所记载的多个块进行合并、或者也可以将1个块进行分割。也可以不依照记述而以时间序列执行流程图所记载的多个步骤,而是根据执行各步骤的装置的处理能力、或者根据需要而并行地或者按照不同的顺序执行。除此之外,能够进行不脱离本公开的要旨的范围的变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1