用于在量子通信系统中校准不等臂干涉仪的方法和装置与流程
文档序号:30257494发布日期:2022-06-02 02:34阅读:184来源:国知局
导航: X技术> 最新专利>电子通信装置的制造及其应用技术
1.本发明涉及量子通信技术领域,尤其涉及用于在量子通信系统中校准不等臂干涉仪的方法和装置。
背景技术:
2.目前,在量子通信系统(诸如,量子密钥分发系统)中主要采用偏振编码、相位编码和时间相位编码三种编码方式,其中,相位编码和时间相位编码均需要使用不等臂干涉仪进行编码和解码。然而,不等臂干涉仪的干涉效果很容易受到周围环境的影响而变差,这会导致量子通信系统的错误率增加,进而使得量子通信系统的成码率显著降低。
3.因此,提升不等臂干涉仪对周围环境的适应性以确保不等臂干涉仪的干涉效果的稳定性成为亟待解决的问题。
技术实现要素:
4.本发明的目的在于提供用于在量子通信系统中校准不等臂干涉仪的方法和装置。
5.根据本发明的一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的方法,所述方法包括:经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第二不等臂干涉仪的长臂上的移相器向所述第二不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;在调节所述相位调制电压期间监测所述相位调制电压的变化;响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第二不等臂干涉仪的短臂上的制冷片向所述第二不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
6.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
7.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的方法,所述方法包括:经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第一不等臂干涉仪的长臂上的移相器向所述第一不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;在调节所述相位调制电压期间监测所述相位调制电压的变化;响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第一不等臂干涉仪的短臂上的制冷片向所述第一不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
8.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
9.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的方法,所述方法包括:经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第二不等臂干涉仪的长臂上的移相器向所述第二不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;在调节所述相位调制电压期间监测所述相位调制电压的变化;响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第一不等臂干涉仪的短臂上的制冷片向所述第一不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
10.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
11.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的方法,所述方法包括:经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第一不等臂干涉仪的长臂上的移相器向所述第一不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;在调节所述相位调制电压期间监测所述相位调制电压的变化;响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第二不等臂干涉仪的短臂上的制冷片向所述第二不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
12.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
13.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的装置,所述装置包括:光脉冲输出单元,被配置为经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;单光子计数监测单元,被配置为监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;相位调制电压调节单元,被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第二不等臂干涉仪的长臂上的移相器向所述第二不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;相位调制电压监测单元,被配置为在调节所述相位调制电压期间监测所述相位调制电压的变化;温度干扰限制单元,被配置为响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第二不等臂干涉仪的短臂上的制冷片向所述第二不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
14.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂
和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
15.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的装置,所述装置包括:光脉冲输出单元,被配置为经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;单光子计数监测单元,被配置为监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;相位调制电压调节单元,被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第一不等臂干涉仪的长臂上的移相器向所述第一不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;相位调制电压监测单元,被配置为在调节所述相位调制电压期间监测所述相位调制电压的变化;温度干扰限制单元,被配置为响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第一不等臂干涉仪的短臂上的制冷片向所述第一不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
16.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
17.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的装置,所述装置包括:光脉冲输出单元,被配置为经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;单光子计数监测单元,被配置为监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;相位调制电压调节单元,被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第二不等臂干涉仪的长臂上的移相器向所述第二不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;相位调制电压监测单元,被配置为在调节所述相位调制电压期间监测所述相位调制电压的变化;温度干扰限制单元,被配置为响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第一不等臂干涉仪的短臂上的制冷片向所述第一不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
18.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
19.根据本发明的另一方面,提供一种用于在量子通信系统中校准不等臂干涉仪的装置,所述装置包括:光脉冲输出单元,被配置为经由第一不等臂干涉仪向第二不等臂干涉仪输出光脉冲,其中,所述第一不等臂干涉仪包括在所述量子通信系统的发射端,所述第二不等臂干涉仪包括在所述量子通信系统的接收端;单光子计数监测单元,被配置为监测在所述第二不等臂干涉仪的输出端探测到的单光子计数的变化;相位调制电压调节单元,被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节所述第一不等臂干涉仪的长臂上的移相器向所述第一不等臂干涉仪的长臂施加的相位调制电压,使探测到的单光子计数保持在所述干涉阈值;相位调制电压监测单元,被配置为在调节所述相位调制电压期间监测所述相位调制电压的变化;温度干扰限制单元,被配置为响应于所述相位调制电压达到所述移相器的电压调制范围的极限值,通过所述第二不等臂干
涉仪的短臂上的制冷片向所述第二不等臂干涉仪的短臂施加温度干扰,使所述移相器朝着与所述极限值相反的方向调节所述相位调制电压。
20.根据本发明的一个实施例,所述最佳干涉状况包括所述第一不等臂干涉仪的长臂和短臂之间的光程差与所述第二不等臂干涉仪的长臂和短臂之间的光程差相同。
21.根据本发明的另一方面,提供一种存储有计算机程序的计算机可读存储介质,当所述计算机程序在被处理器执行时,实现如前面所述的用于在量子通信系统中校准不等臂干涉仪的方法。
22.根据本发明的另一方面,提供一种计算机设备,所述计算机设备包括:处理器;存储器,存储有计算机程序,当所述计算机程序被处理器执行时,实现如前面所述的用于在量子通信系统中校准不等臂干涉仪的方法。
23.本发明所提供的用于在量子通信系统中校准不等臂干涉仪的方法和装置能够在很大程度上提升量子通信系统中的不等臂干涉仪对周围环境的适应性以确保量子通信系统中的不等臂干涉仪的干涉效果的稳定性,这使得量子通信系统的成码率更加高效、稳定和可靠。
附图说明
24.通过下面结合附图进行的描述,本发明的上述目的和特点将会变得更加清楚。
25.图1a示出了相关技术中的量子通信系统的示意图。
26.图1b示出了通过调节移相器向不等臂干涉仪的长臂施加的相位调制电压改变不等臂干涉仪的长臂和短臂之间的光程差的示意性曲线图。
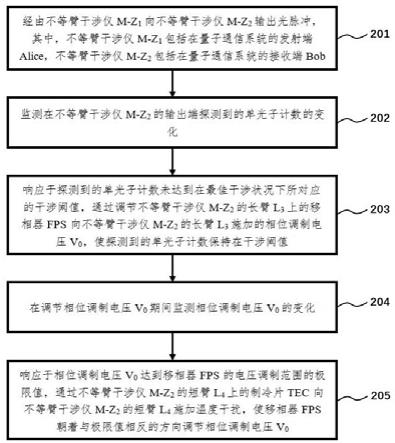
27.图2a示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的示意性流程图。
28.图2b示出了应用图2a所示的方法的量子通信系统的示意图。
29.图3a示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的另一示意性流程图。
30.图3b示出了应用图3a所示的方法的量子通信系统的另一示意图。
31.图4a示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的另一示意性流程图。
32.图4b示出了应用图4a所示的方法的量子通信系统的另一示意图。
33.图5a示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的另一示意性流程图。
34.图5b示出了应用图5a所示的方法的量子通信系统的另一示意图。
35.图6示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的装置的示意性结构框图。
具体实施方式
36.下面,将参照附图来详细说明本发明的实施例。
37.图1a示出了相关技术中的量子通信系统的示意图。
38.参照图1a,在图1a所示的量子通信系统中,可包括不等臂干涉仪m-z1和不等臂干
的长臂l3施加的相位调制电压v0,使探测到的单光子计数保持在干涉阈值。
49.在步骤204,可在调节相位调制电压v0期间监测相位调制电压v0的变化。
50.在步骤205,可响应于相位调制电压v0达到移相器fps的电压调制范围的极限值(如图1b中所示的v
max
或v
min
),通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加温度干扰,使移相器fps朝着与极限值相反的方向调节相位调制电压v0。
51.在一个示例中,当不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1增大时,可通过增大不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0来使不等臂干涉仪m-z2的长臂l3上的光程变长,以增大不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z2的短臂l4上的光程变短,以继续增大不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。当光程差
△
s2的增大使得光程差
△
s2大于光程差
△
s1时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
52.在另一示例中,当不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1减小时,可通过增大不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0来使不等臂干涉仪m-z2的长臂l3上的光程变短,以减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z2的短臂l4上的光程变长,以继续减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。当光程差
△
s2的减小使得光程差
△
s2小于光程差
△
s1时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
53.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2增大时,可通过增大不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0来使不等臂干涉仪m-z2的长臂l3上的光程变短,以减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z2的短臂l4上的光程变长,以继续减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。当光程差
△
s2的减小使得光程差
△
s2小于光程差
△
s1时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
的短臂l2施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z1的短臂l2上的光程变长,以继续减小不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的减小使得光程差
△
s1小于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
65.在另一示例中,当不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1减小时,可通过增大不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0来使不等臂干涉仪m-z1的长臂l1上的光程变长,以增大不等臂干涉仪m-z1的长臂l1和短臂l1之间的光程差
△
s1。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z1的短臂l2上的光程变短,以继续增大不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的增大使得
△
s1大于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
66.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2增大时,可通过增大不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0来使不等臂干涉仪m-z1的长臂l1上的光程变长,以增大不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z1的短臂l2上的光程变短,以继续增大不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的增大使得
△
s1大于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
67.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2减小时,可通过增大不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0来使不等臂干涉仪m-z1的长臂l1上的光程变短,以减小不等臂干涉仪m-z1的长臂l1和短臂l1之间的光程差
△
s1。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z1的短臂l2上的光程变长,以继续减小不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的减小使得
△
s1小于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
的短臂l2施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z1的短臂l2上的光程变短,以增大不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的增大使得光程差
△
s1大于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
79.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2增大时,可通过增大不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0来使不等臂干涉仪m-z2的长臂l3上的光程变短,以减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z1的短臂l2上的光程变短,以增大不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的增大使得光程差
△
s1大于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
80.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2减小时,可通过增大不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0来使不等臂干涉仪m-z2的长臂l3上的光程变长,以增大不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z1的短臂l2上的光程变长,以减小不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。当光程差
△
s1的减小使得光程差
△
s1小于光程差
△
s2时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
81.类似地,还可使移相器fps可朝着与极限值v
min
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且同样能够避免由于相位调制电压v0超过电压调制范围的极限值v
min
而导致量子通信系统运行的中断。
82.因此,使用图4a所示的方法,同样可在很大程度上提升量子通信系统中的不等臂干涉仪对周围环境的适应性以确保量子通信系统中的不等臂干涉仪的干涉效果的稳定性,这使得量子通信系统的成码率更加高效、稳定和可靠。
83.图5a示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的另一示意性流程图。图5b示出了应用图5a所示的方法的量子通信系统的另一示意图。
84.参照图5a,图5a所示的方法可包括如下步骤。
的短臂l4施加一个极小的制热温度(例如,使温度从25℃上升到25.1℃)来使不等臂干涉仪m-z2的短臂l4上的光程变长,以减小不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。当光程差
△
s2的减小使得光程差
△
s2小于光程差
△
s1时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
93.在另一示例中,当不等臂干涉仪m-z2的长臂l3和短臂l3之间的光程差
△
s2减小时,可通过增大不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0来使不等臂干涉仪m-z1的长臂l1上的光程变短,以减小不等臂干涉仪m-z1的长臂l1和短臂l2之间的光程差
△
s1。然而,当相位调制电压v0达到移相器的电压调制范围的极限值v
max
时,可通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加一个极小的制冷温度(例如,使温度从25℃下降到24.9℃)来使不等臂干涉仪m-z2的短臂l4上的光程变短,以增大不等臂干涉仪m-z2的长臂l3和短臂l4之间的光程差
△
s2。当光程差
△
s2的增大使得光程差
△
s2大于光程差
△
s1时,移相器fps可朝着与极限值v
max
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且能够避免由于相位调制电压v0超过电压调制范围的极限值v
max
而导致量子通信系统运行的中断。
94.类似地,还可使移相器fps可朝着与极限值v
min
相反的方向调节相位调制电压v0,这不仅能够将移动器fps对相位调制电压v0的调节限制在电压调制范围内寻找最佳干涉位置,而且同样能够避免由于相位调制电压v0超过电压调制范围的极限值v
min
而导致量子通信系统运行的中断。
95.因此,使用图5a所示的方法,同样可在很大程度上提升量子通信系统中的不等臂干涉仪对周围环境的适应性以确保量子通信系统中的不等臂干涉仪的干涉效果的稳定性,这使得量子通信系统的成码率更加高效、稳定和可靠。
96.图6示出了根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的装置的示意性结构框图。
97.参照图6,根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的装置可包括光脉冲输出单元601、单光子计数监测单元602、相位调制电压调节单元603、相位调制电压监测单元604和温度干扰限制单元605。
98.在一个示例中,光脉冲输出单元601可被配置为经由不等臂干涉仪m-z1向不等臂干涉仪m-z2输出光脉冲,其中,不等臂干涉仪m-z1可包括在图2b所示的量子通信系统的发射端alice,不等臂干涉仪m-z2可包括在图2b所示的量子通信系统的接收端bob;单光子计数监测单元602可被配置为监测在不等臂干涉仪m-z2的输出端探测到的单光子计数的变化;相位调制电压调节单元603可被配置为响应于在步骤202探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0,使探测到的单光子计数保持在干涉阈值;相位调制电压监测单元604可被配置为在调节相位调制电压v0期间监测相位调制电压v0的变化;温度干扰限制单元605可被配置为响应于相位调制电压v0达到移相器fps的电压调制范围的极限值(如图1b中所示的v
max
或v
min
),通过不等臂干涉仪m-z2的短臂l4上的制冷片tec
向不等臂干涉仪m-z2的短臂l4施加温度干扰,使移相器fps朝着与极限值相反的方向调节相位调制电压v0。
99.在另一示例中,光脉冲输出单元601可被配置为经由不等臂干涉仪m-z1向不等臂干涉仪仪m-z2输出光脉冲,其中,不等臂干涉仪m-z1可包括在图3a所示的量子通信系统的发射端alice,不等臂干涉仪仪m-z2可包括在图3a所示的量子通信系统的接收端bob;单光子计数监测单元602可被配置为监测在不等臂干涉仪m-z2的输出端探测到的单光子计数的变化;相位调制电压调节单元603可被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0,使探测到的单光子计数保持在干涉阈值;相位调制电压监测单元604可被配置为在调节相位调制电压v0期间监测相位调制电压v0的变化;温度干扰限制单元605可被配置为响应于相位调制电压v0达到移相器fps的电压调制范围的极限值(如图1b中所示的v
max
或v
min
),通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加温度干扰,使移相器fps朝着与极限值相反的方向调节相位调制电压v0。
100.在另一示例中,光脉冲输出单元601可被配置为经由不等臂干涉仪m-z1向不等臂干涉仪仪m-z2输出光脉冲,其中,不等臂干涉仪m-z1可包括在图3a所示的量子通信系统的发射端alice,不等臂干涉仪仪m-z2可包括在图3a所示的量子通信系统的接收端bob;单光子计数监测单元602可被配置为监测在不等臂干涉仪m-z2的输出端探测到的单光子计数的变化;相位调制电压调节单元603可被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,通过调节不等臂干涉仪m-z2的长臂l3上的移相器fps向不等臂干涉仪m-z2的长臂l3施加的相位调制电压v0使探测到的单光子计数保持在干涉阈值;相位调制电压监测单元604可被配置为在调节相位调制电压v0期间监测相位调制电压v0的变化;温度干扰限制单元605可被配置为响应于相位调制电压v0达到移相器fps的电压调制范围的极限值(如图1b中所示的v
max
或v
min
),通过不等臂干涉仪m-z1的短臂l2上的制冷片tec向不等臂干涉仪m-z1的短臂l2施加温度干扰,使移相器fps朝着与极限值相反的方向调节相位调制电压v0。
101.在另一示例中,光脉冲输出单元601可被配置为经由不等臂干涉仪m-z1向不等臂干涉仪仪m-z2输出光脉冲,其中,不等臂干涉仪m-z1可包括在图3a所示的量子通信系统的发射端alice,不等臂干涉仪仪m-z2可包括在图3a所示的量子通信系统的接收端bob;单光子计数监测单元602可被配置为监测在不等臂干涉仪m-z2的输出端探测到的单光子计数的变化;相位调制电压调节单元603可被配置为响应于探测到的单光子计数未达到在最佳干涉状况下所对应的干涉阈值,可通过调节不等臂干涉仪m-z1的长臂l1上的移相器fps向不等臂干涉仪m-z1的长臂l1施加的相位调制电压v0,使探测到的单光子计数保持在干涉阈值;相位调制电压监测单元604可被配置为在调节相位调制电压v0期间监测相位调制电压v0的变化;温度干扰限制单元605可被配置为响应于相位调制电压v0达到移相器fps的电压调制范围的极限值(如图1b中所示的v
max
或v
min
),可通过不等臂干涉仪m-z2的短臂l4上的制冷片tec向不等臂干涉仪m-z2的短臂l4施加温度干扰,使移相器fps朝着与极限值相反的方向调节相位调制电压v0。
102.因此,使用图6所示的装置,同样可在很大程度上提升量子通信系统中的不等臂干
涉仪对周围环境的适应性以确保量子通信系统中的不等臂干涉仪的干涉效果的稳定性,这使得量子通信系统的成码率更加高效、稳定和可靠。
103.此外,根据本发明的示例性实施例还可提供一种存储有计算机程序的计算机可读存储介质。该计算机可读存储介质存储有当被处理器执行时使得处理器执行根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的计算机程序。该计算机可读记录介质是可存储由计算机系统读出的数据的任意数据存储装置。计算机可读记录介质的示例包括:只读存储器、随机存取存储器、只读光盘、磁带、软盘、光数据存储装置和载波(诸如经有线或无线传输路径通过互联网的数据传输)。
104.此外,根据本发明的示例性实施例还可提供一种计算设备。该计算设备包括处理器和存储器。存储器用于存储计算机程序。所述计算机程序被处理器执行使得处理器执行根据本发明的示例性实施例的用于在量子通信系统中校准不等臂干涉仪的方法的计算机程序。
105.尽管已参照优选实施例表示和描述了本技术,但本领域技术人员应该理解,在不脱离由权利要求限定的本技术的精神和范围的情况下,可以对这些实施例进行各种修改和变换。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:张建 陈柳平 付仁清 刘亚龙
- 技术所有人:国开启科量子技术(北京)有限公司
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、王老师:1.数字信号处理 2.传感器技术及应用 3.机电一体化产品开发 4.机械工程测试技术 5.逆向工程技术研究
- 2、王老师:1.机器人 2.嵌入式控制系统开发
- 3、孙老师:1.振动信号时频分析理论与测试系统设计 2.汽车检测系统设计 3.汽车电子控制系统设计
- 4、毕老师:机构动力学与控制
- 5、袁老师:1.计算机视觉 2.无线网络及物联网
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....