一种基于深度算法图像去反光的图像采集3D成像装置
一种基于深度算法图像去反光的图像采集3d成像装置
技术领域
1.本发明涉及深度算法图像去反光辅助装置,特别涉及一种基于深度算法图像去反光的图像采集3d成像装置。
背景技术:
2.精确图像一直是人类获取信息的主要手段,随着人类社会活动的迅速扩张和科,技水平的不断进步,图像信息的获取和处理正发挥着越来越重要的作用。但是,在图像采集过程中,光线发挥重要作用,但光线处理不当会导致采集图像的颜色、纹理等特征不同程度产生衰弱,故此类图像清晰度往往较低,色调趋于灰白,严重影响了机器视觉系统的正常工作。反光是美学摄影中的重要因素,也是虚拟现实中的重要场景,从反光的缺点来讲,反光让图片变得不清晰,无论是遥感成像、安防监控,还是智能交通方面都有影响,在通过去图片反光技术之前需要进行被采集物的图像捕捉,然后通过系统自动生成3d图像,由于传统的3d成像图片采集过程中补光效果不佳,补光装置不能根据成像设备围绕物品中心点旋转,导致物品成像后容易出现部分偏光、部分角度光线过强导致反光等情况,不利于后期的深度算法图像去反光技术的进行,同时还需要提供一种能围绕物品多角度图像采集的结构。
3.故此,现有的深度算法图像去反光辅助装置需要进一步改善。
技术实现要素:
4.本发明的目的是为了提供一种基于深度算法图像去反光的图像采集3d成像装置,能在进行深度算法图像去反光技术前,实现图像3d采集的多角度采集,合成效果更加,同时在多角度采集的过程中保证前序步骤图像反光效果有效的降低,便于后续的深度算法图像去反光技术更好的进行。
5.为了达到上述目的,本发明采用以下方案:
6.一种基于深度算法图像去反光的图像采集3d成像装置,包括被采集物放置台,所述被采集物放置台围绕所述被采集物放置台中心圆周外侧设置有成像装置旋转支架,所述成像装置旋转支架上设置有能围绕所述被采集物放置台的中心点上下摆动旋转的弧形摆动活动件,所述弧形摆动活动件上设置有保持朝向所述被采集物放置台中心点的图像采集设备和防反光补光装置,所述弧形摆动活动件和所述被采集物放置台之间设置有在所述成像装置旋转支架旋转过程中能进行上下往复移动的全景图像捕捉联动机构,在所述成像装置旋转支架上设置有和所述图像采集设备的捕捉方向相对立的防反光背景挡板。
7.进一步地,所述被采集物放置台包括柱形底座,所述柱形底座上设置有透明放置座。
8.进一步地,所述透明放置座包括顶板,所述顶板下表面和所述柱形底座上端面之间设置有连接柱,所述顶板和所述连接柱采用透明材料支撑。
9.进一步地,所述成像装置旋转支架包括设置于所述柱形底座上端面的第一环形轨
道,所述第一环形轨道包裹于所述柱形底座圆周外侧,所述第一环形轨道上活动设置有成像装置支架,所述柱形底座上端面设置有主动齿轮,所述第一环形轨道内侧旋转活动设置有和所述成像装置支架固定连接的内环体,所述内环体内壁设置有内齿轮,所述内齿轮和所述主动齿轮啮合传动。
10.进一步地,所述弧形摆动活动件包括设置于所述成像装置支架上的弧形轨道,所述弧形轨道的弧线圆心和所述被采集物放置台中心点重合设置,所述弧形轨道内活动设置有弧线路径移动底座。
11.进一步地,所述防反光补光装置包括设置于所述弧线路径移动底座上的弧形补光灯支杆,所述弧形补光灯支杆内端面布置有多个防反光补光灯,多个所述防反光补光灯朝向所述被采集物放置台的中心点设置。
12.进一步地,所述全景图像捕捉联动机构包括设置于所述弧线路径移动底座外端的摆动杆,所述摆动杆上设置有驱动直槽口,所述柱形底座圆周外边缘设置有第二环形轨道,所述第二环形轨道上设置有全景移动底座,所述全景移动底座上设置有竖向导向杆,所述竖向导向杆上套设有活动套件,所述活动套件上设置有竖向驱动杆,所述竖向驱动杆上端设置有横向驱动轴,所述横向驱动轴穿插于所述驱动直槽口内活动,围绕所述柱形底座圆周外壁设置有波浪形闭环驱动槽,所述活动套件上设置有全景驱动轴,所述全景驱动轴穿插于所述波浪形闭环驱动槽内活动。
13.进一步地,所述防反光背景挡板为球状面设置,并且和所述被采集物放置台的中心点同心设置。
14.进一步地,所述防反光背景挡板采用黑色材料制成。
15.综上所述,本发明相对于现有技术其有益效果是:
16.本发明解决了现有深度算法图像去反光辅助装置存在的不足,通过本发明的结构设置,具备以下的优点,在实现图像的深度算法图像去反光技术前,对物品的多角度图像进行捕捉,使图像合成更加的准确,同时,为了保证多角度图像捕捉过程中避免反光图像的出现,设置有跟随成像设备进行移动的补光结构,有效的降低了图像的反光效果,便于后续3d成像后表面反光效果的处理,且结构简单,使用方便。
附图说明
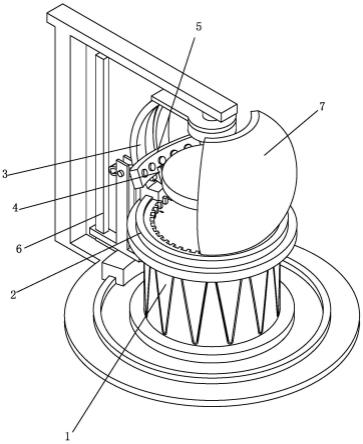
17.图1为本发明的立体图;
18.图2为本发明的主视图;
19.图3为图2沿a-a线的剖视图;
20.图4为图3沿b-b线的剖视图;
21.图5为图2沿c-c线的剖视图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.请参阅图1-5,本发明提供
24.一种基于深度算法图像去反光的图像采集3d成像装置,包括被采集物放置台1,所述被采集物放置台1围绕所述被采集物放置台1中心圆周外侧设置有成像装置旋转支架2,所述成像装置旋转支架2上设置有能围绕所述被采集物放置台1的中心点上下摆动旋转的弧形摆动活动件3,所述弧形摆动活动件3上设置有保持朝向所述被采集物放置台1中心点的图像采集设备4和防反光补光装置5,所述弧形摆动活动件3和所述被采集物放置台1之间设置有在所述成像装置旋转支架2旋转过程中能进行上下往复移动的全景图像捕捉联动机构6,在所述成像装置旋转支架2上设置有和所述图像采集设备4的捕捉方向相对立的防反光背景挡板7;
25.将被采集物品放置于所述被采集物放置台1上进行待采集;
26.所述被采集物放置台1采用透明材料制成,使所述图像采集设备4有效的捕捉到物品底部的图像,便于后续的图片处理;
27.启动所述图像采集设备4和防反光补光装置5;
28.图像采集设备4用于实施捕捉物品每个角度的图像,可以根据需求调节捕捉频率;
29.防反光补光装置5能跟随所述图像采集设备4移动,提供物品的补光效果,防止在所述图像采集设备4移动后出现图像反光的情况,保证光线一致,便于后续图像反光处理的更好进行;
30.所述防反光补光装置5和所述图像采集设备4能始终围绕所述被采集物放置台1的中心旋转,保证成像角度和光线角度一致,降低物品的阴暗面出现;
31.所述弧形摆动活动件3用于控制所述防反光补光装置5和所述图像采集设备4围绕所述被采集物放置台1中心点上下摆动旋转;
32.所述成像装置旋转支架2用于控制所述防反光补光装置5和所述图像采集设备4围绕所述被采集物放置台1进行圆周旋转;
33.防反光背景挡板7减少背景杂物,便于后续图像的抠图处理,同时设置为黑色材料,具备较强的吸光效果,降低反光效果;
34.所述全景图像捕捉联动机构6用于在所述成像装置旋转支架2带动所述防反光补光装置5和所述图像采集设备4进行圆周旋转时,同时联动所述弧形摆动活动件3控制所述防反光补光装置5和所述图像采集设备4进行上下摆动,对物品多角度成像,使后期图像3d成像处理更清晰;
35.本发明在图像采集完毕后,应用以下技术进行去反光处理;
36.现阶段,基于图像的去反光研究可分为基于图像增强的方法、基于图像复原的方法和基于学习的方法。
37.基于图像增强的方法是对退化的图像进行增强,能够有选择性的突出图像中景物的特征和有价值的信息,有效地增强图像对比度,改善图像的质量。但由于未曾考虑有反光散射图像的降质退化机理,会丢失一定的信息特征。比较典型的有直方图均衡,基于retinex理论的增强算法等,将透射图的估计转化为二次规划问题,并在hsi空间进行自适应矫正饱和度分量,来恢复与增强图像。郭等将夜晚图像分解为散射图像层和发光图像层,对散射图像层进行色偏纠正和引导滤波,改善了恢复图像的能见度和清晰度。
38.基于图像复原的方法通过研究大气悬浮颗粒对光的散射作用,建立大气散射模
型,分析图像退化的物理机理,反演复原出的图像效果真实。假设透射率与表面阴影局部不相关,估计场景反射率和介质透射率来恢复图像,但这种假设在强反射条件下的去散射效果不是很好。提出了深度估计、颜色分析和可见性恢复,解决了光晕效应和色彩失真,该算法对沙尘暴等恶劣天气也有很好的效果。提出了一种暗原色先验的假设,利用引导滤波细化透射率,最终恢复出无散射图像,该理论引起广泛关注。等利用中值滤波器和截断奇异值分解法组成的图像滤波方法来估计暗原色先验的散射层,恢复出了对比度高的无反光图像,但景物边缘会有光晕;史等依据地物波谱特性以及人眼视锥细胞特性将rgb三通道转换为透射率三通道,结合暗原色先验减少了部分场景中去反光图像色彩失真;算法不适用于天空区域,根据天空区域占比估计不同的大气光照强度,利用中值滤波和最小值滤波解决了景物边缘光晕问题。提出基于暗通道能量最小估计透射图,鞠等人根据有反光散射图像的亮度和纹理特征分布,结合大气散射模型及小波域的多尺度锐化进行图像去反光与增强,取得不错的视觉效果;根据图像中像素点在rgb空间上的聚类特性,构造了一种局部的图像去散射反光算法。基于复原的方法需建立先验模型,因此模型参数的准确估计使得算法的使用有诸多限制。
39.近年来,在物理模型的基础上基于深度学习的方法也不断涌现。深度学习的方法可以理解为运用了非常强大的非线性模型,利用大量的有/无反光图像的数据对,对景深或透射图进行估计。采用大量合成数据对通过卷积神经网络
40.(convolutional neural network,cnn)网络训练有反光图像特征,构建随机森林回归器进行分类后获得透射图。
41.固定白色大气光和随机设置透射值,合成有散射图像,使用随机森林回归来学习透射率,但该算法对强反光图片去反射后会增加噪声;构造两层高斯处理回归模型,通过样本选择实现对透射图的估计;
42.基于卷积神经网络,设计了由四个连续操作形成的dehazenet网络,通过学习来估计透射率,进行图像去反光,但需采用引导滤波细化透射率,才能处理块伪影现象。利用多尺度深层神经网络,通过学习有反光图像和相应的透射率之间的映射,并基于不同图像尺度来估计透射率;李等人设计一种生成对抗映射网络的多层感知去散射算法,利用生成网络对提取特征进行多层感知映射,得到图像透视率相关的抽象特征;设计一个端到端网络实现对透射图与光照统一变量参数的估计。这几种基于学习的方法在很大程度上依赖于大气光照强度以及透射图正确估计。在训练过程中,学习的模型实际上被满足白平衡的有漫反射图像过度填充。一旦大气光颜色估计出现小的误差,它们的性能将迅速下降。
43.本发明所述被采集物放置台1包括柱形底座101,所述柱形底座101上设置有透明放置座102。
44.本发明所述透明放置座102包括顶板1021,所述顶板1021下表面和所述柱形底座101上端面之间设置有连接柱1022,所述顶板1021和所述连接柱1022采用透明材料支撑。
45.本发明所述成像装置旋转支架2包括设置于所述柱形底座101上端面的第一环形轨道201,所述第一环形轨道201包裹于所述柱形底座101圆周外侧,所述第一环形轨道201上活动设置有成像装置支架202,所述柱形底座101上端面设置有主动齿轮205,所述第一环形轨道201内侧旋转活动设置有和所述成像装置支架202固定连接的内环体203,所述内环体203内壁设置有内齿轮204,所述内齿轮204和所述主动齿轮205啮合传动。
46.本发明所述弧形摆动活动件3包括设置于所述成像装置支架202上的弧形轨道301,所述弧形轨道301的弧线圆心和所述被采集物放置台1中心点重合设置,所述弧形轨道301内活动设置有弧线路径移动底座302。
47.本发明所述防反光补光装置5包括设置于所述弧线路径移动底座302上的弧形补光灯支杆501,所述弧形补光灯支杆501内端面布置有多个防反光补光灯502,多个所述防反光补光灯502朝向所述被采集物放置台1的中心点设置。
48.本发明所述全景图像捕捉联动机构6包括设置于所述弧线路径移动底座302外端的摆动杆601,所述摆动杆601上设置有驱动直槽口602,所述柱形底座101圆周外边缘设置有第二环形轨道603,所述第二环形轨道603上设置有全景移动底座604,所述全景移动底座604上设置有竖向导向杆605,所述竖向导向杆605上套设有活动套件606,所述活动套件606上设置有竖向驱动杆607,所述竖向驱动杆607上端设置有横向驱动轴608,所述横向驱动轴608穿插于所述驱动直槽口602内活动,围绕所述柱形底座101圆周外壁设置有波浪形闭环驱动槽609,所述活动套件606上设置有全景驱动轴610,所述全景驱动轴610穿插于所述波浪形闭环驱动槽609内活动。
49.本发明所述防反光背景挡板7为球状面设置,并且和所述被采集物放置台1的中心点同心设置。
50.本发明所述防反光背景挡板7采用黑色材料制成。
51.以上显示和描述了本发明的基本原理和主要特征以及本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1