防抖组件、摄像头模组及电子设备的制作方法
1.本技术属于智能设备技术领域,特别是涉及一种防抖组件及摄像头模组。
背景技术:
2.目前,摄像头模组防抖设置多为电磁式设计,主要是通过洛伦兹力驱动,并采用弹簧走线和回弹,存在驱动力低、体积大的问题。
技术实现要素:
3.本技术一方面提供了一种防抖组件,包括:
4.第一承载件;
5.第二承载件,与所述第一承载件相对设置,朝向所述第一承载件的一侧设置有压电马达模组;
6.移动件,位于所述第一承载件与所述第二承载件之间,与所述第一承载件滑动连接,所述移动件朝向所述第二承载件的一侧与所述压电马达模组抵接,所述压电马达模组被配置为在通电后产生振动,以推动所述移动件相对于所述第一承载件移动和/或转动,所述移动件用于安装感光件或透镜模组,以使所述感光件或透镜模组对透过所述第一承载件或所述第二承载件的光线进行接收。
7.本技术一方面提供了一种摄像头模组,包括上述所述的防抖组件;
8.所述摄像头模组还包括:
9.摄像头壳体,所述防抖组件安装在所述摄像头壳体内;
10.透镜模组,安装在所述摄像头壳体内,以将射入所述摄像头壳体的光线传递至防抖组件;以及
11.感光件,安装在所述移动件上,用于接收所述透镜模组传递来的光线。
12.本技术一方面提供了一种电子设备,包括:
13.机壳,设置有容置空间;
14.显示屏组件,设置在所述机壳上;以及
15.如上述所述的摄像头模组,所述摄像头模组安装在所述容置空间内。
16.采用本技术所述技术方案,具有的有益效果为:本技术通过第一承载件及第二承载件对移动件的安装,使得移动件在压电马达模组的作用下实现移动和/活转动,进而实现了光学防抖。本技术中压电马达模组可减少防抖组件的体积,可改变防抖组件的结构,并在通电后产生振动,提供足够的驱动力。
附图说明
17.图1为本技术一实施例中摄像头模组的结构示意图;
18.图2为图1所示实施例中摄像头模组在线
ⅱ‑ⅱ
的剖视图;
19.图3为图2所示实施例中防抖组件的俯视图;
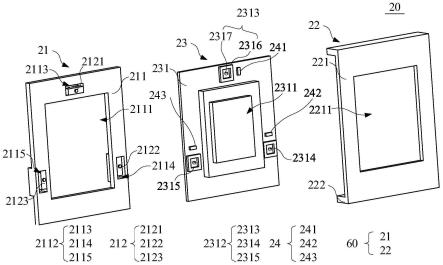
20.图4为图2所示实施例中防抖组件在一视角的爆炸示意图;
21.图5为图2所示实施例中防抖组件在另一视角的爆炸示意图;
22.图6为图5所示实施例中第一承载件的俯视图;
23.图7为图6所示实施例中第一承载件在线
ⅶ‑ⅶ
的剖视图;
24.图8为图6所示实施例中第一承载件在线
ⅷ‑ⅷ
的剖视图;
25.图9为图6所示实施例中第一承载件在线
ⅸ‑ⅸ
的剖视图;
26.图10为图3所示实施例中防抖组件在线
ⅹ‑ⅹ
的剖视图;
27.图11为图3所示实施例中防抖组件在线
ⅺ‑ⅺ
的剖视图;
28.图12为图6所示实施例中防抖组件在线
ⅻ‑ⅻ
的剖视图;
29.图13为图1所示实施例中防抖组件的俯视图;
30.图14为本技术一实施例电子设备的结构示意图;
31.图15为本技术一实施例中电子设备的结构组成示意图。
具体实施方式
32.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其他实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其他实施例相结合。
34.本技术阐述了一种摄像头模组。该摄像头模组可以接收外界光线,以完成拍照、摄像。在一些实施例中,在拍照、摄像过程中,该摄像头模组受环境因素影响产生一定程度地抖动,进而外界光线的入射位置等产生一定的偏差,进而为摄像头模组对光线的捕捉、成像等带来不利影响。而该摄像头模组可以内部进行调整以实现光学防抖功能。在一些实施例中,在拍照、摄像过程中,该摄像头模组可以内部进行调整以实现变焦功能。
35.请参阅图1和图2,图1为本技术一实施例中摄像头模组的结构示意图,图2为图1所示实施例中摄像头模组在线
ⅱ‑ⅱ
的剖视图。摄像头模组100可包括用于接收光线以完成拍照、摄像的感光组件200以及用于接收并透过光线的透镜组件300。其中,透镜组件300的光轴为z(光轴z也可被称为“第一方向”)。透镜组件300用于透过光线,以使光线沿光轴z传输,进而将光线传输至感光组件200。感光组件200对光线进行感测形成电信号,以完成拍照、摄像。
36.请参阅图2,感光组件200可包括具有第一容纳空间101的第一壳体10、安装在第一容纳空间101内的防抖组件20以及安装在防抖组件20上的感光件30。第一壳体10可与透镜组件300连接在一起。第一壳体10可用于承载防抖组件20及感光件30。透镜组件300用于透过光线,以使光线沿光轴z传输,进而入射至第一壳体10的第一容纳空间101内。感光件30可至少部分位于第一容纳空间101内,以接收进入第一容纳空间101内的光线,并对光线进行感测,形成电信号,以完成拍照、摄像。感光件30可设置在防抖组件20上。防抖组件20用于带
动感光件30进行移动和/或转动,克服摄像头模组100受环境因素影响产生的抖动,以进行光学防抖。在某些场景中,防抖组件20也可用于变焦。
37.在一些实施例中,在拍照、摄像过程中,摄像头模组100受环境因素影响产生一定程度地抖动,进而带动感光件30抖动,外界光线的入射位置等进而产生一定的偏差,进而为感光件30对光线的捕捉、成像等带来不利影响。而防抖组件20带动感光件30进行移动和/或转动,以克服感光件30地抖动,进而实现光学防抖功能。
38.在一些实施例中,在拍照、摄像过程中,防抖组件20带动感光件30进行移动,例如在光轴z上相对于第一壳体10滑动,以实现摄像头模组100的变焦功能。
39.需要指出的是,此处以及上、下文中的术语“第一”、“第二
”……
等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二
”……
等的特征可以明示或者隐含地包括一个或者更多个所述特征。
40.请参阅图2、图3、图4和图5,图3为图2所示实施例中防抖组件20的俯视图,图4为图2所示实施例中防抖组件20在一视角的爆炸示意图,图5为图2所示实施例中防抖组件20在另一视角的爆炸示意图。防抖组件20可包括安装在第一壳体10例如第一容纳空间101内的第一承载件21、安装在第一壳体10例如第一容纳空间101内且位于第一承载件21远离透镜组件300一侧的第二承载件22、安装在第一承载件21与第二承载件22之间且用于安装感光件30的移动件23以及用于检测移动件23相对于第一壳体10位置的位置检测组件24。
41.可以理解地,在其他实施例中,上述实施例中的名称“第一承载件”、“第二承载件”、“第三承载件”以及“承载件”可以相互转换。例如,“第一承载件”可以转换为“第二承载件”,而相应地,“第二承载件”可以转换为“第一承载件”。
42.第一承载件21与第二承载件22配合安装移动件23,以实现移动件23在第一壳体10内的安装。移动件23可相对于第一承载件21、第二承载件22移动和/或转动,以实现感光件30在x轴(x轴也可被称为“第二方向”)与y轴(y轴也可被称为“第三方向”)所形成的移动平面上的移动和/或转动,进而实现光学防抖功能。位置检测组件24用于检测移动件23的位置姿态信息,以便更好的控制移动件23移动和/或转动,及使移动件23在恰当的位置以正确的姿态进行光学防抖。在某些场景中,防抖组件20具有变焦功能时,位置检测组件24也可通过检测移动件23的位置姿态信息,实现防抖组件20的精准变焦。
43.可以理解地,在其他实施例中,上述实施例中的名称“第一方向”、“第二方向”、“第三方向”以及“方向”可以相互转换。例如,“第一方向”可以转换为“第二方向”,而相应地,“第二方向”可以转换为“第一方向”。
44.在一实施例中,第一承载件21与第二承载件22、移动件23可一同相对于第一壳体10在光轴z上移动,实现变焦功能。在一些实施例中,光轴z与移动平面垂直设置。当然,在某些实施例中,光轴z可与移动平面呈夹角设置,且夹角度数为大于0,小于等于90
°
。
45.第一承载件21可包括与第二承载件22配合安装移动件23的承载主体211以及安装在承载主体211上且用于驱动移动件23在移动平面上移动和/或转动的压电马达模组212。
46.承载主体211可采用硬性材料制成,整体可呈框架结构,当然也可以为壳体状结构。承载主体211整体结构可通过板材冲压形成,也可以通过浇铸形成、热塑成型,当然也可以通过其他方式形成,不做赘述。
47.承载主体211可安装在第一壳体10上。在一些实施例中,承载主体211可与第一壳
体10为一体结构。在一些实施例中,承载主体211可安装在第二承载件22上。即,在某些场景中,承载主体211可通过第二承载件22间接安装在第一壳体10上。
48.承载主体211中部设置第一透光孔2111,以使进入第一壳体10内的光线透过进而传输至感光件30。
49.承载主体211朝向第二承载件22的一侧设置安装部2112,以用于安装压电马达模组212。
50.请参阅图5、图6、图7、图8和图9,图6为图5所示实施例中第一承载件21的俯视图,图7为图6所示实施例中第一承载件21在线
ⅶ‑ⅶ
的剖视图,图8为图6所示实施例中第一承载件21在线
ⅷ‑ⅷ
的剖视图,图9为图6所示实施例中第一承载件21在线
ⅸ‑ⅸ
的剖视图。安装部2112可包括多个子安装部,例如第一子安装部2113、第二子安装部2114和第三子安装部2115等。子安装部的数量可依据压电马达模组212的需求确定。子安装部例如第一子安装部2113、第二子安装部2114、第三子安装部2115可为承载主体211上设置的安装槽,以便在安装槽内安装压电马达模组212时,减小第一承载件21与移动件23之间的距离,减小摄像头模组100在光轴z上的长度。当然,子安装部例如第一子安装部2113、第二子安装部2114、第三子安装部2115也可以为其他结构例如安装架、卡接结构、插接结构、卡扣结构、螺接结构等,不作赘述。
51.可以理解地,在其他实施例中,上述实施例中的名称“第一子安装部”、“第二子安装部”、“第三子安装部”以及“子安装部”可以相互转换。例如,“第一子安装部”可以转换为“第二子安装部”,而相应地,“第二子安装部”可以转换为“第一子安装部”。
52.在一些实施例中,子安装部例如第一子安装部2113、第二子安装部2114和第三子安装部2115也可以直接省略,压电马达模组212直接通过粘接、焊接等方式固定在承载主体211朝向第二承载件22一侧的表面上。
53.在一实施例中,第一子安装部2113、第二子安装部2114和第三子安装部2115作为顶点进行相互之间连线可形成三角形,以便稳固安装移动件23。在一些实施例中,在子安装部可以减少的情况下,相应被减少的子安装部可用其他结构例如滑轨、支撑结构等进行替代。即,子安装部的数量可为一个或两个。在一实施例中,第二子安装部2114与第三子安装部2115对称设置在第一透光孔2111的两侧。在一实施例中,第一子安装部2113、第二子安装部2114和第三子安装部2115作为顶点进行相互之间连线形成的三角形可为等腰三角形或正三角形,即,第一子安装部2113分别到第二子安装部2114、第三子安装部2115的距离相等。
54.请参阅图5、图7、图8和图9,压电马达模组212可包括多个压电马达例如第一压电马达2121、第二压电马达2122、第三压电马达2123等。压电马达的数量可根据稳固安装移动件23的需求确定。在一些实施例中,压电马达例如第一压电马达2121安装在子安装部例如第一子安装部2113上。在一些实施例中,压电马达例如第二压电马达2122安装在子安装部例如第二子安装部2114上。在一些实施例中,压电马达例如第三压电马达2123安装在子安装部例如第三子安装部2115上。在一些实施例中,压电马达例如第一压电马达2121、第二压电马达2122、第三压电马达2123可直接通过粘接、焊接、卡接等方式固定在承载主体211朝向第二承载件22一侧的表面上。
55.可以理解地,在其他实施例中,上述实施例中的名称“第一压电马达”、“第二压电
马达”、“第三压电马达”以及“压电马达”可以相互转换。例如,“第一压电马达”可以转换为“第二压电马达”,而相应地,“第二压电马达”可以转换为“第一压电马达”。
56.在一实施例中,压电马达例如第一压电马达2121、第二压电马达2122、第三压电马达2123安装在承载主体211上时,基于第一子安装部2113、第二子安装部2114和第三子安装部2115的布局设置,可在第一压电马达2121、第二压电马达2122、第三压电马达2123作为顶点进行相互之间连线可形成三角形,以便稳固安装移动件23。在一些实施例中,在压电马达可以减少的情况下,相应被减少的压电马达可用其他结构例如滑轨、支撑结构等不影响移动件23移动和/或转动的结构来进行替代。即,在压电马达可以稳固支撑移动件23的情况下,压电马达的数量可为两个。当然,压电马达数量也可增加。在一实施例中,第二压电马达2122和第三压电马达2123对称设置在第一透光孔2111的两侧。在一实施例中,第一压电马达2121、第二压电马达2122和第三压电马达2123作为顶点进行相互之间连线形成的三角形可为等腰三角形或正三角形,即,第一压电马达2121分别到第二压电马达2122、第三压电马达2123的距离相等。
57.在一实施例中,压电马达的数量与子安装部的数量一一对应,对于相对应的压电马达与子安装部,压电马达安装在子安装部内。
58.请参阅图6和图7、图8、图9,压电马达例如第一压电马达2121可用于驱动移动件23在第三方向上滑动。压电马达例如第二压电马达2122可用于驱动移动件23在第二方向上滑动。压电马达例如第三压电马达2123可用于驱动移动件23在第二方向上滑动,进而可实现移动件23在移动平面上移动和/或转动。在一实施例中,第一方向与第二方向成夹角。在一实施例中,第一方向与第二方向成夹角的度数可大于0,小于等于90
°
。
59.可以理解地,压电马达例如第二压电马达2122页可用于驱动移动件23在移动平面上的其他方向例如第四方向上滑动。压电马达例如第三压电马达2123也可用于驱动移动件23在在移动平面上的其他方向例如第五方向上滑动。其中,第四方向及第五方向在某些情况下可与第二方向平行或垂直。
60.另外,在其他实施例中,上述实施例中的名称“第一方向”、“第二方向”、“第三方向”、“第四方向”、“第五方向”以及“方向”可以相互转换。例如,“第一方向”可以转换为“第二方向”,而相应地,“第二方向”可以转换为“第一方向”。
61.压电马达例如第一压电马达2121、第二压电马达2122、第三压电马达2123可包括置于子安装部例如安装槽内的驱动件2124以及与驱动件2124配合的弹性件2125。驱动件2124与移动件23抵接,以驱动移动件23滑动,实现光学防抖功能。驱动件2124可在子安装部例如安装槽的限定下在光轴z上滑动,弹性件2125用于提供并调节驱动件2124与移动件23的抵接力,以使得驱动件2124与移动件23良好接触。
62.驱动件2124可置于子安装部例如安装槽内实现与承载主体211的卡接限位,以在光轴z上滑动。当然,在子安装部为其他结构时,也可以实现驱动件2124与承载主体211的卡接限位,不作赘述。
63.驱动件2124可在通电后产生振动,带动移动件23在运动例如往复运动。
64.驱动件2124可包括振动部2126以及设置在振动部2126上且与移动件23抵接的摩擦部2127。振动部2126可与弹性件2125抵接。
65.振动部2126在通电后产生微幅振动,以带动摩擦部2127运动。
66.振动部2126可由压电陶瓷或、压电单晶等一种或多种压电材料制成,其可以是单层陶瓷或多层陶瓷。在一实施例中,振动部2126可由锆钛酸铅基压电陶瓷、铌酸钾钠基压电陶瓷、钛酸钡基压电陶瓷、铌镁酸铅-铌铟酸铅基压电单晶或织构陶瓷等一种或多种材料制成。振动部2126可在逆压电效应的控制下实现振动。
67.振动部2126的表面设置有电极触点以便于对振动部2126通电,对振动部2126施加控制信号,控制振动部2126振动。
68.摩擦部2127与移动件23抵接,以在振动部2126微幅振动时与移动件23产生摩擦,带动移动件23在运动例如往复运动。摩擦部2127可为硬性材料制成,也可为耐磨材料。在一实施例中,摩擦部2127可以由氧化铝、氧化硅、氧化锆、碳纤维或聚酯纤维等一种或多种耐磨材料制成,以提高摩擦部2127的使用寿命,保持驱动件2124例如摩擦部2127和移动件23的配合精度。摩擦部2127的形状可以为圆柱形,球形、三角锥形或其他形状。摩擦部2127可以设置在振动部2126朝向移动件23的一侧。
69.弹性件2125可采用具有弹性的材料制成。弹性件2125分别与承载主体211、驱动件2124例如振动部2126抵接,以对驱动件2124例如振动部2126施加弹性作用力。在一实施例中,弹性件2125可为弹簧、扭簧,当然也可以为其他具有弹性形变的结构,在此不做赘述。在一些实施例中,弹性件2125例如弹簧、扭簧的一端与承载主体211抵接,另一端与驱动件2124例如振动部2126抵接,以使得驱动件2124例如振动部2126可在弹性作用力下滑动。
70.在一实施例中,弹性件2125可为框架结构或片状结构,当然也可以为其他结构。弹性件2125固定在承载主体211上,弹性件2125可用于设置驱动件2124例如振动部2126,以使得驱动件2124例如振动部2126固定安装在弹性件2125上。在一实施例中,在弹性件2125可以独立实现固定驱动件2124例如振动部2126的情况下,并不需要子安装部例如安装槽对驱动件2124例如振动部2126的卡接限位或安装。即驱动件2124例如振动部2126也可通过弹性件2125间接安装在第一承载件21例如承载主体211靠近移动件23的一侧。
71.在一实施例中,压电马达模组212可不作为第一承载件21的一部分。
72.请参阅图4、图10、图11和图12,图10为图3所示实施例中防抖组件20在线
ⅹ‑ⅹ
的剖视图,图11为图3所示实施例中防抖组件20在线
ⅺ‑ⅺ
的剖视图,图12为图6所示实施例中防抖组件20在线
ⅻ‑ⅻ
的剖视图。第二承载件22可包括设置在移动件23远离第一承载件21例如承载主体211的一侧且用于与移动件23滑动连接的承载本体221。
73.承载本体221可采用硬性材料制成,整体可呈框架结构,当然也可以为壳体状结构。承载本体221整体结构可通过板材冲压形成,也可以通过浇铸形成、热塑成型,当然也可以通过其他方式形成。
74.承载本体221可安装在第一壳体10上。在一些实施例中,承载本体221可与第一壳体10为一体结构。在一些实施例中,承载本体221可安装在第一承载件21上。即,在某些场景中,承载本体221可通过第一承载件21间接安装在第一壳体10上。可以理解地,第二承载件22例如承载本体221可与第一承载件21例如承载主体211安装在一起,进而可组成防抖壳体60。在一实施例中,第二承载件22例如承载本体221可与第一承载件21例如承载主体211为一体结构。
75.承载本体221中部设置让位孔2211,以对感光件30让位。在一些实施例中,让位孔2211可以省略。
76.承载本体221朝向第一承载件21例如承载主体211的一侧设置装配部2212,以用于安装位置检测组件24。
77.请参阅图4、图10、图11和图12,装配部2212可包括多个子装配部,例如第一子装配部2213、第二子装配部2214和第三子装配部2215等。子装配部的数量可依据位置检测组件24的需求确定。子装配部例如第一子装配部2213、第二子装配部2214、第三子装配部2215可为承载本体221上设置的安装槽,以便在安装槽内安装位置检测组件24时,减小第二承载件22与移动件23之间的距离,减小摄像头模组100在光轴z上的长度。当然,子装配部例如第一子装配部2213、第二子装配部2214、第三子装配部2215也可以为其他结构例如安装架、卡接结构、插接结构、卡扣结构、螺接结构等,不作赘述。在一些实施例中,子装配部例如第一子装配部2213、第二子装配部2214和第三子装配部2215也可以直接省略,位置检测组件24直接通过粘接、焊接、卡接等方式固定在承载本体221朝向第一承载件21例如承载主体211一侧的表面上。
78.可以理解地,在其他实施例中,上述实施例中的名称“第一子装配部”、“第二子装配部”、“第三子装配部”以及“子装配部”可以相互转换。例如,“第一子装配部”可以转换为“第二子装配部”,而相应地,“第二子装配部”可以转换为“第一子装配部”。
79.在一实施例中,第一子装配部2213、第二子装配部2214和第三子装配部2215作为顶点进行相互之间连线可形成三角形。在一些实施例中,在子装配部可以减少的情况下,相应被减少的子装配部可用其他结构例如滑轨、支撑结构等可稳固安装移动件23的结构进行替代。即,子装配部的数量可为一个或两个。在一实施例中,第二子装配部2214与第三子装配部2215对称设置在让位孔2211的两侧。在一实施例中,第一子装配部2213、第二子装配部2214和第三子装配部2215作为顶点进行相互之间连线形成的三角形可为等腰三角形或正三角形,即,第一子装配部2213分别到第二子装配部2214、第三子装配部2215的距离相等。
80.在一实施例中,第一子装配部2213与第一压电马达2121邻近设置。在一实施例中,第二子装配部2214与第二压电马达2122邻近设置。在一实施例中,第三子装配部2215与第三压电马达2123邻近设置。
81.在一实施例中,承载本体221的边缘设置连接部222,以便与第一承载件21例如承载主体211连接。在一实施例中,连接部222可与第一承载件21例如承载主体211通过卡接结构、插接结构、卡扣结构、焊接结构等方式连接固定。
82.请参阅图4和图5,移动件23可置于第一承载件21例如承载主体211与第二承载件22例如承载本体221之间。移动件23可包括与压电马达模组212例如摩擦部2127抵接且与第二承载件22例如承载本体221滑动连接的装配本体231。装配本体231可在与压电马达模组212例如摩擦部2127抵接下,以在压电马达模组212例如摩擦部2127的作用下移动。装配本体231可用于安装感光件30,以在装配本体231移动和/或转动时,实现光学防抖。
83.可以理解地,装配本体231可在与第二承载件22例如承载本体221滑动连接的情况下,实现在防抖壳体60内的稳固安装。在一些实施例中,装配本体231可在压电马达模组212例如摩擦部2127与第二承载件22例如承载本体221的夹设下,实现在防抖壳体60内的稳固安装。
84.装配本体231可采用硬性材料制成,整体可呈框架结构,整体结构可通过板材冲压形成,也可以通过浇铸形成,当然也可以通过其他方式形成。装配本体231中部设置第二透
光孔2311,以与第一透光孔2111相对设置,使得透过第一透光孔2111的光线再次透过,以传输至感光件30。
85.可以理解地,在其他实施例中,上述实施例中的名称“第一透光孔”、“第二透光孔”以及“透光孔”可以相互转换。例如,“第一透光孔”可以转换为“第二透光孔”,而相应地,“第二透光孔”可以转换为“第一透光孔”。
86.装配本体231在第二透光孔2311处安装感光件30。
87.装配本体231在朝向压电马达模组212例如摩擦部2127的一侧可设置摩擦片,以在压电马达模组212例如摩擦部2127与摩擦片抵接时,提升压电马达模组212例如摩擦部2127与装配本体231之间的静摩擦力。即装配本体231在与压电马达模组212例如摩擦部2127抵接的部位可设置摩擦片。在一实施例中,在装配本体231表面足够粗糙时,摩擦片可省略。在一实施例中,摩擦片与装配本体231为一体结构。
88.装配本体231在朝向第二承载件22例如承载本体221的一面设置滑动组件2312,以使得装配本体231与第二承载件22例如承载本体221滑动连接,并在滑动组件2312与压电马达模组212的作用下使得装配本体231相对于第二承载件22例如承载本体221滑动。
89.请参阅图5、图10、图11和图12,滑动组件2312可包括多个滑动模组例如第一滑动模组2313、第二滑动模组2314、第三滑动模组2315等。滑动模组的数量可根据装配本体231与第二承载件22例如承载本体221稳固安装的需求确定。在一些实施例中,滑动模组例如第一滑动模组2313、第二滑动模组2314、第三滑动模组2315可与压电马达模组212邻近设置,以共同配合对装配本体231进行整体支撑。在一些实施例中,第一滑动模组2313与第一压电马达2121邻近设置。在一些实施例中,第二滑动模组2314与第二压电马达2122邻近设置。在一些实施例中,第三滑动模组2315与第三压电马达2123邻近设置。
90.可以理解地,在其他实施例中,上述实施例中的名称“第一滑动模组”、“第二滑动模组”、“第三滑动模组”以及“滑动模组”可以相互转换。例如,“第一滑动模组”可以转换为“第二滑动模组”,而相应地,“第二滑动模组”可以转换为“第一滑动模组”。
91.在一实施例中,滑动模组例如第一滑动模组2313、第二滑动模组2314、第三滑动模组2315安装在装配本体231上时,可在第一滑动模组2313、第二滑动模组2314、第三滑动模组2315作为顶点进行相互之间连线可形成三角形,以便稳固安装移动件23。
92.在一些实施例中,在滑动模组数量可以稳固支撑移动件23的情况下,滑动模组数量也可增加或减少。在一实施例中,第二滑动模组2314和第三滑动模组2315对称设置在第二透光孔2311的两侧。在一实施例中,第一滑动模组2313、第二滑动模组2314、第三滑动模组2315作为顶点进行相互之间连线形成的三角形可为等腰三角形或正三角形,即,第一滑动模组2313分别到第二滑动模组2314、第三滑动模组2315的距离相等。
93.滑动模组例如第一滑动模组2313、第二滑动模组2314、第三滑动模组2315可包括设置在装配本体231上的限位轨道2316以及设置在限位轨道2316内的滑动件2317。限位轨道2316用于限定滑动件2317的滑动范围。滑动件2317置于第二承载件22例如承载本体221与移动件23例如装配本体231之间,以减少第二承载件22例如承载本体221与移动件23例如装配本体231之间的接触面积,提高第二承载件22例如承载本体221与移动件23例如装配本体231相对滑动的灵活性。
94.限位轨道2316可为限位凸起、限位凹槽等结构。在一些实施例中,限位轨道2316可
由多个滑轨或多个滑块组成。在一实施例中,滑动件2317可为滚珠,以置于第二承载件22例如承载本体221与移动件23例如装配本体231之间。在一实施例中,滑动件2317可与移动件23例如装配本体231为一体结构,例如滑动件2317具有一滑动面,以与第二承载件22例如承载本体221接触。
95.可以理解地,在一实施例中,限位轨道2316可以省略。在一实施例中,限位轨道2316可不设置在移动件23例如装配本体231上,而设置在第二承载件22例如承载本体221上。在一些实施例中,滑动件2317可与第二承载件22例如承载本体221为一体结构,例如滑动件2317具有一滑动面,以与移动件23例如装配本体231接触。
96.请参阅图4、图5、图10、图11和图12。位置检测组件24可安装在第二承载件22例如承载本体221与移动件23例如装配本体231之间,以检测移动件23例如装配本体231相对于第二承载件22例如承载本体221的位置姿态信息,进而实现对压电马达模组212的控制,使得移动件23例如装配本体231移动恰当的位置一适合的姿态,进行光学防抖。
97.位置检测组件24可包括多个检测模组例如第一检测模组241、第二检测模组242、第三检测模组243等。检测模组的数量可根据需求确定。在一些实施例中,检测模组例如第一检测模组241安装在子装配部例如第一子装配部2213上。在一些实施例中,检测模组例如第二检测模组242安装在子装配部例如第二子装配部2214上。在一些实施例中,检测模组例如第三检测模组243安装在子装配部例如第三子装配部2215上。在一些实施例中,检测模组例如第一检测模组241、第二检测模组242、第三检测模组243可直接通过粘接、焊接、卡接等方式固定在第二承载件22例如承载本体221朝向移动件23一侧的表面上。
98.可以理解地,在其他实施例中,上述实施例中的名称“第一检测模组”、“第二检测模组”、“第三检测模组”以及“检测模组”可以相互转换。例如,“第一检测模组”可以转换为“第二检测模组”,而相应地,“第二检测模组”可以转换为“第一检测模组”。
99.在一实施例中,检测模组例如第一检测模组241、第二检测模组242、第三检测模组243安装在承载本体221例如子装配部上时,基于第一子装配部2213、第二子装配部2214、第三子装配部2215的布局设置,可在第一检测模组241、第二检测模组242、第三检测模组243作为顶点进行相互之间连线可形成三角形,以便准确判断移动件23的具体位置姿态信息。在一些实施例中,在检测模组可以实现对位置姿态信息获取的情况下,可以减少数量,当然检测模组数量也可增加。在一实施例中,第二检测模组242和第三检测模组243对称设置在第二透光孔2311、让位孔2211的两侧。在一实施例中,第一检测模组241、第二检测模组242和第三检测模组243作为顶点进行相互之间连线形成的三角形可为等腰三角形或正三角形,即,第一检测模组241分别到第二检测模组242、第三检测模组243的距离相等。在一实施例中,检测模组的数量与子装配部的数量一一对应,相对应的检测模组与子装配部中,检测模组安装在子装配部内。
100.检测模组例如第一检测模组241、第二检测模组242、第三检测模组243可包括设置在第二承载件22例如子装配部内的磁性件2411以及设置在移动件23例如装配本体231上且用于检测磁性件2411磁场变化的霍尔传感器2412。
101.移动件23例如装配本体231相对于第二承载件22移动或转动时,使得磁性件2411与霍尔传感器2412之间的距离发生变化,使得霍尔传感器2412处于磁性件2411产生磁场的不同位置,进而检测到的磁场强度将发生变化。因此可以通过霍尔传感器2412来感测移动
件23例如装配本体231相对于第二承载件22的位置信息。
102.检测模组例如第一检测模组241、第二检测模组242、第三检测模组243可不仅限于磁性件2411与霍尔传感器2412的配合关系,还可以为其他,不作赘述。
103.可以理解的,对于防抖组件20,在一些实施例中,第二承载件22可采用第一承载件21的设置方式进行设置,而相应地,第一承载件21采用第二承载件22的设置方式设置。即,第二承载件22可设置在移动件23靠近透镜组件300的一侧,而第一承载件21可设置在移动件23远离透镜组件300的一侧。
104.另外,位置检测组件24可采用设置在第二承载件22与移动件23之间的方式设置在第一承载件21与移动件23之间,具体可参阅上述实施例。
105.再者,磁性件2411的安装位置与霍尔传感器2412的安装位置可以互换。
106.请参阅图2,感光件30可包括安装在移动件23例如装配本体231的第二透光孔2311处的光传感器31、伸入第一容纳空间101内与光传感器31电连接的电路走线32以及设置在移动件23例如装配本体231的第二透光孔2311处的滤光片33。其中,滤光片33用于接收并透过透镜组件300传递来的光线。光传感器31用于接收滤光片33传递来并第二透光孔2311的光线。光传感器31用于感测光线,生成电信号,通过电路走线32将电信号传递出去,完成拍照、摄像。光传感器31及滤光片33可随移动件23例如装配本体231移动或转动,
107.在一实施例中,光传感器31设置在移动件23例如装配本体231靠近第一承载件21的一侧,并与第一透光孔2111、第二透光孔2311相对设置。在一实施例中,滤光片33设置在移动件23例如装配本体231远离第一承载件21的一侧,并与第一透光孔2111、第二透光孔2311相对设置。
108.在一实施例中,电路走线32可与压电马达模组212例如压电马达的驱动件2124电连接,以实现对压电马达模组212例如第一压电马达2121、第二压电马达2122及第三压电马达2123的控制。
109.在一实施例中,电路走线32可与位置检测组件24例如检测模组的霍尔传感器2412电连接,以获取到移动件23的位置姿态信息。
110.请参阅图4、图5和图13,图13为图1所示实施例中防抖组件20的俯视图。移动件23安装在第一承载件21和第二承载件22之间,第一承载件21和第二承载件22的连接可形成防抖壳体60。第一压电马达2121、第二压电马达2122和第三压电马达2123配合驱动移动件23。第一压电马达2121驱动移动件23在第三方向上滑动,第二压电马达2122和第三压电马达2123驱动移动件23在第一方向上滑动。可以理解地,第一压电马达2121的数量、第二压电马达2122的数量和第三压电马达2123的数量可不仅限于在此列举的数量
111.在仅第一压电马达2121作用于移动件23时,可驱动移动件23在第三方向上滑动。
112.在仅第二压电马达2122和第三压电马达2123作用于移动件23时,可驱动移动件23在第二方向同向滑动。
113.在仅第二压电马达2122和第三压电马达2123作用于移动件23时,第二压电马达2122可驱动移动件23在第二方向例如向左滑动,第二压电马达2122可驱动移动件23在第二方向例如向右滑动,进而实现移动件23的转动。
114.在第一压电马达2121、第二压电马达2122和第三压电马达2123同时作用于移动件23时,可驱动移动件23移动或转动。
115.在图13中,移动件23可因第一检测模组241、第二检测模组242、第三检测模组243的设置而具有与第一压电马达2121相对应的第一检测点a、与第二压电马达2122相对应的第二检测点b以及与第三压电马达2123相对应的第三检测点c。以通过对第一检测点a、第二检测点b以及第三检测点c三个检测点各自的位置变化信息的检测,而通过三点定位原理,实现对移动件23位置姿态信息的检测。
116.请参阅图1和图2,透镜组件300可包括具有第二容纳空间102的第二壳体40以及安装在第二容纳空间102内的透镜模组50。第二壳体40可与感光组件200例如第一壳体10连接在一起。透镜模组50用于接收进入第二容纳空间102内的光线并使光线透过,透镜模组50可用于对光线进行聚焦。透过透镜模组50的光线可传输至第一容纳空间101内被感光件30感测,以完成拍照、摄像。
117.在一实施例中,第一壳体10和第二壳体40可连接形成摄像头壳体70。在一实施例中,第一壳体10和第二壳体40可为一体结构。
118.可以理解地,在其他实施例中,上述实施例中的名称“第一壳体”、“第二壳体”、“摄像头壳体”以及“壳体”可以相互转换。例如,“第一壳体”可以转换为“第二壳体”,而相应地,“第二壳体”可以转换为“第一壳体”。
119.另外,在其他实施例中,上述实施例中的名称“第一容纳空间”、“第二容纳空间”以及“容纳空间”可以相互转换。例如,“第一容纳空间”可以转换为“第二容纳空间”,而相应地,“第二容纳空间”可以转换为“第一容纳空间”。
120.透镜模组50具有正屈光力。透镜模组50能够对光线进行聚焦,并对光线进行像差校正。透镜模组50可包括至少一个透镜。其中,透镜可为正透镜或负透镜。透镜可采用塑料或玻璃制成,其表面面型可以是球面或非球面。
121.可以理解地,本说明书的“具有正屈光力的~组件”表示组整体具有正屈光力。相同地“具有负屈光力的~组件”表示组整体具有负屈光力。“具有正屈光力的透镜”与“正透镜”含义相同。“具有负屈光力的透镜”与“负透镜”含义相同。“~透镜组件”并不限于包括多个透镜的结构,也可以设为仅包括1片透镜的结构。
122.另外,第二壳体40内也可设置一个防抖组件20,而透镜模组50可安装在移动件23的第二透光孔2311处,使得光线透过第一透光孔2111、透镜模组50(第二透光孔2311)及让位孔2211,再传递至感光组件200,当然,也可以使得光线透过让位孔2211、透镜模组50(第二透光孔2311)及第一透光孔2111,再传递至感光组件200。
123.接下来阐述一种电子设备。该电子设备可安装上述实施例中摄像头模组100,以将摄像头模组100作为前置摄像头或后置摄像头使用。
124.作为在此使用的“电子设备”(或简称为“终端”)包括,但不限于被设置成经由有线线路连接(如经由公共交换电话网络(pstn)、数字用户线路(dsl)、数字电缆、直接电缆连接,以及/或另一数据连接/网络)和/或经由(例如,针对蜂窝网络、无线局域网(wlan)、诸如dvb-h网络的数字电视网络、卫星网络、am-fm广播发送器,以及/或另一通信终端的)无线接口接收/发送通信信号的装置。被设置成通过无线接口通信的通信终端可以被称为“无线通信终端”、“无线终端”或“移动终端”。移动终端的示例包括,但不限于卫星或蜂窝电话;可以组合蜂窝无线电电话与数据处理、传真以及数据通信能力的个人通信系统(pcs)终端;可以包括无线电电话、寻呼机、因特网/内联网接入、web浏览器、记事簿、日历以及/或全球定位
系统(gps)接收器的pda;以及常规膝上型和/或掌上型接收器或包括无线电电话收发器的其他电子装置。手机即为配置有蜂窝通信模块的电子设备。
125.请参阅图14,图14为本技术一实施例电子设备的结构示意图。本技术实施例提供的电子设备400可以是手机、平板电脑、笔记本电脑以及智能手表等具有拍摄功能的设备。下面以电子设备400为手机进行如下说明。
126.请参阅图14,电子设备400可包括设置容置空间4010的机壳401、设置在机壳401上的显示屏组件402以及安装在容置空间4010内的摄像头模组100。
127.显示屏组件402与机壳401连接。在一些实施例中,显示屏组件402与机壳401可以共同围设形成有容置空间4010。摄像头模组100可以设置于容置空间4010内,其可以用于接收进入容置空间4010内的光线进行拍照、摄像。电子设备400可通过摄像头模组100实现防抖功能及调焦功能。
128.具体地,显示屏组件402可以用于为电子设备400提供图像显示功能,且当用户利用电子设备400进行拍照、摄像时,显示屏组件402还可以呈现摄像头模组100的成像画面,以便于用户进行拍摄。
129.机壳401内的容置空间4010可安装处理器、扬声器、传感器、电池等电子元件。其中,处理器可与显示屏组件402、电路走线32电连接,以控制显示屏组件402及摄像头模组100。
130.摄像头模组100可以设置于置容置空间4010内进行前置摄像或后置摄像。在一些实施例中,摄像头模组100作为前置摄像头时,可位于显示屏组件402下。即摄像头模组100在显示屏组件402上的正投影位于显示屏组件402上。
131.接下来阐述一种电子设备,请参阅图15,图15为本技术一实施例中电子设备500的结构组成示意图。该电子设备500可以为手机、平板电脑、笔记本电脑以及可穿戴设备等。本实施例图示以手机为例。该电子设备500的结构可以包括rf电路510、存储器520、输入单元530、显示单元540(即上述实施例中的显示屏组件402)、传感器550、音频电路560、wifi模块570、处理器580以及电源590等。其中,rf电路510、存储器520、输入单元530、显示单元540、传感器550、音频电路560以及wifi模块570分别与处理器580连接。电源590用于为整个电子设备500提供电能。
132.具体而言,rf电路510用于接发信号。存储器520用于存储数据指令信息。输入单元530用于输入信息,具体可以包括触控面板5301以及操作按键等其他输入设备5302。显示单元540则可以包括显示面板5401(即上述实施例中的显示屏组件402)等。传感器550包括红外传感器、激光传感器、位置传感器(例如位置检测组件24)等,用于检测用户接近信号、距离信号、移动件23的位置姿态信息等。传感器550还可包括上述实施例中光传感器31、霍尔传感器2412。扬声器5601以及传声器(或者麦克风,或者受话器组件)5602通过音频电路560与处理器580连接,用于接发声音信号。wifi模块570则用于接收和发射wifi信号。处理器580用于处理电子装置的数据信息。
133.在一实施例中,电子设备500还可以包括上述实施例中的摄像头模组100。摄像头模组100与处理器580通过电路走线32电连接,以在处理器580的控制下完成拍照摄像,完成光学防抖。
134.在一些实施例中,传感器550例如位置检测组件24可用于测量移动件23的位置姿
态信息。处理器可接收并响应位置姿态信息,而控制移动件23移动和/转动以完成光学防抖。
135.在本技术所提供的几个实施方式中,应该理解到,所揭露的设备,可以通过其他的方式实现。例如,以上所描述的设备实施方式仅仅是示意性的,例如,模块或单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
136.作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施方式方案的目的。
137.另外,在本技术各个实施方式中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
138.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1