一种量子增强远距时钟同步方法及系统
1.本发明属于量子增强时间同步技术,具体涉及一种量子增强远距时钟同步方法及系统。
背景技术:
2.时钟同步为共同进行一项活动的各方提供统一的时间标准,并在此标准下有效、准确地完成其活动。以导航活动为例,时间同步尤其重要,因为对于快速移动的运行体,导航数据更新率必须与运行体速度相匹配方可实现有效导航,而准确匹配的实时导航数据必须以各方时间同步为前提。传统的导航时钟同步精度受经典电磁波信号带宽的限制,精度上限为纳秒级,在理论与技术上均难以实现更高精度的导航活动。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种量子增强远距时钟同步方法及系统。
4.本发明的第一个目的是提供一种量子增强远距时钟同步系统,包括:
5.腔电光力转换器1,用于生成微波-光波纠缠信号;
6.微波波导喇叭天线ant1,用于将生成的微波-光波纠缠信号中的微波信号辐射到自由空间;
7.可调光纤,用于将生成的微波-光波纠缠信号中的光信号保留在本地;
8.微波波导喇叭天线ant3,用于接收微波信号并反射剩余部分的微波信号
9.微波波导喇叭天线ant2,用于接收反射的微波信号
10.腔电光力转换器2,用于将反射的微波信号上转换为光波信号
11.相共轭处理器,用于实现对光信号与光波信号的联合探测与时间精密测量,并将实时测量结果输出至计算机。
12.优选的,本发明提供的量子增强远距时钟同步系统还包括可编程门列阵器件fpga,用于存储微波信号的辐射到达时间,并将存储的时间加载到经典微波信号cw上。
13.优选的,本发明提供的量子增强远距时钟同步系统还包括微波波导喇叭天线ant4,用于发射加载有记录时间的经典微波信号cw。
14.优选的,本发明提供的量子增强远距时钟同步系统还包括微波波导喇叭天线ant5,用于接收经典微波信号cw并输出至计算机。
15.优选的,所述腔电光力转换器1和腔电光力转换器2的结构相同,所述腔电光力转换器1和腔电光力转换器2均包括微波腔、机械振子和光波腔,机械振子处于微波腔和光波腔之间,且机械振子分别与微波腔和光波腔连接。
16.本发明提供的第二个目的是提供一种量子增强远距时钟同步方法,包括以下步
骤:
17.s1、a时钟附近的腔电光力转换器1生成微波-光波纠缠信号,并通过微波波导喇叭天线ant1向自由空间中发射微波信号a时钟记录微波信号的发射时间ta,同时通过可调光纤将光信号保留在本地;
18.s2、b时钟附近的微波波导喇叭天线ant3接收微波信号并反射剩余部分的微波信号b时钟记录微波信号到达b地的时间tb,并将时间tb通过可编程门列阵器件fpga进行存储;
19.s3、a地通过微波波导喇叭天线ant2接收反射微波信号反射微波信号经腔电光力转换器2上转换为光信号通过相共轭处理器对光波信号和光信号进行一定时间tm的联合检测,实时测量结果输出至计算机,得到减法器输出并解算记下此时a地的a时钟的时刻t
a,d
;
20.s4、b地通过可编程门列阵器件fpga将存储的时间tb加载到经典微波信号cw上,并通过微波波导喇叭天线ant4将时间tb告知a地;
21.s5、a地通过微波波导喇叭天线ant5接收经典微波信号cw输出至计算机pc端解算得到时间tb。根据钟差表达式δt=(ta+t
a,d
)/2-tb计算两地时钟钟差,如果δt=0,则b地时钟与a地时钟间不存在钟差,反之则两者存在钟差;
22.s6、根据步骤s5中的钟差δt由控制电路自动完成a地时钟调整,得到新的a地时钟ta′
=t
a-δt;
23.s7、重复步骤s1至步骤s6,直至钟差小于等于同步精度,时钟同步完成。
24.本发明与现有技术相比,其有益效果在于:
25.(1)本发明所提出的量子增强时钟同步技术,利用微波-光波纠缠这一非经典特性有效提高了时钟同步的精度;
26.(2)本发明既保留了微波在自由空间的传输优势,增加了时钟同步的可行范围,又利用态转换技术解决了微波光子探测的难题,提升了探测效率,更有利于远距高精度时钟同步的实现;
27.(3)本发明利用腔电光力转换器产生的微波光子-机械声子-光波光子的强耦合效应实现微波-光波纠缠以及态转换,将微波信号辐射到自由空间远程传输到另一地,同时将光波信号保留在本地,反射微波信号返回本地时,经腔电光力转换器相共轭并上转换为光波信号,与本地保留的光波信号联合检测,测量结果与两地时钟记录时刻比对并确定钟差,将钟差补偿到本地时钟,完成与另一地的时钟校准,提高了时钟同步的精度,进而可提升导航定位、授时等应用能力。
附图说明
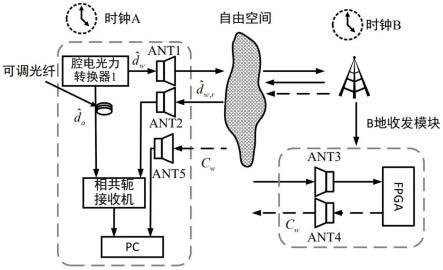
28.图1为本发明实施例提供的量子增强远距时钟同步系统的原理图;
29.图2为本发明实施例中的腔电光力转换器1用于制备微波-光波纠缠信号的原理图;
30.图3为本发明实施例中的腔电光力转换器2的微波-光波态转换原理图;
31.图4为本发明实施例中的相共轭处理器的检测原理图;
32.图5为本发明实施例提供的量子增强远距时钟同步系统的时钟同步精度和传输效率仿真示意图;
33.图6为不同传输效率下钟差测量精度随一次测量采样数据量m的变化图。
具体实施方式
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
35.如图1所示,本发明实施例提供的量子增强远距时钟同步系统,具体包括:
36.腔电光力转换器1,用于生成微波-光波纠缠信号;
37.微波波导喇叭天线ant1,用于将生成的微波-光波纠缠信号中的微波信号辐射到自由空间;
38.可调光纤,用于将生成的微波-光波纠缠信号中的光信号保留在本地;
39.微波波导喇叭天线ant3,用于接收微波信号并反射剩余部分的微波信号
40.微波波导喇叭天线ant2,用于接收反射的微波信号
41.腔电光力转换器2,位于相共轭处理器的内部,用于将反射的微波信号上转换为光波信号
42.相共轭处理器,用于实现对光信号与光波信号的联合探测与时间精密测量,并将实时测量结果输出至计算机。
43.本发明实施例提供的量子增强远距时钟同步系统还包括可编程门列阵器件fpga,用于存储微波信号的辐射到达时间,并将存储的时间加载到经典微波信号cw上。
44.本发明实施例提供的量子增强远距时钟同步系统还包括微波波导喇叭天线ant4,用于发射加载有记录时间的经典微波信号cw。
45.本发明实施例提供的量子增强远距时钟同步系统还包括微波波导喇叭天线ant5,用于接收经典微波信号cw并输出至计算机。
46.本发明实施例提供的量子增强远距时钟同步系统的原理具体是:
47.a时钟附近的腔电光力转换器1制备微波-光波纠缠信号,其中微波信号辐射到自由空间传输到b时钟附近,与纠缠的光信号通过可调光纤保留在本地;a时钟记录微波信号发射时间ta,当微波信号传输到b时钟附近时,记录b时钟此刻的时间tb,反射的微波信号反射回a时钟附近,经相共轭处理器相共轭并上转换为光波信号光波信号与a时钟保留的光信号进行联合探测,对微波信号在自由空间的传输时延进行精确测量,
并记录a时钟的反射到达时间t
a,d
,则钟差可表示为δt=(ta+t
a,d
)/2-tb。以b时钟为基准,将钟差补偿给a时钟使得a、b两时钟时间一致,则完成a、b两地时钟同步。
48.本发明实施例中的腔电光力转换器1和腔电光力转换器2的结构相同,腔电光力转换器1和腔电光力转换器2均包括微波腔、机械振子和光波腔,机械振子处于微波腔和光波腔之间,且机械振子分别与微波腔和光波腔连接。机械振子将微波腔和光波腔连接起来,使得微波腔中的微波信号和光波腔中的光学信号产生联系,实现微波信号到光学信号的转换或者产生微波信号和光学信号的纠缠。
49.如图2所示,本发明实施例中的腔电光力转换器1具体包含超导微波lc电路谐振腔、机械振子、光学f-p腔,其中机械振子既是微波腔电路中电容的一个可移动极板,又是光学f-p腔的一个可移动腔镜,通过这种特殊结构使得微波腔的谐振过程、光腔的谐振过程同时与机械振子的谐振过程相互作用,微波光子、光波光子均与机械声子相耦合,当转换器内部达到平衡时,腔模与机械振子谐振模式间的相互作用亦达到平衡,光子与声子间的能量交换稳定进行。当微波腔和光腔的频率失谐量满足δw=-δo=ωm时,光腔模与机械谐振模受波戈留波夫变换作用而发生双模压缩,从而形成纠缠,这里模是指量子力学中的信号模式。其中δw表示微波腔的腔谐振频率与驱动频率之差,δo表示光腔的腔谐振频率与驱动频率之差,ωm表示机械振子频率。随后机械谐振模与微波腔模发生态转移,由此形成了相互纠缠的光波腔模与微波腔模,当两腔的光力作用速率均大于机械振子退相干速率时,两腔模之间的纠缠特性将转移到两个输出模式上,使得与相互纠缠,具体可表示为:
[0050][0051]
其中,和分别表示微波腔和光腔输出信号的平均光子数。
[0052]
本发明实施例中对反射微波信号的探测基于微波-光波态转换以及光波单光子探测技术,微波-光波态转换通过腔电光力转换器2实现,腔电光力转换器2的工作原理如图3所示,微波腔和光腔的频率失谐量满足δw=δo=ωm,此时两腔均工作于态转移模式,反射微波信号入射到微波腔内形成微波腔模,通过分束器型光-声相互作用,微波腔模光子将能量转移给机械谐振模声子,机械谐振模声子又进一步通过分束器型光-声相互作用将能量转移到光波腔模光子中,形成稳定振荡后输出光波当转换效率接近1时即可实现微波量子态到光波量子态的转移。进而可通过测量光波信号实现对反射微波信号的探测。
[0053]
本发明实施例中采用相共轭处理器实现对与的探测与时间精密测量,其结构与信号检测流程如图4所示。微波信号在自由空间传输引入一定的噪声,利用分束器模型描述噪声对反射微波信号的影响,可表示为:
[0054][0055]
其中,表示微波信号在自由空间传输过程中引入的噪声,η表示微波信号传输效率,衡量微波信号在传输过程中的损耗,损耗越小,则η越大。经腔电光力转换器2相共轭
并上转换为光波量子态和分别从分束器的两个输入端in1和in2入射,两输出端out1和out2信号表示为:
[0056][0057][0058]
单光子探测器d1、d2分别对分束器输出端out1和out2的信号进行光子计数,其算符表示为:
[0059][0060][0061]
其中表示湮灭算符,表示产生算符,表示光子数算符。
[0062]
out1和out2端输出送入减法器计算当在可调光纤中传输距离同微波信号在自由空间的传输距离相同时,减法器输出最大值:
[0063][0064]
当传输距离不相等且小于一个微波波长时,可将反射微波信号引入相位表示为:
[0065][0066]
其中,e为自然常数,i是虚数单位,表示反射微波信号与光波信号在被相共轭处理器探测前的相位差;
[0067]
则减法器输出正比于其量测误差可通过误差传递函数表示为:
[0068][0069]
其中,表示对《n》求的导数,δn表示减法器输出的方差。
[0070]
通过测量减法器的输出可精确测量出相位差进而精确测量反射微波信号的到达时间t
a,d
,根据钟差表达式δt=(ta+t
a,d
)/2-tb调整b地时钟完成时钟同步。钟差的测量精度δt取决于对的准确测量,具体可表示为
[0071]
本发明实施例还提供了一种量子增强远距时钟同步方法,具体包括以下步骤:
[0072]
s1、a时钟附近的腔电光力转换器1生成微波-光波纠缠信号,并通过微波波导喇叭天线ant1向自由空间中发射微波信号a时钟记录微波信号的发射时间ta,同时通过可调光纤将光信号保留在本地;
[0073]
s2、b时钟附近的微波波导喇叭天线ant3接收微波信号并反射剩余部分的微波
信号b时钟记录微波信号到达b地的时间tb,并将时间tb通过可编程门列阵器件fpga进行存储;
[0074]
s3、a地通过微波波导喇叭天线ant2接收反射微波信号反射微波信号经腔电光力转换器2上转换为光信号通过相共轭处理器对光波信号和光信号进行一定时间tm的联合检测,实时测量结果输出至计算机,得到减法器输出并解算记下此时a地的a时钟的时刻t
a,d
;
[0075]
s4、b地通过可编程门列阵器件fpga将存储的时间tb加载到经典微波信号cw上,并通过微波波导喇叭天线ant4将时间tb告知a地;
[0076]
s5、a地通过微波波导喇叭天线ant5接收经典微波信号cw输出至计算机pc端解算得到时间tb。根据钟差表达式δt=(ta+t
a,d
)/2-tb计算两地时钟钟差,如果δt=0,则b地时钟与a地时钟间不存在钟差,反之则两者存在钟差;
[0077]
s6、根据步骤s5中的钟差δt由控制电路自动完成a地时钟调整,得到新的a地时钟ta′
=t
a-δt,控制电路具体指pid控制电路,通过反馈控制将δt调整为0;
[0078]
s7、要保持实时的同步,一次同步过程只能校正此次的钟差,要实现长期稳定的时钟同步需要不断的校正误差,所以重复步骤s1至步骤s6,直至钟差小于等于同步精度(衡量时钟同步是否完成的指标,当钟差小于该值时可以认为同步完成),时钟同步完成。
[0079]
下面通过实验获得的参数对本发明实施例提供的时钟同步方法作为验证,并给出相应的仿真结果。
[0080]
腔电光力转换器1和腔电光力转换器2的参数设定如下表1所示:
[0081]
表1电光力转换器1和2的参数设置
[0082][0083]
上表中电光力转换器的品质因数q=30
×
103。
[0084]
仿真环境参数设为:自由空间背景温度设为tb=293k,电光力转换器的工作温度设为t
eom
=30mk。腔电光力转换器eom1输出微波平均光子数输出光波平
均光子数自由空间环境噪声平均光子数单光子探测器d1和d2采用snspd超导纳米线单光子探测器,暗计数在10cps以下,计数率为50mhz。
[0085]
仿真软件为matlab 2018,数据分析软件为origin 9.1,完成仿真实验的计算机型号为thinkpad x1 yoga,处理器(cpu)型号为intel(r)core(tm)i7-10510 cpu@1.80ghz 2.30ghz,内存为16gb,显示适配器型号为intel(r)uhd graphics。
[0086]
基于上述参数,图5仿真分析了钟差测量精度同传输效率η的关系,通过图5可以看出,在传输效率较小,即η≤0.1时,随着传输效率的增加,反射微波信号携带的有效信息量越多,对时间的测量也越精确,因此δt逐渐降低。图6分析了不同传输效率下钟差测量精度随一次测量采样数据量m的变化图,通过图6可以看出,一次测量采样的点越多,获得的信息量越大,钟差测量也更加精确。在传输效率η=0.1,一次采样数据量m=105(一次测量时间为2ms),钟差测量精度δt=2.0824ps。当一次采样数据量提高到m=106(一次测量时间为20ms),钟差测量精度δt=0.65852ps。本发明在低传输效率(η≤0.1)时钟差测量精度可达皮秒量级,能有效应用于远距时钟同步,且增加两地距离,可通过延长一次测量时间有效提高时钟同步精度。
[0087]
综上所述,本发明实施例提供的量子增强时钟同步技术,利用微波-光波纠缠这一非经典特性有效提高了时钟同步的精度;而且既保留了微波在自由空间的传输优势,增加了时钟同步的可行范围,又利用态转换技术解决了微波光子探测的难题,提升了探测效率,更有利于远距高精度时钟同步的实现。
[0088]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1