一种基于用户轨迹预测的无人机基站动态部署方法
1.本发明属于通信技术领域,尤其涉及一种基于用户轨迹预测的无人机基站动态部署方法。
背景技术:
2.在互联网不断兴起的信息化时代,通信量呈爆炸式增长,丰富的多媒体业务向移动通信网络提出了更高的要求,需要更广的覆盖范围以及更可靠的服务质量。此外,受到人们日常生活的影响,移动网络的流量需求呈现出明显的时空不均匀特性,不同地区、不同时段对移动网络流量的需求有巨大差异。移动网络流量的急剧增长及流量需求时空不均匀特性给未来通信网络基站的部署造成了严峻的挑战。
3.现有的解决方案有异构网络(heterogeneous network,hetnet)与基站休眠相结合。在宏基站的基础上按需部署微基站,拉近与用户距离,提高频谱效率与吞吐量,减缓热点地区流量拥塞的问题,但其本质仍是依据该地区流量峰值进行的静态部署,在流量需求较小的时间段,会造成严重资源浪费;引入基站休眠技术后,根据流量需求于时间上的变化选择休眠或者唤醒基站,虽减少一定的运营支出,但是部署及维护成本依旧十分巨大。
4.无人机(unmanned aerial vehicle,uav)具有灵活性强,部署便利,开支较低和视距通信等优势,其搭载基站进行辅助通信为建立新的移动网络提供了可能性,也为解决上述问题提供了一种新思路。但是多无人机服务多用户情况下的无人机部署是一个非凸且np困难问题,传统通信方法难以解决,与此同时,由于用户处于不断移动当中,静止的无人机基站部署难以提供更好的服务,针对其移动情况,实时调整无人机基站位置,进行无人机基站的动态部署为较优的解决方法,但其具有一定的挑战性。
5.现有多无人机基站动态部署方法多数未考虑实际情况,将用户移动利用数学进行建模,未采用真实数据。而少数利用实际移动数据的部署方法,忽视了用户位置信息同步到无人机的滞后性,造成求解得出的部署方案并非为当下最优解。为解决该问题,有人提出对用户轨迹进行预测,利用预测得到的用户位置再进行基站位置的调整。但该方法采用的是单用户预测,为每个用户训练存储一个预测模型,工作量大,现实中部署不切实际。
技术实现要素:
6.针对上述问题,为满足流量时空分布不均匀条件下的用户需求,本发明提供了一种基于用户轨迹预测的无人机基站的部署方法,根据用户位置进行基站的动态部署,以达到约束条件下最大下行传输速率。同时,本发明考虑到用户的移动性以及用户位置信息同步到无人机的滞后性,提供一种新的用户轨迹预测方法,基于预测位置先一步进行基站位置计算,以实现对用户移动条件下的无人机基站实时部署,更满足实际需求。
7.本发明的一种基于用户轨迹预测的无人机基站动态部署方法,利用对用户轨迹的预测预先得知下一时隙用户位置分布,在此分布基础上计算无人机基站在下一时隙部署的最优位置。具体地,所述方法包括以下步骤:
8.s1:构建系统模型,利用无人机搭载基站为移动用户提供下行服务。
9.s2:预先训练用户轨迹预测模型,当用户进入无人机基站网络服务范围内触发轨迹预测算法,预测用户下一时隙位置。
10.用户轨迹预测模型预先训练存储,当调用时,直接利用用户所对应群组的轨迹预测模型进行下一时隙的位置预测。
11.本发明方法将轨迹相似的用户划分为一个群组,共用一个轨迹预测模型。利用vlcss(最长公共子向量)衡量两两用户之间轨迹的相似性。用户间轨迹相似度通过计算两轨迹的最长公共子向量与其中较长轨迹子向量数的比值得到。采用dbscan聚类算法对用户进行分组,将轨迹相似度达到设定阈值的用户归为一个群组。每个群组共用一个轨迹预测模型,对每个群组的轨迹预测模型进行训练。
12.s3:依据预测得到的用户位置分布,以下行链路信道传输总速率最大化为优化目标,得到多无人机基站的最优部署位置。
13.s4:各无人机移动到计算所得最优部署位置。
14.所述步骤s1中,无人机采用频分多址(fdma)的方式服务地面用户,与用户间为空对地(air-to-ground,atg)传输信道,其路径损耗模型采用混合模型。
15.所述步骤s2中,轨迹预测模型以长短时记忆网络(lstm)为基本结构,采用automl(auto machine learning)的方式,实现超参选择过程自动化,无需人工干预即可为给定任务生成高性能lstm,具体是:将lstm作为学生预测器,q-learning作为控制器,为学生lstm提出更好的架构,再添加迁移学习单元用以加速架构的搜索过程。
16.所述步骤s3中,无人机基站动态部署方法以用户位置为周期性输入,无人机基站的部署位置为输出,具体包括:采用迭代k-means算法计算用户簇中心得到无人机基站初始位置,在此位置周围构建搜索空间,以固定步长于该空间内搜索最优位置,使得所有无人机的总传输速率最大。
17.所述步骤s4中,无人机得到下一时隙最优位置后,无人机采用最小更新距离的方式进行移动。
18.相对于现有技术,本发明的有益效果在于:
19.(1)本发明方法在实现轨迹聚类过程中提供了一种新的轨迹相似度度量方法,解决了lcss(最长公共子序列)算法未考虑用户移动轨迹方向性的弊端。本发明通过改进的基于最长公共子序列算法计算轨迹间相似度,并进行用户轨迹聚类,每个群组共用一个轨迹预测模型,减少对不同模型的训练数量和计算量。
20.(2)本发明方法提供了一种用户轨迹预测方法,实现了预测精度与计算存储资源的均衡。本发明方法在每个时隙预先对多无人机基站服务场景内的多用户的位置进行预测,将用户位置同步到无人机,进而计算多无人机基站最优部署位置,解决了现有技术中忽视了用户位置信息同步到无人机的滞后性,导致求解得出的部署方案并非为当下最优解的问题;也避免了现有针对每个用户预先训练存储一个预测模型导致的工作量大,不切实际的问题。
21.(3)本发明方法对lstm轨迹预测模型采用自动参数选取,避免引入人工误差,使预测结果更加精确;同时,采用迁移学习减少训练时间,并对轨迹相似用户进行聚类,共用一个预测模型,减少了模型训练计算量与存储量。
22.(4)本发明方法在每个时隙求取多无人机基站的最优部署位置时,首先获取预测的各用户的位置,依据地面用户与无人机之间的通信距离最小获取初始无人机位置,然后再进行微调,使得所有无人机的总传输速率最大,最后获得多无人机最优部署位置。本发明方法实现了直接以多用户位置为输入,多无人机基站位置作为输出的无人机快速部署,避免了计算量大且耗时长的信道状态的估计与计算,且能够在用户移动条件下,快速动态调整位置,实现更优的下行数据服务。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
24.图1是本发明的基于用户轨迹预测的无人机基站部署方法的场景架构模型示意图;
25.图2是本发明提供的计算轨迹间相似度的示意图;
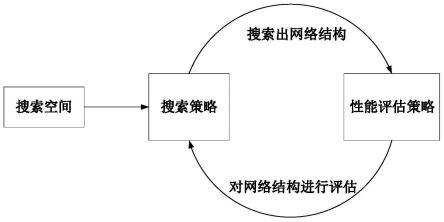
26.图3是本发明采用的神经架构自动搜索(nas)示意图;
27.图4是本发明的基于用户轨迹预测的无人机基站部署方法的流程示意图。
具体实施方式
28.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
29.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
30.目前在无人机基站部署方法中,动态部署尤其快速部署方法较少,且现有方法大多未考虑真实场景下的用户移动。本发明提供了一种基于用户轨迹预测的无人机基站动态部署方法,以预测得到的用户分布为周期性输入,达到最大下行传输速率,输出无人机基站最优位置,以实现无人机基站的动态快速部署。
31.如图1所示,本发明的一种基于用户轨迹预测的无人机基站部署方法的场景架构模型为:无人机搭载基站,为地面用户为提供下行服务,目标为在满足每个地面用户需求的条件下,动态部署无人机,即获取无人机在每个时隙的最佳位置,使得总传输速率最大,具体如下:
32.将多无人机部署在一个目标区域([0,l]
×
[0.m])内为地面用户提供无线通信服务,设该区域内有n个用户,k架无人机,无人机采用正交频分多址接入技术。
[0033]
地面用户n在t时刻的位置表示为un(t)=[xn(t),yn(t)];无人机k在t时刻的位置表示为pk(t)=[xk(t),yk(t)];地面用户n与无人机k之间的通信距离则表示为因此每架无人机k与所有用户间的距
离为其中,h为无人机k的飞行高度。
[0034]
无人机与地面用户间链路为空对地信道,信道模型为混合模型,由视距传输(los)和非视距传输(nlos)两种链路组合而成,公式表示为:
[0035]
pl=pl
los
×
pr
los
+pl
nlos
×
(1-pr
los
)
[0036]
其中,pl
los
表示视距路径损耗,pl
nlos
表示非视距路径损耗;pr
los
是无人机k与用户n之间的视距链路概率,其中,θ是用户与无人机间的仰角,a和b为环境参数。
[0037]
对于用户n,其与无人机k之间的仰角
[0038]
根据路径损耗模型可以将视距路径损耗和非视距路径损耗表示为:
[0039][0040][0041]
其中,μ
los
和μ
nlos
分别代表视距链路和非视距链路的路损系数,α为路损指数,f为载波频率,c为光速,d为路径长度。
[0042]
综上,则可以计算得出从无人机到用户的信道增益g,表示为:
[0043][0044]
为了评价无人机基站部署的优劣,本发明以下行链路信道传输总速率为衡量标准。若无人机k服务用户n,根据香农公式,该信道的传输速率r
k,n
可以表示为:
[0045][0046]
其中,b
k,n
为无人机k分配给用户n的带宽,m为正交子信道数量,b为无人机k的带宽;p
k,n
表示无人机k对用户n的传输功率;g
k,n
表示无人机k到用户n的信道增益;σ2为高斯白噪声功率。
[0047]
假设每个时隙无人机都可以飞到所需位置,则部署可以看作每个时隙的静态部署,优化目标可以表示为:
[0048][0049]
其中,r
sum
表示场景内所有无人机的总传输速率;ρ
k,n
表示用户与无人机的关联性,表示用户n是否接入无人机k,若接入,ρ
k,n
值取1,否则取0;r0为单用户连入网络需满足的最小速率。
[0050]
为减少用户轨迹预测模型的计算和存储量,本发明将轨迹相似的用户划分为群组,共用预测模型。
[0051]
如图2所示,本发明提供一种新的基于lcss(最长公共子序列)算法改进的衡量轨迹间相似度的算法,将轨迹的方向性纳入计算范围,具体如下:
[0052]
设两个用户u1和u2,其轨迹分别为t1与t2,轨迹由若干轨迹段组成,表示为向量集合;针对轨迹t1与t2,首先计算其公共子向量数vlcss(t1,t2)如下:
[0053][0054]
其中,v
u1
(i)和v
u2
(j)分别表示轨迹t1的i个向量段与轨迹t2的j个向量段;表示空集;γ为阈值常量;σ(v
u1
(i),v
u2
(j))表示两子向量v
u1
(i)和v
u2
(j)间的距离,计算如下:
[0055]
σ(v
u1
(i),v
u2
(j))=σ
θ
(v
u1
(i),v
u2
(j))
·
σd(v
u1
(i),v
u2
(j))
[0056]
其中,σ
θ
为向量间夹角,σd为向量两端点距离和。
[0057]
vlcss(v
u1
(i),v
u2
(j))是计算两用户的向量段v
u1
(i)和v
u2
(j)的公共子向量数。
[0058]
vlcss(v
u1
(i-1),v
u2
(j-1)、vlcss(v
u1
(i-1),v
u2
(j))和vlcss(v
u1
(i),v
u2
(j-1))分别是计算两用户的对应向量段的公共子向量数。
[0059]
则轨迹间相似度可用最长公共子向量占比定义,为
[0060]
其中,分别表示轨迹t1与t2的向量段数量。
[0061]
本发明实施例中,用户轨迹聚类采用基于密度的聚类算法—dbscan(density-based spatial clustering of applications with noise)聚类算法,该算法由密度可达关系导出最大密度相连的样本集合,形成聚类簇。密度可达关系在本发明中由d
vlcss
大于某一阈值确定。
[0062]
如图3所示,本发明采用神经架构搜索(nas)框架为lstm网络自动确定网络参数。nas框架具体包括:
[0063]
利用一定搜索策略在构建搜索空间中搜索出网络结构,并触发性能评估策略随网络性能进行评估,最后将评估结果反馈给搜索策略。如此迭代,自动搜寻最有网络架构。
[0064]
如图4所示,本发明的一种基于用户轨迹预测无人机基站动态部署方法,目标是动态部署uav(获得uav在每个时隙的最佳位置),以最大化r
sum
的同时满足每个地面用户的需求,包括以下步骤:
[0065]
s1:用户轨迹预测,包括以下子步骤s1-1~s1-5。用户在区域内存在历史轨迹。
[0066]
s1-1:截取用户轨迹。轨迹间相似度计算复杂度高,耗费计算时长,本发明实施例按照时间段将用户轨迹进行截取,截取t时长的轨迹,减少计算复杂度。
[0067]
s1-2:计算轨迹间相似度。本发明采用改进vlcss,在lcss的(最长公共子序列)基础上加以改进,考虑轨迹的方向性,将点点之间距离利用向量段之间的距离加以替换,计算最长公共子向量与较长轨迹子向量数的比值,从而得到轨迹间相似度。
[0068]
s1-3:轨迹聚类。采用dbscan聚类算法,将轨迹间相似度达到一定阈值条件视为密度可达,由此完成轨迹聚类,实现用户群组的划分。输入:包含n个用户轨迹对象的数据库,相似度阈值参数ε,每个轨迹相似群组最少用户数minpts;输出:所有达到密度要求的用户轨迹相似群组。
[0069]
由步骤s1-1至步骤s1-3可以实现群组划分,将轨迹相似的用户视为一个群组,共
用一个轨迹预测模型,实现模型训练计算量与存储资源的节约。轨迹预测模型以长短时记忆网络(lstm)为基本结构,lstm网络可以解决神经网络中长期依赖问题,广泛用于轨迹预测,以用户之前轨迹点为输入,预测下一时隙位置。
[0070]
s1-4:利用自动机器学习(automl)实现超参优化。采用nas架构,将lstm作为学生预测器,利用q-learning作为控制器,为lstm自动选取参数,搜索出更好的网络架构,避免引入人工误差。加入迁移学习(tl)单元用以加速架构的搜索过程。
[0071]
构建动作空间与参数空间,将lstm网络的准确率作为评价反馈信号。设置提前终止机制,将lstm达到90%(可以灵活设定)的预测精度时,停止搜索,否则,将在搜索完整个空间后终止;参数空间包括:隐藏层数量,每个隐藏层神经元数量,退出率等;采用relu函数作为激活函数。
[0072]
s1-5:采用迁移学习,加速架构搜索过程。两个lstm在层和连通性方面具有相似的体系结构,利用迁移学习,将迭代t-1时刻的训练知识转移到迭代t时刻,减少训练时长,达到快速收敛。
[0073]
由步骤s1-4至步骤s1-5可以完成用户轨迹预测模型的训练,通过此模型可以通过历史轨迹预测输出下一时隙位置,得到用户位置分布。
[0074]
s2:无人机基站动态部署,包括以下子步骤s2-1~s2-3。
[0075]
s2-1:k-means聚类算法。区域内由k架无人机,每一时隙将用户聚为k簇,每一用户簇采用一架无人机进行服务。利用k-means算法,可以得到k个用户簇且得到簇中心位置,即使得d
sum
最小时,无人机的位置,将该位置作为无人机的初始位置。
[0076]
对服务区域内的各用户利用对应群组的轨迹预测模型预测下一时隙的位置,然后同步给无人机。无人机基于所获得的多用户位置分布,利用k-means算法进行聚类,获得k架无人机的初始位置。
[0077]
s2-2:局部调优。传输速率不仅与距离有关,在s2-1得到的无人机初始位置基础上,以初始位置为中心,周围建立搜索空间,以固定步长搜索,传输速率达到最大时,即为无人机最优部署位置。
[0078]
s2-3:最小更新距离移动。无人机从t-1时隙位置到t时隙位置进行移动,采用最小更新距离的方法进行移动。
[0079]
最小更新距离的方法本质为两时刻无人机位置集合两两配对,递归调用,求解
[0080]
(x
t-1
,y
t-1
),(x
t
,y
t
)∈(l,m);
[0081]
其中,(x
t
,y
t
)表示t时隙无人机的部署位置,(x
t-1
,y
t-1
)表示t-1时隙无人机的部署位置,d
t-1,t
表示前后两时隙无人机的运动距离,(x
t-1
,y
t-1
),(x
t
,y
t
)∈(l,m)表示无人机移动前后均在目标区域内。
[0082]
经过以上步骤,即可完成用户轨迹预测得到用户位置分布,基于用户分布完成的传输速率最大化无人机基站部署。
[0083]
除说明书所述的技术特征外,均为本专业技术人员的已知技术。本发明省略了对公知组件和公知技术的描述,以避免赘述和不必要地限制本发明。上述实施例中所描述的实施方式也并不代表与本技术相一致的所有实施方式,在本发明技术方案的基础上,本领域技术人员不需要付出创造性的劳动即可做出的各种修改或变形仍在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1