低轨飞行器的北斗全球短报文出站卫星选择方法及系统与流程
1.本发明涉及航天器技术领域,特别是一种低轨飞行器的北斗全球短报文出站卫星选择方法及系统。
背景技术:
2.北斗三号系统可以为全球地表及以上1000km空间内的用户提供双向报文通信服务。低轨航天器可配备全球短报文通信终端,利用全球短报文通信服务进行境内外测控、数传。地面给低轨航天器发送报文时,主控站需要选择低轨航天器天线视场内的北斗卫星进行报文出站,因此需要掌握低轨飞行器的动态位置。对此,地面终端的做法是终端定期或者出现较大位置偏差时通过短报文入站汇报终端自己的位置,由于地面终端移动速度相对较慢,上报位置的频率不需要特别频繁。
3.然而,低轨航天器运行速度高达几千米每秒,十几秒内就能出现100公里以上的位置变化,如果采用和地面终端一样位置更新上报位置,每分钟就需要多次上报。北斗卫星短报文入站通道有限,当低轨用户增多时,频繁的位置更新将造成短报文入站通道“拥塞”,阻碍全球短报文服务在低轨飞行器上的应用。并且,北斗系统目前也没有利用飞行器轨道数据预测低轨飞行器位置的接口和处理方案。北斗系统如何掌握低轨飞行器的实时位置,是全球短报文出站卫星选择亟待解决的问题。
技术实现要素:
4.鉴于此,本发明提供一种低轨飞行器的北斗全球短报文出站卫星选择方法及系统,通过地面终端汇报低轨飞行器的实时位置,解决了北斗系统给低轨飞行器发送报文时的低轨飞行器实时位置掌握及出站卫星选择问题。
5.本发明公开了一种低轨飞行器的北斗全球短报文出站卫星选择系统,包括:低轨飞行器和地面系统;所述地面系统包括第一地面短报文终端、第二地面短报文终端和地面主控中心;
6.所述低轨飞行器用于通过全球短报文通信服务下传所述低轨高速飞行器的开普勒轨道六根数给所述地面系统;
7.所述地面系统中的地面主控中心用于根据接收到的所述开普勒轨道六根数,计算所述低轨飞行器的实时位置;
8.所述第二地面短报文终端用于通过全球短报文将所述低轨飞行器的实时位置传输至北斗系统;
9.所述第一地面短报文终端用于在所述北斗系统接收到所述低轨飞行器的实时位置后,将测控、数传信息通过所述北斗系统转发传输至所述低轨飞行器。
10.进一步地,所述低轨飞行器设置有定轨接收机、星务计算机和星载短报文终端;
11.所述定轨接收机用于利用gnss定位结果,完成所述低轨飞行器的开普勒轨道六根数的确定;
12.所述星务计算机用于产生用户有效报文信息并将其传输至所述星载短报文终端;
13.所述星载短报文终端用于接收用户有效报文信息,完成入站报文发射。
14.进一步地,所述星载短报文终端还用于接收所述北斗系统的出站报文,完成用户有效信息提取。
15.进一步地,所述第一地面短报文终端还用于和所述低轨飞行器进行双向通信,并将接收到的所述北斗系统下传的短报文与所述地面主控中心交互。
16.本发明还公开了一种基于上述所述的低轨飞行器的北斗全球短报文出站卫星选择系统的方法,所述方法包括:
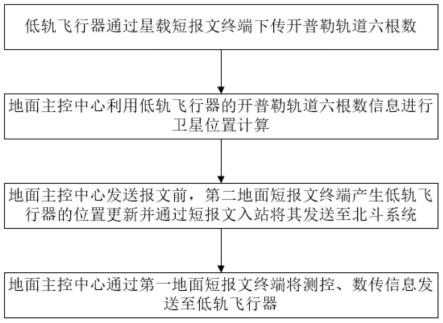
17.步骤1:低轨飞行器通过星载短报文终端下传开普勒轨道六根数;
18.步骤2:地面主控中心利用低轨飞行器的开普勒轨道六根数信息进行卫星位置计算;
19.步骤3:地面主控中心发送报文前,第二地面短报文终端产生低轨飞行器的位置更新并通过短报文入站将其发送至北斗系统;
20.步骤4:地面主控中心通过第一地面短报文终端将测控、数传信息发送至低轨飞行器。
21.进一步地,所述步骤1具体包括:
22.定轨接收机产生长半轴、偏心率、轨道倾角、升交点赤经、近地点幅角和真近点角六个轨道参数,并将六个所述轨道参数传递给星务计算机;低轨飞行器首次入轨或者轨道发生较大变化时,星务计算机将六个所述轨道参数编排成短报文,单条报文控制在560bit以内,通过低轨飞行器内的有线信道,触发星载短报文通信机发射含轨道信息的报文;
23.所述含轨道信息的报文通过短报文入站发送至北斗系统后,北斗系统转发所述含轨道信息的报文至第一地面短报文终端。
24.进一步地,所述步骤2具体包括:
25.第一地面短报文终端接收到低轨飞行器下传的开普勒轨道六根数后,将所述开普勒轨道六根数传递给地面主控中心,地面主控中心利用所述开普勒轨道六根数,采取通用的由开普勒轨道六根数计算卫星位置方法,实时计算低轨飞行器位置。
26.进一步地,所述步骤3具体包括:
27.北斗系统通过id信息实现对短报文终端的管理,每个短报文通信机都含有对应的id;第二地面短报文终端复制星载短报文通信终端的id信息;
28.当地面主控中心需要发送报文前,将主控中心维持的低轨飞行器实时位置发送给第二地面短报文终端;第二短报文终端再收到位置信息后,立即产生一条位置更新消息并通过短报文入站发送给北斗系统;北斗系统获取到该条位置更新后,则掌握了低轨飞行器的最新位置;实现位置更新从高频率的周期更新转换为按需更新。
29.进一步地,所述步骤4具体包括:
30.在完成步骤3后,地面主控中心通过第一短报文终端向低轨飞行器发送包含测控、数传信息的报文,北斗系统优先选择低轨飞行器视场内高仰角北斗卫星为出站卫星,低轨飞行器上的星载短报文终端通过接收所述出站卫星的信号,即可获取来自地面的测控、数传信息,并进一步的发送给星务计算机。
31.进一步地,地面主控中心通过第一短报文终端向低轨飞行器发送包含测控、数传
信息的报文,与步骤3中第二短报文终端通过短报文入站向北斗系统发送位置更新消息的时间差控制在10s以内。
32.由于采用了上述技术方案,本发明具有如下的优点:
33.(1)本发明通过地面终端汇报低轨飞行器的实时位置,解决了北斗系统给低轨飞行器发送报文时的低轨飞行器实时位置掌握及出站卫星选择问题;
34.(2)本发明无需对北斗系统进行改造即实现了对低轨飞行器的多用户扩展,实现北斗系统对低轨飞行器运行全球短报文终端支持。
附图说明
35.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
36.图1为本发明实施例的一种低轨飞行器的北斗全球短报文出站卫星选择系统的信息流框图示意图;
37.图2为本发明实施例的一种低轨飞行器的北斗全球短报文出站卫星选择方法的流程示意图。
具体实施方式
38.结合附图和实施例对本发明作进一步说明,显然,所描述的实施例仅是本发明实施例一部分实施例,而不是全部的实施例。本领域普通技术人员所获得的所有其他实施例,都应当属于本发明实施例保护的范围。
39.本发明提出一种高速航天器的北斗全球短报文出站卫星选择方法及系统,在无需频繁地进行位置更新情况下,解决短报文出站卫星选择问题。
40.本发明的目的是:
41.(1)通过全球短报文通信服务下传低轨高速飞行器的开普勒轨道六根数,在地面计算低轨飞行器的实时位置;
42.(2)地面主控中心发送报文前,通过全球短报文将低轨飞行器的实时位置汇报给北斗系统,解决北斗系统给低轨飞行器发送报文时低轨飞行器实时位置掌握及出站卫星选择问题。
43.实施例一:
44.参见图1,本发明提供了一种低轨飞行器的北斗全球短报文出站卫星选择系统的实施例。如图1所示,s1:包含开普勒轨道六根数的入站报文;s2:包含开普勒轨道六根数的出站报文;s3:低轨飞行器的位置更新;s4:地面发送给飞行器的测控、数传入站报文;s5:地面发送给飞行器的测控、数传出站报文;s6:开普勒轨道六根数原始信息;s7:封装后的包含开普勒轨道六根数的用户有效报文内容;s8:包含开普勒轨道六根数的用户有效报文内容;s9:包含数传、测控数据的报文用户有效报文内容;s10:包含低轨飞行器位置信息的用户有效报文内容。
45.该选择系统包括:低轨飞行器和地面系统;地面系统包括第一地面短报文终端、第二地面短报文终端和地面主控中心;
46.低轨飞行器用于通过全球短报文通信服务下传低轨高速飞行器的开普勒轨道六根数给地面系统;
47.地面系统中的地面主控中心用于根据接收到的开普勒轨道六根数,计算低轨飞行器的实时位置;
48.第二地面短报文终端用于通过全球短报文将低轨飞行器的实时位置传输至北斗系统;
49.第一地面短报文终端用于在北斗系统接收到低轨飞行器的实时位置后,将测控、数传信息通过北斗系统转发传输至低轨飞行器。
50.低轨飞行器设置有定轨接收机、星务计算机和星载短报文终端;
51.定轨接收机用于利用gnss定位结果,完成低轨飞行器的开普勒轨道六根数的确定;
52.星务计算机用于产生用户有效报文信息并将其传输至星载短报文终端;
53.星载短报文终端用于接收用户有效报文信息,完成入站报文发射。
54.星载短报文终端还用于接收北斗系统的出站报文,完成用户有效信息提取。
55.第一地面短报文终端还用于和低轨飞行器进行双向通信,并将接收到的北斗系统下传的短报文与地面主控中心交互。
56.实施例二:
57.参见图2,本发明还提供了一种低轨飞行器的北斗全球短报文出站卫星选择方法的实施例,选择方法包括:
58.步骤1:低轨飞行器通过星载短报文终端下传开普勒轨道六根数;
59.步骤2:地面主控中心利用低轨飞行器的开普勒轨道六根数信息进行卫星位置计算;
60.步骤3:地面主控中心发送报文前,第二地面短报文终端产生低轨飞行器的位置更新并通过短报文入站将其发送至北斗系统;
61.步骤4:地面主控中心通过第一地面短报文终端将测控、数传信息发送至低轨飞行器。
62.步骤1具体包括:
63.定轨接收机产生长半轴、偏心率、轨道倾角、升交点赤经、近地点幅角和真近点角六个轨道参数,并将六个轨道参数传递给星务计算机;低轨飞行器首次入轨或者轨道发生较大变化时,星务计算机将六个轨道参数编排成短报文,单条报文控制在560bit以内,通过低轨飞行器内的有线信道,触发星载短报文通信机发射含轨道信息的报文;
64.含轨道信息的报文发送至北斗系统后,北斗系统转发含轨道信息的报文至第一地面短报文终端。
65.步骤2具体包括:
66.第一地面短报文终端接收到低轨飞行器下传的开普勒轨道六根数后,将开普勒轨道六根数传递给地面主控中心,地面主控中心利用开普勒轨道六根数,采取通用的由开普勒轨道六根数计算卫星位置方法,实时计算低轨飞行器位置。
67.步骤3具体包括:
68.北斗系统通过id信息实现对短报文终端的管理,每个短报文通信机都含有对应的
id;第二地面短报文终端复制星载短报文通信终端的id信息;
69.当地面主控中心需要发送报文前,将主控中心维持的低轨飞行器实时位置发送给第二地面短报文终端;第二短报文终端再收到位置信息后,立即产生一条位置更新消息并通过短报文入站发送给北斗系统;北斗系统获取到该条位置更新后,则掌握了低轨飞行器的最新位置;实现位置更新从高频率的周期更新转换为按需更新。
70.步骤4具体包括:
71.在完成步骤3后,地面主控中心通过第一短报文终端向低轨飞行器发送包含测控、数传信息的报文,北斗系统优先选择低轨飞行器视场内高仰角北斗卫星为出站卫星,低轨飞行器上的星载短报文终端通过接收出站卫星的信号,即可获取来自地面的测控、数传信息,并进一步的发送给星务计算机。
72.地面主控中心通过第一短报文终端向低轨飞行器发送包含测控、数传信息的报文,与步骤3中第二短报文终端通过短报文入站向北斗系统发送位置更新消息的时间差控制在10s以内。
73.实施例三:
74.为了便于理解,本发明给出了一个更为具体的实施例:
75.步骤1:低轨飞行器通过星载短报文终端下传开普勒轨道六根数。某低轨飞行器上设计有gnss接收机、星载短报文终端和星务计算机及其它系统。gnss接收机、星载短报文终端通过can总线和星务计算机通信。gnss接收机接收b1、l1c/a信号完成定位及定轨,并将开普勒轨道六根数通过can总线上报给星务计算机,飞行器首次入轨或者轨道发生较大变化时,星务计算机将轨道数据封装成560bit的用户有效报文数据,通过can总线发送给星载短报文终端,星载短报文终端收到该条can消息后,立即将560bit有效数据封装成短报文信息帧,完成信号调制后将报文发送给北斗卫星,由此该报文进入北斗系统。
76.步骤2:地面主控中心利用低轨飞行器的轨道信息进行卫星位置预测。第一地面短报文终端收到低轨飞行器下传的轨道数据后,通过网线将该轨道数据传递给地面主控中心,地面主控中心利用开普勒轨道六根数,采取通用的由开普勒轨道六根数计算卫星位置方法,实时计算低轨飞行器位置。
77.步骤3:地面主控中心发送报文前,第二地面短报文终端产生低轨飞行器的位置更新。星载短报文终端的id信息通过软件模块控制,将同样信息的软件模块复制给第二地面短报文终端。当地面主控中心需要发送报文前,将主控中心通过网线将维持的低轨飞行器实时位置发送给第二地面短报文终端。第二地面短报文终端立即产生一条位置更新消息并通过短报文入站发送给北斗系统,北斗系统认为低轨飞行器自身上报了位置更新,按照处理地面终端一样的方式掌握了低轨飞行器的最新位置。
78.步骤4:地面主控中心通过第一地面短报文终端将测控、数传信息发送至低轨飞行器。在完成步骤3后,地面主控中心1秒后控制第一地面短报文终端发送包含测控、数传信息的报文。北斗系统优先选择低轨飞行器视场内高仰角北斗卫星为出站卫星,低轨飞行器上的星载短报文终端通过接收该出站卫星的信号,获取来自地面的测控、数传信息,通过can总线进一步的发送给星务计算机。
79.通过上述方法,无需高频、周期的进行位置更新,只需要发送短报文前更新一条位置更新即可,而地面发送给低轨飞行器的测控数传数据通常为低频应用,不会导致全球短
报文通道的拥塞。本方法在无需改造北斗系统的情况下,解决了北斗系统给低轨飞行器发送报文时低轨飞行器实时位置掌握及出站卫星选择问题。
80.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1