一种基于自适应前位置约束的定位方法
1.发明涉及一种定位方法,具体是一种基于自适应前位置约束的定位方法。
背景技术:
2.随着社会的快速发展,在高度城市化的现代社会,人们对空间位置信息的需求不断提高,定位技术也越来越受到人们的重视。尤其是近些年,基于卫星定位系统、移动互联网、智能手机等技术提供的位置信息服务,给人们日常生活带来极大的便利。在当前的定位技术的应用场景中,除了已成熟的室外定位场景,随着物联网的不断发展各种智能家具丰富着我们的生活,室内定位场景也逐渐受到广大用户的持续关注。例如,如安全问题、机场、大学或教育中心、库存管理、资产跟踪、大型博物馆的游客引导、医院中医务人员、病人或设备的位置检测、追踪消防队员在着火建筑物内的活动等,对室内环境下的定位信息需求就很迫切。
3.但由于在室内环境中,建筑物的遮挡与屏蔽,对卫星信号会造成很大的衰减效应,导致在室外定位环境中广泛应用的卫星定位系统在室内无法提供有效的服务。更无法提供足够精度的位置信息来满足人们在该环境下的定位需求。因此,亟待研究新的技术途径来对室内环境中的定位问题做深入、有效的研究。当前主要的运用wifi信号室内定位技术可以分为如下几类:
4.1、wi-fi指纹库定位:这种方式充分利用wi-fi信号无处不在的便利,预先构建无线信号指纹库。指纹库主要通过收集区域内wi-fi信号的标识信息和信号强度信息,结合采样点位置信息来产生。在使用中,再对定位设备收集的信号和指纹库数据进行指纹匹配,估算出设备位置。
5.2、wi-fi基站定位:wi-fi基站同时作为定位基站使用,wi-fi基站通过获取移动设备发射信号的信号强度,估算出设备的相对距离。当多个基站侦测到同个移动设备时,采用三边定位技术估算出设备的绝对位置。
6.3、wi-fi信号到达角度(aoa)技术:aoa技术在信号接收端使用特殊设计的天线阵列,利用无线波形的相差计算出信号到达角度。当多个基站一起使用时,通过三角定位的方式估算出设备位置。一般天线数量的多少会影响定位的精度和稳定性,因为wifi5和wifi6基站已经是多天线天线阵列,可以在不改变硬件成本的情况下,通过优化天线设计,即可让wi-fi接入基站同时能提供高精度定位服务。
7.4、wi-fi信号飞行时间(tof)技术:tof技术通过获取无线信号传播时间来估算无线基站和设备间的距离。该技术又叫fmt(fine time management)或rtt(round time trip)技术,是802.11mc wi-fi技术标准的一部分。随着wifi6的普及,wi-fi通讯频道的频宽可以达到160mhz,使得rtt技术的理论精度达到1米,多个tof基站即可提供厘米级或亚米级精度的定位。
技术实现要素:
8.本发明主要wknn定位算法加以创新、改进,提出自适应前位置约束的定位算法,使其可以根据计算的行人步长s,对行人下一位置进行约束,即行人当前位置与下一位置的距离不能大幅超越步长s,从而降低使用wifi信号进行定位时发生的跳动,使定位的精度提升。
9.发明的目的可以通过以下技术方案实现:
10.一种基于自适应前向位置约束的定位方法,所述定位方法包括如下步骤:
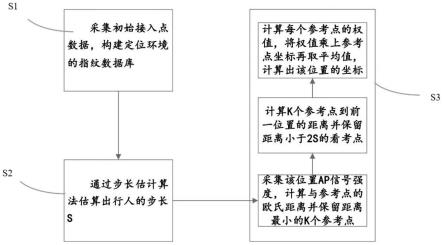
11.s1、采集初始接入点数据,构建定位环境的原始指纹数据库。
12.s2、计算行人步长s。
13.s3、根据s2中的行人步长s计算用户在室内的位置。
14.进一步的,所述s1具体为:
15.首先根据目标区域的空间,每隔一段距离设置多个参考点,并将多个参考点的位置记录在同一坐标系中,同时,在每个参考点处检测wifi信号,包括rss和mac地址信息;
16.原始指纹数据库中第i个参考点名称为rp_i,参考点坐标为(xi,yi),第i个参考点接收到的第k个接入点名称为ap_i_k,mac地址为mac_i_k,信号强度为rssi_i_k,其中,(k=1,2
…
,m)。
17.进一步的,所述s2具体为:
18.通过调用智能手机中的传感器模块来搜集检测到的加速度数据,其中包括3个方向的加速度简称三轴加速度(x,y,z),通过三轴加速度的幅值变化来检测行人行走的步数,通过式(1)融合的三轴加速度来做峰值的检测:
[0019][0020]
使用一个低通数字滤波器来移除高频噪声和铆点,低通滤波器给出了一个截止频率f
cut-off
为平滑因子,0≤a≤1,使用式(2)实现低通滤波器:
[0021]
yi=y
i-1
+a(x
i-y
i-1
)(2)
[0022]
通过平方运算来增强高频部分,进行集成运算,利用一个移动的集成滤波器将低通滤波器处理后的数据进行平滑处理,如式(3)所示:
[0023]
yi=(x
i-(n-1)
+x
i-(n-2)
+
···
+xi)/n(3)
[0024]
通过weiberg算法估计步长,模拟装置领域已经给出过关于加速度与步长关系,使用式(4)获取行人步长s:
[0025][0026]
式中,k是一种比例因子,通过实验测得,作为比例常量来衡量估计步长与真实距离的关系a
max
、a
min
是加速度数据中波峰与波谷对应的最大、最小加速度值。
[0027]
进一步的,所述s3具体为:
[0028]
通过手机检测各ap点的信号接收强度,如式(5)中所示
[0029]
[0030]
当前位置已被识别为第i分区时,则使用第i分区指纹数据库中的rss向量与a进行比较,以计算欧几里德距离,结果被组合成一组信号空间距离b,如式(6)所示
[0031]
b={d1,d1···dm
}(6)
[0032]
根据wknn算法需要将b中数据的前k个元素,组成新向量c,如式(7)所示
[0033]
c={d1,d2···dk
}(7)
[0034]
将集合c中的每个元素替换为其相应的参考点坐标,新向量d的形式,如式(8)所示
[0035]
d={(x1,y1)(x2,y2)
···
(xk,yk)}(8)
[0036]
计算(x
ik-1
,y
ik-1
)与d中参考点坐标的欧几里德距离,结果被组合成一组空间距离h,如式(9)所示
[0037]
h={d1,d2···dk
}(9)
[0038]
其中,(xr,yr)为行人的当前位置的坐标;
[0039]
根据式(4)计算出的行人步长s,将2倍的行人步长作为约束半径,将h中的d1,d2···dk
与2s做比较并保留小于2s的元素,将保留的n(n≤k)个元素替换为其相应参考点的位置坐标,新向量e的形式,如式(10)所示
[0040]
e={(x1,y1)(x2,y2)
···
(xn,yn)}(10)
[0041]
将e的元素替换为c中相应的信号空间距离,由最终参考点的欧几里德距离组成的向量f如(11)所示
[0042]
f={d1,d2···dn
}(11)
[0043]
然后,计算每个最终参考点的权重在f中使用元素的公式,如式(12)所示
[0044]
行人在下一位置坐标估计通过式(13)计算
[0045][0046]
发明的有益效果:
[0047]
本发明主要wknn定位算法加以创新、改进,提出自适应前位置约束的定位算法,使其可以根据计算的行人步长s,对行人下一位置进行约束,即行人当前位置与下一位置的距离不能大幅超越步长s,从而降低使用wi f i信号进行定位时发生的跳动,可以适应行人的各种行走姿势,不但可以定位的精度提升,且使得该算法更具有普适性。
附图说明
[0048]
下面结合附图对发明作进一步的说明。
[0049]
图1是本发明定位方法的流程图;
[0050]
图2是本发明前位置约束示意图;
[0051]
图3是本发明传感器模块采集数据示意图;
[0052]
图4是本发明三轴加速度矢量和信号结构示意图;
[0053]
图5是本发明低通滤波后信号示意图;
[0054]
图6是本发明波峰波谷信号示意图;
[0055]
图7是本发明wknn定位算法预测轨迹示意图;
[0056]
图8是本发明前一位置约束定位算法预测轨迹。
具体实施方式
[0057]
下面将结合发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是发明一部分实施例,而不是全部的实施例。基于发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于发明保护的范围。
[0058]
针对现有基于wknn定位技术在定位过程中会因为wifi信号的不稳定,而导致定位过程中出现位置跳变的问题,本发明基于前向定位算法融合测步长算法,将测得的步长作为前向定位过程中画圆的半径,从而可以适应各种运动状态。
[0059]
下面结合附图对本发明的应用原理作详尽的描述。
[0060]
如图1所示,本发明实施例提供的基于自适应前位置约束的定位算法具体包括以下步骤:
[0061]
s1:采集初始接入点数据,构建定位环境的指纹数据库
[0062]
首先根据目标区域的空间特征将其划分为不同的区域,使一个分区的内部尽可能没有遮挡物,以确保wifi信号的一致性;
[0063]
然后,每个分区通过提取该分区中参考点,共享的相同接入点信息来组装自己的指纹数据库;
[0064]
由于分区区域比整个目标区域小得多,这些参考点共享的接入点数量显著增加,因此每个对应区域的数据库可以提供更丰富的信息,随后,在wknn算法的基础上,提出了区域判别算法来提高预测精度,详细算法如下所示:
[0065]
根据目标区域的大小,每隔一段时间设置一定数量的参考点,并将其位置记录在同一坐标系中,同时,在每个参考点处检测wifi信号,包括rss(received signal strength)和mac(mediaaccess controladdress)地址信息,该地址信息构成原始指纹数据库,编号后,第i个区域原始指纹数据库如表1所示:
[0066]
表1
[0067][0068]
s2、计算行人步长s
[0069]
如图2所示,通过调用智能手机中的传感器模块来搜集检测到的加速度数据,其中包括3个方向的加速度简称三轴加速度(x,y,z),如图3所示,通过三轴加速度的幅值变化来
检测行人行走的步数,三轴加速度的矢量和信号如图4所示,由于手机在行人的手中会有不同的姿态,不能用单独的某一轴加速的值来检测,所以通过式(1)融合的三轴加速度来做峰值的检测:
[0070][0071]
由于手机上的随机抖动导致了一些高频噪声,使用一个低通数字滤波器来移除高频噪声和一些铆点,如图5所示,低通滤波器给出了一个截止频率f
cut-off
为平滑因子,0≤a≤1,使用式(2)实现低通滤波器:
[0072]
yi=y
i-1
+a(x
i-y
i-1
)(2)
[0073]
如图6所示,通过实验将截止频率设置为7hz,因此平滑因子为0.13,通过平方运算来增强高频部分,使得波峰更容易被检测出来。进行集成运算,利用一个移动的集成滤波器将低通滤波器处理后的数据进行平滑处理,如式(3)所示并将n取10
[0074]
yi=(x
i-(n-1)
+x
i-(n-2)
+
···
+xi)/n(3)
[0075]
通过weiberg算法估计步长,将每一步的向量分成x、y两个方向,其中x轴方向为东,y轴方向为北,模拟装置领域已经给出过关于加速度与步长关系,使用式(4)获取行人步长s,行人步长s为行人每步的步长。
[0076][0077]
式中,k是一种比例因子,由实验测得,a
max
、a
min
是加速度数据中波峰与波谷对应的最大、最小加速度值。该步长估计方式不仅可以实时地更新步长,而且不需要人为的输入,消除了由于人工操作造成的误差,实现了一种自适应步长估计方式。
[0078]
s3、根据s2中的行人步长s计算用户在室内的位置
[0079]
通过手机检测各ap点的信号接收强度,如式(5)中所示
[0080][0081]
使用表1所示的纹数据库中的rss向量与a进行比较,以计算欧几里德距离,结果被组合成一组信号空间距离b,如式(6)所示
[0082]
b={d1,d2···dm
}(6)
[0083]
根据wknn算法需要将b中数据的前k个元素,组成新向量c,如式(7)所示
[0084]
c={d1,d2···dk
}(7)
[0085]
将集合c中的每个元素替换为其相应的参考点坐标,新向量d的形式,如式(8)所示
[0086]
d={(x
*i,1
,y
*i,1
)(x
*i,2
,y
*i,2
)
···
(x
*i,k
,y
*i,k
)}(8)
[0087]
假设行人的前一个位置的坐标为(x
ik-1
,y
ik-1
),计算(x
ik-1
,y
ik-1
)与d中参考点坐标的欧几里德距离,结果被组合成一组空间距离h,如式(9)所示
[0088]
h={d1,d2···dk
}(9)
[0089]
根据式(4)计算出的行人步长s,本实施例中将2倍的行人步长作为约束半径,将h中的d1,d2···dk
与2s做比较并保留小于2s的元素,将保留的n(n≤k)个元素替换为其相
应参考点的位置坐标,新向量e的形式,如式(10)所示
[0090]
e={(x1,y1)(x2,y2)
···
(xn,yn)}(10)
[0091]
将e的元素替换为c中相应的信号空间距离,由最终参考点的欧几里德距离组成的向量f如(11)所示
[0092]
f={d1,d1···dn
}(11)
[0093]
然后,计算每个最终参考点的权重在f中使用元素的公式,如式(12)所示
[0094]
因此,行人在tk时的室内位置估计可以通过式(13)计算
[0095][0096]
wknn算法与自适应前位置约束定位算法,均方误差对比如表2所示:
[0097]
表2
[0098][0099]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0100]
以上显示和描述了发明的基本原理、主要特征和发明的优点。本行业的技术人员应该了解,发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明发明的原理,在不脱离发明精神和范围的前提下,发明还会有各种变化和改进,这些变化和改进都落入要求保护的发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1