一种实时的相控阵雷达组网系统的资源管理方法
networks tracking via cone programming[j].ieee sensors journal,2020,20(99):5092-5101.)中单独考虑了驻留时间有限的雷达网络,通过二阶锥规划求解优化问题自适应调整驻留时间分配以提高多目标综合跟踪性能,文献(dai j,yan j,wang p,et al.optimal resource allocation for multiple target tracking in phased array radar network[c].2019international conference on control,automation and information sciences(iccais),chengdu 2019:1-4.)针对分布式相控阵雷达网络系统中多目标跟踪的问题,提出了一种联合目标分配与资源优化方法,在保证较好的多目标跟踪精度同时降低雷达的能量消耗。
[0005]
上述的资源管理策略多以改善目标跟踪精度为目的,或同时优化目标跟踪精度和资源消耗量。而在实际的目标跟踪中,根据每个目标的重要程度,可为每个目标设定期望跟踪精度,在保证多目标期望跟踪精度的条件下,极小化系统的资源消耗量,而无需苛责目标的跟踪精度无限制地提高。在文献(sun w,yi w,xie m,et al.adaptive node and power simultaneous scheduling strategy for target tracking in distributed multiple radar systems[c].2017international conference on information fusion(fusion),xi'an,2017:1-6.)中针对分布式多雷达系统的目标跟踪问题,提出了一种自适应节点选择与功率控制方法,通过可行方向法优化调度节点和功率资源可以实现在给定的期望跟踪精度下,使总发射能量最小化。文献(wang x,yi w,kong l.joint beam selection and dwell time allocation for multi-target tracking in phased array radar system[j].journal of radars,2017.)提出了一种用于相控阵雷达系统中多目标跟踪的联合波束和驻留时间分配策略,在保证满足预定的期望跟踪精度条件下,通过优化驻留时间实现以更少的系统资源实现多目标跟踪。上述优化问题的整体求解过程通过松弛手段从而采用优化理论中的方法求解,运算复杂度较高,不具备实时性。
[0006]
针对上述问题,本发明提出一种实时的相控阵雷达组网系统的资源管理方法,该方法一方面利用启发式规则实现多雷达节点与多目标之间的匹配,另一方面采用黄金分割方法完成激活节点的辐射能量优化,在保证期望跟踪精度的条件下极小化了系统的总体资源消耗量。
技术实现要素:
[0007]
假设相控阵雷达组网系统对q个目标进行跟踪,目标集合为{1,2
…
q},在tk时刻每个目标的状态集合为其中t
k(q)
是目标q的最新更新时刻,是t
k(q)
时刻更新后的状态估计,pq(t
k(i)
)是目标q的估计误差协方差矩阵。雷达组网系统中包含有n部相控阵雷达,雷达集合为{1,2
…
n},第n个雷达的坐标为(xn,yn),其中xn、yn分别表示雷达n在x方向和y方向的坐标。各个目标的期望跟踪精度为q=1,2
…
q,雷达n的最大发射能量和最小发射能量分别为e
n,max
、e
n,min
。一种实时的相控阵雷达组网系统的资源管理方法的具体步骤如下:
[0008]
步骤1.初始化目标-雷达匹配关系矩阵u(t
k+1
)、雷达能量资源分配矩阵e(t
k+1
)为q行n列的全零矩阵。
[0009]
步骤2.计算目标集合中的目标在未分配任何雷达发射能量资源情况下的bfim(bayes fisher information matrix):
[0010][0011]
其中f表示状态转移矩阵,q为过程噪声协方差矩阵,jq(tk)表示目标q目前已获得的bfim。其中利用公式
[0012][0013]
得到各个目标的预测跟踪精度,其中trace(
·
)表示取迹操作,λ是跟踪精度提取矩阵,满足
[0014][0015]
步骤3.对于所有的目标判断是否满足如果满足,则将其从目标集合中删除,对于不满足的目标,计算当前时刻各目标预测跟踪精度与自身期望跟踪精度之间的误差绝对值找到其中跟踪精度误差绝对值最大值对应的目标q
*
,如步骤4所示,对目标q
*
分配雷达资源。
[0016]
步骤4.首先计算目标q
*
与雷达集合中的各个雷达的距离
[0017][0018]
其中xn、yn分别表示雷达n在x方向和y方向上的坐标,分别表示t
k+1
时刻目标q
*
在x方向和y方向上的坐标。将目标q
*
与各个雷达之间的距离进行排序,再将雷达集合中距离目标q
*
最近的雷达n
*
分配给目标q
*
。此时,将目标集合中的目标q
*
删除。
[0019]
步骤5.得到上述一组匹配关系后,计算当前匹配关系下的雷达所需能量。
[0020]
步骤5.1:首先,计算采用最大发射能量照射目标时的跟踪精度值:
[0021][0022]
其中的表达式如下:
[0023][0024]
式中,g
t,n
表示雷达的发射增益,g
r,n
表示雷达的接收增益,ζn表示雷达信号的波长,α
q,n
(t
k+1/k
)为目标q相对于雷达n的rcs,k表示玻尔兹曼常数,k=1.38
×
10-23
,tn为噪声温度,fn为噪声系数,ln为损耗系数,r
q,n
(t
k+1/k
)表示目标q相对于雷达n之间的预测距离,c1=1.57,c2=1.81均为常数,δrn表示雷达的距离分辨率。bn表示雷达n的波束宽度,满足bn=1.76/mn,mn为相控阵雷达n的阵元数,表示线性化的量测转移矩阵,在量测函
数满足公式时计算为:
[0025][0026]
式中分别表示目标状态一步预测在雷达n的笛卡尔坐标系下的x坐标、y坐标。
[0027]
将采用最大发射能量照射目标时的跟踪精度与期望跟踪精度比较,如果则转入步骤5.2。否则直接输出最大发射能量作为此时的雷达的辐射能量。
[0028]
步骤5.2:首先令区间终止长度为δe,在[a1,b1]插入分割点:
[0029]
λ1=a1+0.382(b
1-a1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0030]
μ1=a1+0.618(b
1-a1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0031]
计算每个分割点处的预测跟踪精度
[0032][0033][0034]
计算每个分割点处的预测跟踪精度与期望跟踪精度差值的绝对值,得到对应分割点处函数值:
[0035][0036][0037]
令k=1;
[0038]
步骤5.3:若b
k-ak≤δe,则停止计算,输出bk为最佳发射能量。否则,若f(λk)>f(μk),转步骤5.4,若f(λk)≤f(μk),转步骤5.5。
[0039]
步骤5.4:令a
k+1
=λk,b
k+1
=bk,λ
k+1
=μk,μ
k+1
=a
k+1
+0.618(b
k+1-a
k+1
),计算函数值f(μ
k+1
),转步骤5.6。
[0040]
步骤5.5:令a
k+1
=ak,b
k+1
=μk,μ
k+1
=λk,λ
k+1
=a
k+1
+0.382(b
k+1-a
k+1
),计算函数值f(λ
k+1
),转步骤5.6。
[0041]
步骤5.6:令k=k+1,返回步骤5.3。
[0042]
步骤6.更新匹配关系矩阵u(t
k+1
),令其第q
*
行第n
*
列为1。更新雷达能量资源分配
矩阵e(t
k+1
),令其第q
*
行第n
*
列为步骤5中计算得到的能量值。此时,将雷达集合中的雷达n
*
删除,并查看目标集合和雷达集合是否为空,不为空的话,返回步骤2直到雷达集合为空或目标集合为空。
[0043]
步骤7.输出当前时刻最佳匹配关系矩阵和辐射能量矩阵作为当前时刻的优化结果。
[0044]
发明原理
[0045]
假设一个由n部相控阵雷达构建的组网系统实现对q个目标的跟踪。在跟踪过程中,通过对雷达与目标匹配关系以及雷达发射能量的自适应调整,在保证各个目标期望跟踪精度的条件下,极小化系统资源消耗量。
[0046]
首先,定义一个用来表示t
k+1
时刻相控阵雷达与目标之间的照射关系的目标雷达匹配关系矩阵:
[0047][0048]
式中,u
q,n
(t
k+1
)为一个0-1变量,为第n部相控阵雷达照射目标q的情况,表示:
[0049][0050]
由于每部雷达的波束在同一个跟踪间隔只能照射一个目标,因此u(t
k+1
)中元素需要满足约束:
[0051][0052]
另外,与目标-雷达匹配关系矩阵对应,定义一个用来表示t
k+1
时刻相控阵雷达发射能量的雷达资源分配矩阵:
[0053][0054]
式中,e
q,n
(t
k+1
)为一个连续变量,表示第n部相控阵雷达照射目标q的辐射能量,显然:
[0055]eq,n
(t
k+1
)≥0,q=1,
…
,q,n=1,
…
,n
ꢀꢀꢀꢀꢀ
(18)
[0056]
同时,相控阵雷达n针对目标q的发射能量e
q,n
满足:
[0057][0058]
当前匹配关系和发射能量的条件下,为满足跟踪精度要求,各个目标的跟踪精度
需要满足其期望跟踪精度:
[0059][0060]
基于此,使用尽量少的系统发射能量保证目标跟踪精度满足期望值的问题可以表示为如下一个优化问题模型:(说明为了描述的方便,以下表述中忽略了时标)
[0061][0062]
对上述优化问题进行求解,为了各目标能满足跟踪精度要求,需要确定依次对哪个目标匹配雷达资源,因此,首先计算所有目标在未分配任何雷达发射能量资源情况下的跟踪精度,并判断未分配资源时是否能满足目标期望跟踪精度。由于跟踪性能随着资源消耗的增加而提高,因此应当首先为未满足期望跟踪精度的目标分配相应的雷达资源,已经满足期望跟踪精度的目标不需要进行更新,将其从目标集合中删除。对于未满足跟踪精度的目标,将其预测跟踪精度与期望跟踪精度差值绝对值进行排序,选择差值最大者,优先为其匹配相应的雷达进行跟踪,如步骤1-3所示。
[0063]
由于在同样的雷达辐射能量条件下,目标的量测信噪比主要和目标与相控阵雷达之间距离的4次方呈反比,因此为目标分配一个近距离的雷达,能够尽量减少雷达辐射能量的消耗。当确定优先分配雷达的目标后,按(4)式计算该目标与雷达集合中的各个空置雷达之间的距离,选择最近的雷达分配给当前目标,如步骤4所示。
[0064]
得到当前一组匹配关系后,需要计算该匹配关系中雷达的辐射能量。在该匹配关系下,对目标进行跟踪时的量测过程对应的零均值量测噪声v
q,n
协方差满足:
[0065][0066]
其中和分别满足:
[0067][0068][0069]
式中snr
q,n
(t
k+1
)表示对应量测的信噪比:
[0070]
[0071]
可见,雷达的发射能量资源主要通过影响量测信噪比来影响量测误差协方差下界,进而影响目标的量测fim。因此,能量的大小与目标的预测跟踪精度相关联。为了节省相应的能量资源,最佳的辐射能量应该使得实际跟踪精度刚好等于期望跟踪精度。一方面辐射能量不够,没办法满足期望跟踪精度要求,另一方面辐射能量过多,使得实际跟踪精度低于期望跟踪精度,会造成资源的浪费。因此,构建一个以分配能量为自变量,实际跟踪精度与期望跟踪精度偏差的绝对值为函数值的映射关系。最优辐射能量就是使得该函数取值为0的能量值。
[0072]
首先,利用(5)式计算该匹配关系下采用最大的发射能量是否能够满足期望跟踪精度,
[0073]
如果可以满足,则需要确定最佳的辐射能量值。由于上述函数关系呈现的是单峰形式,可以采用黄金分割法计算得到刚好满足期望跟踪精度时的最佳辐射能量。当一部雷达耗尽所有的资源量,即选用最大发射能量也不能满足目标的期望跟踪精度时,为了达到较好的跟踪精度值,则直接输出最大能量作为此刻雷达的辐射能量。
[0074]
基于匹配关系和雷达发射能量,更新匹配关系矩阵u(t
k+1
)和雷达能量资源分配矩阵e(t
k+1
),进一步更新此目标的跟踪精度。继续遍历目标集合中的其余目标以及雷达集合中的其余雷达,重复上述过程,直到雷达集合或目标集合为空,即可得到该步跟踪下的雷达和目标的匹配关系及雷达辐射能量作为优化结果,如步骤6所示。
附图说明
[0075]
图1.跟踪场景图
[0076]
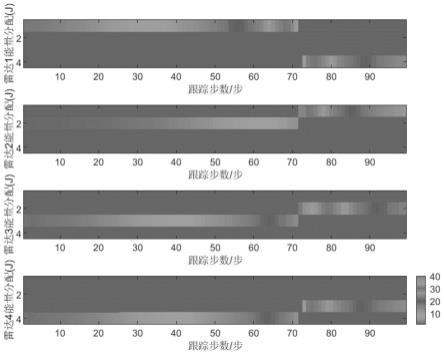
图2.匹配关系及能量优化图
[0077]
图3.目标实际跟踪精度和期望跟踪精度的对比图
[0078]
图4.本算法与固定匹配关系算法能量对比图
2具体实施方式
[0079]
假设在一个二维目标跟踪场景中,存在一个分布式相控阵雷达网络,其中包含4部位置不同的相控阵雷达,每部雷达能够获得的目标量测信息为目标的距离、方位角,雷达的参数如表1所示。利用该雷达组网系统对区域内的4个点目标进行跟踪,雷达的位置分布以及目标的初始状态信息如表2所示,设定4个目标的跟踪精度要求为
[0080]
表1分布式相控阵雷达网络认知多目标跟踪雷达参数设置
[0081][0082][0083]
表2分布式相控阵雷达网络认知多目标跟踪仿真场景设置
[0084]
雷达序号位置目标序号初始状态110km,10km130km,0m/s,20km,400m/s220km,90km220km,400m/s,70km,0m/s390km,90km370km,0m/s,80km,-400m/s490km,10km480km,-400m/s,30km,0m/s
[0085]
如图2所示,该算法可以在满足跟踪精度要求前提下,随着跟踪状态的变化,自适应的选择能量值。同时,随着雷达与目标之间的距离变化,雷达与目标之间的匹配关系也在自适应的变化,当目标运动到更近的雷达时,会切换到更近的雷达用于跟踪。
[0086]
如图3所示,本算法在每一个跟踪帧当中的跟踪精度可以维持在期望跟踪精度附近,仅在匹配关系切换过程中有所波动,之后跟踪精度又回到期望值附近,表明本算法可以满足跟踪精度要求,即保证约束条件
[0087]
为了验证本算法的优势,如图4所示,将本算法与固定匹配关系的算法进行对比,固定关系为:雷达1跟踪目标2,雷达2跟踪目标3,雷达3跟踪目标4,雷达4跟踪目标1。可见固定匹配关系下,各雷达所耗费能量在跟踪过程中始终采用了最大值,远远高于本算法的能量消耗。
[0088]
算法运行平台处理器为(intel(r)core(tm)i5-6300hq cpu@2.30ghz 2.30ghz),运行软件为matlab 2020a,进行100次蒙特卡洛仿真,平均运行时间为1.2173ms,可以满足实时性的要求。
[0089]
综上,本发明所提算法一种实时的相控阵雷达组网系统的资源管理方法,能够根据目标情况,实时的调整雷达与目标之间的匹配关系,并且在满足跟踪精度要求的前提下,实现雷达发射能量的自适应选择,达到节省系统资源的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1