基于uwb测距校准的高速运动物体定位方法
1.本发明涉及uwb动态定位的技术领域,具体涉及高速运动物体的定位方法。
背景技术:
2.基于超宽带无线通信技术的定位方法,其特点是通过uwb无线信号来获取时间戳,进而计算出设备之间(即基站和运动物体)的距离数据,最后根据距离信息构建定位模型来对物体进行定位。
3.现有的定位方法直接将采集到的距离数据应用到定位模型中,没有考虑该数据是否准确,但在实际情况下,由于基站的硬件条件无法完全一致,如果所测量运动物体和基站之间的距离不准确,就可能导致定位结果未必刚好相交于一点,由此定位模型计算出来的坐标值便会存在一定的偏差,因此需要通过一定的算法来估计一个相对理想的位置,使得与距离数据有关的误差最小化。
4.对于处于高速运动状态下的物体,在同一位置停留的时间较短,有可能会造成基站与tag还没有完整的完成一次信息交换(一般为10ms的时间),运动物体的位置会发生变化,假如对运动速度为60~120km/h的物体进行动态定位,在完成一次信息交换10ms内会发生16~30cm左右的位移,传统的基于uwb技术的定位解算模型没有考虑物体运动的速度过高时对定位精度的影响,产生了较大的定位误差,因此无法实现快速而精确的定位。
技术实现要素:
5.本发明针对上述技术的缺陷,提出一种基于uwb测距校准的高速运动物体的定位方法,主要解决uwb定位系统中距离数据误差较大以及对于高速运动状态下的物体无法实现精确定位的问题。
6.本发明解决问题所采用的技术方案如下:
7.一种基于uwb测距校准的高速运动物体的定位方法,其中,所述步骤包括:初始化步骤,基于uwb脉冲信号计算运动物体和基站的距离,根据椭圆上一点到焦点的距离之和为常数,构建椭圆定位模型来对物体进行定位,得到物体的初始位置t0(x0,y0,z0);校准步骤,测量运动物体和基站之间的距离数据总是包含误差,提出一种测距校准算法使误差最小化,构建基于距离误差的代价函数j来筛选距离误差较大的值,结合加速度梯度下降方法(nag)对j中的变量进行更新,直到误差最小停止迭代得到tk(xk,yk,zk);计算步骤,求解物体处于高速运动的状态下的定位坐标,先引入运动物体的速度参量(v
x
,vy,vz),构造各基站观测到的运动物体的位置t
ai
(xi,yi,zi)与速度v有关的关系式,建立关于基站和运动物体的向量方程,到运动物体的定位解算模型;优化步骤,将解算模型函数fi在tk处进行一阶泰勒展开,利用最小二乘法对运动物体的位置进行迭代估计,最后设置迭代终止条件输出当前时刻运动物体的位置。
8.所述初始化步骤包括采集两个基站和运动物体的距离信息,根据椭圆上一点到焦
点的距离之和为常数,采用椭圆定位列出非线性方程组,得到物体的初始位置t0(x0,y0,z0),
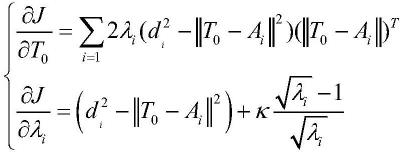
9.所述的基于uwb测距校准的高速运动物体的定位方法,其中,所述测距校准步骤具体包括:步骤1、构造基于误差函数的代价函数j,其中||t
0-ai||表示已知t0的空间坐标,计算出的与基站之间的距离;λi表示基站所占的比重,μ表示权重系数,用来平衡误差较大的距离;步骤2、以j作为约束条件,求j对λ
i-γv
t-1
和t
0-γv
t-1
处的一阶偏导,步骤3、使用nag结合动量项来对j中的变量进行更新,实现对误差较大距离的筛选,
10.采用nag方法将学习率设置为一个非常小的正数,保证迭代之后的值在位于迭代之前的邻域内减少,设置合适的迭代终止条件,直到误差最小停止迭代得到tk(xk,yk,zk),通过校准uwb基站和运动物体之间的距离,实现了定位运动物体坐标的优化。
11.所述的基于uwb测距校准的高速运动物体的定位方法,其中,所述的计算步骤包括,前提假设运动物体在与各基站完成一次完整的通信期间做速度为v的匀速直线运动,在求解定位坐标的同时引入物体的速度参量,表示速度分量和速度的关系,同时构造各时刻运动物体的位置t
ai
(xi,yi,zi)与速度v有关的关系式,xi=x+v
x
(t
i-t1),yi=y+vy(t
i-t1),zi=z+vz(t
i-t1)。
12.接下来构建关于基站、运动物体以及初始位置向量方程,得到与运动物体速度有关的定位解算模型用表示引入速度参量后基站和物体的距离,用是经过距离误差筛选后得到的物体初始位置tk与基站之间的距离。
13.所述的基于uwb测距校准的高速运动物体的定位方法,其中,所述的优化步骤包
括,联立运动物体的速度参量,将解算模型函数fi在tk(xk,yk,zk)作处进行一阶泰勒展开:fi(xi,yi,zi)-fi(xk,yk,zk)=fi′
(xk)(x
i-xk)+fi′
(yk)(y
i-yk)+fi′
(zk)(z
i-zk),利用最小二乘法求得最优解ψ=(h
t
h)-1ht
d,其中ψ=[x-x
k y-y
k z-z
k v
x v
y vz]
t
。
[0014]
之后将优化计算得到的定位坐标为下一次迭代的初始值,实时更新坐标值[x
k y
k zk]j=[xk+δx yk+δy zk+δz],设置迭代终止条件,对迭代结果进行约束,进而得到当前时刻运动物体的位置。
[0015]
本发明的技术效果在于:提出的一种基于uwb测距校准的高速运动物体的定位方法,主要包括解决uwb定位系统中距离数据误差较大以及对于高速运动状态下的物体无法实现精确定位的问题。
附图说明
[0016]
图1是本发明的基于uwb测距校准的高速运动物体定位方法的总体流程图。
[0017]
图2是将高速运动物体在t1~t4时间段的运动等效为匀速直线运动的示意图。
具体实施方式
[0018]
为了更清楚地解释本发明的目的与优点,下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅用于解释本发明,而非是对本发明的限定。
[0019]
如图1所示,图1是本发明的基于uwb测距校准的高速运动物体定位方法的总体流程图,所述的定位方法包括以下步骤:
[0020]
步骤s100、初始化步骤,基于uwb脉冲信号计算运动物体和基站的距离,构建椭圆定位模型得到物体的初始位置。
[0021]
较佳的,所述步骤s100具体包括:
[0022]
步骤s101、已知四个基站固定位置ai(xi,yi,zi),定位物体是速度为v的高速运动物体,假设在初始时刻t0,物体是静止的,首先采集两个基站和运动物体的距离信息,根据椭圆上一点到焦点的距离之和为常数,采用椭圆定位列出非线性方程组;其中di=c
×
t,c=3.0
×
108m/s,di=2a表示运动物体和基站i的距离,在椭圆中表示长半轴2a,两个基站分别表示一个椭圆的焦点,|a2ai|=2c则表示椭圆的焦距2c,根据椭圆的关系方程式:c2=a2+b2可以得到椭圆的短半轴b,已知椭圆这三个参数后,可构造满足运动物体位置坐标的椭圆方程。
[0023]
步骤s102、将椭圆定位模型联立的方程组进行线性化处理,用第i+1个式子减去第i个式子来消除多余的变量:
[0024]
步骤s103、进一步经过平方项处理与移项,将非线性方程组转化成线性方程组:对此方程组进行求解,即可得到物体的初始位置t0(x0,y0,z0);
[0025]
由步骤s102~s103已知,物体的初始位置坐标与两个因素有关,其一是基站的位置坐标ai(xi,yi,zi),其二则是所测量的基站与物体的距离信息di,而基站的坐标固定已知,则假如基站测量的距离误差较大时,就会对定位造成较大的干扰,使得测距不准确。
[0026]
步骤s200、校准步骤,结合上述问题提出一种测距校准算法使误差最小化,首先构建基于距离误差的代价函数j,对每个距离误差设置一定的权重,来筛选距离误差较大的值。其中表示已知t0的空间坐标,计算出的与基站之间的距离;λi是基站所测得距离的占比重,取值在[0,1]的范围内,κ表示筛选出来各个基站中所测距离误差较大的基站,μ是权重系数,用来平衡误差较大的距离。
[0027]
步骤s300、以计算的物体的初始坐标t0(x0,y0,z0)为迭代初始值,结合加速度梯度下降方法(nag)对j中的变量进行更新,直到误差最小停止迭代得到tk(xk,yk,zk)。
[0028]
较佳的,步骤s300具体包括:
[0029]
步骤s301、初始化设置,i=1表示基站数量,v
t
表示第t时刻nag寻优的速率,t=1,v0=0,λi的初值为1,k=0表示迭代次数,k
th
表示迭代上限,γ=0.9表示动量项大小,η=0.001表示迭代的步长;
[0030]
步骤s302、使用nag结合动量项来对j中的变量进行更新,以j作为约束条件,通过计算t
0-γv
t-1
和λ
i-γv
t-1
来预知参数在未来位置的近似值,之后求代价函数j在这个近似值处的梯度:若i≤4,则返回步骤s302;
[0031]
步骤s303、接下来利用上一时刻的动量项进行矢量相加,得到当前时刻的动量v
t
,
结合动量项来更新梯度相当于对函数进行了两次参数的更新,提高了寻优的速度同时减少寻优过程中频繁的波动:
[0032]
步骤s304、迭代次数k+1,t+1,利用动量参数更新变量λi和t0,保证迭代之后的值在位于迭代之前的邻域内减少:tk→
t
k+1
,λ
i(k)
→
λ
i(k+1)
,
[0033]
步骤s305、考虑假如出现λ
i(k+1)
<0的情况,则将η缩小,满足λi∈[0,1]的范围内,再返回步骤s303进行计算;
[0034]
步骤s306、设置迭代终止条件,当满足|j
k+1-jk|<ε=10-3
或k>k
th
时,迭代停止,通过校准uwb基站和运动物体之间的距离,实现了定位运动物体坐标的优化,输出定位标签的坐标tk(xk,yk,zk)。
[0035]
步骤s400、计算步骤,求解物体处于高速运动的状态下的定位坐标,先引入运动物体的速度参量(v
x
,vy,vz),构造各时刻运动物体的位置t
ai
(xi,yi,zi)与速度v有关的关系式,建立关于基站和运动物体的向量方程,得到运动物体的定位解算模型。
[0036]
较佳的,步骤s400具体包括:
[0037]
步骤s401、考虑处于高速运动状态的物体会在同一位置停留的时间较短,假设运动物体在与各基站完成一次完整的通信期间做速度为v的匀速直线运动,如图2所示,t1~t4表示完成一次完整的通信,将这一时间段内高速运动物体在的运动等效为匀速直线运动,其中表示速度分量和速度的关系;
[0038]
步骤s402、在求解定位坐标的同时引入物体的速度参数,首先构造各时刻运动物体的位置t
ai
(xi,yi,zi)与速度v有关的关系式:xi=x+v
x
(t
i-t1),yi=y+vy(t
i-t1),zi=z+vz(t
i-t1);
[0039]
步骤s403、如图2所示,构建关于基站、运动物体以及初始位置向量方程,得到与运动物体速度有关的定位解算模型表示引入速度参量后基站和物体的距离,是经过距离误差筛选后得到的物体初始位置tk与基站之间的距离。
[0040]
步骤s500、优化步骤,将解算模型函数fi在tk处进行一阶泰勒展开,利用最小二乘法对运动物体的位置进行迭代估计,最后设置迭代终止条件求得运动物体的最优解。
[0041]
较佳的,步骤s500具体包括:
[0042]
步骤s501、联立运动物体的速度参量,将tk(xk,yk,zk)作为初始值,对其进行迭代处理实现高精度的定位,首先在解算模型函数fi在tk处进行一阶泰勒级数展开:fi(xi,yi,zi)-fi(xk,yk,zk)=fi′
(xk)(x
i-xk)+fi′
(yk)(y
i-yk)+fi′
(zk)(z
i-zk),其中
[0043]
步骤s502、由fi一阶泰勒展开式来构造矩阵方程hψ=d,其中一阶泰勒展开式来构造矩阵方程hψ=d,其中ψ=[x-x
k y-y
k z-z
k v
x v
y vz]
t
利用最小二乘法求得最优解ψ=(h
t
h)-1ht
d;
[0044]
步骤s503、记[x-x
k y-y
k z-zk]=[δx δy δz],j=1表示迭代一次后得到的值,再以[x
k y
k zk]j=[xk+δx yk+δy zk+δz]来实时更新坐标值,用迭代后得到的值作为下一次迭代的初始值,最后设置迭代终止条件,当[x
i y
i zi]
min
≤[x
k y
k zk]j≤[x
i y
i zi]
max
且|δx|+|δy|+|δz|≤ξ(ξ表示合适的阈值)时迭代中止,进而得到当前时刻移动目标的位置。
[0045]
本发明实施例中提出了一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序执行上述各实施例所的提供的方法。
[0046]
应该理解的是,本发明的技术方案不限制于上述举例,本领域的普通技术人员可以对本发明进行改进或者等同替换,不脱离本发明的改建或变换均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1