一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法
1.本发明属于水下目标方向估计领域,具体涉及一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法。
背景技术:
2.波达方向(doa)估计是对水声目标进行识别、定位、跟踪和监等研究的前提和基础,是阵列信号处理的重要研究内容之一。它主要目的从噪声和干扰背景中获取感兴趣目标的方位信息。均匀线阵(ula)由于其规则的结构和成熟的技术,是doa估计中最常用的阵列几何。
3.现如今有很多种波达方位估计的方法,最具有代表性的是conventional beamforming(cbf)方法,其优势在于算法稳健性高,对阵列偏差非常鲁棒,并且在估计单目标方位时可以获得很高的精度。该方法简单,易于实现,因此常被用于实际情况中的目标doa估计。然而cbf方法旁瓣较高,对噪声抑制能力有限,另外,当阵元个数较少时该方法方位分辨率较低,不适合分辨空间角度间隔较小的两个目标方位。与cbf相比,mvdr(minimum variance distortionless response)具有更好的空间分辨力与未知强干扰抑制能力,但是mvdr这一类自适应波束形成器的方位估计精度经常会受到阵元幅度相位偏差、阵元位置偏差等各类偏差因素的影响,其稳健性不如cbf。高分辨的目标方位估计有很多种方法,其中子空间类算法是最常见一种,例如多重信号分类方法(music)。该方法拥有比cbf和mvdr更好的分辨力,但是如果信号个数不明确或者目标信号之间相关性强也会对信号和噪声子空间产生严重破坏,从而进一步降低子空间类方法的分辨力和估计精度。另外,music方法是基于特征分解的高分辨阵列处理技术,很小的阵元偏差可能会使这类方法的估计性能急剧下降。
4.实际情况中,海面上可能会存在多个干扰目标,使用分辨力低的cbf方法则无法准确地估计感兴趣目标的目标,尤其是当阵列尺寸较小时。这种情况下需要使用高分辨doa估计算法。然而,阵列偏差会影响大多数高分辨算法性能,使高分辨算法无法发挥其高分辨能力,甚至无法有效估计目标方位。其主要原因是多数高分辨算法都假设阵列流行向量是精确已知的,但是实际中往往存在各种误差,例如阵元幅度相位误差、阵列位置扰动、阵元之间互相耦合等。为了解决这个问题,学者们提出了很多阵列误差校正方法。阵列误差校正分为两大类,第一类是自校正算法,第二类是有源校正算法。
5.自校正算法即是将校正源方位看作未知参数,构造优化函数将阵列误差和信源方位进行联合优化求解,同时得到信源方位和阵列误差。在阵列幅度相位未知的情况下准确估计目标方位,该方法不限制阵列形状。然而,这种方法只有在阵列扰动不严重时才能很好地工作。由于高分辨压缩感知doa估计方法(cs-doa)的性能严重受到阵列幅度相位误差的影响,在均匀直线阵的基础上提出了一种鲁棒的cs-doa方法,在估计doa的同时,可以找到具有误差的阵元,但是该方法不能估计具体的幅度相位误差数值。
6.有源校正算法即是通过在空间中人为放置方位已知的校正源对阵列误差进行离线估计。基于子空间正交理论,通过对误差建模将阵列校正问题转换成误差参数估计问题,并利用lagrange乘子法得到估计误差的最优解。该方法需要一个已知方位的校正源,更适用于实际阵列安装应用前对阵列进行校正。研究了均匀圆阵的阵列误差校正方法,该方法不仅考虑了阵列互耦误差、幅度相位误差,其优势在于还考虑了阵列方向图误差。当环境信噪比降低时,阵列方向图与预设方向图存在偏差。该方法可以校正上述误差,改善doa估计性能。
技术实现要素:
7.本发明提供一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,该方法用以估计阵列的幅度相位误差,校正该误差从而提高方位估计性能。
8.本发明通过以下技术方案实现:
9.一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,所述校准方法具体包括以下步骤:
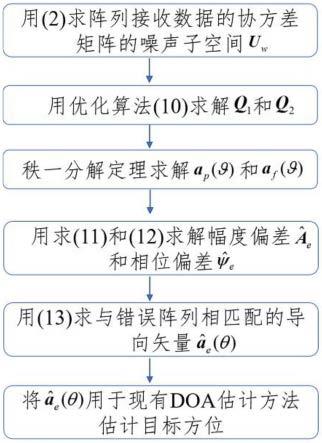
10.步骤1:对采集的水声目标的阵元信号进行特征值分解;
11.步骤2:利用步骤1采集的阵元信号,求解每个阵元的幅度偏差和相位偏差;
12.步骤3:利用步骤2求解出的幅度偏差和相位偏差,获得与未校准阵列相匹配的校准导向矢量;
13.步骤4:利用步骤3的校准导向矢量进行doa估计。
14.一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,所述步骤1采集的水声目标的阵元信号具体为,假设一个远场平面波入射到一个m个阵元的任意形状的阵列,平面波入射方向θ是信号方向与y轴方向的夹角;其中第m个阵元的位置表示为(xm,ym);
15.如果空间中有k个窄带信号,第k个信号表示为sk(t);阵列接收数据表示为:
[0016][0017]
表示k个目标的阵列流行向量,s(t)和n(t)是接收信号和噪声矩阵,s(t)=[s1(t),...,sk(t)]
t
,n(t)=[n1(t),...,nm(t)]
t
。
[0018]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,假设阵列采集到的噪声是满足时空不相关性的零均值高斯白噪声,并且k个信号之间互不相关,那么x(t)的协方差矩阵r
x
=e[x(t)xh(t)]表示为r
x
=rs+rn,其中,其中是的协方差矩阵;
[0019]
将r
x
进行特征值分解,得到:
[0020][0021]
其中us和表示信号子空间;uw表示噪声子空间。
[0022]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,所述步骤2求解每个阵元的幅度偏差和相位偏差具体包括以下步骤:
[0023]
步骤2.1:设计用于求解幅度偏差和相位偏差的优化算法;
[0024]
步骤2.2:利用凸优化方法求解基于步骤1的优化算法,并结合秩一分解定理求解
幅度偏差和相位偏差。
[0025]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,所述步骤2.1的优化算法具体为,没有偏差的导向矢量为a(θ)=[μ1,
…
,μm],其中κ=2π/λ;
[0026]
假设m个阵元的幅度偏差为ae=[a1,
…
,am],相位偏差表示为ψe=[η1,
…
,ηm],其中那么第m个阵元的导向矢量偏差为
[0027]
假设阵列校准时单目标的方位为φ,如果只考虑相位偏差,那么未校准的导向矢量表示为:
[0028][0029]
其中中的
“”
表示哈达玛乘积,也就是两个向量对应元素相乘,那么利用a
p
(φ)获取准确的估计方位,即
[0030][0031]
表示获得最小的f
p
(φ)对应的角度φ。同样,如果只考虑幅度偏差,那么未校准的导向矢量表示为:
[0032][0033]
利用af(φ)获得准确的估计方位,即
[0034][0035]
由于ghrg=tr(rggh),那么表示为:
[0036][0037]
的对角线元素都是1;
[0038]
同样,表示为:
[0039][0040]
的对角线元素都是实数。
[0041]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,根据公式(4)、公式(6)、公式(7)和公式(8),利用公式(9)求解a
p
(φ)和af(φ):
[0042][0043]
然而公式(9)不能被直接求解,因为a
p
(φ)和af(φ)是未知变量,公式(9)中包含了未知变量的高阶运算和因此公式(9)np难的非凸优化问题。
[0044]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,将表示为q1,并且将表示为q2,很显然q1和q2是hermitian矩阵,并且它们是半正定矩阵,用q1≥0和q2≥0表示;因此公式(9)重新表示为:
[0045][0046]
优化函数公式(10)为凸的半正定规划sdp问题,使用现成的sdp解算器来求解进行求解q1和q2矩阵。
[0047]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,分别利用q1矩阵和q2矩阵求解a
p
(φ)和af(φ);
[0048]
求解a
p
(φ):由于a
p
(φ)是m维列向量,理论上q1是秩为1的矩阵,如果rank(q1)=1,则通过特征分解求解a
p
(φ);但是由求解的q1的秩可能不为1,如果rank(q1)≥2,则需要采用秩一分解定理来找到最优的
[0049]
同样,利用q2和秩一分解定理求解
[0050]
现在已经获得了和下面求解相位偏差ψe和幅度偏差ae;根据公式(3)和公式(5),利用公式(11)来求解并且利用公式(12)来求解
[0051][0052][0053]“/”表示两个向量的对应元素相除。
[0054]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,对于观察空间角度θ,与错误阵列相匹配的导向矢量表示为:
[0055][0056]
称为校准导向矢量;将得到的作为真实导向矢量用于实际应用中获得精确的估计结果,music方法估计目标方位的表达式为:
[0057][0058]
一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法步骤。
[0059]
本发明的有益效果是:
[0060]
本发明能准确的求解所有阵元的幅度和相位偏差,利用该结果找到与有误差阵列相匹配的导向矢量,将该导向矢量用于后续的doa估计可以降低估计结果受阵列误差的影响。对于本发明算法,分别考虑了具有幅度误差和具有相位误差的导向矢量的特性,并且根据music方法的思想构造用于求解有误差的导向矢量的优化函数。为了求解该优化函数,将其转化为凸的半正定规划(sdp)问题,然后并结合秩一分解定理求解具有相位误差的导向矢量。然后根据求解的导向矢量获得阵元的幅度和相位偏差。理论分析与仿真结果表明,本发明可以准确计算出阵列的幅度偏差和相位偏差,将校准导向矢量用于高分辨doa算法可以提高包含双目标分辨概率、估计精度的doa估计性能。另外,本发明算法不限制阵列形状,可用于校准多种形状的阵列的幅度相位误差。
[0061]
本发明可以准确估计阵列的幅度相位误差。music方法受阵列误差影响很大。
[0062]
本发明有效改善music方法的性能,包括双目标分辨概率和估计精度。
附图说明
[0063]
图1是本发明的方法流程图。
[0064]
图2是本发明的阵列和信号位置几何关系图。
[0065]
图3是本发明的幅度偏差和相位偏差的真实值和估计值图,其中,图3-(a)为幅度偏差的真实值和估计值图;图3-(b)为相位偏差的真实值和估计值图。
[0066]
图4是本发明的均匀直线阵方位谱图。
[0067]
图5是本发明的均匀圆阵和非均匀直线阵方位谱图,其中,图5-(a)为均匀圆阵方位谱图;图5-(b)为非均匀直线阵方位谱图。
[0068]
图6是本发明的mse和分辨概率随阵元个数变化情况示意图,其中,图6-(a)为mse随阵元个数变化情况示意图;图6-(b)为分辨概率随阵元个数变化情况示意图。
具体实施方式
[0069]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0070]
秩一分解定理为根据一个已知矩阵,将其分解为一个向量,使得该向量与其自身的共轭转置的乘积等于该矩阵。
[0071]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明所述校准方法具体包括以下步骤:
[0072]
步骤1:对采集的水声目标的阵元信号进行特征值分解;
[0073]
步骤2:利用步骤1采集的阵元信号,求解每个阵元的幅度偏差和相位偏差;
[0074]
步骤3:利用步骤2求解出的幅度偏差和相位偏差,获得与未校准阵列相匹配的校准导向矢量;
[0075]
步骤4:利用步骤3的校准导向矢量进行doa估计。
[0076]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明所述步骤1采集的水声目标的阵元信号具体为,假设一个远场平面波入射到一个m个阵元的任意形状的阵列如图2所示,平面波入射方向θ是信号方向与y轴方向的夹角;其中第m个阵元的位置表示为(xm,ym);
[0077]
如果空间中有k个窄带信号,第k个信号表示为sk(t);阵列接收数据表示为:
[0078][0079]
表示k个目标的阵列流行向量,s(t)和n(t)是接收信号和噪声矩阵,s(t)=[s1(t),...,sk(t)]
t
,n(t)=[n1(t),...,nm(t)]
t
。
[0080]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明假设阵列采集到的噪声是满足时空不相关性的零均值高斯白噪声,并且k个信号之间互不相关,那么x(t)的协方差矩阵r
x
=e[x(t)xh(t)]表示为r
x
=rs+rn,其中是的协方差矩阵;
[0081]
将r
x
进行特征值分解,得到:
[0082][0083]
其中us和表示信号子空间;uw表示噪声子空间。
[0084]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明所述步骤2求解每个阵元的幅度偏差和相位偏差具体包括以下步骤:
[0085]
步骤2.1:设计用于求解幅度偏差和相位偏差的优化算法;
[0086]
步骤2.2:利用秩一分解定理基于步骤1的优化算法,求解幅度偏差和相位偏差。
[0087]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明所述步骤2.1的优化算法具体为,没有偏差的导向矢量为a(θ)=[μ1,
…
,μm],其中κ=2π/λ;
[0088]
假设m个阵元的幅度偏差为ae=[a1,
…
,am],相位偏差表示为ψe=[η1,
…
,ηm],其中那么第m个阵元的导向矢量偏差为
[0089]
假设阵列校准时单目标的方位为φ,如果只考虑相位偏差,那么未校准的导向矢量表示为:
[0090][0091]
其中
“”
表示哈达玛乘积,也就是两个向量对应元素相乘,那么利用a
p
(φ)获取准确的估计方位,即
[0092][0093]
表示获得最小的f
p
(φ)对应的角度φ。同样,如果只考虑幅度偏差,那么未校准的
导向矢量表示为:
[0094][0095]
利用af(φ)获得准确的估计方位,即
[0096][0097]
由于ghrg=tr(rggh),那么表示为:
[0098][0099]
的对角线元素都是1;
[0100]
同样,表示为:
[0101][0102]
的对角线元素都是实数。
[0103]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明根据公式(4)、公式(6)、公式(7)和公式(8),利用公式(9)求解a
p
(φ)和af(φ):
[0104][0105]
然而优化函数(9)不能被直接求解,因为a
p
(φ)和af(φ)是未知变量,公式(9)中包含了未知变量的高阶运算和因此公式(9)是不能被直接求解的的非凸优化问题。
[0106]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,为了求解公式(9)本发明将表示为q1,并且将表示为q2,很显然q1和q2是hermitian矩阵,并且它们是半正定矩阵,用q1≥0和q2≥0表示;因此公式(9)重新表示为:
[0107][0108]
优化函数公式(10)为凸的半正定规划sdp问题,使用现成的sdp解算器,例如sdpt3和cvx凸优化工具箱来求解进行求解q1和q2矩阵。
[0109]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明分别利用q1矩阵和q2矩阵求解a
p
(φ)和af(φ);
[0110]
求解a
p
(φ):由于a
p
(φ)是m维列向量,理论上q1是秩为1的矩阵,如果rank(q1)=1,则通过特征分解求解a
p
(φ);但是由求解的q1的秩可能不为1,如果rank(q1)≥2,则需要采用秩一分解定理来找到最优的
[0111]
求解af(φ):由于af(φ)是m维列向量,理论上q2是秩为1的矩阵,如果rank(q2)=1,则通过特征分解求解a
p
(φ);但是由求解的q2的秩可能不为1,如果rank(q2)≥2,则需要采用秩一分解定理来找到最优的
[0112]
即同样利用q2和秩一分解定理求解
[0113]
现在已经获得了和下面求解相位偏差ψe和幅度偏差ae;根据公式(3)和公式(5),利用(11)来求解并且利用(12)来求解
[0114][0115][0116]“/”表示两个向量的对应元素相除。
[0117]
一种基于秩一分解定理的水声目标阵列幅度相位误差校准方法,本发明对于观察空间角度θ,与错误阵列相匹配的导向矢量表示为:
[0118][0119]
称为校准导向矢量;将得到的作为真实导向矢量用于实际应用中获得精确的估计结果,music方法估计目标方位的表达式为:
[0120][0121]
一种计算机可读存储介质,本发明所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法步骤。
[0122]
很多高分辨doa估计算法具有弱鲁棒性,其性能经常受到阵列偏差的影响,以至于不能发挥其高分辨能力,甚至不能有效估计目标方位。因此针对阵列的幅度相位偏差,本发明提出了一种阵列校正方法。首先,设计用于估计幅度相位偏差的优化算法,将其转化为sdp问题求解,然后,应用秩一分解定理求解每个阵元的幅度偏差和相位偏差,该求解的偏差可以用于修正阵列,但是更简单的用法是利用求解的偏差找到与实际阵列相匹配的校准
导向矢量,将校准导向矢量用于后续的doa估计方法可以有效降低阵列偏差对高分辨doa估计算法的影响。本发明方法适用于各种形状的平面阵列。理论分析与仿真结果表明,本发明的方法可以准确计算出阵列的幅度偏差和相位偏差,将校准导向矢量用于高分辨doa算法可以提高doa估计性能。
[0123]
利用music方法来验证本发明的阵列校正能力。由于均匀直线阵是最常见的阵列,其性能被广大学者所熟知,因此本节中的主要利用均匀直线阵进行仿真。假设阵列是阵元间距为半波长的均匀直线阵,信号快拍数为500。第m个阵元的偏差表示为请注意仿真中幅度偏差为am,相位偏差的输入量为(单位为
°
).
[0124]
假设8元均匀直线阵的幅度偏差为1,0.7,0.4,3,1.8,0.9,1.2,1.5,相位偏差为12
°
,30
°
,-10
°
,10
°
,-20
°
,16
°
,-10
°
,20
°
。图3显示了当校正信噪比为10db时的相位偏差和幅度偏差的真实值和估计值。图3中可以看出相位和幅度的估计偏差都近似于真实偏差。图3可以初步验证本发明的有效性。
[0125]
同样是图3所述有偏差的均匀直线阵,假设空间中有两个互不相关的信号,其方位分别是0
°
和7
°
,环境信噪比也为10db,其方位谱如图4所示。另外,作为对比,在图中加入没有幅度相位偏差阵列的仿真结果。图4可以看出有偏差的阵列不能准确分辨两个目标,而校准之后的阵列可以清晰地分辨两个目标,并且准确估计目标方位,其方位谱接近于没有偏差的阵列的方位谱。
[0126]
阵列校正方法适用于所有形状的平面阵列,因此图5给出了8元均匀圆阵和8元非均匀线阵的方位谱,其中均匀圆阵的半径为1.5λ,非均匀线阵的阵元位置为[0 3 4 5 7 9 10 13]
×
λ/2,校正信噪比和环境信噪比都为10db,双目标方位为0
°
和7
°
。两种阵列的8个阵元的幅度偏差为1,0.7,0.4,3,1.8,0.9,1.2,1.5,相位偏差为12
°
,30
°
,-10
°
,10
°
,-20
°
,16
°
,-10
°
,20
°
。图5可以看出有偏差的均匀圆阵阵列和非均匀线阵都不能清晰地区分两个目标,而校准之后的阵列可以清晰地分辨两个目标,并且准确估计目标方位。
[0127]
估计精度和分辨概率随阵元个数的变化情况如下:
[0128]
针对阵元间距为半波长的均匀直线阵,本小节研究阵列校正后在不同校正信噪比、环境信噪比、阵元个数和双目标角度间隔的情况下doa估计性能。本小节中相位偏差和幅度偏差都是随机的,假设幅度偏差在为0至10之间的随机数,相位偏差为-90
°
到90
°
之间的随机数。利用均方误差(mean squared error:mse)来判断方位估计的准确程度。另外,如果方位估计结果满足,则判定为成功分辨两个目标
[21],[22]
.
[0129][0130]
其中θ1和θ2表示两个目标真实方位,和分别表示第t次蒙特卡洛实验的两个目标的估计方位。如果总共进行f次试验,其中有f次试验的估计结果满足,那么分辨概率为f/f。规定如果分辨概率为0表示无法区分两个目标,图中用“ud”表示。下面利用mse和rp来考察扩展阵元后算法的估计精度和分辨双目标能力。
[0131]
图6考察双目标doa估计性能随阵元个数的变化情况。图6假设阵元个数从5增加到25,所有阵元都具有随机的幅度偏差和相位偏差。校正信噪比和环境信噪比都为10db,双目标方位仍然为0
°
和7
°
。
[0132]
从图6中可以看出没有偏差的阵列具有很低的估计误差,并且其分辨概率几乎始终为100%。有偏差的阵列的分辨概率较低,当阵元个数超过23时才具有超过50%的分辨概率。相比之下,校正阵列的分辨概率显著提升,当阵元个数超过7时,校正阵列的分辨概率超过90%。校正阵列的估计误差随着阵元个数的增加而逐渐降低。
[0133]
当阵列孔径较小时,cbf方法的分辨力低,此时高分辨算法被实际应用中。高分辨算法可以区分空间中角度间隔相差较小的两个目标,可以防止漏检目标,并且提高感兴趣目标的方位估计精度。然而很多高分辨doa估计算法具有较弱的鲁棒性,其性能经常受到阵列偏差的影响,以至于不能发挥其高分辨能力,甚至不能有效估计目标方位。如果能修正阵列误差,或者获得与有偏差阵列相匹配的导向矢量,那么可以改善高分辨doa估计算法的性能。因此针对阵列的幅度相位偏差,提出了一种阵列校正方法。
[0134]
本发明设计用于估计幅度相位偏差的优化算法,并将其转化为sdp问题求解,然后,应用秩一分解定理求解每个阵元的幅度偏差和相位偏差,最后,利用求解的偏差获得与实际阵列匹配的校准导向矢量,并将校准导向矢量用于doa估计方法中。仿真中,利用基于music方法的均匀直线阵来验证本发明的有效性。仿真结果表明,本发明可以准确估计阵列的幅度相位误差。music方法受阵列误差影响很大,本发明有效改善music方法的性能,包括双目标分辨概率和估计精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1