低能耗和高时效性的无人机网络数据采集与传输控制方法
1.本发明涉及无人机技术领域,尤其涉及一种低能耗和高时效性的无人机网络数据采集与传输控制方法。
背景技术:
2.我国幅员辽阔,自然灾害频发,灾害发生后由于山地密林地区基础设施的缺乏或巨大灾害造成的基础设施损坏,导致灾区救援人员无法了解灾区具体受灾情况的问题。随着移动自组网技术的发展,利用无人机采集与传输灾区信息,为上述问题提供了解决方法。然而,利用无人机在恶劣应急现场进行数据信息的采集和传输仍面临一些技术挑战。第一,由于节点间距离过长或地形遮挡会导致节点间无法全连接,因此需要通过组网内其他节点的多跳传输实现信息共享,使地面节点可以通过任一无人机节点获取数据包;第二,应急救援场景对采集信息时效性的高要求和无人机有限能耗间存在的矛盾,让上述采集与通信组网无法高效运行;第三,为了保证组网中共享的灾情信息的时效性,采样无人机倾向于最大化数据采集频率与组网中所有节点的数据包更新频率,然而,组网中无限制的数据采集与无策略的信息共享会导致无线链路的拥塞,传输时延增加,信息的时效性减弱,同时还会导致无人机有限的能量资源消耗过快,组网存活时间降低。为了在尽可能降低能耗的情况下,保证无人机节点处存储的信息具有一定时效性,设置采集无人机的最佳采集频率的以及设计数据包的路由调度策略十分关键。
3.为了度量信息的时效性,引入信息年龄(age of information,aoi)做为量化指标。当前,许多aoi相关的研究工作集中在单跳传输网络中,针对不同队列模型下的区别、无人机路径规划问题以及无线传感网络场景等进行研究,少有在多跳传输网络中的研究,更未考虑过应急无人机组网场景以及其中的能耗问题。为此本发明立足应急无人机多跳传输场景考虑内容的时效性和能耗有限性问题,针对采样和调度策略进行协同优化。
技术实现要素:
4.本发明提供一种低能耗和高时效性的无人机网络数据采集与传输控制方法,用以解决现有技术中无人机能量消耗过快的技术问题。
5.本发明提供一种低能耗和高时效性的无人机网络数据采集与传输控制方法,包括:
6.基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
7.基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
8.基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,
得到最小平均能耗;
9.基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
10.其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间基于总时隙个数和每个时隙对应的时间长度确定。
11.在一些实施例中,所述确定所述每个时隙内所有无人机节点的能耗之前,还包括:
12.基于所述无人机采样节点在所述每个时隙内产生的数据包,确定所述无人机采样节点在每个时隙内消耗的能量和数据包aoi;
13.基于所述传输调度策略、所述路由策略、所述数据包aoi和无人机节点aoi,分别确定所述平均aoi、所述所有无人机节点在所述每个时隙内接收数据包消耗的能量,以及所述所有无人机节点在所述每个时隙内发送数据包消耗的能量;
14.其中,所述数据包aoi为每个无人机节点中的每个数据包的aoi,所述无人机节点aoi为每个无人机节点中最新接收到的数据包的aoi。
15.在一些实施例中,所述基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗,包括:
16.基于所述每个时隙内所有无人机节点的能耗,构建目标函数;
17.基于所述李雅普诺夫优化理论,将所述目标约束条件转换为采样队列和aoi队列;
18.基于所述采样队列和所述aoi队列的动态变化情况,在确定所述网络平均aoi小于aoi阈值的情况下,得到所述最小总能耗;
19.所述目标约束条件基于所述无人机采样节点在所述每个时隙内对每种业务对应的数据包采样的平均次数、每个无人机节点中所述每种业务对应的数据包在所述每个时隙内的平均aoi、所述无人机节点在所述每个时隙内传输的数据包以及所述无人机节点在每个时隙内选择的下一跳节点确定。
20.在一些实施例中,所述目标函数通过下式表示:
[0021][0022]
其中,t为所述总时隙个数;
[0023][0024]
e(t)为t时隙内所有无人机节点的能量消耗;
[0025]
为所述无人机采样节点在所述t时隙内消耗的能量;
[0026]
为所有无人机节点在所述t时隙内接收数据包消耗的能量;
[0027]
为所有无人机节点在所述t时隙内发送数据包消耗的能量;
[0028]
是业务b的采样耗能系数,是业务b的接收耗能系数,是业务b的发送耗能系数,用于表示所述无人机采样节点s是否产生业务b的数据包,用于表示所述无人机节点在所述t时隙内是否选择传输由所述无人机采样节点s产生的业务b的数据包,y
ji
(t)用于表示在所述t时隙内无人机节点j是否将数据包传送到无人机节点i,y
ij
(t)用于表示在所述t时隙内无人机节点i是否将数据包传送到无人机节点j。
[0029]
在一些实施例中,所述目标约束条件为:
[0030][0031][0032][0033][0034][0035][0036][0037]
其中,用于表示所述无人机节点在所述t时隙内是否选择传输由无人机采样节点s产生的业务b的第k个数据包,用于表示第i个无人机节点中业务b对应的平均aoi,y
ni
(t)用于表示在t时隙无人机节点n是否发送数据包至无人机节点i,表示所述无人机节点总个数,表示所述无人机采样节点的总个数,表示业务数据的种类总数,kb表示无人机采样节点在t个时隙内能采集的业务b的数据包的最大数量。
[0038]
本发明还提供一种低能耗和高时效性的无人机网络数据采集与传输控制装置,包括:
[0039]
第一确定模块,用于基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
[0040]
第二确定模块,用于基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
[0041]
第三确定模块,用于基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0042]
第四确定模块,用于基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
[0043]
其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间
基于总时隙个数和每个时隙对应的时间长度确定。
[0044]
在一些实施例中,所述装置还包括:
[0045]
第五确定模块,用于基于所述无人机采样节点在所述每个时隙内产生的数据包,确定所述无人机采样节点在每个时隙内消耗的能量和数据包aoi;
[0046]
第六确定模块,用于基于所述传输调度策略、所述路由策略、所述数据包aoi和无人机节点aoi,分别确定所述平均aoi、所述所有无人机节点在所述每个时隙内接收数据包消耗的能量,以及所述所有无人机节点在所述每个时隙内发送数据包消耗的能量;
[0047]
其中,所述数据包aoi为每个无人机节点中的每个数据包的aoi,所述无人机节点aoi为每个无人机节点中最新接收到的数据包的aoi。
[0048]
本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述低能耗和高时效性的无人机网络数据采集与传输控制方法。
[0049]
本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述低能耗和高时效性的无人机网络数据采集与传输控制方法。
[0050]
本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述低能耗和高时效性的无人机网络数据采集与传输控制方法。
[0051]
本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法,能够最大程度的限制能量消耗,从而获得最小平均能量消耗。
附图说明
[0052]
为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0053]
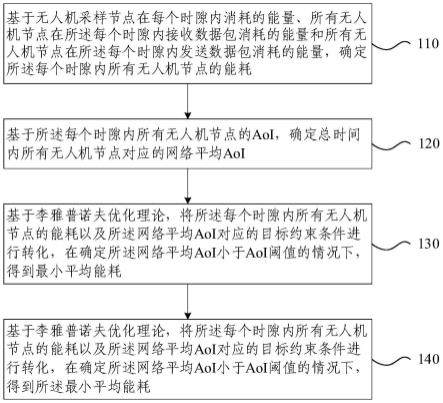
图1是本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的流程示意图;
[0054]
图2是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的数据采集和传输示意图;
[0055]
图3是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的传输调度与路由策略示意图;
[0056]
图4是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的采样流程示意图;
[0057]
图5是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的传输调度与路由选择流程示意图;
[0058]
图6是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的节点分布示意图;
[0059]
图7是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的aoi示意图之一;
[0060]
图8是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的平均aoi变化示意图;
[0061]
图9是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的总能耗变化示意图;
[0062]
图10是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的aoi示意图之二;
[0063]
图11是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的aoi示意图之三;
[0064]
图12是应用本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的算法时间复杂度示意图;
[0065]
图13是本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制装置的结构示意图;
[0066]
图14是本发明提供的电子设备的实体结构示意图。
具体实施方式
[0067]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
本发明立足无人机应急组网场景,考虑无人机组网的信息采集与节点间信息共享,其中无人机采样节点采集灾情信息,并将信息共享至所有无人机传输节点,对于超出通信距离或信号被遮挡的节点,通过数据的多跳传递实现信息共享。本发明考虑了采集频率对能耗以及采集信息时效性的影响,频率过高导致能耗过快,频率过低导致信息时效性差;进一步地,本发明还考虑了数据类型的传输调度以及节点间的多跳路由选择对网络信息时效性的影响,对于传输节点,源节点与路由路径的选择决定了接收到数据的时效性。综上所述,为了保证采集信息时效性和能耗最小化,本发明提出了一种低能耗的面向信息年龄的无人机组网采样和传输联合优化方法,针对信息采样节点,控制其采样频率,保证信息更新,同时限制能量消耗情况;针对采样节点和传输节点,控制数据包传输方法,设计分享路径,保持网络的信息时效性。为同时满足能耗和时效性要求,将信息时效性转化为虚拟队列稳定性的问题,利用李雅普诺夫优化技术描述两者之间的权衡,将采样与传输路由调度问题解耦为两个独立问题,分别设计解决算法,在保证信息时效性保持在一定范围内的情况下,使总能耗最小。
[0069]
图1为本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法的流程示意图。参照图1,本发明提供一种低能耗和高时效性的无人机网络数据采集与传输控制方法,可以包括:步骤110步骤120、步骤130和步骤140。
[0070]
步骤110、基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在每个时隙内接收数据包消耗的能量、所有无人机节点在每个时隙内发送数据包消耗的能量,确定每个时隙内所有无人机节点的能耗;
[0071]
步骤120、基于每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点
对应的网络平均aoi;
[0072]
步骤130、基于李雅普诺夫优化理论,将每个时隙内所有无人机节点的能耗以及网络平均aoi对应的目标约束条件进行转化,在确定网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0073]
步骤140、基于网络平均aoi和最小平均能耗,确定无人机采样节点在时隙内的采样策略和所有无人机节点在每个时隙内的传输调度策略和路由策略;
[0074]
其中,无人机节点包括无人机采样节点和无人机传输节点,总时间基于总时隙个数和每个时隙对应的时间长度确定。
[0075]
在实际执行中,可以考虑一个时隙系统,将观察时期分为个时隙,集合表示为
[0076]
如图2所示,将空间分为空中部分和地面部分两个面积为x*y大小的平面,无人机节点分布在空中平面上,救援人员节点分布在地面平面上。假设场景中有n个无人机节点,将无人机节点的索引定义为
[0077]
其中有s个采样无人机装载了信息采集设备,用于收集灾情信息并将数据散播至传输无人机节点处,将无人机采样节点的索引定义为
[0078]
剩余r个无人机节点为无人机传输节点,用于作为无人机之间信息分享以及将本地信息传输至地面节点,将传输无人机节点的索引定义为地信息传输至地面节点,将传输无人机节点的索引定义为
[0079]
由于灾区信息种类的多样性,采样无人机搭载多种类型的采集设备(例如温度传感器、湿度传感器、摄像头等)对不同信息进行采集,假设共有b种不同的采集设备,将采样无人机从不同采集设备收集的数据分为b种不同的业务数据,将业务数据的索引定义为用kb表示无人机采样节点在t个时隙内能采集的最大业务b数据包的数量。
[0080]
记d0为任一无人机节点的最大通信距离,相互距离小于d0的两节点间存在通信链路。假设空中平面和地面平面的距离小于d0,即任一无人机节点飞行至任一地面节点上方时,可以进行数据传输。考虑传输无人机无法获得救援节点的准确位置,只能采取“机会传输”的策略,即在两者碰巧在传输范围内时进行数据传输。
[0081]
在步骤110中,每个时隙内所有无人机节点的能量消耗包括:
[0082]
一、无人机采样节点在每个时隙内消耗的能量;
[0083]
二、所有无人机节点在每个时隙内接收数据包消耗的能量;
[0084]
三、所有无人机节点在每个时隙内发送数据包消耗的能量。
[0085]
在实际执行中,将上述无人机应用场景可以构建成采样模型、路由与传输调度模型、队列模型以及aoi模型,如下所述:
[0086]
(一)传输调度与路由模型
[0087]
在每个时隙中,每个无人机节点都需要进行传输调度,即确定在此时隙中本无人机节点所要传输的数据包来源和对应的业务类型。使用二元变量表示在t时隙的数据包传输情况,当某无人机节点在t时隙选择传输由无人机采样节点s产生的业务b的第k个数据包时,其对应状态值为1,否则为0。考虑所有无人机节点在相同频段上传输,为避免干扰,
单个无人机节点同一时隙最多只能传输一种业务的一个数据包,即满足以下约束:
[0088][0089]
每个无人机节点还需要进行路由选择,即在每个时隙中本无人机节点需要选择下一跳发给哪个邻居节点,使用二元变量y
ij
(t)表示在t时隙无人机节点i是否发送数据包至无人机节点j,y
ni
(t)表示在t时隙无人机节点n是否发送数据包至无人机节点i,如果发送则其值为1,否则为0。假设无人机节点工作在半双工模式下,无人机节点无法同时收发,因此有以下约束,其中表示在i通信范围内的节点集合。
[0090][0091]
(二)采样模型
[0092]
由于每个时隙每个无人机节点只能发送一个数据包,为了保证数据包的时效性,每个无人机节点在每个时隙也只产生一个数据包。
[0093]
因此,用二元变量表示t时隙无人机采样节点是否产生业务的数据包,若t时隙产生此数据包,则其值为1,否则为0。
[0094]
将无人机采样节点是否产生业务的第k个数据包用二元变量表示,若产生此数据包,则其值为1,否则为0。与的关系如下:
[0095][0096]
在实际执行中,基于无人机采样节点在每个时隙内产生的数据包以及数据包对应的某一业务的采样耗能系数,可以确定无人机采样节点在每个时隙内消耗的能量。采样耗能系数根据无人机数据采集需求确定,在此不作具体限定。
[0097]
数据包的生成时间以时隙为单位,用表示无人机采样节点s产生业务b的第k个数据包的时间,的计算方法如下式:
[0098][0099]
为了保证参与救援的无人机节点获取灾区的全面信息,需要保证每种业务的传输量,因此要对每个无人机采样节点每种业务的平均采样次数进行最小值约束,保证其大于阈值用表示无人机采样节点s采样的业务b数据包的时间平均次数,约束不等式如下所示:
[0100][0101]
(三)队列模型
[0102]
每个无人机节点都维护b个业务队列以存储不同业务的数据包,每个队列的最大长度为q,队列遵循先来先服务(first come first service,fcfs)原则,若无人机节点处新到数据包而队列已满,则将队列中最先到达的数据包丢弃。用向量表示无人机节点i
在t时隙业务b队列的状态,用表示队列中第x个数据包为无人机采样节点s
x
采样的第k个业务b数据包。
[0103][0104]
(四)aoi模型
[0105]
在一些实施例中,确定每个时隙内所有无人机节点的能耗之前,还包括:
[0106]
基于无人机采样节点在每个时隙内产生的数据包,确定无人机采样节点在每个时隙内消耗的能量和数据包aoi;
[0107]
基于传输调度策略、路由策略、数据包aoi和无人机节点aoi,分别确定平均aoi、所有无人机节点在每个时隙内接收数据包消耗的能量,以及所有无人机节点在每个时隙内发送数据包消耗的能量;
[0108]
其中,数据包aoi为每个无人机节点中的每个数据包的aoi,无人机节点aoi为每个无人机节点中最新接收到的数据包的aoi。
[0109]
本发明以时隙为单位计量aoi。用表示t时隙无人机节点i是否将无人机采样节点s采样的业务b的数据包传输到无人机节点j,若传输则其值为1,否则为0。表示t时隙无人机节点j是否将无人机采样节点s采样的第k个业务b数据包传输到无人机节点i,若传输,则其值为1,否则为0。两者关系如下:
[0110][0111]
在实际执行中,为进行数据包传输,基于无人机节点在每个时隙内选择的下一跳节点与数据包对应的某一业务的接收耗能系数,可以确定无人机节点在每个时隙内接收数据包消耗的能量。接收耗能系数根据无人机数据传输需求确定,在此不作具体限定。
[0112]
为进行数据包接收,基于无人机节点在每个时隙内选择的下一跳节点与数据包对应的某一业务的发送收耗能系数,可以确定所有无人机节点在每个时隙内发送数据包消耗的能量。发送耗能系数根据无人机数据传输需求确定,在此不作具体限定。
[0113]
aoi根据主体不同可以分为数据包的aoi与节点aoi两种。数据包的aoi就是数据包从产生开始经过的时间;节点aoi就是节点处最新信息的年龄,即最新接收到的数据包的aoi。
[0114]
由于无人机采样节点只向外传输数据包,不接收数据包,因此对无人机采样节点不需要aoi约束。
[0115]
aoi的具体更新规则如下:
[0116]
1、对于数据包的aoi,数据包在t+1时隙的aoi即为当前时隙减数据包的生成时隙,即
[0117]
2、对于无人机传输节点aoi,节点处某业务在t+1时隙的aoi变化根据当前时隙节点有没有接收到此业务的数据包判断,节点若没有接收到此数据包,则节点处此数据包在t+1时隙的aoi为t时隙aoi值加一个时隙,若接收到此数据包数据包,则t+1时隙aoi变为此数据包aoi。因此t+1时隙i节点处b业务的aoi如下:
[0118][0119]
上式第一部分表示t时隙无人机节点i没有接收到无人机采样节点s采样的业务b的数据包,表示无人机节点i处业务b的aoi相比上一时隙增加1;
[0120]
第二部分表示t时隙i节点接收到了无人机采样节点s采样的第k个业务b数据包,表示无人机节点i处业务b的aoi变为此数据包的aoi。
[0121]
3、对于无人机采样节点,由于无人机采样节点不直接向地面节点传输数据,其aoi对信息时效性能无影响,因此将其所有aoi设为常数0。
[0122]
为了保证无人机传输节点处的每种业务的信息具有一定时效性,使每个无人机传输节点每个业务的平均信息年龄小于阈值a(a》0)。
[0123]
对于无人机采样节点,ε为任意大于0的数)恒成立。因此可以将此约束推及所有无人机节点,如下:
[0124][0125]
在一些实施例中,基于李雅普诺夫优化理论,将每个时隙内所有无人机节点的能耗以及网络平均aoi对应的目标约束条件进行转化,在确定网络平均aoi小于aoi阈值的情况下,得到最小平均能耗,包括:
[0126]
基于每个时隙内所有无人机节点的能耗,构建目标函数;
[0127]
基于李雅普诺夫优化理论,将目标约束条件转换为采样队列和aoi队列;
[0128]
基于采样队列和aoi队列的动态变化情况,在确定网络平均aoi小于aoi阈值的情况下,得到最小总能耗;
[0129]
目标约束条件基于无人机采样节点在每个时隙内对每种业务对应的数据包采样的平均次数、每个无人机节点中每种业务对应的数据包在每个时隙内的平均aoi、无人机节点在每个时隙内传输的数据包以及无人机节点在每个时隙内选择的下一跳节点确定。
[0130]
由于无人机能量有限,为了使无人机网络生存时间尽可能长,本发明以总时间内所有无人机节点的最小平均能量消耗为优化目标。
[0131]
在实际执行中,每个时隙内所有无人机节点的能耗可以通过下式表示:
[0132][0133]
其中,e(t)为第t个时隙所有无人机节点的能量消耗;
[0134]
第一项为无人机采样节点在t时隙内消耗的能量;第二项为所有无人机节点在t时隙内接收数据包消耗的能量;第三项为所有无人机节点在t时隙内发送数据包消耗的能量;
[0135]
是业务b的采样耗能系数,是业务b的接收耗能系数,是业务b的发送耗能系数,用于表示无人机采样节点s是否产生业务b的数据包,用于表示无人机节点在t时隙内是否选择传输由无人机采样节点s产生的业务b的数据包,y
ji
(t)用于表示在t时隙内无人机节点j是否将数据包传送到无人机节点i,y
ij
(t)用于表示在t时隙内无人机节点i是否将数据包传送到无人机节点j。
[0136]
用于表示t时隙无人机节点j是否将无人机采样节点s采样的业务b的数据包传送到无人机节点i,用于表示t时隙无人机节点i是否将无人机采样节点s采样的业务b的数据包传送到无人机节点j。
[0137]
在实际执行中,为了保证无人机节点获取灾区的全面信息,需要保证每种业务的传输量,因此要根据无人机采样节点在每个时隙内产生的数据包的次数,对每个无人机采样节点每种业务的平均采样次数进行最小值约束,保证其大于采样次数阈值。
[0138]
考虑所有无人机节点在相同频段上传输,为避免干扰,单个无人机节点同一时隙最多只能传输一种业务的一个数据包,则有无人机节点在每个时隙内传输的数据包的个数大于等于0且小于等于1。
[0139]
为了保证无人机节点处的每种业务的信息具有一定时效性,基于无人机节点中每个数据包对应的信息年龄,使每个无人机节点中每个业务的平均aoi小于信息年龄阈值。
[0140]
每个无人机节点还需要进行路由选择,即在每个时隙中本无人机节点需要选择下一跳发给哪个邻居节点,因此,基于无人机节点在每个时隙内选择的下一跳节点,假设无人机节点工作在半双工模式下,无人机节点无法同时收发,因此对每个时隙内无人机节点是否发送数据包至下一跳无人机节点进行约束。
[0141]
基于每个时隙内所有无人机节点的能耗,构建目标函数。目标函数即为最小平均消耗对应的函数,如下所示:
[0142][0143]
其中,t为总时隙个数;
[0144]
在一个实施例中,目标约束条件为:
[0145][0146][0147][0148][0149][0150][0151]
[0152]
其中,用于表示无人机节点在t时隙内是否选择传输由无人机采样节点s产生的业务b的第k个数据包,用于表示第i个无人机节点中业务b对应的平均信息年龄,y
ni
(t)用于表示在t时隙无人机节点n是否发送数据包至无人机节点i,表示无人机节点总个数,表示无人机采样节点的总个数,表示业务数据的种类总数,kb表示无人机采样节点在t个时隙内能采集的业务b的数据包的最大数量。
[0153]
在实际执行中,为总时间平均耗能,优化问题建模为p1:
[0154][0155][0156][0157][0158][0159][0160][0161][0162]
上述(10a)至(10g)均为目标约束条件。
[0163]
在问题(10)中,优化目标为得到最小平均能耗目标约束条件(10a)表示无人机节点的采样情况只有采样和不采样两种情况,目标约束条件(10b)表示无人机节点的平均采样数量大于阈值,目标约束条件(10c)表示无人机节点平均aoi小于阈值,目标约束条件(10d)表示数据包传输情况只有传输和不传输两种情况,目标约束条件(10e)表示同一无人机节点在一个时隙内最多只能采集一种业务的一个数据包,目标约束条件(10f)表示无人机节点间的路由选择只有传输和不传输两种情况,目标约束条件(10g)表示无人机节点工作在半双工模式。
[0164]
为了满足式(5)和式(8)的约束,即目标约束条件(10b)和(10c),将采样和aoi约束转化为虚拟队列稳定性问题。具体来说,定义两个虚拟队列分别表示采样队列和aoi队列。则两个虚队列在每个时隙的动态变化情况为:
[0165][0166][0167]
用李雅普诺夫函数l(θ(t)),如式(13)所示,来度量系统的稳定性。
[0168][0169]
利用式(14)所示的李雅普诺夫漂移理论来衡量连续时隙间系统队列状态的变化
(π)变为:
[0189][0190]
其中e为常数。式(22)共有五项,第一项为常数,第三项和第五项为系统状态变量,因此不难看出,采样决策变量只与第二项有关,传输调度与路由决策变量只与第三项有关,因此,可以将最小化(p)下界的问题解耦成采样和路由传输两个子问题,即(p2)和(p3)。
[0191][0192][0193]
在问题(23)中,表示在t时隙的采样情况,表示采样虚拟队列,为常数,表示一次采样的耗能,为常数,表示最少采样阈值。(23a)约束表示节点的采样情况只能有两种:采样为1,不采样为0。
[0194][0195][0196][0197][0198][0199]
在问题(24)中,表示无人机节点i在t时隙的传输调度与路由策略,如图3所示,表示传输调度策略,即是否选择由无人机采样节点s采集的第k个业务b数据包,y
ji
(t)表示路由策略,即无人机节点i是否从邻居节点j处接收数据包。表示aoi虚拟队列,表示无人机节点处的aoi,表示数据包的产生时间,表示节点收发数据产生的能耗。约束(24a)表示数据包传输调度行为只有两种可能,传输为1,不传输为0。约束(24b)表示节点间的路由选择只有传输和不传输两种情况,约束(24c)表示无人机节点工作在半双工模式,约束(24d)表示数据包的生成时间在系统运行时间范围内。
[0200]
本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制方法,在同时满足能耗和时效性要求的情况下,将信息时效性转化为虚拟队列稳定性的问题,利用李雅普诺夫优化技术描述两者之间的权衡,将采样与传输路由调度问题解耦为两个独立问题,分别设计解决算法,在保证采集信息时效性保持在一定范围内的情况下,使总能耗最小。
[0201]
现对上述问题p1、p2和(p3)进行求解。首先解决(p1)问题,观察式(23)可以发现,每个无人机采样节点可以根据值来决定是否要在当前时隙进行业务b的采样。若在t时隙,节点没有采样新的数据,即则(p1)值为0,因此(p1)最小值应该小于等于0。对于任意无人机采样节点s,在t时隙,根据的值来决策是否采集业务b数据,算法如下:
[0202][0203]
如图4所示,在时隙t上的具体算法解析如下:
[0204]
(1)采样数量查看:查看无人机节点已采样业务数据包数量,若已到达上限kb,则不对此业务进行采样,查看下一项业务。
[0205]
(2)采样决策:计算的值,若值大于0,则此时隙不采样此业务数据包;否则若值小于0,则采样。
[0206]
(3)状态更新:更新以及已采样的业务数据包数量。
[0207]
接着解决(p2)问题,提出一种迭代贪心策略,在这个策略下,每个节点通过评估以下两点,来决定何时从哪一个相邻节点接收哪一个业务数据包:
[0208]
1、相邻节点向自身传输不同业务数据包对自身aoi产生的影响1、相邻节点向自身传输不同业务数据包对自身aoi产生的影响
[0209]
2、收发数据包产生的能量消耗每次考虑一个节点并尝试激活一条链路进行数据传输。链路与数据包业务类型的选择基于权重参数其值为式(24)乘积的右半部分,具体为:
[0210][0211]
其中表示j节点队列中由s节点采集的第k个b业务数据的生成时间,若节点队列中无此数据包,则值为0。
[0212]
算法在满足调度约束和fcfs约束的情况下进行链路激活与业务选择,在t时隙的传输调度与路由选择算法如下:
[0213][0214]
[0215]
如图5所示,在时隙t上的具体算法解析如下:
[0216]
(1)遍历链路权重:
[0217]
任选一节点,首先检查其通信状态,由于每个节点使用半双工模式,若节点已处于收/发状态,则跳过次节点,算法转移至下一节点。
[0218]
若节点处于空闲状态,则对于其通信范围内的所有节点,遍历他们b个业务数据队列,根据fcfs约束,取队列中的第一个数据包,并计算其权值存储所有权值并根据大小排序。
[0219]
(2)链路激活:
[0220]
满足以下全部三个条件的(i,j)链路可以在此时隙被激活传输:
[0221]
1、是所有权值中最小的。
[0222]
2、值小于0。
[0223]
3、j节点处于空闲状态。
[0224]
(3)状态更新:
[0225]
若有(i,j)链路被激活,则将i,j的状态更改为收/发。同时更新接收节点的aoi队列与两节点的业务数据队列。
[0226]
为了验证本发明提出的低能耗和高时效性的无人机网络数据采集与传输控制方法,分别采用了基于队列长度的背压算法(queue-length-based back-pressure,q-bp)和基于时延的背压算法(delay-based back-pressure,d-bp)与lea-sr性能做对比。
[0227]
其中,q-bp算法将节点间的队列长度差作为权值,d-bp算法将节点间队列中第一个数据包的时延差作为权值,基于权值最大的原则选择数据包以及下一跳节点。
[0228]
将q-bp、d-bp与lea-sr对比,比较了在不同时隙长度、最大队列长度、网络参数、采样节点数量等情况下,三种方案在总节点能耗和平均aoi上的性能差异。本发明具体仿真参数按表1所示进行设置。
[0229]
仿真参数如表1所示,在默认场景中,设置在以80m为半径的圆形区域内均匀随机分布20个无人机节点,并随机选取其中的5个作为感知节点,节点间的最远通信距离为30m,节点分布示意图如图6所示。
[0230]
系统运行在100个时隙内,业务种类设为3,最大平均aoi阈值设为12,李雅普诺夫优化网络参数设为50,每个节点最大数据队列长度为3。
[0231]
表1仿真参数表
[0232][0233]
图7为平均aoi阈值设为6,每个时隙时三种业务的节点平均aoi。前几个时隙是采样节点的启动时间,采样节点刚刚开始采样,没有向传输节点传输数据包,因此传输节点处的aoi均为0。启动时间过后,传输节点逐步接收到三种业务的采样数据包,三种业务的节点平均aoi首先快速上升,然后分别在1到4的区间内波动。详细数据如表2所示,业务1、2、3的平均aoi分别为2.12,、2.22、2.43,最大值在4
±
0.3的范围内浮动,标准差在0.9
±
0.08范围内浮动,可以看出所提策略不仅能够满足令所有业务的平均aoi都小于6的需求,其最大aoi的值也能满足,且浮动范围小,性能优秀且稳定。
[0234]
表2不同业务数据的aoi分析表
[0235]
业务类型平均aoi最大aoi标准差业务12.124.200.98业务22.223.730.83业务32.434.270.91
[0236]
图8和图9分别表示随着总时隙长度的变化,节点平均aoi和节点总能耗的变化情况。圆点线条表示使用本发明所提方案的情况,星号线条表示使用d-bp算法的情况,加号线条表示使用q-bp算法的情况。虚线线条和实线线条分别表示最大队列长度为3和6的情况。由于不同算法间aoi的差距过大,因此图8纵坐标取aoi的对数值。从图8中可以看出,随着总时隙长度的增加,平均aoi的值逐渐增加并趋于收敛,且最大队列长度越长,平均aoi的值趋于越大。从三种算法的性能对比来看:q-bp算法由于只考虑了队列长度差异,在aoi性能的表现上最差;d-bp考虑了队列中数据包的时延差异,因此在aoi性能上较q-bp有了较大提升,在最大队列长度为6,总时隙长度小于400的情况下,aoi性能略优于lea-sr,但从图8可见总能量消耗lea-sr性能更优,因此在都满足aoi性能的情况下,lea-sr更能顾及能耗性能,结合图9的能耗性能,其综合性能最佳。具体来说,以总时隙长度800为例,最大队列长度为3时,lea-sr的log(aoi)值相较q-bp算法减少77.5%,相较d-bp算法减少55.3%;最大队列长度为6时,lea-sr相较q-bp减少67.6%,相较d-bp算法减少38.7%。
[0237]
从aoi性能的收敛时间上看,lea-sr算法在300个时隙左右收敛,q-bp算法在600个时隙左右时候收敛,d-bp算法在800时隙仍未收敛。综上所述,lea-sr的收敛速度最快且收
敛值最小,性能最佳。
[0238]
图10表示采用本发明提供的采样和调度路由策略下,平均aoi随最大队列长度和采样节点数量的变化。从图中可以看出,当队列长度大于等于2时,最大队列长度越长,平均aoi的值越大,同时采样节点数量越多,平均aoi的值越小。具体来说,以最大队列长度为5为例,s=7比s=5情况下的aoi减小10.7%,s=9比s=7情况下的aoi减小10.6%,s=11比s=9情况下的aoi减小5.6%,s=15比s=11情况下的aoi减小7.2%,随着采样节点与传输节点比重的增加,采样节点的增加对aoi的影响逐渐减少。最大队列长度对aoi的影响是因为当队列长度等于1时,由于节点处缺少数据包储备,难以及时满足多跳传输需求,因此当队列长度增加为2时,缓解了多跳传输的压力,导致aoi略微减少;而当队列长度大于等于2时,队列中存储的数据包越多,被丢弃的旧数据包的数量就变少,存储的旧数据包就会相对较多,导致网络中数据的整体aoi上升。采样节点数量对aoi的影响是因为,采样节点越多一方面表示新鲜数据的来源越多,另一方面,传输节点与采样节点直接的传输机会增加,减少了数据包因传输路径长造成的时效性降低;当采样节点的数量超过传输节点时,aoi的变化出现了“饱和”现象,因此采样节点数量的继续增加对aoi的减少效果大幅减弱。
[0239]
图11表示采用本发明提供的采样和调度路由策略下,aoi和能耗随网络参数v的变化情况。图中左侧纵坐标表示aoi值大小,右侧纵坐标表示能耗值大小,圆点线条表示aoi的变化曲线,加号曲线表示能耗变化曲线。根据式(16)所示,参数v是作为调优参数来调整aoi性能与网络能耗之间的权衡。v值越大,系统越偏向于低能耗性能。从能耗曲线变化可以看出,lea-sr的能耗值随着v值的增大而减小,从式(23)、(24)可以看出,这是因为v值的增大阻止了采样数量和传输次数,从而降低了能量的消耗。从aoi曲线变化可以看出,lea-sr的aoi值随v值的增大先减小后增大,这是因为当v值增大时,抑制了采样节点的频繁采样,减少了采样数据在采样节点队列中的排队时长,从而降低了数据aoi,但是,随着v值继续增大,对采样和传输的抑制效果进一步增强,采样数据包数量不足和传输次数减少,导致数据更新速率减缓,从而使aoi上升。
[0240]
图12表示三种算法在总时长为50的时隙系统内,每个时隙中的时间复杂度曲线,详细数据如表3所示。结合图表可以看出,三种算法的时间复杂度首先快速增加,在一定时隙后收敛,这是因为算法启动导致时间复杂度迅速升高,一定时间后算法稳定,即时间复杂度在一定范围内波动。例如,本实施例提供的算法lea-sr的时间复杂度在6个时隙内到达最大值9.06
×
10-5
,随后快速下降,7时隙后基本在7
×
10-5
内波动,总体均值为6.658
×
10-5
。从平均值可以看出,lea-sr算法的平均时间复杂度最低,相比q-bp算法减少18.8%,比d-bp算法减少12%。从标准差可以看出,lea-sr算法的波动范围最小,稳定性最强,相比q-bp算法减少31%,比d-bp算法减少16.3%。从收敛时间来看,lea-sr与d-bp算法相近,相比q-bp算法减少36.4%。综上所述,lea-sr算法的时间复杂度在大小、稳定性和收敛时间方面的综合性能最佳,这是因为在计算调度权值时,q-bp需要遍历多个节点的所有队列以获取队列长度,增加了算法复杂度,且复杂度与队列中数据包数量有关,波动较大;而d-bp需要逐个查看本节点与周边节点每个数据队列中首个数据包的时延,并逐一相差对比;lea-sr舍弃了队列遍历以及逐一比对,直接从邻居节点信息计算权值,因此降低了算法的时间复杂度。
[0241]
表3不同算法的时间复杂度分析表
[0242]
算法最大值平均值标准差收敛时隙
q-bp9.95
×
10-5
8.20
×
10-5
1.64
×
10-5
11d-bp8.65
×
10-5
7.56
×
10-5
1.35
×
10-5
6lea-sr9.06
×
10-5
6.66
×
10-5
1.13
×
10-57[0243]
下面对本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制装置进行描述,下文描述的低能耗和高时效性的无人机网络数据采集与传输控制装置与上文描述的低能耗和高时效性的无人机网络数据采集与传输控制方法可相互对应参照。
[0244]
图13为本发明提供的低能耗和高时效性的无人机网络数据采集与传输控制装置的结构示意图。参照图13,本发明提供一种低能耗和高时效性的无人机网络数据采集与传输控制装置,可以包括:第一确定模块1310、第二确定模块1320、第三确定模块1330和第四确定模块1340。
[0245]
第一确定模块1310,用于基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
[0246]
第二确定模块1320,用于基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
[0247]
第三确定模块1330,用于基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0248]
第四确定模块1340,用于基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
[0249]
其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间基于总时隙个数和每个时隙对应的时间长度确定。
[0250]
在一些实施例中,所述装置还包括:
[0251]
第五确定模块,用于基于所述无人机采样节点在所述每个时隙内产生的数据包,确定所述无人机采样节点在每个时隙内消耗的能量和数据包aoi;
[0252]
第六确定模块,用于基于所述传输调度策略、所述路由策略、所述数据包aoi和无人机节点aoi,分别确定所述平均aoi、所述所有无人机节点在所述每个时隙内接收数据包消耗的能量,以及所述所有无人机节点在所述每个时隙内发送数据包消耗的能量;
[0253]
其中,所述数据包aoi为每个无人机节点中的每个数据包的aoi,所述无人机节点aoi为每个无人机节点中最新接收到的数据包的aoi。
[0254]
在一些实施例中,所述第三确定模块还用于:
[0255]
基于所述每个时隙内所有无人机节点的能耗,构建目标函数;
[0256]
基于所述李雅普诺夫优化理论,将所述目标约束条件转换为采样队列和aoi队列;
[0257]
基于所述采样队列和所述aoi队列的动态变化情况,在确定所述网络平均aoi小于aoi阈值的情况下,得到所述最小总能耗;
[0258]
所述目标约束条件基于所述无人机采样节点在所述每个时隙内对每种业务对应的数据包采样的平均次数、每个无人机节点中所述每种业务对应的数据包在所述每个时隙内的平均aoi、所述无人机节点在所述每个时隙内传输的数据包以及所述无人机节点在每
个时隙内选择的下一跳节点确定。
[0259]
在一些实施例中,所述目标函数通过下式表示:
[0260][0261]
其中,t为所述总时隙个数;
[0262][0263]
e(t)为t时隙内所有无人机节点的能量消耗;
[0264]
为所述无人机采样节点在所述t时隙内消耗的能量;
[0265]
为所有无人机节点在所述t时隙内接收数据包消耗的能量;
[0266]
为所有无人机节点在所述t时隙内发送数据包消耗的能量;
[0267]
是业务b的采样耗能系数,是业务b的接收耗能系数,是业务b的发送耗能系数,用于表示所述无人机采样节点s是否产生业务b的数据包,用于表示所述无人机节点在所述t时隙内是否选择传输由所述无人机采样节点s产生的业务b的数据包,y
ji
(t)用于表示在所述t时隙内无人机节点j是否将数据包传送到无人机节点i,y
ij
(t)用于表示在所述t时隙内无人机节点i是否将数据包传送到无人机节点j。
[0268]
在一些实施例中,所述目标约束条件为:
[0269][0270][0271][0272][0273][0274][0275][0276]
其中,用于表示所述无人机节点在所述t时隙内是否选择传输由无人机采样节点s产生的业务b的第k个数据包,用于表示第i个无人机节点中业务b对应的平均aoi,y
ni
(t)用于表示在t时隙无人机节点n是否发送数据包至无人机节点i,表示所述无人机节点总个数,表示所述无人机采样节点的总个数,表示业务数据的种类总数,kb表
示无人机采样节点在t个时隙内能采集的业务b的数据包的最大数量。
[0277]
图14示例了一种电子设备的实体结构示意图,如图14所示,该电子设备可以包括:处理器(processor)1410、通信接口(communications interface)1420、存储器(memory)1430和通信总线1440,其中,处理器1410,通信接口1420,存储器1430通过通信总线1440完成相互间的通信。处理器1410可以调用存储器1430中的逻辑指令,以执行低能耗和高时效性的无人机网络数据采集与传输控制方法,该方法包括:
[0278]
基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
[0279]
基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
[0280]
基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0281]
基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
[0282]
其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间基于总时隙个数和每个时隙对应的时间长度确定。
[0283]
此外,上述的存储器1430中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
[0284]
另一方面,本发明还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,计算机程序可存储在非暂态计算机可读存储介质上,所述计算机程序被处理器执行时,计算机能够执行上述各方法所提供的低能耗和高时效性的无人机网络数据采集与传输控制方法,该方法包括:
[0285]
基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
[0286]
基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
[0287]
基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0288]
基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时
隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
[0289]
其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间基于总时隙个数和每个时隙对应的时间长度确定。
[0290]
又一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各方法提供的低能耗和高时效性的无人机网络数据采集与传输控制方法,该方法包括:
[0291]
基于无人机采样节点在每个时隙内消耗的能量、所有无人机节点在所述每个时隙内接收数据包消耗的能量和所有无人机节点在所述每个时隙内发送数据包消耗的能量,确定所述每个时隙内所有无人机节点的能耗;
[0292]
基于所述每个时隙内所有无人机节点的aoi,确定总时间内所有无人机节点对应的网络平均aoi;
[0293]
基于李雅普诺夫优化理论,将所述每个时隙内所有无人机节点的能耗以及所述网络平均aoi对应的目标约束条件进行转化,在确定所述网络平均aoi小于aoi阈值的情况下,得到最小平均能耗;
[0294]
基于所述网络平均aoi和所述最小平均能耗,确定所述无人机采样节点在所述时隙内的采样策略和所有无人机节点在所述每个时隙内的传输调度策略和路由策略;
[0295]
其中,所述无人机节点包括所述无人机采样节点和无人机传输节点,所述总时间基于总时隙个数和每个时隙对应的时间长度确定。
[0296]
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
[0297]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
[0298]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1