一种无携带设备的目标室内轨迹追踪方法
1.本发明涉及室内定位技术,具体是一种无携带设备的目标室内轨迹追踪方法。
背景技术:
2.无线定位技术在现在生活逐渐智能化的过程中,应用越来越广泛,例如:家庭或医院中的医疗保健;对消防员和火灾幸存者的位置检测;对人员的位置预测等。然而,在一些紧急情况发生的时候,定位目标不一定会携带能发射无线电的设备,因此,需要基于无线网络研究dfl(device free location,简称dfl)。生活当中,无论我们身在何处,都会有一些无线信号不可避免地穿透我们的身体,这就为dfl提供了可行性,与传统的基于设备/主动跟踪方法不同,利用接收信号强度指示器(rssi)度量的无设备定位(dfl)系统可以跟踪未标记的对象,它们可以促进基于位置的服务,如灯光控制和入侵者检测。
3.在实际的dfl应用中,为了扩大监测范围和提高定位精度,需要部署过多的节点,这些传感器节点会接收到大量的高维dfl数据,为了解决这一问题,将dfl看作一个基于稀疏表示的分类问题,用得到的大量高维数据建立稀疏模型,可以有效的处理高维数据并进行分类进而实现定位,提高无设备定位的效率。
4.基于稀疏表示分类src(sparse-representation-based classification,简称src)进行定位是机器学习中的分类问题和压缩感知相结合的结果,但是,src对于具有相同方向的数据不能很好的处理,因为正则化后具有相同方向的数据会互相重叠,所以不能从本质上区分它们,这就导致了src在这类情况下作用不明显,因此src不适用于具有相同方向的不同类数据,即使它们线性可分。为了解决src的这个问题,引入核变换建立核稀疏表示分类器ksrc(kernel sparse-representation-based classification,简称ksrc)。基于ksrc进行定位即把机器学习中的核函数与核方法和稀疏表示相结合,是src的非线性扩展,将线性优化问题经过核变换之后转换为新的优化问题,通过解决这个优化问题得到定位结果。
技术实现要素:
5.本发明的目的是正对现有技术的不足,而提供一种无携带设备的目标室内轨迹追踪方法。这种方法能对目标位置进行有效的监测,能提高目标轨迹追踪及定位的准确率。
6.实现本发明目的的技术方案是:
7.一种无携带设备的目标室内轨迹追踪方法,包括如下步骤:
8.1)采集训练样本集:依据目标对无线电遮挡的原理采集目标位于各个位置的信号数据及对应的标签,构成训练样本集,具体为:
9.1-1)将监控区域划分为n个相同大小的网格,每个网格都代表目标可能所处的位置,且每个网格都有一个对应的类标为y∈{1,2,
…
,n};
10.1-2)在需要定位的定位区域周围设置均匀分布的l个固定的无线电接收传感器,每次由其中的一个传感器作为发射传感器,l-1个传感器作为接收传感器,每个发射传感器
和一个接收传感器之间的无线通信为一组无线通信链路,则定位区域中共有n=l
×
(l-1)组无线通信链路;
11.1-3)收集目标位于各个网格时的数据作为训练集,当目标位于其中一个网格时,一个发射传感器发射无线电波信号,其他l-1个接收传感器接收信号,接收的信号数据是接收信号的强度,即对接收信号在频域中的基波与二次谐波进行处理,记录此时的数据,其中每个接收天线同时接收数据;
12.1-4)轮换l个传感器分别作为发射传感器,其它传感器为接收传感器,当轮换完一轮后,即记录完目标在此网格中的完整数据;
13.2)采集测试样本:采集目标当前实时所处位置的数据及标签构成一组测试样本,具体为:
14.2-1)对目标当前实时位置数据进行实时采集,其中一个传感器发射载波信号,其它传感器接收信号处理成信号强度数据;
15.2-2)记录目标位于网格的类标;
16.3)构成字典矩阵:首先将采集到的训练样本集数据及测试样本数据处理成矩阵,并对此矩阵中的列向量核变换处理,使数据线性可分度提高的同时增加准确率,再采用主成分分析方法对核变换后的高维数据投影降维,降低计算难度,最后对处理完的训练样本集中的每个位置的数据处理成列向量,拼接在一起构成字典矩阵,具体为:
17.3-1)将目标在每个位置收集的数据转化为列向量,每个位置都有对应的列向量以及标签,即每个列向量都代表一个位置的数据信息,并且对每个列向量进行二范数归一化处理;
18.3-2)对归一化后的列向量采用高斯核函数做核变换,这样维数提高且更为线性可分,核变换包括对训练集x和测试集x做核变换,具体方式为:
19.测试集:
20.训练集:
21.高斯核函数定义为:
22.核变换后的目标方程如公式(4)所示:
[0023][0024]
其中α为所求稀疏向量,ε为α的稀疏度;
[0025]
3-3)核变换后的数据虽然分类准确率提高,但是由于维度过高,计算困难,因此采用主成分分析对核空间数据进行投影,从而达到降低维度的目的,采用主成分分析对核空间数据进行投影,对数据投影降维的方式如公式(5)所示::
[0026]
‖ptφ(x)-ptφα‖2ꢀꢀ
(5),
[0027]
其中p是投影矩阵,且p=φb,b=[β1,
…
βd]为伪转换矩阵,
[0028]
将公式(5)代入目标方程公式(1)、(2)、(3)得到新的目标方程如公式(6)所示:
[0029]
[0030]
采用主成分分析对公式(6)中的矩阵b求解,即目标方程只存在一个未知值α,主成分分析求解b过程为:
[0031]
nλβ=kβ,
[0032]
其中,n为训练集样本数量,即求k的特征值和特征矩阵,取前d个最大特征值对应特征向量并且进行列归一化构成矩阵b,即求出了伪转换矩阵b;
[0033]
4)得到位置类标:构建目标方程并进行求解得到稀疏向量,分析此目标方程得到此测试样本对应的位置标签,即对测试样本对应的目标方程公式(6)求解,求出稀疏向量α=(0,0,0,
…
αj,
…
,0),取稀疏向量的最大值,最大值位置对应的标签即为目标在此时刻的实时位置标签;
[0034]
5)得到目标当前移动轨迹:不断记录得到的测试样本分类类标,并将当前记录的位置类标对应的位置连点成线,即为目标当前移动轨迹,包括:
[0035]
5-1)将位置类标按照顺序记录在位置向量loc=(l1,l2,...,ln)中;
[0036]
5-2)按照位置向量loc中的所存储的类标对应的网格位置点,连点成线,得到当前目标移动轨迹,并且此数组中的最后一项即为目标的实时位置对应类标,重复步骤2)—步骤5),在定位时间结束后,即可画出目标的完整移动轨迹。
[0037]
本技术方案将机器学习中的核函数与稀疏表示结合起来,对训练集和测试集都做核变换,使数据更为线性可分,提高了非线性数据的定位准确率,并且在核变换之后引入主成分分析,降低了核变换之后的维数且不影响核变换之后的定位准确率,简化了计算,降低了计算难度,便于快速求解,降维之后再用稀疏编码的方法求解目标方程,能够对目标室内位置进行有效预测,大大提高准确率,并且可以实现实时定位以及目标移动轨迹追踪,为银行防盗,火灾救援等一些无携带设备定位的场景提供技术基础。
[0038]
这种方法能对目标位置进行有效的监测,能提高目标轨迹追踪及定位的准确率。
附图说明
[0039]
图1为实施例中目标位于其中一个网格点的实时定位传感器结构示意图;
[0040]
图2为实施例中追踪当前时间内目标移动轨迹的传感器网格的结构示意图;
[0041]
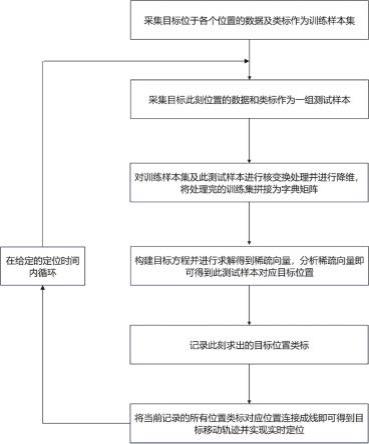
图3为实施例的方法流程示意图。
具体实施方式
[0042]
下面结合附图和实施例对本发明的内容做进一步的阐述,但不是对本发明的限定。
[0043]
实施例:
[0044]
参照图3,一种无携带设备的目标室内轨迹追踪方法,包括如下步骤:
[0045]
1)采集训练样本集:依据目标对无线电遮挡的原理采集目标位于各个位置的信号数据及对应的标签,构成训练样本集,具体为:
[0046]
1-1)将监控区域划分为n个相同大小的网格,每个网格都代表目标可能所处的位置,且每个网格都有一个对应的类标为y∈{1,2,
…
,n};
[0047]
1-2)在需要定位的定位区域周围设置均匀分布的l个固定的无线电接收传感器,每次由其中的一个传感器作为发射传感器,l-1个传感器作为接收传感器,每个发射传感器
和一个接收传感器之间的无线通信为一组无线通信链路,则定位区域中共有n=l
×
(l-1)组无线通信链路;
[0048]
1-3)收集目标位于各个网格时的数据作为训练集,当目标位于其中一个网格时,一个发射传感器发射无线电波信号,其他l-1个接收传感器接收信号,接收的信号数据是接收信号的强度,即对接收信号在频域中的基波与二次谐波进行处理,记录此时的数据,其中每个接收天线同时接收数据;
[0049]
1-4)轮换l个传感器分别作为发射传感器,其它传感器为接收传感器,当轮换完一轮后,即记录完目标在此网格中的完整数据;
[0050]
2)采集测试样本:采集目标当前实时所处位置的数据及标签构成一组测试样本,具体为:
[0051]
2-1)对目标当前实时位置数据进行实时采集,其中一个传感器发射载波信号,其它传感器接收信号处理成信号强度数据;
[0052]
2-2)记录目标位于网格的类标;
[0053]
3)构成字典矩阵:首先将采集到的训练样本集数据及测试样本数据处理成矩阵,并对此矩阵中的列向量核变换处理,使数据线性可分度提高的同时增加准确率,再采用主成分分析方法对核变换后的高维数据投影降维,降低计算难度,最后对处理完的训练样本集中的每个位置的数据处理成列向量,拼接在一起构成字典矩阵,具体为:
[0054]
3-1)将目标在每个位置收集的数据转化为列向量,每个位置都有对应的列向量以及标签,即每个列向量都代表一个位置的数据信息,并且对每个列向量进行二范数归一化处理;
[0055]
3-2)对归一化后的列向量采用高斯核函数做核变换,这样维数提高且更为线性可分,核变换包括对训练集x和测试集x做核变换,具体方式为:
[0056]
测试集:
[0057]
训练集:
[0058]
高斯核函数定义为:
[0059]
核变换后的目标方程如公式(4)所示:
[0060][0061]
其中α为所求稀疏向量,ε为α的稀疏度;
[0062]
3-3)核变换后的数据虽然分类准确率提高,但是由于维度过高,计算困难,因此采用主成分分析对核空间数据进行投影,从而达到降低维度的目的,采用主成分分析对核空间数据进行投影,对数据投影降维的方式如公式(5)所示::
[0063]
‖ptφ(x)-ptφα‖2ꢀꢀ
(5),
[0064]
其中p是投影矩阵,且p=φb,b=[β1,
…
βd]为伪转换矩阵,
[0065]
将公式(5)代入目标方程公式(1)、(2)、(3)得到新的目标方程如公式(6)所示:
[0066]
[0067]
采用主成分分析对公式(6)中的矩阵b求解,即目标方程只存在一个未知值α,主成分分析求解b过程为:
[0068]
nλβ=kβ,
[0069]
其中,n为训练集样本数量,即求k的特征值和特征矩阵,取前d个最大特征值对应特征向量并且进行列归一化构成矩阵b,即求出了伪转换矩阵b;
[0070]
4)得到位置类标:构建目标方程并进行求解得到稀疏向量,分析此目标方程得到此测试样本对应的位置标签,即对测试样本对应的目标方程公式(6)求解,求出稀疏向量α=(0,0,0,
…
αj,
…
,0),取稀疏向量的最大值,最大值位置对应的标签即为目标在此时刻的实时位置标签;
[0071]
5)得到目标当前移动轨迹:不断记录得到的测试样本分类类标,并将当前记录的位置类标对应的位置连点成线,即为目标当前移动轨迹,包括:
[0072]
5-1)将位置类标按照顺序记录在位置向量loc=(l1,l2,...,ln)中;
[0073]
5-2)按照当前位置向量loc中的所存储的类标对应的网格位置点,连点成线,得到当前目标移动轨迹,并且此数组中的最后一项即为目标的实时位置对应类标,重复步骤2)—步骤5),在定位时间结束后,即可画出目标的完整移动轨迹。
[0074]
具体地:
[0075]
如图1、图2所示,本例首先对室内定位环境进行了建模,在定位区域周围布置l个传感器,每次都由其中一个发射,另外l-1个传感器接收,由于采集到的数据可能存在线性不可分的情况,因此,首先用核变换对数据进行处理,再用投影的方式对核空间进行降维,对于降维后的数据采取稀疏编码的方式求解稀疏向量,通过对多个稀疏向量的分析实现对目标的实时定位及移动轨迹的追踪,
[0076]
如图2所示:
[0077]
s101依据目标对无线电遮挡的原理采集目标位于各个位置的信号数据及对应的标签,构成训练样本集,包括:
[0078]
s1011将监控区域划分为n个相同大小的网格,每个网格都代表目标可能所处的位置,且每个网格都有一个对应的类标为y∈{1,2,
…
,n};
[0079]
s1012在需要定位的定位区域周围布置均匀分布的l个固定的无线电接收传感器,每次由其中的一个传感器作为发射传感器,l-1个传感器作为接收传感器,每个发射传感器和一个接收传感器之间的无线通信为一组无线通信链路,因此定位区域中共有n=l
×
(l-1)组链路;
[0080]
s1013收集目标位于各个网格时的数据作为训练集,当目标位于其中一个网格时,一个发射传感器发射无线电波信号,其他l-1个接收传感器接收信号,接收的信号数据是接收信号的强度,即对接收信号在频域中的基波与二次谐波进行处理,记录此时的数据,其中每个接收天线同时接收数据;
[0081]
s1014轮换l个传感器分别作为发射传感器,其他传感器为接收传感器,当轮换完一轮后,即记录完目标在此网格中的完整数据;
[0082]
s102采集目标当前实时所处位置的数据及标签构成一组测试样本,包括:
[0083]
s1021对目标的此刻位置数据进行实时采集,其中一个传感器发射载波信号,其他传感器接收信号处理成信号强度数据;
[0084]
s1022记录目标位于网格的类标;
[0085]
s103首先将采集到的训练样本集数据及测试样本数据处理成矩阵,再对此矩阵中的列向量核变换处理,使数据线性可分度提高的同时增加准确率,再用主成分分析方法对核变换后的高维数据投影降维,降低计算难度,最后对这样处理完的训练样本集中的每个位置的数据处理成列向量,拼接在一起构成字典矩阵,包括:
[0086]
s1031对训练集与测试集做核变换:
[0087]
测试集:
[0088]
训练集:
[0089]
高斯核函数定义为:
[0090]
核变换后的目标方程为:
[0091][0092]
s1032对数据投影降维的具体方式是:
[0093]
‖ptφ(x)-ptφα‖2,
[0094]
其中p是投影矩阵,且p=φb,b=[β1,
…
βd]为伪转换矩阵;
[0095]
s1033将步骤s1032中的公式代入步骤s1031中得到新的目标方程:
[0096][0097]
s1034用主成分分析对其中的矩阵b求解,即目标方程只存在一个未知值α;
[0098]
s104构建目标方程并进行求解得到稀疏向量,分析此目标方程得到此测试样本对应的位置标签:对此测试样本对应的目标方程求解,求出稀疏向量α=(0,0,0,
…
αj,
…
,0),取稀疏向量的最大值,最大值位置对应的标签即为目标在此时刻的实时位置标签;
[0099]
s105不断记录求出的测试样本分类类标,并将当前记录的位置类标对应的位置连点成线,即为目标当前移动轨迹,包括:
[0100]
s1051将位置类标按照顺序记录在位置向量loc=(l1,l2,...,ln);
[0101]
s1052按照位置向量loc中的所存储的类标对应的网格位置点,连点成线,得到当前目标移动轨迹,并且此数组中的最后一项即为目标的实时位置对应类标;
[0102]
s106在需要定位的时间内,不断重复步骤s102-s105,当定位时间结束时可获得目标的完整移动轨迹且在定位时间内可以实现目标实时定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1