一种基于前景理论框架的边缘计算任务卸载方法
1.本发明属于物联网领域,具体涉及一种前景理论框架的边缘计算任务卸载方法。
背景技术:
2.近年来,随着信息技术和计算机技术的高速发展,各种移动设备不断更新换代,网络可以为人们提供丰富的应用。传统的集中式网络架构由于链路拥挤,导致通信时延较长,无法满足用户的使用体验(qoe,quality of experience),所以研究人员提出了将网络能力从核心网络迁移到边缘,即移动边缘计算(mec,mobile edge computing)。通过在移动网络边缘部署mec服务器,mec可以提供接近移动设备用户的计算和存储资源。因此,可以通过将计算转移到边缘云中附近的mec服务器来实现低延迟。2014年,欧洲电信协会将mec定义为在移动网络边缘提供it(information technology)服务环境和云计算能力,根据mec具有与用户在地理位置上的靠近、低延迟、局域性和位置感知等特点,强调mec贴近移动用户,减少网络的运营和服务延迟的特性,从而改善用户体验。mec服务器部署在无线网络的边缘,缩短了计算服务器与车辆的距离,使车辆可以将计算任务卸载至mec服务器进行计算,并且汽车工业的发展使得车辆的计算能力有了不小的提升,这样车辆的计算任务既可以卸载到服务器进行计算,也可以卸载到其他空闲车辆上进行计算,所以mec的出现使得智能交通快速发展,并且使得联网车辆的数量也在快速增加。随着车辆远程信息技术的发展,人们对于车辆网络上的功能的期待也随之增加,如驾驶安全、自动驾驶、车内娱乐以及智能交通系统;这些愿景也使得车辆网络的预期数据变得更为庞大。
3.大量的研究人员开发了很多提升卸载效率或者提升用户体验的计算任务卸载算法,但是却忽略了各种卸载方案都是基于用户在选择卸载方式时的绝对理性,但是在不确定的情况下,人的决策依赖于其主观感知,可能会严重偏离理性,如实验所述。对于现实中网络连接和网络设备的极大不确定性,人的主观感知将会在做出卸载决策的过程中起到很大的作用,所以用户会按照自己的期望来选择卸载任务或是在边缘设备上执行,计算卸载算法所推断出的卸载策略参考性将会收到影响。
技术实现要素:
4.本发明的目的是就是将移动端的处理不了的或处理不好的任务卸载到移动网络的边缘上的边缘服务器,当边缘服务器将任务计算完毕后再将结果传输回移动端。为了研究人的主观感知对计算卸载产生的影响,应用前景理论(pt,prospect theory)来模拟用户在卸载过程中的真实行为。具体来说,本发明将计算卸载场景模拟为车辆在城市中与边缘服务器的交互,将其建模为多用户多边缘服务器模型,考虑每个用户的真实行为的同时限制时间,并最小化任务执行的能耗,最大化主观效用。根据前景理论对人工鱼群算法进行改进,提出一种改进的人工鱼群算法来保证解的全局最优性同时最小化收敛速度。
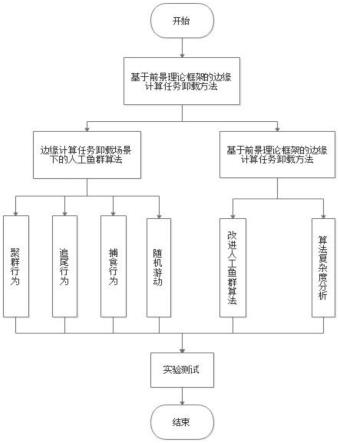
5.本发明的前景理论框架的边缘计算任务卸载方法,主要包括如下关键步骤:
6.第1、边缘计算任务卸载场景下的人工鱼群算法实现:
7.第1.1、聚群行为;
8.第1.2、追尾行为;
9.第1.3、捕食行为;
10.第1.4、随机游动;
11.第2、基于前景理论框架的边缘计算任务卸载方法的设计:
12.第2.1、改进人工鱼群算法;
13.第2.2、算法复杂度分析。
14.进一步的,步骤第1.1中实现了鱼群聚群行为策略,输入当前人工鱼位置xn、vision、step和crowd,尝试try_num次聚群,聚群行为若超过规定尝试次数还未能找到更优的聚群位置,则代表当前人工鱼所处位置已经是较为合适的位置,从而执行捕食行为,若是找到合适聚群的位置,则按照公式(2)向鱼群中心位置前进一步,
15.x
center
=x
sum
/nfꢀꢀ
(1)
[0016][0017]
其中,x
sum
为人工鱼群的位置累加值,x
next
为人工鱼移动后的位置,rand(0,1)为0~1之间的随机数,floor为向下取整函数,floor的引入保证了每个决策都是整数,保证了中问题的可解性,
[0018]
首先进行参数初始化,当前人工鱼位置xn,当前人工鱼的适应度值为fitness_cur,尝试聚群次数try_num,当满足最大尝试聚群次数时,终止优化返回结果,否则继续优化,然后计算当前人工鱼视野范围内的伙伴数量,计算当前人工鱼视野范围内的伙伴中心,断当前人工鱼视野范围内的伙伴中心位置适应度及拥挤度条件则向当前人工鱼视野范围内的伙伴中心前进一步,录聚群行为的当前最优适应度值不满足条件则进行捕食行为,后返回继续进行迭代。
[0019]
进一步的,步骤第1.2中输入当前人工鱼位置xn,step,vision和crowd,尝试try_num次追尾,通过公式(3)找到营养物质浓度最高同类的位置,若该位置满足公式(4),则当前人工鱼向满足条件的同类按照公式(5)进行追尾,否则会进行捕食行为,其中xk为当前人工鱼视野范围内第k条同类的位置,
[0020]
x
min
=arg min(fitness(xk))
ꢀꢀ
(3)
[0021]
fitness(x
min
)/nf<fitness(xn)
·
crowd
ꢀꢀ
(4)
[0022][0023]
首先进行参数初始化,当前人工鱼的适应度值fitness_cur,尝试追尾次数try_num等,满足最大尝试聚群次数时,终止优化返回结果,则继续优化,后计算当前人工鱼视野范围内的伙伴数量,到视野范围内第k条人工鱼的位置,计算第k条人工鱼位置的适应度值,全部计算完毕后进行比较得到最小适应度值的位置x
min
,断x
min
处是否适应度值足够低并且不拥挤,满足条件泽继续执行,否则进行捕食行为,最小适应度值的位置x
min
前进一步,后记录追尾行为的当前最优适应度值,返回继续进行迭代。
[0024]
进一步的,步骤第1.3中人工鱼会向离当前位置vision范围内的区域寻找下一移动位置,若该位置营养物质浓度高于起始位置,则向该位置移动一步,否则重新搜寻,在尝试次数内未能找到更好位置则执行随机游动行为,
[0025]
首先进行参数的初始化,当前人工鱼的适应度值fitness_cur,尝试捕食次数try_num等,满足最大尝试捕食次数时,终止优化返回结果,否则继续优化,然后在视野范围内随机选择一个位置,向该位置移动,判断移动后的适应度值是否小于fitness_cur,若小于则fitness_cur改变为移动后的适应度值,否则进行重新获取随机位置。
[0026]
进一步的,步骤第1.4中人工鱼会在当前位置vision范围内的区域随机搜寻一个位置并按照公式(6)向该位置进行移动,
[0027]
x
next
=x
next
+floor(rand(0,1)
·
step)
ꢀꢀ
(6)
[0028]
小世界网络下的人工鱼群算法使得人工鱼在只有部分信息的情况下,通过较短路径得到其他人工鱼所在位置的营养物质浓度,有效定位高资源区,从而使算法更快的收敛。
[0029]
进一步的,步骤第2.1中为了增强人工鱼群算法的寻优能力,对标准人工鱼群算法中的觅食函数、聚群函数和追尾函数进行改进,限定人工鱼的搜索范围,使其远离局部极值,向最优位置靠近,引入当前最优适应度阈值限定策略,
[0030]
1)对觅食函数的改进,试try_num次后,如果其状态值小于当前鱼群最优适应度值的1/n,则执行随机游动函数,否则保持当前状态以避免人工鱼离开其最优位置;
[0031]
2)对聚群函数的改进,只有当人工鱼搜寻到中心位置处的适应度值大于最优适应度值的1/n时,它才向某一方向游动,否则执行觅食函数,以保证其不会陷入较小局部极值点附近;
[0032]
3)对追尾函数的改进,与聚群函数改进类似,只有当人工鱼搜索到鱼群中适应度值大于当前最优适应度值的1/n时,它才继续向某一方向游动,否则执行觅食函数;
[0033]
改进算法的代码大体上与人工鱼群算法一致,但是需要在算法中加入记录全局最优适应度值的变量,并且更新最优适应度值时需要满足公式(7),其中fitness_global为全局最优适应度值,因为改动大体相同,所以不再赘述,使用捕食行为作为例子进行说明,
[0034]
fitness(prey)<fitness_global
ꢀꢀ
(7)
[0035]
首先进行鱼群的初始化之后对整个鱼群迭代gen_times次,在每次迭代中,每条人工鱼都会进行觅食、聚群和追尾的行为,之后根据适应度函数,计算出进行相应行为之后所在水域的营养物质浓度,最后比较三种行为的适应度值,得到最优适应度值fitness_best,人工鱼计算卸载算法afsa(artificial fish swarm algorithm)首先要初始化车辆初始位置xn,车辆移动步长step,车辆可侦察视野vision,迭代搜索次数max_gen,当满足卸载要求或达到最大迭代次数时,终止优化返回结果,否则继续执行,然后计算每一辆车的最优适应度值,调用子算法实现人工鱼的捕食行为,移动到视野内更好的计算任务卸载位置,调用子算法实现人工鱼的聚群行为,向更好的计算任务卸载位置移动,调用子算法实现人工鱼的追尾行为,向更好的计算任务卸载位置移动,比较人工鱼进行三种行为之后的适应度值,其中最小适应度值记为最优适应度值,并记录当前位置为卸载最有位置,返回进行下一条鱼的最优适应度计算,迭代计数器加一并返回继续进行迭代,
[0036]
fitness_best=min{fitness_prey,fitness_swarm,fitness_follow}
ꢀꢀ
(8)。
[0037]
进一步的,步骤第2.2中算法的复杂度通常表示为一个函数,该函数的定义域为输入数据的规模,函数值的范围为执行步骤的数量,即时间复杂度,或需要的存储空间,即空间复杂度,时间复杂度是解决问题所需要的时间,通常通过计算部署来度量,设总迭代次数为m,人工鱼数量为f,觅食、聚群、追尾算法的尝试次数为t,
[0038]
因为afsa算法执行过程会执行若干次迭代,且每次迭代会调用若干次觅食、聚群和追尾算法,所以算法的时间复杂度为:
[0039]
o(m*f*(o(t)+o(t)+o(t)))≈o(m*f*t)
ꢀꢀ
(9)
[0040]
afsa算法中需要储存的变量为人工鱼群的位置及最优适应度值及其他辅助变量,而人工鱼群位置和人工鱼数量成正比,最优适应度值和总迭代次数成正比,所以本算法的空间复杂度为:
[0041]
o(m*f)
ꢀꢀ
(10)。
[0042]
本发明的优点和积极效果是:
[0043]
本发明提出了mec小蜂窝网络与前景理论框架相结合的移动用户任务卸载问题的解决方法,将用户的真实选择进行建模,在小蜂窝网络的背景下,应用改进的人工鱼群算法在反映用户真实选择的情况下,最小化整个网络的能量消耗,同时验证了该方法的时间及空间复杂度都可以接受。实验结果表明了方案的有效性,并且和一般启发式算法相比,在真实情况下,算法更适用且效果较好。在多用户多mec服务器场景中,还需要进一步考虑延迟和能耗共同优化方案。
附图说明
[0044]
图1是移动边缘计算。
[0045]
图2是系统模型。
[0046]
图3是各算法的适应度值变化。
[0047]
图4是卸载可能性对于适应度值的影响。
[0048]
图5是风险厌恶β和失败惩罚λ的影响。
[0049]
图6是人工鱼视野vision和拥挤度crowd对结果的影响。
[0050]
图7是尝试次数try_num对适应度值的影响。
[0051]
图8是额外惩罚di对适应度值的影响。
[0052]
图9是真实实验场景。
[0053]
图10是应用前景框架车辆数量对平均适应度的影响。
[0054]
图11是不应用前景框架车辆数量对平均适应度的影响。
[0055]
图12是应用前景框架适应度值变化图。
[0056]
图13是不应用前景框架适应度值变化图。
[0057]
图14是基于前景理论框架的边缘计算任务卸载方法流程图。
具体实施方式
[0058]
在本发明中,提出了mec小蜂窝网络与前景理论框架相结合的移动用户任务卸载问题的解决方法,将用户的真实选择进行建模,在小蜂窝网络的背景下,应用改进的人工鱼群算法在反映用户真实选择的情况下,最小化整个网络的能量消耗,同时验证了该方法的时间及空间复杂度都可以接受。实验结果表明了方案的有效性,并且和一般启发式算法相比,在真实情况下,算法更适用且效果较好。在多用户多mec服务器场景中,还需要进一步考虑延迟和能耗共同优化方案。
[0059]
参见附图14,本实施例为一种基于前景理论框架的边缘计算任务卸载方法,其特
征在于该方法主要包括如下步骤:
[0060]
第1、边缘计算任务卸载场景下的人工鱼群算法实现:
[0061]
第1.1、聚群行为;
[0062]
第1.2、追尾行为;
[0063]
第1.3、捕食行为;
[0064]
第1.4、随机游动;
[0065]
第2、基于前景理论框架的边缘计算任务卸载方法的设计:
[0066]
第2.1、改进人工鱼群算法;
[0067]
第2.2、算法复杂度分析。
[0068]
本发明步骤第1.1中实现了鱼群聚群行为策略,输入当前人工鱼位置xn、vision、step和crowd,尝试try_hum次聚群,聚群行为若超过规定尝试次数还未能找到更优的聚群位置,则代表当前人工鱼所处位置已经是较为合适的位置,从而执行捕食行为,若是找到合适聚群的位置,则按照公式(2)向鱼群中心位置前进一步,
[0069]
x
center
=x
sum
/nfꢀꢀ
(1)
[0070][0071]
其中,x
sum
为周围同类的中心位置,x
sum
为人工鱼群的位置累加值,x
next
为人工鱼移动后的位置,rand(0,1)为0~1之间的随机数,floor为向下取整函数,floor的引入保证了每个决策都是整数,保证了问题的可解性,
[0072]
首先进行参数初始化,当前人工鱼位置xn,当前人工鱼的适应度值为fitness_cur,尝试聚群次数try_num,当满足最大尝试聚群次数时,终止优化返回结果,否则继续优化,然后计算当前人工鱼视野范围内的伙伴数量,计算当前人工鱼视野范围内的伙伴中心,断当前人工鱼视野范围内的伙伴中心位置适应度及拥挤度条件则向当前人工鱼视野范围内的伙伴中心前进一步,录聚群行为的当前最优适应度值不满足条件则进行捕食行为,后返回继续进行迭代。
[0073]
本发明步骤第1.2中输入当前人工鱼位置xn,step,vision和crowd,尝试try_num次追尾,通过公式(3)找到营养物质浓度最高同类的位置,若该位置满足公式(4),则当前人工鱼向满足条件的同类按照公式(5)进行追尾,否则会进行捕食行为,其中xk为当前人工鱼视野范围内第k条同类的位置,
[0074]
x
min
=arg min(fitness(xk))
ꢀꢀ
(3)
[0075]
fitness(x
min
)/nf<fitness(xn)
·
crowd
ꢀꢀ
(4)
[0076][0077]
其中,fitness_cur为当前人工鱼的适应度值,try_hum为当前人工鱼尝试追尾次数,x
min
为人工鱼的最小适应度值,xn、step、vision和crowd为输入当前人工鱼位置,x
next
为人工鱼移动后的位置,floor为向下取整函数,rand(0,1)为0~1之间的随机数,
[0078]
首先进行参数初始化,当前人工鱼的适应度值fitness_cur,尝试追尾次数try_num等,满足最大尝试聚群次数时,终止优化返回结果,则继续优化,后计算当前人工鱼视野范围内的伙伴数量,到视野范围内第k条人工鱼的位置,计算第k条人工鱼位置的适应度值,全部计算完毕后进行比较得到最小适应度值的位置x
min
,断x
min
处是否适应度值足够低并且
不拥挤,满足条件泽继续执行,否则进行捕食行为,最小适应度值的位置x
min
前进一步,后记录追尾行为的当前最优适应度值,返回继续进行迭代。
[0079]
本发明步骤第1.3中人工鱼会向离当前位置vision范围内的区域寻找下一移动位置,若该位置营养物质浓度高于起始位置,则向该位置移动一步,否则重新搜寻,在尝试次数内未能找到更好位置则执行随机游动行为,
[0080]
首先进行参数的初始化,当前人工鱼的适应度值fitness_cur,尝试捕食次数try_num等,满足最大尝试捕食次数时,终止优化返回结果,否则继续优化,然后在视野范围内随机选择一个位置,向该位置移动,判断移动后的适应度值是否小于fitness_cur,若小于则fitness_cur改变为移动后的适应度值,否则进行重新获取随机位置。
[0081]
本发明步骤第1.4中人工鱼会在当前位置vision范围内的区域随机搜寻一个位置并按照公式(6)向该位置进行移动,
[0082]
x
next
=x
next
+floor(rand(0,1)
·
step)
ꢀꢀꢀꢀ
(6)
[0083]
其中,x
next
为人工鱼移动后的位置,floor为向下取整函数,rand(0,1)为0~1之间的随机数,step为输入当前人工鱼位置,
[0084]
小世界网络下的人工鱼群算法使得人工鱼在只有部分信息的情况下,通过较短路径得到其他人工鱼所在位置的营养物质浓度,有效定位高资源区,从而使算法更快的收敛。
[0085]
本发明步骤第2.1中为了增强人工鱼群算法的寻优能力,对标准人工鱼群算法中的觅食函数、聚群函数和追尾函数进行改进,限定人工鱼的搜索范围,使其远离局部极值,向最优位置靠近,引入当前最优适应度阈值限定策略,
[0086]
1)对觅食函数的改进,试try_num次后,如果其状态值小于当前鱼群最优适应度值的1/n,则执行随机游动函数,否则保持当前状态以避免人工鱼离开其最优位置;
[0087]
2)对聚群函数的改进,只有当人工鱼搜寻到中心位置处的适应度值大于最优适应度值的1/n时,它才向某一方向游动,否则执行觅食函数,以保证其不会陷入较小局部极值点附近;
[0088]
3)对追尾函数的改进,与聚群函数改进类似,只有当人工鱼搜索到鱼群中适应度值大于当前最优适应度值的1/n时,它才继续向某一方向游动,否则执行觅食函数;
[0089]
改进算法的代码大体上与人工鱼群算法一致,但是需要在算法中加入记录全局最优适应度值的变量,并且更新最优适应度值时需要满足公式(7),其中fitness_global为全局最优适应度值,因为改动大体相同,所以不再赘述,使用捕食行为作为例子进行说明,
[0090]
fitness(prey)<fitness_global
ꢀꢀ
(7)
[0091]
首先进行鱼群的初始化之后对整个鱼群迭代gen_times次,在每次迭代中,每条人工鱼都会进行觅食、聚群和追尾的行为,之后根据适应度函数,计算出进行相应行为之后所在水域的营养物质浓度,最后比较三种行为的适应度值,得到最优适应度值fitness_best,人工鱼计算卸载算法afsa(artificial fish swarm algorithm)首先要初始化车辆初始位置xn,车辆移动步长step,车辆可侦察视野vision,迭代搜索次数max_gen,当满足卸载要求或达到最大迭代次数时,终止优化返回结果,否则继续执行,然后计算每一辆车的最优适应度值,调用子算法实现人工鱼的捕食行为,移动到视野内更好的计算任务卸载位置,调用子算法实现人工鱼的聚群行为,向更好的计算任务卸载位置移动,调用子算法实现人工鱼的追尾行为,向更好的计算任务卸载位置移动,比较人工鱼进行三种行为之后的适应度值,其
中最小适应度值记为最优适应度值,并记录当前位置为卸载最有位置,返回进行下一条鱼的最优适应度计算,迭代计数器加一并返回继续进行迭代,
[0092]
fitness_best=min{fitness_prey,fitness_swarm,fitness_follow}
ꢀꢀꢀꢀ
(8)
[0093]
其中,fitness_best为最优适应度值,fitness_prey、fitness_swarm和fitness_follow分别为聚群行为、追尾行为和捕食行为的适应度值,min为取最小值函数。
[0094]
本发明步骤第2.2中算法的复杂度通常表示为一个函数,该函数的定义域为输入数据的规模,函数值的范围为执行步骤的数量,即时间复杂度,或需要的存储空间,即空间复杂度,时间复杂度是解决问题所需要的时间,通常通过计算部署来度量,设总迭代次数为m,人工鱼数量为f,觅食、聚群、追尾算法的尝试次数为t,
[0095]
因为afsa算法执行过程会执行若干次迭代,且每次迭代会调用若干次觅食、聚群和追尾算法,所以算法的时间复杂度为:
[0096]
o(m*f*(o(t)+o(t)+o(t)))≈o(m*f*t)
ꢀꢀ
(9)
[0097]
afsa算法中需要储存的变量为人工鱼群的位置及最优适应度值及其他辅助变量,而人工鱼群位置和人工鱼数量成正比,最优适应度值和总迭代次数成正比,所以本算法的空间复杂度为:
[0098]
o(m*f)
ꢀꢀ
(10)。
[0099]
在研究的场景中,每辆车辆都会拥有一个专属的任务,每个任务由一个三元组组成,其中包括任务量bi,处理每个字节所需要的cpu循环数c以及每个任务所能等待的最长时间即任务将任务是否卸载标记为offload
i,j
,offload
i,j
={0,1},其中0代表车辆ui的任务在本地执行,1代表车辆ui的任务卸载到飞蜂窝基站bj,并且将飞蜂窝基站bj是否将任务传输到核心网络基站mm标记为transport
j,m
={0,1},其中0代表不传输,1代表传输。
[0100]
本地任务处理的最大cpu(central processing unit)频率为本地卸载任务的最大天线发射功率为最小发射功率为bs(base station)卸载任务的最大天线发射功率为最小发射功率为天线发射功率会受各种因素影响,为了方便讨论,最终实际的本地发射功率和bs发射功率p
ij
、p
jm
会在最大值和最小值之间按泊松分布随机波动,符合现实场景。假定核心网络层由足够大的发射功率,并且处理任务的时间和处理结果回传时间可忽略不计,bs基站处理速度足够快,任务处理时间可忽略不计。根据香农定理,车辆ui任务传输到飞蜂窝基站bj的传输速度为
[0101][0102]
飞蜂窝基站bj任务传输到核心网络基站mm的传输速度为
[0103][0104]
其中w为信道带宽,g为信道增益,σ2为高斯噪声。g=l-6
,l为两者之间的距离。
[0105]
如果在本地处理任务,则任务处理时间为
[0106]
t
i,exe
=bi·
c/fiꢀꢀꢀ
(13)
[0107]
其中fi为车辆ui的cpu频率,假设cpu频率稳定不变且不随时间改变。则本地任务处理能耗为
[0108][0109]
如果任务被卸载到飞蜂窝基站bj处理,则传输时间为
[0110][0111]
传输能耗为
[0112]eij
=p
ij
·
t
ij
ꢀꢀ
(16)
[0113]
如果任务被传输到核心网络基站mm处理,则传输时间为
[0114][0115]
其中传输能耗为
[0116]ejm
=p
jm
·
t
jm
ꢀꢀ
(18)
[0117]
前景理论由daniel kahneman和amos tversky提出,前景理论针对期望效用函数理论(eut,expected utility theory)所建立的绝对理性提出了根据结果与展望(即预期、设想)的差距来进行决策的人的模型。人们根据心里预期的结果来衡量每个结果,如果结果回报大,但风险高,人们往往会放弃高风险高回报,转而偏好确定的小收益,如果结果回报低,风险也低,人们又偏向于高风险高回报的结果。所以人的卸载决策不可能是绝对理性的。前景理论的数学模型包括两个函数,即价值函数(value function)和概率比重函数(probability weighting function)。
[0118]
价值函数使用tversky函数,充分考虑大多数人的心理预期
[0119][0120]
其中d是理论适应度函数,即不考虑前景理论的原始价值函数,β是风险厌恶参数,与函数影响成反比,λ是风险惩罚参数,λ越大则v(d)对风险越敏感。
[0121]
概率比重函数使用prelec函数,
[0122][0123]
其中α为可能性扭曲参数,α值越小,对可能性的影响越大,即越偏离理性。pi为任务卸载成功概率,pi∈[0,1],如果卸载失败,则任务在本地进行,并且会产生额外惩罚d。
[0124]
在eut系统中,可以得到问题的适应度函数,任务卸载成功时
[0125][0126]
卸载失败时
[0127]
fitness
false
=e
i,exe
+d
ꢀꢀ
(22)
[0128]
前景理论包括编辑和估值两个阶段,在编辑好可能的选择后决策制定者会对期望进行估值并重新选择。被编期望的全部价值v可以用两个主观度量决策权重(π)和主观价值(v)来表达,如果(x,p;y,q)是一个一般性期望,那么
[0129]
v(x,p;y,q)=π(p)v(x)+π(q)v(y)
ꢀꢀ
(23)
[0130]
则在本问题的估值阶段中将tversky函数和prelec函数加入到适应度计算后可以得到公式(14)
[0131]
fitness
pt
=v(fitness
sucess
)
·
w(pi)+v(fitness
false
)w(1-pi)
ꢀꢀ
(24)
[0132]
最后得到本问题的适应度
[0133][0134]
在本发明考虑的情景中,将会设置20辆带有信息处理能力的车辆,5个飞蜂窝基站以及3个远程mec基站,车辆距离飞蜂窝基站的距离为50m。车辆计算任务体量为bi,大小为5mb~20mb。网络传输信道带宽w为5mhz,环境噪声σ2为-100dbm。本地传输功率p
ij
为50mw~100mw,bs传输功率p
jm
为1w~2w。根据蜂窝无线电环境的无线信道模型,将信道增益设定为g=l-6
。本地处理一位数据需要的cpu循环数c为1000,不同车辆的cpu频率fi为1ghz~2ghz,cpu能耗系数κ为10-28
。在前景理论模型中,将可能性扭曲参数α设定为0.6,风险厌恶参数β为0.8,风险惩罚参数λ为3。其他参数值可在表1中查找。
[0135]
表1参数设置
[0136][0137][0138]
附图1所示。通过在移动网络边缘部署mec服务器,mec可以提供接近移动设备用户的计算和存储资源。因此,可以通过将计算转移到边缘云中附近的mec服务器来实现低延迟。
[0139]
附图2为飞蜂窝基的系统模型,因为飞蜂窝基站部署在距离车辆较近的地理位置,所以在与车辆的通信过程中具有较低的网络传输延迟和较高的数据传输速度,车辆在通信
过程中会先和飞蜂窝基站通信,如果需要进行卸载,再通过飞蜂窝基站与核心网络层进行数据通信。
[0140]
附图3展示了中提出的iafsa(improved artificial fish swarm algorithm)算法和本地执行算法(local)、全部卸载算法(offload)以及随机算法(random)在不同车辆数量下适应度值的变化情况,本地执行算法为所有任务全部在本地执行,全部卸载算法将任务全部卸载到bs执行。从图中可以看出全部本地执行由于车辆数量的增加,导致任务量越来越大,使得执行时间和能耗也不断增加;全部卸载算法的适应度值比较小,iafsa算法在开始时较全部卸载算法首尾两部分较低,中部较高,因为用户的主观意识在起作用,当卸载用户较多时,bs处理任务时间较长,所以部分用户会选择保守的方式,即在本地执行任务,使得整个系统的综合能耗较低。
[0141]
附图4表明了卸载可能性和概率扭曲参数对实验结果的影响,由图可知pi从0.4到0.6时,随着卸载概率的扭曲,使得卸载用户逐渐增多,使得适应度值会随着用户的增多而变大,但是到了0.6时,随着概率扭曲参数的增大,用户的心理参考点发生转变,由逐利变为止损,所以卸载的用户会减少一部分,适应度值会有一定减少;而当pi继续增加时,随着适应度值地增加,卸载用户数量减少,选择本地处理任务的用户会增多,导致适应度值有一定的增加。
[0142]
附图5表明了用户越厌恶风险,则越会选择保守的方式,所以适应度的值会上升,并且任务失败的惩罚越大,越会刺激用户的保守思想。
[0143]
附图6是人工鱼视野参数vision和拥挤度crowd对于实验结果的影响,视野的增大会让人工鱼找到更多觅食点,增加寻优的可能性,但是视野太大计算量也会增大,导致时间性能不能满足,所以在一定程度上,人工鱼的视野参数的选择会决定实验结果的好坏;拥挤度crowd对于算法的影响并不是很明显,它主要反映了在聚群和追尾行为中,中心鱼群所包含的鱼的数量,拥挤度参数与鱼群中心拥挤程度呈反比,防止结果陷入局部极值,保证寻优的效果。
[0144]
附图7表明常识次数try_num对于算法结果的影响并不是很大,尝试次数虽然增加,但是对于随机的位置来说,不能保证找到最优的解。
[0145]
附图8表示了额外惩罚di对适应度值的影响,惩罚太大太小都会导致适应度值的增加。
[0146]
真实场景设置在城市道路中,场景如附图9所示,rsu(road side unit)可以覆盖整个道路范围,设置5个类似的城市道路场景,车辆在道路上的分布遵循随机分布。比较差分进化算法(differential evolution,de)、混沌量子粒子群算法(chaos quantum-behaved particle swarm optimization,cqpso)、量子粒子群算法(quantum behaved particle swarm optimization,qpso)和提出的算法在使用与不使用前景框架下的性能。
[0147]
附图10和附图11分别是应用前景框架车辆数量对平均适应度的影响和不应用前景框架车辆数量对平均适应度的影响,从图中可以看出,随着车辆数量的增加,各个算法的适应度值也在不断增加,提出的算法在不使用前景框架的前提下,性能一般,受边缘设备数量影响与de算法和cqpso算法接近;在使用前景框架后提出的算法能够取得更好的效果,更适合表达现实世界中真实场景。
[0148]
图12和图13为不同算法的收敛速度,qpso算法收敛较快,但是最优适应度值并不
理想,de和cqpso算法在理想状态下收敛效果较好,在应用前景理论后,提出算法的最优适应度值在对比算法中最低,能够较好的适应真实世界的任务卸载问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1