一种基于微动平台的微透镜阵列聚焦型光场相机的制作方法
1.本发明涉及光场成像技术领域,具体为一种基于微动平台的微透镜阵列聚焦型光场相机。
背景技术:
2.光场用于描述光在三维空间的辐射传输特性。根据人眼对外部光线的视觉感知,提出了七维全光函数来表征空间分布的几何光线。全光函数包含七个变量,用于表示光线中任一点的三维坐标,光线的传输方向,光线的波长,以及时间。考虑光线在自由空间中的传输,其颜色(波长)一般不会发生变化,忽略光线在传输过程中的衰减,可将七维全光函数(光场)降至四维,即光线的空间位置及光线的传输方向。
3.传统的相机只能记录光线的空间位置信息,光场相机能够通过一次曝光,同时记录空间光学的二维位置空间信息(对应于空间分辨率)和二维方向信息(对应于角度分辨率)。
4.角度分辨率可以认为是发光点能进入主透镜的光线被离散化的程度。角度分辨率越高,视差信息就越丰富。空间分辨率表征的是被采集场景表面离散化程度,空间分辨率越高图像分辨率越高,包含的细节越多。提升光场相机的空间分辨率能够使目标具有更多的细节信息,有利于进一步图像处理,例如目标检测。提升光场相机的角分辨率,有助于提高深度估计精度,获得不同焦点的清晰成像图。
5.光场相机具有多种实现方式,包括相机阵列、微透镜阵列、掩膜。而基于微透镜阵列(mla)的光场相机结构紧凑、数据处理较为方便,成为目前光场相机的研究热点,并被广泛地应用于学术研究以及商业领域。
6.微透镜阵列光场相机分为传统型光场相机和聚焦型光场相机,传统光场相机受限于微透镜的大小,无法获得很高的空间分辨率。聚焦型光场相机很好的解决了这一问题,通过调整微透镜阵列与主镜像面的距离,以及图像传感器与微透镜阵列的距离之间的关系,可以选择合适的方向分辨率和空间分辨率。但无法同时获得高空间分辨率和高角度分辨率的光场图像。
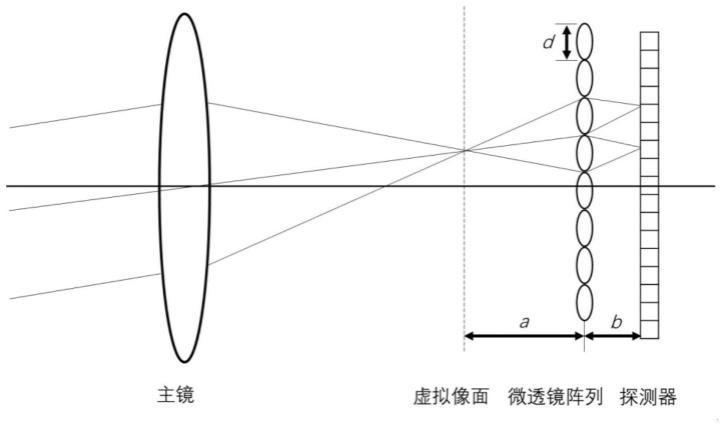
7.标准的聚焦型光场相机成像模块如图1所示。由光学系统(主镜)、微透镜阵列、探测器组成。标准的聚焦型光场相机成像模块的空间分辨率与角度分辨率相互制约。若微透镜阵列与主镜像面的距离为a,探测器与微透镜阵列的距离b,则光场相机的空间分辨率为角度分辨率为其中,res
det
为探测器的分辨率。这种情况下,要得到高空间分辨率,就需要牺牲角度分辨率。同样的,要获得高角度分辨率,则需要牺牲空间分辨率。
技术实现要素:
8.本发明的目的在于提供一种基于微动平台的微透镜阵列聚焦型光场相机,以解决上述背景技术中提出的问题。
9.为实现上述目的,本发明提供如下技术方案:一种基于微动平台的微透镜阵列聚
焦型光场相机,包括成像模块、超精密机电微动模块与信号处理引擎,其中成像模块为红外成像模块或可见光成像模块,成像模块具有光学系统、微透镜阵列以及探测器;超精密机电微动模块包括微动平台及其控制器,其中微动平台带动负载做有规律的运动;控制器用于微动平台的驱动与高精度位置控制,并在信号处理引擎的控制下按要求输出控制指令给微动平台;信号处理引擎用于获取用户输入指令,并根据用户输入指令实现工作模式的选择与切换;
10.其中,所述聚焦型光场相机被设置为能够实现配置a、配置b、配置c、配置d以及配置e中的至少一种,
11.在所述配置a中,微动平台带动微透镜阵列实现光轴方向的平移;
12.在所述配置b中,微动平台安装于光学系统内部,其负载可以是光学系统的透镜、透镜组、反射镜,微动平台带动负载实现垂直于光轴平面上的水平、垂直方向平移;
13.在所述配置c中,微动平台带动探测器实现垂直于光轴平面上的水平、垂直方向平移;
14.在所述配置d中,配置d为上述配置a与配置b的组合,配置d引入配置a、配置b的两个微动平台,分别带动微透镜阵列及光学系统负载运动;
15.在所述配置e中,配置e为上述配置a与配置c的组合,配置e引入配置a与配置c的两个微动平台,并分别带动微透镜阵列及探测器运动。
16.优选的,微动平台为基于压电/电磁/音圈技术的超精密机电微动平台。
17.优选的,信号处理引擎用于实现成像模块的探测器触发以及图像数据采集、超精密机电微动模块与成像模块的探测器触发之间的时序控制,以及对采集到的图像进行处理计算,并将处理后的结果发送给后端设备。
18.与现有技术相比,本发明的有益效果是:
19.本发明解决了标准聚焦型光场相机的空间分辨率及角度分辨率之间权衡取舍的问题,采用配置a结构在不改变标准成像系统其他位置关系的情况下,通过微动平台进行两个位置的切换,能够获得高空间分辨率或高角度分辨率的光场图像。采用配置b和配置c结构在优先保证光场相机角度分辨率的情况下,通过微扫描技术提升空间高分辨率。采用配置d和配合e结构同时保留配置a和配置b/c的结构优点,具有更高的可操作性。
附图说明
20.图1为背景技术中标准聚焦型光场相机成像模块图;
21.图2为背景技术中标准聚焦型光场相机系统示意图;
22.图3为本发明实施例中配置a成像模块示意图;
23.图4为本发明实施例中配置a系统示意图;
24.图5为本发明实施例中配置b成像模块示意图;
25.图6为本发明实施例中配置b系统示意图;
26.图7为本发明实施例中配置c成像模块示意图;
27.图8为本发明实施例中配置c系统示意图;
28.图9为本发明实施例中常用微扫模式。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.在本发明的描述中,需要说明的是,术语“垂直”、“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
32.本发明提供一种技术方案:一种基于微动平台的微透镜阵列聚焦型光场相机,由成像模块、超精密机电微动模块、以及信号处理引擎构成。
33.在本实施例中,成像模块由光学系统(主镜)、微透镜阵列以及探测器组成。成像模块可以是红外成像模块也可以是可见光成像模块。
34.在本实施例中,超精密机电微动模块包含微动平台及其控制器。微动平台带动负载做有规律的运动;控制器用于微动平台的驱动与高精度位置控制,并在信号处理引擎的控制下按要求输出控制指令给微动平台。微动平台可以是基于压电/电磁/音圈技术的超精密机电微动平台。
35.在本实施例中,信号处理引擎能够根据用户输入指令实现工作模式的选择与切换;能够实现成像模块的探测器触发以及图像数据采集;能够实现超精密机电微动模块与成像模块的探测器触发之间的时序控制;能够实现对采集到的图像进行处理计算,并将处理后的结果发送给后端设备。
36.在本实施例中,上述聚焦型光场相机被设置为能够实现配置a、配置b、配置c、配置d以及配置e中的至少一种。
37.配置a:系统结构如图4所示,成像模块如图3所示,微动平台带动微透镜阵列实现光轴方向的平移,成像模块如图2所示且为标准的成像模块。
38.在本实施例中,配置a针对聚焦型光场相机不能完美平衡空间分辨率与角度分辨率的缺点,引入了微动平台,微动平台能够带动微透镜阵列实现位置1和位置2的切换。对于标准的聚焦型光场相机而言。存在位置1和位置2这一对共轭面(即a+b=常数),在不改变当前成像系统其他位置关系的情况下,通过这两个位置的切换,能够获得高空间分辨率或高角度分辨率的光场图像。如图1所示,光场相机的空间分辨率为角度分辨率为
39.在本实施例中,配置a中微动平台可以是一维微动平台,实现沿光轴方向的运动。
40.当微透镜阵列位于位置1时,a》b,光场相机的空间分辨率<角度分辨率。
41.当微透镜阵列位于位置2时,a’《b’,光场相机的空间分辨率》角度分辨率
42.对于配置a,其控制步骤如下,
43.s1:信号处理引擎接收到用户输入指令,执行光场相机图像采集及处理;
44.s2:信号处理引擎发送指令给微动平台控制器,微动平台控制器驱动微动平台带动微透镜阵列移动,使其运动到指定位置上;
45.(a):高角度分辨率模式对应位置1;
46.(b):高空间分辨率模式对应位置2;
47.s3:微动平台到位后,信号处理引擎发送探测器触发信号进行光场图像的采集;
48.s4:信号处理引擎对采集的图像计算处理后输出给后端设备;
49.s5:重复步骤s1-4。
50.在本实施例中,配置a能够分时获得高空间分辨率及高角度分辨率光场图像,但没有额外的场景信息补充。由此引入微扫描技术,在优先保证光场相机角度分辨率的情况下,通过微扫描技术提升空间高分辨率,理论提升比例为n倍,n为微扫描模式。微扫描技术通过对同一场景的多次采样,实现空间分辨率的提升。这里,微动平台可以是二维微动平台。
51.配置b:系统结构如图6所示。微动平台安装于光学系统内部,其负载可以是光学系统的透镜、透镜组、反射镜等。微动平台带动负载实现垂直于光轴平面上的水平、垂直方向平移,成像模块如图5所示。
52.对于配置b,微动平台带动负载做有规律的平移,在光学系统(主镜)的虚拟面处获得具有相位差异的空间场景信息,经微透镜阵列二次成像及探测器采集后获得具有亚像素信息的光场图像序列。经信号处理引擎图像处理后,获得具有更高空间分辨率的光场图像。
53.对于配置b,其控制步骤如下:
54.s1:信号处理引擎接收到用户输入指令,执行n
×
n微扫描模式(其中,n=2,3,4,
…
,n一般不大于10),运动步长为l;
[0055][0056]
其中,d
pixel
为探测器像元尺寸,n为微扫模式,β微透镜的放大率,β=b/a;
[0057]
s2:信号处理引擎发送指令给微动平台控制器,运动模式见图9,运动步长为l;
[0058]
(a):控制器驱动微动平台带动负载运动;
[0059]
(b):微动平台到位后,信号处理引擎触发探测器曝光,并进行光场图像采集;
[0060]
(c):信号处理引擎对采集的图像计算处理后输出给后端设备;
[0061]
(d):信号处理引擎按运动模式更新位移;
[0062]
(e):重复步骤(a)-(d),直至完成一个周期微扫描;
[0063]
s3:重复步骤s1-2。
[0064]
配置c:系统结构图8所示。微动平台带动探测器实现垂直于光轴平面上的水平、垂直方向平移。成像模块如图7所示。
[0065]
对于配置c,微动平台带动探测器做有规律的亚像素平移,使探测器采集到同一场景具有相位差异的光场图像序列。经信号处理引擎图像处理后,获得具有更高空间分辨率的光场图像。
[0066]
对于配置c,其控制步骤如下:
[0067]
s1:信号处理引擎接收到用户输入,执行n
×
n微扫描模式(其中,n=2,3,4,
…
,n一般不大于10),运动步长其中,d
pixel
为探测器像元尺寸;
[0068]
s2:信号处理引擎发送指令给微动平台控制器,运动模式见图9,运动步长为l;
[0069]
(a):控制器驱动微动平台带动负载运动。
[0070]
(b):微动平台到位后,信号处理引擎触发探测器曝光,并进行光场图像采集。
[0071]
(c):信号处理引擎对采集的图像计算处理后输出给后端设备。
[0072]
(d):信号处理引擎按运动模式更新位移。
[0073]
(e):重复步骤(a)-(d),直至完成一个周期微扫描重复步骤s1-2。
[0074]
配置d:为配置a与配置b的组合。
[0075]
对于配置d,为配置a和配置b组合,引入两个微动平台,分别带动微透镜阵列及光学系统负载(透镜、透镜组、反射镜等)运动。
[0076]
可以实现:
[0077]
微透镜位于位置1(高角度分辨率模式)时,角度分辨率不变,光学系统负载微扫描提升空间分辨率,理论提升比为n倍,n为微扫描模式。
[0078]
微透镜位于位置2(高空间分辨率模式)时,角度分辨率不变,光学系统负载微扫描进一步提升空间分辨率,理论提升比为n倍,n为微扫描模式。
[0079]
配置e:为配置a与配置c的组合。
[0080]
对于配置e,为配置a和配置c组合,引入两个微动平台,分别带动微透镜阵列及探测器运动。
[0081]
可以实现(与配置d相同):
[0082]
微透镜位于位置1(高角度分辨率模式)时,角度分辨率不变,探测器微扫描提升空间分辨率,理论提升比为n倍,n为微扫描模式。
[0083]
微透镜位于位置2(高空间分辨率模式)时,角度分辨率不变,探测器微扫描进一步提升空间分辨率,理论提升比为n倍,n为微扫描模式。
[0084]
值得注意的是:对于微动探测器的结构而言,由于光场相机的微透镜阵列和探测器像元需要严格耦合,而探测器的芯片及像元尺寸往往非常小,通常只有几个微米,因此实际操作过程中配准的难度极大,耦合效率较低。而微动平台(二维微动平台)的引入可以有效的解决这一问题,微动平台(二维微动平台)具有纳米级别的调整精度,通过改变平台的输入信号即可实现微透镜阵列与探测器的高精度耦合。
[0085]
而且本专利以微透镜位于主镜像面后方,在探测器上成实像为例,但本专利提出的方法不仅限于该模式,同样适用于微透镜位于主镜像面前方,在探测器上成虚像结构的聚焦型光场相机。
[0086]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1