一种车联网智能终端及其拆除检测系统及车辆的制作方法
1.本发明实施例涉及拆除检测技术,尤其涉及一种车联网智能终端及其拆除检测系统及车辆。
背景技术:
2.根据要求,车载车联网智能终端(t-box)需要具备拆除报警功能,即当车载t-box终端识别出自己被从整机设备上拆除下来时,需要向国家环保监控平台上报报警信息。
3.为了满足上述要求,现有的t-box终端往往采用两种方案,一种是采用整机设备停止时停止监控拆除行为,因此无法在整机设备停止时实现防拆车载t-box终端的报警。另一种方案是在整机设备停止时保持开机状态,实时监控拆除行为,这种方案在整机设备停止时仍能实现对车载t-box终端的拆除监控,但该方案要求车载t-box终端一直处于工作状态,因此会需要消耗整机系统电池的大量电量,若整机设备长时间不工作,可能会导致整机系统的蓄电池亏电,而影响后续整机设备的应用。
技术实现要素:
4.本发明提供一种车联网智能终端的拆除检测系统,能够在实时监控拆除行为的基础上保持低能耗,减少电池电量的损耗,避免影响后续整机设备的应用。
5.第一方面,本发明实施例提供了一种车联网智能终端的拆除检测系统,包括:
6.电源控制电路模块;
7.主控模块,所述主控模块用于在休眠状态下根据接收到的唤醒触发信号进入正常工作状态,并控制所述电源控制电路模块处于供电状态;所述主控模块还用于在正常工作状态下接收拆除识别信号,根据所述拆除识别信号生成拆除报警信息;
8.通讯模块,所述通讯模块用于在正常工作状态的所述主控模块的控制下,上传所述拆除报警信息。
9.可选的,还包括电锁电路模块,所述电锁电路模块用于获取整机设备的状态,若所述整机设备处于停机状态,则控制所述电源控制电路模块处于断供状态;若所述整机设备处于开机状态,则控制所述电源控制电路模块处于供电状态;
10.所述主控模块用于根据所述整机设备的停机状态进入休眠状态,根据所述整机设备的开机状态进入正常工作状态。
11.可选的,若所述电源控制电路模块处于断供状态,则所述电源控制电路模块停止供电;若所述电源控制电路模块处于供电状态,则所述电源控制电路模块至少向所述通讯模块供电。
12.可选的,所述主控模块在休眠状态下,仅用于接收所述唤醒触发信号。
13.可选的,所述外部电源向所述主控模块供电,所述电源控制电路模块通过所述外部电源供电。
14.可选的,还包括内部电池,所述内部电池向所述主控模块供电,所述电源控制电路
模块至少部分通过所述内部电池供电。
15.可选的,还包括定位模块,所述定位模块用于在正常工作状态的所述主控模块的控制下,记录实时地点信息;
16.其中,所述拆除报警信息包括所述实时地点信息。
17.可选的,所述主控模块包括信号检测端,所述唤醒触发信号和所述拆除识别信号均为所述信号检测端处于悬空状态。
18.第二方面,本发明实施例还提供了一种车联网智能终端,包括上述任意一种车联网智能终端的拆除检测系统。
19.第三方面,本发明实施例还提供了一种车辆,包括上述车联网智能终端。
20.本发明实施例提供了车联网智能终端的拆除检测系统,包括:电源控制电路模块;主控模块,主控模块用于在休眠状态下根据接收到的唤醒触发信号进入正常工作状态,并控制电源控制电路模块处于供电状态;主控模块还用于在正常工作状态下接收拆除识别信号,根据拆除识别信号生成拆除报警信息;通讯模块,通讯模块用于在正常工作状态的主控模块的控制下,上传拆除报警信息。本发明实施例的拆除检测系统能够在唤醒触发信号到来前处于主控模块休眠,电源控制电路模块未供电的低功耗状态。在低功耗状态下依然能够根据唤醒触发信号和拆除识别信号进行报警。因此能够在实时监控拆除行为的基础上保持低能耗,减少整机设备电池电量的损耗,避免影响后续整机设备的应用。
附图说明
21.图1为本发明实施例提供的一种车联网智能终端的拆除检测系统的结构示意图;
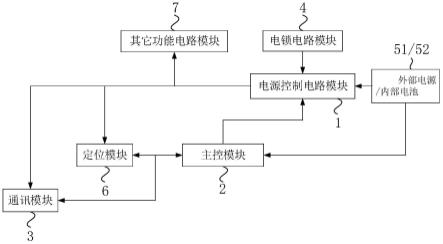
22.图2为本发明实施例提供的另一种车联网智能终端的拆除检测系统的结构示意图。
具体实施方式
23.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
24.图1为本发明实施例提供的一种车联网智能终端的拆除检测系统的结构示意图,参见图1。本发明实施例提供了一种车联网智能终端的拆除检测系统,包括:
25.电源控制电路模块1;
26.主控模块2,主控模块2用于在休眠状态下根据接收到的唤醒触发信号进入正常工作状态,并控制电源控制电路模块1处于供电状态;主控模块2还用于在正常工作状态下接收拆除识别信号,根据拆除识别信号生成拆除报警信息;
27.通讯模块3,通讯模块3用于在正常工作状态的主控模块2的控制下,上传拆除报警信息。
28.其中,电源5用于向主控模块2和电源控制电路模块1供电。电源控制电路模块1用于根据控制信号向主控模块2以外的用电模块供电,本发明实施例不针对电源控制电路模块1的具体类型进行限定,满足上述需求即可。主控模块2可以是任意一种用于处理计算信息的模块,例如可以是微控制单元(mcu)。通过主控模块2可以处于低功耗的休眠状态或激
活全部所需功能的正常工作状态。可选的,在主控模块2处于休眠状态下,仅能够检测是否接收到唤醒触发信号。在接收到休眠唤醒触发信号后,主控模块2从休眠状态下转换为正常工作状态。正常工作状态下的主控模块2发送控制指令,使电源控制电路模块1处于供电状态。电源控制电路模块1向通讯模块3等功能模块供电,以供通讯模块3根据主控模块2的控制指令执行相应功能。主控模块2处于休眠状态的条件可以根据实际需要确定。例如可以将主控模块2的初始状态设置为休眠状态。也可以根据整机设备的状态调节主控模块2的状态,例如当整机设备处于停机状态时,设置主控模块2为休眠状态。当整机设备处于开机状态时,设置主控模块2为正常工作状态。唤醒触发信号和拆除识别信号均可以是任意因拆除t-box而触发的信号。唤醒触发信号和拆除识别信号可以是同一信号,也可以是不同信号。例如,因拆除t-box而触发的信号可以是,将主控模块2的输入输出端连接到整机设备的电池正极、电池负极或电池接地端。将输入输出端的电平改变范围超过预设范围,或者输入输出端处于悬空状态作为因拆除t-box而触发的信号。其中预设范围可以根据实际需要确定。通讯模块3可以是任意一种能够通过网络将拆除报警信息上传到相应信息平台的模块。例如可以是物联网通讯模块。本发明实施例的拆除检测系统能够在唤醒触发信号到来前主控模块2处于低功耗的休眠状态,电源控制电路模块1处于断开状态。在低功耗状态下依然能够根据唤醒触发信号和拆除识别信号进行报警。因此使得t-box不仅在整机设备处于停机状态下也能实现实时监控拆除行为,同时也实现了对整机设备电池电量消耗的最低化,以避免影响后续整机设备的使用。
29.图2为本发明实施例提供的另一种车联网智能终端的拆除检测系统的结构示意图,参见图2。在另一些实施例中,还包括电锁电路模块4,电锁电路模块4用于获取整机设备的状态,若整机设备处于停机状态,则控制电源控制电路模块1处于断供状态;若整机设备处于开机状态,则控制电源控制电路模块1处于供电状态;
30.主控模块2用于根据整机设备的停机状态进入休眠状态,根据整机设备的开机状态进入正常工作状态。
31.其中,电锁电路模块4用于根据整机设备状态控制电源控制电路模块1在停机状态和断供状态间切换。主控模块2根据整机设备状态在休眠状态和正常工作状态间切换。
32.进一步的,若电源控制电路模块1处于断开状态,则电源控制电路模块1停止供电;若电源控制电路模块1处于导通状态,则电源控制电路模块1至少向通讯模块3供电。
33.当整机设备处于开机状态时,电锁电路模块4通过控制电源控制电路模块1导通,电源控制电路模块1进入供电状态。使得电源给车载t-box终端内部各个模块供电,车载t-box终端处于正常工作模式。车载t-box终端内部主控模块2对拆除识别信号的状态进行实时监测,当主控模块2检测到拆除识别信号,则认为车载t-box终端被拆除,车载t-box终端立即向平台回传拆除报警信息。
34.为了能识别出车载t-box终端的是否被拆除,可选的,主控模块2可以包括信号检测端,唤醒触发信号和拆除识别信号均为信号检测端处于悬空状态。可以把主控模块2的信号检测端接到整车设备蓄电池的正极、负极或整机电气线束接地点。当车载t-box终端被拆除时,主控模块2的信号检测端与整车设备蓄电池的正极、负极或整机电气线束接地点的连接断开,拆除识别信号的状态由接地状态变为悬空状态。车载t-box终端内部的主控模块2检测到拆除识别信号状态发生变化,立即通过通讯模组将车载t-box终端的拆除报警信息
上传给平台。
35.当整机设备处于停机状态时,电锁电路模块4会自动断开对电源控制电路模块1的控制,此时由主控模块2继续对电源控制电路模块1进行控制。在车载t-box终端完成设备关机时进行的数据存储后,主控模块2会控制电源控制电路模块1切断由电源控制电路模块1供电的其它功能模块的电源,电源控制电路模块1进入断供状态。仅剩主控模块2耗电,用以减少车载t-box终端对电池的消耗。同时主控模块2也会自动进入待机模式,进一步减少对电池的消耗。
36.当车载t-box终端被拆除时,唤醒触发信号和拆除识别信号的状态发生变化,主控模块2从休眠状态进入正常工作状态,同时主控模块2控制电源控制电路模块1,使其处于导通状态。电源控制电路模块1能够给通讯模块3等用电模块供电,使车载t-box终端进入正常的工作状态。当车载t-box终端进入正常的工作状态后,主控模块2对拆除识别信号的状态进行检测,用以确认t-box是否被拆除。如果检测到拆除识别信号的状态发生变化则判断车载t-box终端已被拆除,主控模块2通过通讯模组将车载t-box终端拆除报警信息上传给平台。
37.继续参见图2,在另一些实施例中,外部电源51向主控模块2供电,电源控制电路模块1通过外部电源51供电。
38.其中,外部电源51可以包括整车设备电池,可以通过整车设备电池向t-box终端的主控模块2和电源控制电路模块1供电。
39.继续参见图2,在另一些实施例中,还包括内部电池52,内部电池52向主控模块2供电,电源控制电路模块1至少部分通过内部电池52供电。
40.其中,可以仅由内部电池52向t-box终端的主控模块2,以及通过电源控制电路模块1向t-box终端的其他用电模块供电。也可以由内部电池52和外部电源51混合向t-box终端供电。
41.继续参见图2,在另一些实施例中,还包括定位模块6,定位模块6用于在正常工作状态的主控模块2的控制下,记录实时地点信息。其中,拆除报警信息包括实时地点信息。
42.其中,在电源控制电路模块1处于供电状态时,可以向定位模块6供电。主控模块2在进行拆除报警信息上传前,可以读取定位模块6中的实时地点信息,并将该位置信息作为拆除报警信息中的一部分上传到相应信息平台。定位模块6可以是任意一种能够获取t-box终端位置信息的模块。例如定位模块6可以是全球定位系统(gps)模块。
43.继续参见图2,在另一些实施例中,还包括其他功能电路模块7,例如控制器局域网络(can)电路模块和串口通讯电路模块等。
44.其中,在电源控制电路模块1处于供电状态时,可以向can电路模块和串口通讯电路模块供电。主控模块2可以通过can电路模块和串口通讯电路模块与外部通讯。
45.本发明实施例还提供了一种车联网智能终端,包括上述任意一种车联网智能终端的拆除检测系统。
46.其中,由于本发明实施例中的车联网智能终端包括上述任意一种车联网智能终端的拆除检测系统,因此本实施例中的车联网智能终端具有与车联网智能终端的拆除检测系统相应的技术特征和有益效果。
47.本发明实施例还提供了一种车辆,包括上述车联网智能终端。
48.其中,由于本发明实施例所提供的车辆包含本发明任意实施例所提供的上述车联网智能终端,因此本实施例中的车辆具有与上述车联网智能终端相同的有益效果。
49.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整、相互结合和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1