一种基于光斑跟踪的相机调焦方法与流程
1.本发明涉及相机调焦技术领域,尤其涉及一种基于光斑跟踪的相机调焦方法。
背景技术:
2.在工业领域,清晰的图像可以更正确的反映待观测对象,获取更准确的信息。但在实际的应用场景中,待观测物体会相对成像系统前后移动,导致图像时而清晰,即正焦状态,时而模糊,即离焦状态。手动调焦具有主观性强、效率低、实时性差等缺点,在复杂、高速的工业生产环境中难以胜任。
3.依靠人工经验手动调焦以获取较理想的成像效果,需要对从业人员进行单独的训练,需要较高的人力成本,并且具有主观性强、效率低、实时性差等缺点。同时,工业生产环境存在实时性高、速度快、复杂度高、安全性差等特点,也使得人工难以胜任。
4.cn104570568a专利中,揭示了对焦过程需要重复多次对焦,难以应对实时的生产需要;cn104917970a专利中,对焦过程需要使用对每张图片都进行复杂的快速傅里叶变换(fast fourier transform),以获取高频分量和低频分量,再进行清晰度估计,需要消耗大量的计算资源,也难以满足实时的生产需要。
5.为此,相机在工业应用场景中难以高质量成像,同时解决清晰度计算的时耗问题是目前相机在工业应用中迫切需要解决的问题。
技术实现要素:
6.本发明实施例提供了一种基于光斑跟踪的相机调焦方法,用于相机在工业化应用中高质量成像同时快速调焦的问题。
7.本发明实施例提供了一种基于光斑跟踪的相机调焦方法,包括:
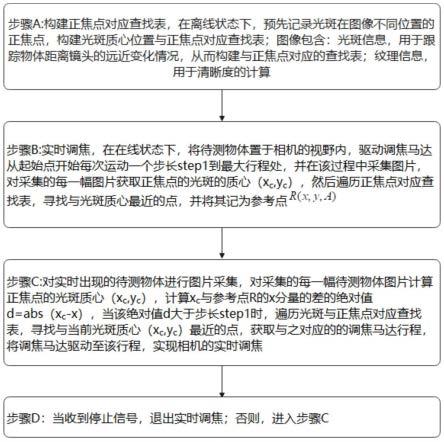
8.步骤a:构建正焦点对应查找表,在离线状态下,预先记录光斑在图像不同位置的正焦点,构建光斑质心位置与正焦点对应查找表;图像包含:光斑信息,用于跟踪物体距离镜头的远近变化情况,从而构建与正焦点对应的查找表;纹理信息,用于清晰度的计算;
9.步骤b:实时调焦,在在线状态下,将待测物体置于相机的视野内,驱动调焦马达从起始点开始每次运动一个步长step1到最大行程处,并在该过程中采集图片,对采集的每一幅图片获取正焦点的光斑的质心(xo,yo),然后遍历正焦点对应查找表,寻找与光斑质心最近的点,并将其记为参考点r(x,y,a);其中,xc为光斑的质心的水平方向的坐标,yc为光斑的质心的竖直方向的坐标,参考点r(x,y,a)的x、y、a三个分量,其中x为水平分量,y为竖直分量,a为调焦马达的位置;
10.步骤c:对实时出现的待测物体进行图片采集,对采集的每一幅待测物体图片计算正焦点的光斑质心(xc,yc),计算xc与参考点r的x分量的差的绝对值d=abs(x
c-x),当该绝对值d大于步长step1时,遍历光斑与正焦点对应查找表,寻找与当前光斑质心(xc,yc)最近的点,获取与之对应的的调焦马达行程,将调焦马达驱动至该行程,实现相机的实时调焦;
11.步骤d:当收到停止信号,退出实时调焦;否则,进入步骤c。
12.较佳的方式,步骤a具体包括:
13.a11:搭建离线定焦平台,视觉系统置于运动平台的前方,并将物体置于运动平台上,运动平台的运动方向平行于成像单元的光轴,调节光源亮度和运动平台高度实现正常成像,进入步骤s1-1;
14.s1-1:将调焦马达的行程置零,驱动运动平台由远及近运动,寻找正焦点,运动平台每次步进距离step1为成像单元景深的1/3;记录最大清晰度的值d1
max
,其初始值置零,进入步骤s1-2;
15.s1-2:采集图片,计算图像的清晰度d,并判断图像的清晰度d是否大于d1
max
,如果是则更新最大清晰度d1
max
=d和运动平台的位置值a1,进入步骤s1-3;
16.s1-3:观测运动平台是否运动到了最近端,如果是,则进入s1-4;如果否,则驱动运动平台前进step1,返回步骤s1-2;
17.s1-4:将调焦马达的行程置于最大行程,驱动运动平台由远及近运动;d2
max
用于记录最大清晰度的值,其初始值为零,进入步骤s1-5;
18.s1-5:计算图像的清晰度d,并判断图像的清晰度d是否大于d2
max
,如果是则更新最大清晰度d2
max
=d和运动平台的位置值a2,进入步骤s1-6;
19.s1-6:观测运动平台是否运动到了最近端,如果是则进入s2;如果否则驱动运动平台前进step1,返回步骤s1-5;
20.a12:创建光斑与正焦点对应查找表:将运动平台的行程范围l=a2-a1进行m=1+round(l/step1)等分,其中round()为四舍五入运算,创建光斑与正焦点对应查找表,光斑与正焦点对应查找表包含m个元素,每个元素包含:在正焦点时调焦马达的行程和光斑中心的位置;将运动平台驱动到a1位置,进入步骤s2-1;
21.s2-1:驱动运动平台马达从起始点运动到最大行程处,并在该过程中采集图片,并对每张图片进行计算:
22.a)对每张图片的光斑信息进行二值化,再提取光斑,最后计算光斑的质心(xc,yc),质心的计算公式如下:
[0023][0024][0025][0026]
其中,n为光斑包含的像素数量,p、q、i均为非负整数,x和y为每个像素点横坐标和纵坐标,f(x,y)为坐标(x,y)对应的像素值;
[0027]
b)根据每张图片的纹理信息计算清晰度d,寻找最大清晰度d
max
,即正焦点,并在光斑与正焦点对应查找表中记录此时光斑的质心(xc,yc)和运动平台马达的行程a,进入步骤s2-2;
[0028]
s2-2:观测运动平台是否运动到了a2端,如果是,则完成光斑与正焦点对应查找表的构建;如果否,则驱动运动平台前进step1,返回步骤s2-1。
[0029]
较佳的方式,s2-1中的对每张图片的光斑信息进行二值化为单阈值法或ostu二值
化,提取光斑为blob运算。
[0030]
较佳的方式,s2-1中的根据每张图片的纹理信息计算清晰度d,具体为使用空域方法通过统计图像梯度幅值方法实现。
[0031]
较佳的方式,统计图像梯度幅值方法具体为sobel变换或拉普拉斯laplace变换。
[0032]
本发明实施例的有益效果包括:解决了工业应用场景中难以高质量成像的问题,通过预先记录光斑在图像不同位置的正焦点,构建光斑与正焦点对应查找表;然后在实际应用中通过光斑与正焦点对应查找表实时驱动调焦马达进行调焦,避免了耗时的清晰度计算,另外,实时调焦过程中无需计算图像的清晰度,更有效的保证了实时性。
附图说明
[0033]
图1为本发明实施例的视觉系统示意图;
[0034]
图2为本发明实施例的基于光斑跟踪的相机调焦方法示意图;
具体实施方式
[0035]
下面结合附图1、图2,对本发明实施例提供的一种基于光斑跟踪的相机调焦方法的具体实施方式进行详细地说明。
[0036]
如图1所示,视觉系统包括激光器、调焦镜头和图像传感器cmos构成的成像单元、调焦马达、计算与控制单元等。激光器与成像单元具有一定的夹角,当物体前后移动时,图像上的光斑就会在图像上左右移动,计算与控制单元跟踪光斑在图像上的位置,实时驱动调焦马达,进行自动调焦。
[0037]
如图2所示,本发明实施例提供的一种基于光斑跟踪的相机调焦方法,包括:
[0038]
步骤a:构建正焦点对应查找表,在离线状态下,预先记录光斑在图像不同位置的正焦点,构建光斑质心位置与正焦点对应查找表;图像包含:光斑信息,用于跟踪物体距离镜头的远近变化情况,从而构建与正焦点对应的查找表;纹理信息,用于清晰度的计算;
[0039]
步骤b:实时调焦,在在线状态下,将待测物体置于相机的视野内,驱动调焦马达从起始点开始每次运动一个步长step1到最大行程处,并在该过程中采集图片,对采集的每一幅图片获取正焦点的光斑的质心(xc,yc),然后遍历正焦点对应查找表,寻找与光斑质心最近的点,并将其记为参考点r(x,y,a);其中,xc为光斑的质心的水平方向的坐标,yc为光斑的质心的竖直方向的坐标,参考点r(x,y,a)的x、y、a三个分量,其中x为水平分量,y为竖直分量,a为调焦马达的位置;
[0040]
步骤c:对实时出现的待测物体进行图片采集,对采集的每一幅待测物体图片计算正焦点的光斑质心(xc,yc),计算xc与参考点r的x分量的差的绝对值d=abs(x
c-x),当该绝对值d大于步长step1时,遍历光斑与正焦点对应查找表,寻找与当前光斑质心(xc,yc)最近的点,获取与之对应的的调焦马达行程,将调焦马达驱动至该行程,实现相机的实时调焦;
[0041]
步骤d:当收到停止信号,退出实时调焦;否则,进入步骤c。
[0042]
较佳的方式,步骤a具体包括:
[0043]
a11:搭建离线定焦平台,视觉系统置于运动平台的前方,并将物体置于运动平台上,运动平台的运动方向平行于成像单元的光轴,调节光源亮度和运动平台高度实现正常成像,进入步骤s1-1;
[0044]
s1-1:将调焦马达的行程置零,驱动运动平台由远及近运动,寻找正焦点,运动平台每次步进距离step1为成像单元景深的1/3;记录最大清晰度的值d1
max
,其初始值置零,进入步骤s1-2;
[0045]
s1-2:采集图片,计算图像的清晰度d,并判断图像的清晰度d是否大于d1
max
,如果是则更新最大清晰度d1
max
=d和运动平台的位置值a1,进入步骤s1-3;
[0046]
s1-3:观测运动平台是否运动到了最近端,如果是,则进入s1-4;如果否,则驱动运动平台前进step1,返回步骤s1-2;
[0047]
s1-4:将调焦马达的行程置于最大行程,驱动运动平台由远及近运动;d2
max
用于记录最大清晰度的值,其初始值为零,进入步骤s1-5;
[0048]
s1-5:计算图像的清晰度d,并判断图像的清晰度d是否大于d2
max
,如果是则更新最大清晰度d2
max
=d和运动平台的位置值a2,进入步骤s1-6;
[0049]
s1-6:观测运动平台是否运动到了最近端,如果是则进入s2;如果否则驱动运动平台前进step1,返回步骤s1-5;
[0050]
a12:创建光斑与正焦点对应查找表:将运动平台的行程范围l=a2-a1进行m=1+round(l/step1)等分,其中round()为四舍五入运算,创建光斑与正焦点对应查找表,光斑与正焦点对应查找表包含m个元素,每个元素包含:在正焦点时调焦马达的行程和光斑中心的位置;将运动平台驱动到a1位置,进入步骤s2-1;
[0051]
s2-1:驱动运动平台马达从起始点运动到最大行程处,并在该过程中采集图片,并对每张图片进行计算:
[0052]
a)对每张图片的光斑信息进行二值化,再提取光斑,最后计算光斑的质心(xc,yc),质心的计算公式如下:
[0053][0054][0055][0056]
其中,n为光斑包含的像素数量,p、q、i均为非负整数,x和y为每个像素点横坐标和纵坐标,f(x,y)为坐标(x,y)对应的像素值;
[0057]
b)根据每张图片的纹理信息计算清晰度d,寻找最大清晰度d
max
,即正焦点,并在光斑与正焦点对应查找表中记录此时光斑的质心(xc,yc)和运动平台马达的行程a,进入步骤s2-2;
[0058]
s2-2:观测运动平台是否运动到了a2端,如果是,则完成光斑与正焦点对应查找表的构建;如果否,则驱动运动平台前进step1,返回步骤s2-1。
[0059]
较佳的方式,s2-1中的对每张图片的光斑信息进行二值化为单阈值法或ostu二值化,提取光斑为blob运算。
[0060]
较佳的方式,s2-1中的根据每张图片的纹理信息计算清晰度d,具体为使用空域方法通过统计图像梯度幅值方法实现。
[0061]
较佳的方式,统计图像梯度幅值方法具体为sobel变换或拉普拉斯laplace变换。
[0062]
本发明实施例的方法,解决了工业应用场景中难以高质量成像的问题,通过预先记录光斑在图像不同位置的正焦点,构建光斑与正焦点对应查找表;然后在实际应用中通过光斑与正焦点对应查找表实时驱动调焦马达进行调焦,避免了耗时的清晰度计算,另外,实时调焦过程中无需计算图像的清晰度,更有效的保证了实时性。
[0063]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1