驾驶行为的监控装置、驾驶行为的评估和保费的确定方法与流程
1.本发明涉及计算机技术领域,尤其涉及一种驾驶行为的监控装置、驾驶行为的评估和保费的确定方法。
背景技术:
2.目前,随着社会的发展和人们生活水平的提高,汽车在人们生活中越来越普通,车险业务也成为了各保险公司重点发展的业务领域。在相关的技术中,保险公司主要是根据被保险人的历史理赔金额或者理赔次数,对保费金额进行调整,也就是说,驾驶行为良好,赔款次数少或零赔款的车辆,可以享受到更大幅度得保费折扣优惠。
3.然而,根据理赔数据调整保费,可能导致很多交通事故发生后,被保险人私自处理,不通过保险进行理赔,也即没有对不良驾驶行为向保险公司进行充分的披露,导致保险公司对驾驶员的驾驶行为的评估失真,从而风险控制失败。
技术实现要素:
4.本发明要解决的技术问题是为了克服现有技术中被保险人私自处理,没有对不良驾驶行为向保险公司进行充分的披露的缺陷,提供一种驾驶行为的监控装置、驾驶行为的评估和保费的确定方法。
5.本发明是通过下述技术方案来解决上述技术问题:
6.本发明提供一种驾驶行为的监控装置,包括:控制模块、通信模块、电源模块和定位模块;
7.所述控制模块分别与所述通信模块、所述电源模块和所述定位模块电连接,所述通信模块与外部服务器通信连接;
8.所述通信模块用于在所述控制模块和所述外部服务器之间传递数据;
9.所述电源模块用于为所述控制模块、所述通信模块和所述定位模块供电;
10.所述定位模块用于获得当前的位置信息,并将所述位置信息发送至所述控制模块;
11.所述控制模块用于将所述位置信息发送至所述外部服务器。
12.较佳地,所述监控装置还包括:传感器模块;
13.所述传感器模块与所述控制模块电连接;
14.所述传感器模块用于采集运动数据,并将所述运动数据发送至所述控制模块;
15.所述控制模块还用于根据所述运动数据生成不良驾驶行为数据,并将所述不良驾驶行为数据发送至所述外部服务器。
16.较佳地,所述运动数据包括加速度数据,所述不良驾驶行为数据包括:急加速数据、急减速数据和急停数据;
17.所述传感器模块包括:三轴加速度传感器;
18.所述三轴加速度传感器与所述控制模块电连接;
19.所述三轴加速度传感器用于采集所述加速度数据,并将所述加速度数据发送至所述控制模块;
20.所述控制模块还用于根据所述加速度数据生成所述急加速数据、所述急减速数据和所述急停数据。
21.较佳地,所述运动数据还包括角速度数据,所述不良驾驶行为数据还包括:急转弯数据和连续变道数据;
22.所述传感器模块还包括:三轴角速度传感器;
23.所述三轴角速度传感器用于采集所述角速度数据,并将所述角速度数据发送至所述控制模块;
24.所述控制模块还用于根据所述角速度数据生成所述急转弯数据和所述连续变道数据。
25.较佳地,所述控制模块还用于根据所述加速度数据得到车辆动静状态,若所述车辆动静状态表征车辆处于移动状态,则控制所述定位模块处于连续追踪模式;若所述车辆动静状态表征车辆处于静止状态,则控制所述定位模块处于定时开启模式。
26.较佳地,所述电源模块还用于从外部车辆的点烟器接口输入电能;
27.所述电源模块包括:外接电源单元和/或内置电源单元;
28.所述外接电源单元用于从所述点烟器接口输入电能并降压后作为所述电源模块的输出电能;
29.所述内置电源单元用于提供电能作为所述电源模块的输出电能。
30.较佳地,在所述电源模块包括所述外接电源单元和所述内置电源单元时,所述电源模块还包括电源切换单元;
31.所述电源切换单元的输入端分别与所述外接电源单元和所述内置电源单元的输出端电连接;
32.所述电源切换单元的输出端分别与所述控制模块、所述通信模块和所述定位模块电连接;
33.所述外接电源单元用于从所述点烟器接口输入电能并降压后传输至所述电源切换单元;
34.所述内置电源单元用于向所述电源切换单元供电;
35.所述电源切换单元用于在所述外接电源单元从所述点烟器接口输入电能时,将所述外接电源单元输入的电能输出;在所述外接电源单元不从所述点烟器接口输入电能时,将所述内置电源单元的电能输出。
36.较佳地,在所述电源模块包括所述外接电源单元时,所述监控装置还包括:插拔检测模块;
37.所述插拔检测模块与所述控制模块电连接;
38.所述插拔检测模块用于采集所述电源模块与所述点烟器接口的电连接的连接信号,并将所述连接信号发送至所述控制模块;
39.所述控制模块还用于根据所述连接信号得到所述监控装置的插拔状态,并将所述插拔状态发送至所述外部服务器。
40.本发明还提供一种驾驶行为的评估方法,利用前述的驾驶行为的监控装置实现,
所述评估方法包括:
41.获取所述监控装置发送的定位信息;
42.基于所述定位信息生成行车路线异常数据;
43.基于所述行车路线异常数据和预设的评分参考数据调整驾驶员的行为分数,以作为所述驾驶员的驾驶行为的评分结果。
44.较佳地,所述评估方法还包括:
45.获取所述监控装置发送的不良驾驶行为数据;
46.所述基于所述行车路线异常数据和预设的评分参考数据调整驾驶员的行为分数,包括:
47.基于所述行车路线异常数据、所述不良驾驶行为数据和所述评分参考数据调整所述行为分数。
48.较佳地,所述评估方法还包括:
49.获取所述监控装置发送的插拔状态;
50.所述基于所述行车路线异常数据、所述不良驾驶行为数据和所述评分参考数据调整所述行为分数,包括:
51.基于所述行车路线异常数据、所述不良驾驶行为数据、所述插拔状态和所述评分参考数据调整所述行为分数。
52.较佳地,所述行为分数包括:里程分数、不良行为分数和插拔分数;
53.所述行车路线异常数据包括预设的评估周期内的行驶总里程,所述不良驾驶行为数据包括所述评估周期内的不良行为总次数,所述插拔状态包括所述评估周期内的插拔总次数;
54.所述基于所述行车路线异常数据、所述不良驾驶行为数据、所述插拔状态和所述评分参考数据调整所述行为分数,包括:
55.基于所述行驶总里程、预设的第一基础分以及所述评分参考数据中对应的加分值和减分值计算得到所述里程分数;
56.基于所述不良行为总次数、预设的第二基础分以及所述评分参考数据中对应的加分值和减分值计算得到所述不良行为分数;
57.基于所述插拔总次数、预设的第三基础分以及所述评分参考数据中对应的加分值和减分值计算得到所述插拔分数。
58.本发明还提供一种保费的确定方法,包括:
59.获取车辆的当期保费;
60.获取所述车辆的驾驶员的行为分数;其中,所述行为分数是利用前述的驾驶行为的评估方法得到的;
61.根据所述行为分数确定保费更正系数;
62.将所述当期保费乘以所述保费更正系数得到下期保费。
63.较佳地,所述行为分数包括:里程分数、不良行为分数和插拔分数;
64.获取所述里程分数与第一修正系数的第一对应关系、所述不良行为分数与第二修正系数的第二对应关系以及所述插拔分数与第三修正系数的第三对应关系;
65.所述根据所述行为分数确定保费更正系数,包括:
66.基于所述里程分数和所述第一对应关系确定所述第一修正系数;
67.基于所述不良行为分数和所述第二对应关系确定所述第二修正系数;
68.基于所述插拔分数和所述第三对应关系确定所述第三修正系数;
69.确定所述保费更正系数为所述第一修正系数、所述第二修正系数和所述第三修正系数的乘积。
70.本发明的积极进步效果在于:通过插在车辆的点烟器接口的监控装置来监控驾驶员的驾驶行为,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,提高了评估的精准性和有效性,提高了风险控制的成功率。
附图说明
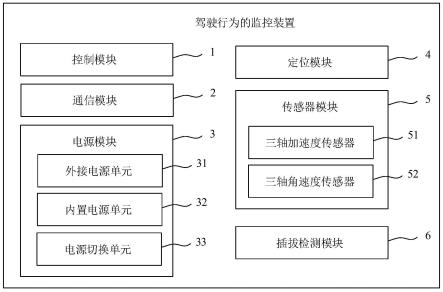
71.图1为本发明的实施例1的驾驶行为的监控装置的模块示意图。
72.图2为本发明的实施例2的驾驶行为的评估方法的流程图。
73.图3为本发明的实施例2的驾驶行为的评估方法的一具体实施方式的流程图。
74.图4为本发明的实施例2的驾驶行为的评估方法的另一具体实施方式的流程图。
75.图5为本发明的实施例2的驾驶行为的评估方法中的步骤s1311的一具体实施方式的流程图。
76.图6为本发明的实施例3的保费的确定方法的流程图。
77.图7为本发明的实施例3的保费的确定方法中的步骤s23的一具体实施方式的流程图。
具体实施方式
78.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
79.实施例1
80.本实施例提供一种驾驶行为的监控装置,参照图1,监控装置包括:控制模块1、通信模块2、电源模块3和定位模块4。
81.控制模块1分别与通信模块2、电源模块3和定位模块4电连接,通信模块2与外部服务器通信连接。
82.通信模块2用于在控制模块1和外部服务器之间传递数据。
83.电源模块3用于为控制模块1、通信模块2和定位模块4供电。
84.定位模块4用于获得当前的位置信息,并将位置信息发送至控制模块1。
85.控制模块1用于将位置信息发送至外部服务器。
86.其中,控制模块1可以采用mcu(micro controller unit,微控制单元),接收各种数据并进行处理以及存储。
87.通信模块2可以采用物联网通信、2g(2nd-generation,第二代移动通信技术)通信、3g(3rd-generation,第三代移动通信技术)通信、4g(4th-generation,第四代移动通信技术)通信和5g(5th-generation,第五代移动通信技术)通信中的一种或多种。例如,保险公司可以通过服务器下发相应配置到监控装置,进行车辆上报配置;监控装置上报数据到服务器端,进行数据采集。
88.优选地,通信模块2可以采用sigfox(一种物联网通信)通信方式。sigfox通信利用了超窄带技术。传输功耗水平非常低,而仍然能维持一个稳定的数据连接,sigfox的传输距离可达50公里,在lpwan(物联网低功耗广域)技术中属于传输距离比较长的,且传输成本低。
89.定位模块4可以采用gps(global positioning system,全球定位系统)定位系统、北斗定位系统、2g通信系统辅助定位、3g通信系统辅助定位、4g通信系统辅助定位、5g通信系统辅助定位以及wi-fi(wireless fidelity,无线上网)辅助定位中的一种或多种。
90.监控装置采用与点烟器匹配的硬件结构,比如:外壳主体为柱状体,外壳主体的一端设有插头,插头的正极和负极分别与车辆的点烟器接口的正极和负极电连接。点烟器式的监控装置使用方便快捷,且不用破坏车辆结构,插在车辆点烟器处获取电能即可工作。
91.有些车辆在点火的状态下,点烟器才供电,针对这种车辆,车辆点火之后,定位模块4可以立即开始工作,获得当前的位置信息后,上报外部服务器车辆的实时位置。
92.可以基于定位信息生成行车路线异常数据,再基于行车路线异常数据来评估驾驶员的不良驾驶行为。
93.监控装置可以在每次行程结束之后上报单次里程,也可以在每次行程开始之前或每天定时上报总里程。
94.本实施例通过插在车辆的点烟器接口的监控装置来监控驾驶员的驾驶行为,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,提高了评估的精准性和有效性,提高了风险控制的成功率。
95.具体实施时,监控装置还包括:传感器模块5。
96.传感器模块5与控制模块1电连接。
97.传感器模块5用于采集运动数据,并将运动数据发送至控制模块1。
98.控制模块1还用于根据运动数据生成不良驾驶行为数据,并将不良驾驶行为数据发送至外部服务器。
99.本实施例中,通过传感器模块采集运动数据,根据运动数据生成不良驾驶行为数据,不良驾驶行为数据真实可靠、准确性高,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,进一步提高了评估的精准性和有效性,提高了风险控制的成功率。
100.具体实施时,运动数据包括加速度数据,不良驾驶行为数据包括:急加速数据、急减速数据和急停数据。
101.传感器模块5包括:三轴加速度传感器51。
102.三轴加速度传感器51与控制模块1电连接。
103.三轴加速度传感器51用于采集加速度数据,并将加速度数据发送至控制模块1。
104.控制模块1还用于根据加速度数据生成急加速数据、急减速数据和急停数据。
105.其中,急加速数据表征车辆的迅急加速情况,急减速数据表征车辆的迅急减速情况,急停数据表征车辆的迅急停车情况。这些快速改变车辆运动状态的情况容易导致事故的发生,从而造成人员伤害和财产损失。
106.具体地,可以按照以下指标来判断是否为急加速数据、急减速数据和急停数据。
107.急加速数据:加速度值在增加,加速度值处于第一加速度区间,且持续时间大于等
于第一时长。例如,第一加速度区间可以为1.11-2.22米/秒2,第一时长可以为2秒。
108.急减速数据:加速度值在减少,加速度值处于第二加速度区间,且持续时间大于等于第二时长。例如,第二加速度区间可以为1.11-2.22米/秒2,第二时长可以为2秒。
109.急停数据:加速度值大于等于第一加速度阈值,且持续时间大于等于第三时长。例如,第一加速度阈值可以为3米/秒2,第三时长可以为2秒。
110.可以根据实际需要设置第一加速度区间、第二加速度区间、第一加速度阈值、第一时长、第二时长和第三时长。
111.本实施例中,根据三轴加速度传感器采集的加速度数据,生成急加速数据、急减速数据和急停数据,对急加速、急减速和急停这三种不良驾驶行为进行监控,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,进一步提高了评估的精准性和有效性,提高了风险控制的成功率。
112.具体实施时,运动数据还包括角速度数据,不良驾驶行为数据还包括:急转弯数据和连续变道数据。
113.传感器模块5还包括:三轴角速度传感器52。
114.三轴角速度传感器52用于采集角速度数据,并将角速度数据发送至控制模块1。
115.控制模块1还用于根据角速度数据生成急转弯数据和连续变道数据。
116.其中,急转弯数据表征车辆的迅急转弯情况,连续变道数据表征车辆的短时间内连续多次变道情况。这些快速改变车辆运动状态的情况容易导致事故的发生,从而造成人员伤害和财产损失。
117.具体地,可以按照以下指标来判断是否为急转弯数据和连续变道数据。
118.急转弯数据:角速度值大于等于第一角速度阈值,或第一时段内行驶方向角度差绝对值大于角度差阈值。例如,第一角速度阈值可以为10度/秒,第一时段可以为从任一时间点开始的5秒内,角度差阈值可以为35度。
119.连续变道数据:第二时段内累计变化角度大于等于第一累计变化角度阈值,累计变化角度大于等于角度阈值的持续时间大于第四时长,并且第三时段内累计变化角度小于第二累计变化角度阈值。例如,第二时段可以为从时间点a(时间点a可以为任一时间点)开始的5秒内,第一累计变化角度阈值可以为45度,第四时长可以为10秒,第三时段可以为从时间点a开始的30秒内,第二累计变化角度阈值可以为5度;即,从时间点a开始的5秒内累计变化角度大于等于45度,累计变化角度大于等于45度的持续时间大于10秒,并且从时间点a开始的30秒内累计变化角度小于5度,表示发生了一次连续变道。
120.可以根据实际需要设置第一角速度阈值、角度差阈值、第一时段、第二时段、第三时段、第一累计变化角度阈值、第二累计变化角度阈值和第四时长。
121.本实施例中,根据三轴角速度传感器采集的角速度数据,生成急转弯数据和连续变道数据,对急转弯和连续变道这两种不良驾驶行为进行监控,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,进一步提高了评估的精准性和有效性,提高了风险控制的成功率。
122.具体实施时,控制模块1还用于根据加速度数据得到车辆动静状态,若车辆动静状态表征车辆处于移动状态,则控制定位模块4处于连续追踪模式;若车辆动静状态表征车辆处于静止状态,则控制定位模块4处于定时开启模式。
123.其中,有些车辆在熄火的状态下,点烟器也可以供电。在车辆处于熄火状态下驾驶行为的监控装置依然可以得到供电的情况下,可以通过三轴加速度传感器采集的加速度数据得到车辆动静状态,根据得到车辆动静状态来判断车辆是否在行驶。
124.具体地,加速度数据连续很快变换表征车辆处于移动状态,则控制定位模块4处于连续追踪模式,以获得车辆的精准位置;加速度数据不连续很快变换表征车辆处于静止状态,则控制定位模块4处于定时开启模式,以节省耗电并且获得车辆的精准位置。
125.加速度数据连续很快变换,即为第四时段内加速度差的绝对值大于加速度差阈值。例如,第四时段可以为从任一时间点开始的1秒内,加速度差阈值可以为0.01米/秒2。
126.本实施例中,通过加速度数据来得到车辆动静状态,进而根据车辆动静状态控制加速度数据的工作模式,实现在不影响获取车辆的精准位置的基础上节省耗电。
127.具体实施时,电源模块3包括:外接电源单元31和内置电源单元32中的至少一种。
128.外接电源单元31用于从点烟器接口输入电能并降压后作为电源模块3的输出电能;
129.内置电源单元32用于提供电能作为电源模块3的输出电能。
130.其中,外接电源单元31可以是电压适配器,例如直流降压器。内置电源单元32可以包括蓄电池,将蓄电池的输出电能作为电源模块3的输出电能。
131.本实施例中,点烟器式的监控装置使用方便快捷,且不用破坏车辆结构,通过插在车辆的点烟器接口的监控装置来监控驾驶员的驾驶行为,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,提高了评估的精准性和有效性,提高了风险控制的成功率。
132.具体实施时,在电源模块3包括外接电源单元31和内置电源单元32时,电源模块3还包括:电源切换单元33。
133.电源切换单元33的输入端分别与外接电源单元31和内置电源单元32的输出端电连接。
134.电源切换单元33的输出端分别与控制模块1、通信模块2和定位模块4电连接。
135.外接电源单元31用于从点烟器接口输入电能并降压后传输至电源切换单元33。
136.内置电源单元32用于向电源切换单元33供电。
137.电源切换单元33用于在外接电源单元31从点烟器接口输入电能时,将外接电源单元31输入的电能输出。在外接电源单元31不从点烟器接口输入电能时,将内置电源单元32的电能输出。
138.其中,内置电源单元32用作备份电源。在监控装置被拔出后以及在车辆熄火无法供电时,电源切换单元能够无缝切换为内置电源单元的电能供电,以避免监控装置不能及时上报数据。在监控装置插入车辆的点烟器接口时,电源切换单元能够无缝切换为外接电源单元的接入的电能供电。
139.本实施例中,点烟器式的监控装置使用方便快捷,且不用破坏车辆结构,通过插在车辆的点烟器接口的监控装置来监控驾驶员的驾驶行为,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,提高了评估的精准性和有效性,提高了风险控制的成功率;通过内置电源单元保障无外接电源时的供电。
140.具体实施时,监控装置还包括:插拔检测模块6。
141.插拔检测模块6与控制模块1电连接。
142.插拔检测模块6用于采集电源模块3与点烟器接口的电连接的连接信号,并将连接信号发送至控制模块1。
143.控制模块1还用于根据连接信号得到监控装置的插拔状态,并将插拔状态发送至外部服务器。
144.其中,监控装置插入处理的点烟器接口后不应该未经允许私自拔出。有些驾驶员可能会拔出监控装置以逃避对驾驶行为的监控。为了应对这种情况,通过插拔检测模块6检测监控装置的插拔状态。若监控装置处于拔出状态,则可以将驾驶员的自行拔出行为记录为违规操作,同时可以通过语音、短信、微信等方式提示驾驶员将监控装置插回点烟器接口。
145.本实施例中,通过插拔检测模块监控驾驶员的插拔该监控装置的行为,避免驾驶员私自拔下监控装置。
146.本实施例中,点烟器式的监控装置使用方便快捷,且不用破坏车辆结构,通过插在车辆的点烟器接口的监控装置来监控驾驶员的驾驶行为,实现了对不良驾驶行为进行充分的披露,以真实准确的数据支撑对驾驶员的驾驶行为的评估,提高了评估的精准性和有效性,提高了风险控制的成功率;通过内置电源单元保障无外接电源时的供电;通过插拔检测模块检测监控装置的插拔状态,避免驾驶员私自拔下监控装置。
147.实施例2
148.本实施例提供一种驾驶行为的评估方法,利用实施例1中的驾驶行为的监控装置实现。参照图2,评估方法包括:
149.s11、获取监控装置发送的定位信息。
150.s12、基于定位信息生成行车路线异常数据。
151.s13、基于行车路线异常数据和预设的评分参考数据调整驾驶员的行为分数,以作为驾驶员的驾驶行为的评分结果。
152.其中,行车路线异常数据可以是逆向行驶、异常停车、超速行驶等数据。评分参考数据可以是表征符合交通法规的驾驶行为的数据,例如:路线允许的行驶方向、道路限速要求、允许停车时长,允许停车区域等。
153.行车路线异常数据会降低驾驶员的行为分数,频次越高降低分数越多。
154.保险公司可以将驾驶员的行为分数应用于计算该驾驶员对应的车辆保费。行为分数越高,则车辆保费越低;行为分数越低,则车辆保费越高。
155.具体地,可以根据当年保费周期内不良驾驶行为得到驾驶员的行为分数,基于行为分数得到保费更正系数,在当年车辆保费的基础上结合保费更正系数计算得到下一年的车辆保费。
156.本实施例通过监控装置发送的定位信息生成行车路线异常数据,基于行车路线异常数据和预设的评分参考数据调整驾驶员的行为分数,调整后的行为分数为驾驶员的驾驶行为的评分结果,该评分结果准确地反映了驾驶员的驾驶行为的合规程度,提高了评分结果的可信度,借助评分参考数据能够更加客观地进行评价。
157.具体实施时,参照图3,评估方法还包括:
158.s14、获取监控装置发送的不良驾驶行为数据。
159.步骤s13包括:
160.s131、基于行车路线异常数据、不良驾驶行为数据和评分参考数据调整行为分数。
161.其中,步骤s14的次序可以在步骤s11之前,即步骤执行次序依次为:s14、s11、s12和s131。
162.不良驾驶行为数据包括但不限于急加速数据、急减速数据、急停数据、急转弯数据和连续变道数据。不良驾驶行为数据会降低驾驶员的行为分数,频次越高降低分数越多。
163.本实施例中增加不良驾驶行为数据作为行为分数的减分项,扩大了调整驾驶员的行为分数的考量项目,调整后的行为分数为驾驶员的驾驶行为的评分结果,该评分结果更为准确地反映了驾驶员的驾驶行为的合规程度,进一步提高了评分结果的可信度,借助评分参考数据能够更加客观地进行评价。
164.具体实施时,参照图4,评估方法还包括:
165.s15、获取监控装置发送的插拔状态。
166.步骤s131包括:
167.s1311、基于行车路线异常数据、不良驾驶行为数据、插拔状态和评分参考数据调整行为分数。
168.其中,不限定步骤s11、s14和s15之间的先后次序,步骤s11、s14和s15的次序可以互换,步骤s12始终在步骤s11之后。
169.根据插拔状态可以得到监控装置的拔出次数。拔出次数越多,则行为分数越低;拔出次数越少,则行为分数越高,如果拔出次数为零,还可以上调行为分数。
170.本实施例中增加插拔状态作为行为分数的加减分项,扩大了调整驾驶员的行为分数的考量项目,调整后的行为分数为驾驶员的驾驶行为的评分结果,该评分结果更为准确地反映了驾驶员的驾驶行为的合规程度,进一步提高了评分结果的可信度,借助评分参考数据能够更加客观地进行评价。
171.具体实施时,行为分数包括:里程分数、不良行为分数和插拔分数。
172.行车路线异常数据包括预设的评估周期内的行驶总里程,不良驾驶行为数据包括评估周期内的不良行为总次数,插拔状态包括评估周期内的插拔总次数。
173.参照图5,步骤s1311包括:
174.s13111、基于行驶总里程、预设的第一基础分以及评分参考数据中对应的折算系数计算得到里程分数。
175.s13112、基于不良行为总次数、预设的第二基础分以及评分参考数据中对应的加分值和减分值计算得到不良行为分数。
176.s13113、基于插拔总次数、预设的第三基础分以及评分参考数据中对应的加分值和减分值计算得到插拔分数。
177.其中,评估周期可以为一个保费周期。不良行为总次数可以为评估周期内生成急加速数据、急减速数据、急停数据、急转弯数据和连续变道数据的总次数。
178.评分参考数据可以包括:行驶总里程小于等于第一里程时对应的折算系数(例如为10/9)、行驶总里程大于第一里程且小于第二里程时对应的折算系数(折算系数=第一里程/行驶总里程)、行驶总里程大于等于第二里程时对应的折算系数(例如0.5)、不良行为总次数小于等于第一预设次数时对应的加分值、不良行为总次数大于第一预设次数且小于等
于第二预设次数(例如为第一预设次数的2倍)时对应的减分值、不良行为总次数大于第二预设次数时对应的减分值、插拔总次数为零时的加分值以及单次插拔对应的减分值。其中,第一里程小于第二里程,第一里程和第二里程是由车辆的历史里程和使用年限确定的,第一预设次数小于第二预设次数。
179.里程分数=第一基础分*折算系数。
180.不良行为分数=第二基础分+∑对应的加分值-∑对应的减分值。
181.插拔分数=第三基础分+∑对应的加分值-∑对应的减分值=第三基础分+∑对应的加分值-单次插拔对应的减分值*插拔总次数。
182.可以根据实际需要,设置第一基础分、第二基础分、第三基础分、折算系数、第一预设次数、第二预设次数、各个加分值和减分值。
183.示例1:
184.假设第一基础分、第二基础分和第三基础分均为10分,行驶总里程为19000公里,第一里程为15000公里,第二里程为26000公里,行驶总里程小于等于第一里程时对应的折算系数为1.1,行驶总里程大于第一里程且小于第二里程时对应的折算系数为0.79(第一里程/行驶总里程15000/19000=0.79),行驶总里程大于等于第二里程时对应的折算系数为0.5,不良行为总次数为5次,第一预设次数为10次,第二预设次数为20次,不良行为总次数小于等于第一预设次数时对应的加分值为2分,不良行为总次数大于第一预设次数且小于等于第二预设次数时对应的减分值为1分,插拔总次数为1次,单次插拔对应的减分值为1分。
185.里程分数=第一基础分*折算系数=10*0.79=7.9分。
186.不良行为分数=第二基础分+∑对应的加分值-∑对应的减分值=10+2-0=12分。
187.插拔分数=第三基础分+∑对应的加分值-∑对应的减分值=10+0-1=9分。
188.本实施例中,通过里程分数、不良行为分数和插拔分数,进一步细化了驾驶员的驾驶行为的评分结果,该评分结果更为准确地反映了驾驶员的驾驶行为的合规程度,进一步提高了评分结果的可信度,借助评分参考数据能够更加客观地进行评价。
189.实施例3
190.本实施例提供一种保费的确定方法,参照图6,确定方法包括:
191.s21、获取车辆的当期保费。
192.s22、获取车辆的驾驶员的行为分数。其中,行为分数是利用实施例2中的驾驶行为的评估方法得到的。
193.s23、根据行为分数确定保费更正系数。
194.s24、将当期保费乘以保费更正系数得到下期保费。
195.其中,车辆的保费周期通常为一年,在此情况下,当期保费即为当年保费,下期保费即为下年保费。
196.车辆的首期保费可以按照以下方法来确定:
197.首先,获取车辆的历史里程和使用年限,获取车辆的历史保费清单和驾驶员的历史违规信息。然后,根据历史保费清单和驾驶员的历史违规信息,生成基础保费。然后,按照预设的首期保费确定策略,基于历史里程和使用年限确定首期保费更正系数。最后,将基础保费乘以首期保费更正系数得到首期保费。
198.本实施例中,根据行为分数确定保费更正系数,通过保费更正系数对当期保费进行调整得到下期保费,准确地反映了驾驶员的驾驶行为的合规程度以及与合规程度负相关的风险程度,合理地维护了驾驶员与保险公司之间的风险平衡。
199.具体实施时,行为分数包括:里程分数、不良行为分数和插拔分数。
200.获取里程分数与第一修正系数的第一对应关系、不良行为分数与第二修正系数的第二对应关系以及插拔分数与第三修正系数的第三对应关系。
201.参照图7,步骤s23包括:
202.s231、基于里程分数和第一对应关系确定第一修正系数。
203.s232、基于不良行为分数和第二对应关系确定第二修正系数。
204.s233、基于插拔分数和第三对应关系确定第三修正系数。
205.s234、确定保费更正系数为第一修正系数、第二修正系数和第三修正系数的乘积。
206.其中,第一对应关系可以包括:里程分数大于等于预设的第一基础分时,第一修正系数确定为0.9,对应于实施例2中行驶总里程小于等于第一里程的情况;里程分数小于第一基础分且大于第一基础分的一半时,第一修正系数确定为:第一基础分/里程分数,对应于实施例2中行驶总里程大于第一里程且小于第二里程的情况;里程分数小于等于第一基础分的一半时,第一修正系数确定为2,对应于实施例2中行驶总里程大于等于第二里程的情况。
207.第二对应关系可以包括:不良行为分数大于等于预设的第二基础分时,第二修正系数确定为0.9,对应于实施例2中不良行为总次数小于等于第一预设次数的情况;不良行为分数小于预设的第二基础分时且大于等于第一预设参考分时,第二修正系数确定为1.2,第一预设参考分小于第二基础分,第一预设参考分可以等于实施例2中不良行为总次数大于第一预设次数且小于等于第二预设次数的情况下的不良行为分数;不良行为分数小于第一预设参考分时,第二修正系数确定为1.5,对应于实施例2中不良行为总次数大于第二预设次数的情况。
208.第三对应关系可以包括:插拔分数大于等于预设的第三基础分时,第三修正系数确定为0.9;插拔分数小于第三基础分时,第三修正系数确定为:1+0.1*(第三基础分-插拔分数)/第二预设参考分,第二预设参考分可以等于实施例2中单次插拔对应的减分值(此时,第三修正系数即为:1+0.1*插拔总次数)。
209.保费更正系数=第一修正系数*第二修正系数*第三修正系数。
210.下期保费=当期保费*保费更正系数。
211.可以根据实际需要,设置第一预设参考分和第二预设参考分。
212.示例:以实施例2中示例1的数据为例,设置第二预设参考分为1分(等于示例中单次插拔对应的减分值),假设车辆的当期保费为5000元。
213.那么,里程分数为7.9分,里程分数小于第一基础分(10分)且大于第一基础分的一半(5分)时,第一修正系数确定为:第一基础分/里程分数=10/7.9=1.267。
214.不良行为分数为12分,不良行为分数大于等于第二基础分(10分),第二修正系数确定为0.9。
215.插拔分数为9分,插拔分数小于第三基础分(10分),第三修正系数确定为:1+0.1*(第三基础分-插拔分数)/第二预设参考分=1+0.1*(10-9)/1=1.1。
216.保费更正系数=第一修正系数*第二修正系数*第三修正系数=1.267*0.9*1.1=1.254(保留小数点后3位)。
217.下期保费=当期保费*保费更正系数=5000*1.254=6270元。
218.本实施例中,通过与里程分数、不良行为分数和插拔分数分别对应的第一修正系数、第二修正系数和第三修正系数,进一步细化了保费更正系数的确定结果,通过保费更正系数对当期保费进行调整得到下期保费,进一步准确地反映了驾驶员的驾驶行为的合规程度以及与合规程度负相关的风险程度,合理地维护了驾驶员与保险公司之间的风险平衡。
219.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1