GIS地图AR相机可视域计算及实时联动方法与流程
gis地图ar相机可视域计算及实时联动方法
技术领域
1.本发明涉及视频监控技术领域,尤其涉及gis地图ar相机可视域计算及实时联动方法。
背景技术:
2.近年来,社会治安得到很大提升,但随着监控设备的数量和种类日益增多,对城市管理提出了新挑战。如何直观地查看某个区域的监控设备覆盖范围,如何快速定位并调用某突发事件地区的监控设备,如何实现对不同类型的监控设备统一调用等一系列问题正困扰着我们的城市管理者,如何提高他们的工作效率,为智慧城市建设增光添彩已成为一个亟待解决的问题。
3.公开号为cn202551234u,发明名称为“一种基于gis地图镜头角度信息配置系统”的中国发明专利,公开了一种利用光端机、控制器、中心运算服务器来实现目标区域快速定位的办法。
4.公开号为cn103475858a,发明名称为“基于gis的云台3d预置功能的视频监控系统”的中国发明专利,公开了一种将目标坐标系传给云台摄像机,然后云台摄像机利用自身的空间位置定位能力、目标检测能力来将目标坐标系转换为云台摄像机自身的三维坐标体系,通过坐标变换和实际镜头的位置计算出云台旋转的角度,该技术对云台提出了较高的要求。
5.以上这几种技术存在实际操作过程复杂、对接周期长、接入成本高、接入监控设备种类少等不足,无法满足我们对多种类监控设备集群的低成本快速对接和灵活调用,对此我们提出了新的解决方案。
技术实现要素:
6.本发明的目的是为了提出gis地图ar相机可视域计算及实时联动方法。
7.为了实现上述目的,本发明采用了如下技术方案:
8.gis地图ar相机可视域计算及实时联动方法,所述实时联动方法包括以下步骤:
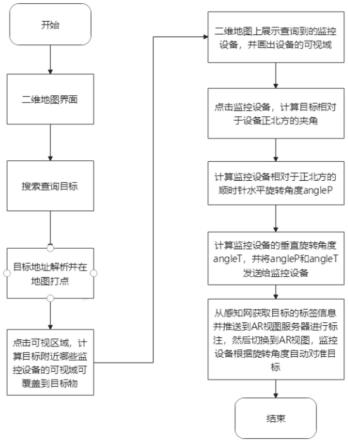
9.s1,进入二维地图界面选择目标并实时查看目标情况;
10.s2,搜寻查询目标并对目标进行解析;
11.s3,目标地址解析并在地图打点展示目标位置;
12.s4,点击可视区域,计算目标附近哪些监控设备的可视域可覆盖到目标物;
13.s5,二维地图上展示查询到的监控设备,并画出设备的可视域;
14.s6,点击监控设备,计算目标相对于设备正北方的夹角,计算监控设备相对于正北方的顺时针水平旋转角度anglep;
15.s7,计算监控设备的垂直旋转角度anglet,并将anglep和anglet 发送给监控设备并进行标注;
16.s8,从感知网获取目标的标签信息并推送到ar视图服务器进行标注,然后切换到
ar视图,监控设备根据旋转角度自动对准目标。
17.优选地,所述s1中进入二维地图界面选择目标并实时查看目标情况具体为:在二维地图界面中选择目标,然后点击监控设备进入ar视图中实时查看目标情况。
18.优选地,所述s2中搜寻查询目标并对目标进行解析具体为:管理者输入目标地址点击搜索,系统根据目标地址进行解析。
19.优选地,所述s3中目标地址解析并在地图打点展示目标位置具体为:根据s2中系统根据目标地址进行解析,得到对应的经纬度信息,二维地图上展示目标位置。
20.优选地,所述s4中点击可视区域,计算目标附近哪些监控设备的可视域可覆盖到目标物,具体为:鼠标点击可视区域,后台计算目标附近的可用监控设备。
21.优选地,所述s4中鼠标点击可视区域,后台计算目标附近的可用监控设备具体为:
22.2)根据系统配置的查询范围x查出以目标b(lng,lat)为中心, x为半径的圆形区域内的监控设备集s;
23.2)遍历s,计算监控设备a和目标b之间的距离l,如果l小于 a的可视域,则将a加入结果集r。
24.优选地,所述s5中二维地图上展示查询到的监控设备,并画出设备的可视域具体为:在二维地图上对结果集r进行展示,对不同类型的监控设备显示不同的图例,并在地图图层上绘制出设备的可视域。
25.优选地,所述s6中点击监控设备,计算目标相对于设备正北方的夹角,计算监控设备相对于正北方的顺时针水平旋转角度anglep 具体为:鼠标选中某个可视域,点击ar视图,系统根据目标坐标b(lng,lat)和所选监控设备坐标a(lng,lat)计算出监控设备相对于正北方的顺时针水平旋转角度anglep,垂直旋转角度anglet,计算步骤如下:
26.3)根据目标和监控设备的经纬度算出对应的弧度;
27.4)将空间坐标a,b转化到同一平面坐标系下,并求出直线ab 与y轴的夹角α(α《90);
28.3)根据a、b的经纬度差,判断目标相对于监控设备在平面坐标系的哪个象限,然后算出顺时针水平旋转角度anglep;
29.4)通过监控设备a的安装高度h和a、b两点间的距离x计算垂直旋转角度anglet。
30.优选地,所述s7中计算监控设备的垂直旋转角度anglet,并将 anglep和anglet发送给监控设备并进行标注,具体为:将旋转角度 anglep和anglet按照设备的传输协议发送给设备,同时从感知网获取目标的标签信息并推送到ar视图服务器进行标注。
31.优选地,所述s8中从感知网获取目标的标签信息并推送到ar视图服务器进行标注,然后切换到ar视图,监控设备根据旋转角度自动对准目标具体为:设备根据给定的旋转角度旋转后,浏览器自动切换到ar视图,实时展示目标情况及对应目标的标签信息。
32.有益效果为:
33.本发明利用监控设备可相对初始位进行旋转给定角度这一基本能力,通过采集监控设备经纬度、可视域、接入协议、传输协议等基本信息,并统一监控设备初始位为正北方,然后计算目标坐标与监控设备坐标所在直线与正北方向的夹角,通过夹角和目标坐标相对监控设备坐标的位置算出监控设备相对正北方的顺时针水平旋转角度,通过监控设备的安装高度、监控设备和目标两点间的距离计算出垂直旋转角度,并将这两个角度传给监控设
备,达到快速定位目标的目的;本发明中的监控设备包含高空瞭望、球机、鹰眼等,本发明满足了对多种设备的快速接入和灵活调用。
附图说明
34.图1为本发明提出的gis地图ar相机可视域计算及实时联动方法的过程图;
35.图2为本发明提出的gis地图ar相机可视域计算及实时联动方法中后台计算目标附近的可用监控设备的过程图;
36.图3为本发明提出的gis地图ar相机可视域计算及实时联动方法中直线ab与y轴的夹角示意图;
37.图4为本发明提出的gis地图ar相机可视域计算及实时联动方法中顺时针水平旋转角度anglep计算图;
38.图5为本发明提出的gis地图ar相机可视域计算及实时联动方法中垂直旋转角度anglet计算图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
40.参照图1-5,gis地图ar相机可视域计算及实时联动方法,所述实时联动方法包括以下步骤:
41.s1,进入二维地图界面选择目标并实时查看目标情况;
42.s2,搜寻查询目标并对目标进行解析;
43.s3,目标地址解析并在地图打点展示目标位置;
44.s4,点击可视区域,计算目标附近哪些监控设备的可视域可覆盖到目标物;
45.s5,二维地图上展示查询到的监控设备,并画出设备的可视域;
46.s6,点击监控设备,计算目标相对于设备正北方的夹角,计算监控设备相对于正北方的顺时针水平旋转角度anglep;
47.s7,计算监控设备的垂直旋转角度anglet,并将anglep和anglet 发送给监控设备并进行标注;
48.s8,从感知网获取目标的标签信息并推送到ar视图服务器进行标注,然后切换到ar视图,监控设备根据旋转角度自动对准目标。
49.本发明中,所述s1中进入二维地图界面选择目标并实时查看目标情况具体为:在二维地图界面中选择目标,然后点击监控设备进入 ar视图中实时查看目标情况。
50.本发明中,所述s2中搜寻查询目标并对目标进行解析具体为:管理者输入目标地址点击搜索,系统根据目标地址进行解析。
51.本发明中,所述s3中目标地址解析并在地图打点展示目标位置具体为:根据s2中系统根据目标地址进行解析,得到对应的经纬度信息,二维地图上展示目标位置。
52.本发明中,所述s4中点击可视区域,计算目标附近哪些监控设备的可视域可覆盖到目标物,具体为:鼠标点击可视区域,后台计算目标附近的可用监控设备。
53.本发明中,所述s4中鼠标点击可视区域,后台计算目标附近的可用监控设备具体
为:
54.1)根据系统配置的查询范围x查出以目标b(lng,lat)为中心, x为半径的圆形区域内的监控设备集s;
55.2)遍历s,计算监控设备a和目标b之间的距离l,如果l小于 a的可视域,则将a加入结果集r。
56.本发明中,所述s5中二维地图上展示查询到的监控设备,并画出设备的可视域具体为:在二维地图上对结果集r进行展示,对不同类型的监控设备显示不同的图例,并在地图图层上绘制出设备的可视域。
57.本发明中,所述s6中点击监控设备,计算目标相对于设备正北方的夹角,计算监控设备相对于正北方的顺时针水平旋转角度anglep 具体为:鼠标选中某个可视域,点击ar视图,系统根据目标坐标 b(lng,lat)和所选监控设备坐标a(lng,lat)计算出监控设备相对于正北方的顺时针水平旋转角度anglep,垂直旋转角度anglet,计算步骤如下:
58.1)根据目标和监控设备的经纬度算出对应的弧度;具体公式为:
59.m_radlo=lng*math.pi/180
60.m_radla=lat*math.pi/180;
61.2)将空间坐标a,b转化到同一平面坐标系下,并求出直线ab 与y轴的夹角α(α《90);
62.double rc=6378137;//赤道半径
63.double rj=6356725;//极半径
64.ec=rj+(rc-rj)*(90-lat)/90;
65.ed=ec*math.cos(m_radla);
66.double dx=(b.m_radlo-a.m_radlo)*a.ed;
67.double dy=(b.m_radla-a.m_radla)*a.ec;
68.doubleα=math.atan(math.abs(dx/dy))*180/math.pi;
69.3)根据a、b的经纬度差,判断目标相对于监控设备在平面坐标系的哪个象限,然后算出顺时针水平旋转角度anglep;
70.条件象限旋转角度angledx》0&&dy》0第一象限anglep=αdx》0&&dy《=0第二象限anglep=180-αdx《0&&dy《0第三象限anglep=α+180dx《0&&dy》0第四象限anglep=360-α
71.4)通过监控设备a的安装高度h和a、b两点间的距离x计算垂直旋转角度anglet;
72.doublex=2*math.asin(math.sqrt(math.pow(math.sin((b.m_ra dla-a.m_radla)/2),2)+
73.math.cos(b.m_radla)*math.cos(a.m_radla)*math.pow(math.s in((b.m_radlo-a.m_radlo)/2),2)));
74.x=x*rc;
75.x=math.round(x*10000)/10000;
76.θ=arctan(h/x)
77.anglet=θ;
78.本发明中,所述s7中计算监控设备的垂直旋转角度anglet,并将anglep和anglet发送给监控设备并进行标注,具体为:将旋转角度anglep和anglet按照设备的传输协议发送给设备,同时从感知网获取目标的标签信息并推送到ar视图服务器进行标注。
79.本发明中,所述s8中从感知网获取目标的标签信息并推送到ar 视图服务器进行标注,然后切换到ar视图,监控设备根据旋转角度自动对准目标具体为:设备根据给定的旋转角度旋转后,浏览器自动切换到ar视图,实时展示目标情况及对应目标的标签信息。
80.本发明中:统一监控设备初始位为正北方,计算相对于正北方监控设备到目标地旋转角度,从而实现对不同类型监控设备的统一调用二维地图和ar增强现实相结合,快速定位目标,并通过对ar图像中目标打标签的方式,有效区分各个目标,实时查看目标信息,减少二维地图和ar的相互切换;
81.二维地图和ar相结合,在实时视频流中展示目标标签信息,方便用户区分并跟踪目标;利用监控设备可相对初始位进行旋转给定角度这一基本能力,可根据旋转角度自动快速切换到目标,并快速低成本对接各类监控设备;二维地图上展示目标附近安装的监控设备和设备可视域,对不同类型的监控设备显示不同的图例,可直观地查看某区域监控设备覆盖情况;
82.可对监控设备设置不同的初始位来计算水平旋转角度达到快速定位的效果;未来可在三维地图等场景下通过选取目标,计算水平旋转角度,达到快速定位的效果。
83.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1