TTCAN通信架构与智能节点、燃气轮机分布式控制系统的制作方法
ttcan通信架构与智能节点、燃气轮机分布式控制系统
技术领域
1.本发明涉及燃气轮机控制技术领域,尤其是ttcan通信架构与智能节点、燃气轮机分布式控制系统。
背景技术:
2.相对于集中式控制系统,分布式控制系统具有重量轻、可靠性和可维护性强、研制周期短、开发成本低等优点,同时可以更好地适应分层结构以及各种新技术的发展,满足燃气轮机控制系统小型化、综合化、高性能、高可靠性的发展需求。构建燃气轮机分布式控制系统的关键技术难点在于设计一种具有鲁棒性和可靠性的分布式数据总线,保证某个或某些节点在掉电或发生故障的情况下不会影响到分布式系统中其他节点正常运行,是构建分布式控制系统首先要突破的关键技术环节之一。
3.can网络凭借灵活性好、响应速度快、适应性强的优势,已在众多领域的分布式控制系统中广泛应用。但是,作为事件触发总线,can总线存在不确定性、易造成故障蔓延、不利于系统重构等缺点,不适合在航空航天、军用舰船等安全关键领域推广应用。为解决事件触发总线的以上缺点,在现行can协议的基础上引入了时间触发机制,提出了一种新的数据总线架构ttcan总线。目前,ttcan总线仅在分布式客房控制系统、燃料电池分布式控制系统、航空发动机分布式控制系统等领域开展相关设计,在燃气轮机分布式控制系统领域尚未开展研究及应用。
技术实现要素:
4.本发明人针对上述问题及技术需求,提出了ttcan通信架构与智能节点、燃气轮机分布式控制系统,本发明的技术方案如下:
5.第一方面,本技术提供了一种ttcan通信架构,一个ttcan集群中包括计时主机节点、若干个备份主机节点和若干个普通节点,每个节点均包括主机控制器、ttcan协议控制器以及用于两者之间通信的cni,各节点的ttcan协议控制器通过can总线进行数据交互;ttcan协议控制器中设有静态消息交换调度表,表中规定了各个节点收发消息的时刻;计时主机节点的ttcan协议控制器基于静态消息交换调度表,向备份主机节点和普通节点传输校时基准信息,实现集群时间同步;备份主机节点用于在计时主机节点发生故障时,按照事先约定的优先级顺序,由下一优先级备份主机节点切换为计时主机节点。
6.其进一步的技术方案为,静态消息交换调度表中包括多个基本周期,每个基本周期均包括若干个长度不等的时间窗,各个节点在时间窗内收发消息;时间窗包括同步窗口、仲裁窗口、独占窗口和自由窗口;其中,同步窗口设置在每个基本周期的起始位置,用于传输时间参考信息,计时主机节点将本地时间作为全局时间通过同步窗口发送给备份主机节点和普通节点,备份主机节点和普通节点通过同步窗口将收到的全局时间加上传输延时时间后作为各自的本地时间;仲裁窗口用于多个节点发送消息,发生总线冲突时通过can总线自身的非破坏仲裁机制解决;独占窗口分配给特定消息,用于传输硬实时、周期性的信息;
自由窗口不传输消息,用于后期网络扩展。
7.第二方面,本技术还提供了一种ttcan智能节点,该智能节点基于如第一方面提供的ttcan通信架构实现,ttcan智能节点包括主机控制器、ttcan协议控制器以及用于两者之间通信的cni,ttcan协议控制器接入can总线与集群中的其他智能节点进行数据交互;
8.主机控制器包括主机处理器,用于处理和外部设备控制相关的应用数据,以及与ttcan协议控制器进行数据交互;
9.ttcan协议控制器包括协议处理器以及与其相连的时钟模块和数据中转模块,协议处理器与主机处理器通过cni连接,完成与主机控制器的数据交互、时间窗分配以及集群重构;数据中转模块接入can总线,对接收的数据进行处理后传输给协议处理器或者通过can总线传输给其他智能节点,数据中转模块还连接时钟模块,实现集群时间同步。
10.其进一步的技术方案为,数据中转模块包括冗余编解码模块、物理层驱动模块、静态消息交换调度表以及与冗余编解码模块进行数据交互的本地时间计数器和冗余bg模块,静态消息交换调度表分别连接冗余编解码模块和冗余bg模块,冗余bg模块还与物理层驱动模块进行数据交互;数据中转模块用于实现通信数据编码解码、校准、时钟同步、时间窗分配及调度功能,保证各个智能节点之间的正常通信。
11.其进一步的技术方案为,本地时间计数器连接时钟模块,对于作为计时主机节点的ttcan智能节点,本地时间计数器在时钟模块的驱动下,对本地时间进行循环计数,计数值在静态消息交换调度表的结尾进行清零;将本地时间作为全局时间通过静态消息交换调度表的同步窗口传输给集群中的其他智能节点;其他智能节点通过静态消息交换调度表的同步窗口将收到的全局时间加上传输延时时间后作为各自的本地时间,从而实现整个集群的时间同步。
12.其进一步的技术方案为,冗余编解码模块与协议处理器进行数据交互,用于将协议处理器要发出的应用数据、本地时间信息进行编码后传输给冗余bg模块;冗余编解码模块还用于将从冗余bg模块收到的应用数据进行解码并发送给协议处理器,还用于将从冗余bg模块收到的本地时间信息进行解码,对本地时间计数器的计数值进行修正。
13.其进一步的技术方案为,冗余bg模块内包括独立计数器,利用静态消息交换调度表的同步窗口收到的本地时间信息对独立计数器进行修正;当智能节点的本地时间计数器和独立计数器同时授权can总线使用权限时,冗余bg模块才允许智能节点进行数据发送。
14.其进一步的技术方案为,物理层驱动模块包括双通道驱动电路,其中,每个单通道驱动电路的数据传输端接入can总线,数据收发端连接冗余bg模块;单通道驱动电路均基于adm3053芯片实现。
15.第三方面,本技术还提供了一种燃气轮机分布式控制系统,包括燃气轮机模拟装置、上位机以及转速采集节点、中央处理节点、油门位置控制节点,三个节点均基于如第二方面提供的ttcan智能节点实现;转速采集节点定义为ttcan通信架构中的普通节点,用于采集燃气轮机模拟装置的转速信息并通过can总线传输给中央处理节点;中央处理节点定义为ttcan通信架构中的计时主机节点,用于根据采集的转速信息和上位机给定的转速信息进行pid计算,得到理论油门位置并通过can总线传输给油门位置控制节点;油门位置控制节点定义为ttcan通信架构中的普通节点,用于采集燃气轮机模拟装置的实际油门位置,再结合理论油门位置进行pid计算,得到油门驱动电流并输出给燃气轮机模拟装置;燃气轮
机模拟装置根据油门驱动电流调整油门开度,从而实现对燃气轮机的转速和燃油位置的双重闭环控制。
16.其进一步的技术方案为,该系统还包括备份中央处理节点,该节点基于如如第二方面提供的ttcan智能节点实现,定义为ttcan通信架构中的备份主机节点,用于在计时主机节点发生故障时,按照事先约定的优先级顺序,由下一优先级备份主机节点切换为计时主机节点,待故障恢复后,通过静态消息交换调度表的同步窗口获取全局时间,重新加入集群。
17.本发明的有益技术效果是:
18.基于ttcan通信架构设计ttcan智能节点,基于多个智能节点建立燃气轮机分布式控制系统,为后期时间触发机制在燃气轮机控制领域开展推广应用奠定了理论基础;ttcan使用时间和事件共同触发,将高精度时间触发的通信系统和全局广泛的网络时间引入can总线中,大大提高了总线的可预测性、可靠性和实时性,满足了安全关键领域的应用需求;控制系统中的智能节点间进行数据交互并与燃气轮机模拟装置构成转速控制的大闭环和燃油位置控制的小闭环,二者协调工作,实现对燃气轮机转速和燃油位置的实时控制。
附图说明
19.图1是本技术一个实施例提供的ttcan通信架构示意图。
20.图2是本技术一个实施例提供的静态消息交换调度表示意图。
21.图3是本技术另一个实施例提供的ttcan智能节点示意图。
22.图4是本技术另一个实施例提供的单通道驱动电路原理图。
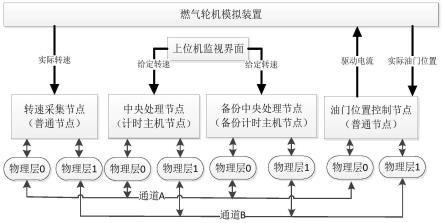
23.图5是本技术再一个实施例提供的燃气轮机分布式控制系统示意图。
具体实施方式
24.下面结合附图对本发明的具体实施方式做进一步说明。
25.实施例一:
26.如图1所示,一种ttcan通信架构,集群中包括一个计时主机节点、若干个备份主机节点和若干个普通节点,每个节点均包括主机控制器、ttcan协议控制器以及用于两者之间通信的cni(communication net interface,通信网络接口),各节点的ttcan协议控制器通过can总线进行数据交互。该机构运行时,计时主机节点的ttcan协议控制器基于其内部的静态消息交换调度表,向备份主机节点和普通节点传输校时基准信息,实现集群时间同步。
27.ttcan协议是在传统can协议的数据链路层之上引入的高层协议,属于can协议的扩展协议。ttcan协议通过静态消息交换调度表和时间同步来实现基于事件触发的can和时间触发机制相结合。其中,静态消息交换调度表也即矩阵周期,用于规定各个节点收发消息的时刻,各个消息的传递按照静态消息交换调度表有序进行。如图2所示,矩阵周期中包括多个基本周期,每个基本周期开始于一个时间参考消息(同步消息),并且以下一个时间参考消息的开始作为结束。基本周期根据用户需求可自主定义,包括若干个长度不等的时间窗,各个节点在时间窗内收发消息。时间窗包括同步窗口、仲裁窗口、独占窗口和自由窗口。其中,同步窗口必须设置在每个基本周期的起始位置,用于传输时间参考信息,计时主机节点的ttcan协议控制器将本地时间作为全局时间通过同步窗口发送给备份主机节点和普通
节点,备份主机节点和普通节点的ttcan协议控制器通过同步窗口将收到的全局时间加上传输延时时间后作为各自的本地时间。仲裁窗口用于多个节点发送消息,发生总线冲突时通过can总线自身的非破坏仲裁机制解决。独占窗口分配给特定消息,用于传输硬实时、周期性的信息。自由窗口不传输消息,用于后期网络扩展。
28.备份主机节点用于在计时主机节点发生故障时,按照事先约定的优先级顺序,由下一优先级备份主机节点切换为计时主机节点,待故障恢复后,通过同步窗口获取全局时间,重新加入集群。
29.实施例二:
30.本例以xilinx公司推出的zynq-7000系列产品为平台,基于如实施例一提供的ttcan通信架构开展ttcan智能节点的设计,其硬件架构框图如图3所示,图中实线表示应用数据流向,虚线表示时间数量流向。ttcan智能节点包括主机控制器、ttcan协议控制器以及用于两者之间通信的cni,ttcan协议控制器接入can总线与集群中的其他智能节点进行数据交互。下面详细介绍各部分的组成及原理。
31.a)主机控制器,包括主机处理器cpu0以及保证其运行的存储模块和时钟模块,主机处理器cpu0用于处理和外部设备控制相关的应用数据,以及与ttcan协议控制器进行数据交互,外部设备比如燃气轮机等需要分布式控制的设备或系统。
32.b)ttcan协议控制器,包括协议处理器cpu1以及与其相连的存储模块、时钟模块和数据中转模块,数据中转模块接入can总线,对接收的数据进行处理后传输给协议处理器或者通过can总线传输给其他智能节点,数据中转模块还连接时钟模块,实现集群时间同步。数据中转模块包括冗余编解码模块、物理层驱动模块、静态消息交换调度表以及与冗余编解码模块进行数据交互的本地时间计数器和冗余bg(bus guardian,总线保护器)模块,静态消息交换调度表分别连接冗余编解码模块和冗余bg模块,冗余bg模块还与物理层驱动模块进行数据交互。数据中转模块用于实现通信数据编码解码、校准、时钟同步、时间窗分配及调度功能,保证各个智能节点之间的正常通信。具体的:
33.(1)协议处理器cpu1是ttcan协议控制器的核心,与主机处理器cpu0通过cni连接,完成与主机控制器的数据交互、时间窗分配以及集群重构。通过zynq芯片内部的axi总线实现pl接口的各个总线协议模块的协调工作。
34.(2)本地时间计数器连接时钟模块,对于作为计时主机节点的ttcan智能节点,本地时间计数器在时钟模块的驱动下,对本地时间进行循环计数,计数值在静态消息交换调度表的结尾进行清零,也即在矩阵周期的最后一个基本周期结尾进行清零。同时,在静态消息交换调度表的同步窗口将本地时间作为全局时间传输给集群中的其他智能节点。其他智能节点通过静态消息交换调度表的同步窗口将收到的全局时间加上传输延时时间后作为各自的本地时间,从而实现整个集群的时间同步。
35.(3)冗余编解码模块与协议处理器cpu1进行数据交互,用于将协议处理器cpu1要发出的应用数据、本地时间信息等信息进行编码后传输给冗余bg模块。冗余编解码模块还用于将从冗余bg模块收到的应用数据进行解码,通过axi总线发送给协议处理器cpu1,还用于将从冗余bg模块收到的本地时间信息进行解码,对本地时间计数器的计数值进行修正。
36.该模块设计时,并未采用zynq开发软件中提供的相关ip核来实现,而是根据设计需求,利用pl内的fpga资源自主开发设计的,具有较高的灵活性和可更改性。
37.(4)静态消息交换调度表规定了矩阵周期节点发送和接收消息的时刻,需在集群启动前定义完成,集群运行过程中不支持在线更改。本例定义的静态消息交换调度表的长度为100ms,包含5个基本周期,每个基本周期长度为20ms。
38.(5)冗余bg模块是一个总线权限保护装置,用来避免节点在发送时间外占用总线,从而造成总线数据紊乱。其内部包括独立计数器,使用不同于本地时间计数器的pll资源进行独立计数,同时在每个基本周期,利用同步窗口收到的本地时间信息对独立计数器进行修正。只有当智能节点的本地时间计数器和独立计数器同时授权can总线使用权限时,冗余bg模块才允许智能节点进行数据发送。
39.(6)物理层驱动模块,该模块是唯一在zynq芯片外部实现的模块,用于提高传输信号的抗干扰能力和长距离传输驱动能力。该模块包括双通道驱动电路,其中,每个单通道驱动电路的数据传输端(15、17引脚)接入can总线,数据收发端(4、5引脚)连接冗余bg模块。本例的单通道驱动电路均基于adm3053芯片实现,该芯片内部集成隔离dc/dc转换器和电源隔离can收发器,最大传输速率为1mbps,单通道驱动电路的原理图如图4所示。
40.c)cni,用于实现主机控制器与协议控制器之间的数据交互,将协议控制器和ttcan网络的状态信息提供给主机控制器,同时将主机控制器的控制指令传输给协议控制器。在本例中,使用zynq芯片中ocm(on-chip memory,片上存储器)内的256kb的ram来实现。在使用过程中,将该ram资源模拟成一个双端口存储器,允许主机控制器的cpu0和协议控制器的cpu1分时段、分区域对该ram资源进行读取和写入,从而实现两者之间的数据通信。
41.在本例中,相比传统的单个处理器或单个fpga为核心或两者简单组合的设计方案,使用单芯片内集成双核mcu+fpga的硬件架构开展智能节点设计,大大提高了分布式控制系统通信速率,突破片外通信的技术瓶颈。而且ttcan协议控制器的软硬件实现主要集中在zynq芯片内,减小了控制器的体积与重量,便于后期安装。
42.需要说明的是,实现ttcan协议控制器也可以使用其他替代方案,如传统的arm+fpga或dsp+fpga,也可以在fpga内构建处理器软核+fpga的模式。但是,这些方案的通信可靠性和快速性均不如本例提出的技术方案。
43.其次,本方案中仅规定了基于zynq芯片实现ttcan协议控制器的一种架构,各个功能模块的具体实现方法及方式可以根据设计者自行开展。同样,物理层实现也是如此,设计者可以采用其他型号隔离收发器芯片实现物理层设计。
44.实施例三:
45.hil(hardware-in-the-loop,硬件在环)仿真是燃气轮机常用的一种仿真测试方法,采用真实的i/o和控制器硬件设备与虚拟的燃气轮机模型相结合,动态响应过程和实际燃气轮机的响应过程高度相似,是一种高置信度的动态仿真验证手段。本例提供的一种燃气轮机分布式控制系统,包括燃气轮机模拟装置、上位机以及转速采集节点、中央处理节点、备份中央处理节点、油门位置控制节点共同搭建硬件在环仿真平台,如图5所示,对智能节点的工作性能进行验证。
46.其中,燃气轮机模拟装置包含燃气轮机模型和真实的输入输出接口。四个节点均基于如实施例二提供的ttcan智能节点实现。中央处理节点定义为ttcan通信架构中的计时主机节点,备份中央处理节点定义为ttcan通信架构中的备份计时主机节点,其余定义为普通节点。该试验平台包括转速控制的大闭环和燃油位置控制的小闭环,二者协调工作,实现
对燃气轮机转速和燃油位置的实时控制。转速采集节点用于采集燃气轮机模拟装置的转速信息并通过can总线传输给中央处理节点;中央处理节点用于根据采集的转速信息和上位机给定的转速信息进行pid计算,得到理论油门位置并通过can总线传输给油门位置控制节点;油门位置控制节点用于采集燃气轮机模拟装置的实际油门位置,再结合理论油门位置进行pid计算,得到油门驱动电流并输出给燃气轮机模拟装置;燃气轮机模拟装置根据油门驱动电流调整油门开度,从而实现对燃气轮机的转速和燃油位置的双重闭环控制。备份中央处理节点正常状态下,不发出控制指令,当中央处理节点发生故障时,按照事先约定的优先级顺序,由下一优先级备份主机节点切换为计时主机节点,待故障恢复后,通过静态消息交换调度表的同步窗口获取全局时间,重新加入集群。
47.具体的,转速采集节点的主机控制器通过转速传感器采集燃气轮机转速信息,并将采集结果通过cni传输给该节点的ttcan协议控制器。协议控制器按照ttcan协议将采集结果经过编码并经过冗余bg模块校准后,在两路冗余can总线上同时传输。
48.中央处理节点的ttcan协议控制器从can总线获取转速信息,经过解码后将采集结果通过cni传输给该节点的主机控制器,主机控制器根据采集到的转速信息和给定的转速信息进行pid运算,得到理论油门位置。然后,通过cni传输给该节点的ttcan协议控制器。协议控制器按照ttcan协议将理论油门位置经过编码并经过冗余bg模块校准后,在两路冗余can总线上同时传输。
49.油门位置控制节点的ttcan协议控制器从can总线获取理论油门位置,经过解码后将理论油门位置通过cni传输给该节点的主机控制器。主机控制器通过rvdt(rotary variable differential transformer,旋转可变差动变压器)获取实际油门位置,然后结合获得的理论油门位置进行pid控制,实现油门位置的闭环控制。这三类智能节点协同工作,实现对燃气轮机转速的闭环控制。
50.本技术基于ttcan通信架构设计ttcan智能节点,基于多个智能节点建立燃气轮机分布式控制系统,为后期时间触发机制在燃气轮机控制领域开展推广应用奠定了理论基础。ttcan使用时间和事件共同触发,将高精度时间触发的通信系统和全局广泛的网络时间引入can总线中,大大提高了总线的可预测性、可靠性和实时性,满足了安全关键领域的应用需求。控制系统中的智能节点间进行数据交互并与燃气轮机模拟装置构成转速控制的大闭环和燃油位置控制的小闭环,二者协调工作,实现对燃气轮机转速和燃油位置的实时控制。
51.以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1