适用于小型无人平台的水下无线光通信装置和方法、平台与流程
1.本公开属于水下无线光通信技术领域,特别涉及一种适用于小型无人平台的水下无线光通信装置和方法、平台。
背景技术:
2.水下图像、视频传输数据量大,对通信要求传输速度快,而水下无线光通信具有传输带宽大、速率高等优点,成为满足水下非接触式高速通信的首要选择。
3.相关技术中,水下无线光通信装置包括发射模块和接收模块,发射模块包括二维伺服转台和发射光源。发射光源用于发射光束,接收模块用于接收其他水下无线光通信装置发射的光束。在该水下无线光通信装置与另一水下无线光通信装置通信时,需要控制二维伺服转台转动,以控制发射光源输出的光束的方向,使得发射光源输出的光束被另一水下无线光通信装置接收到。
4.这种水下无线光通信装置中包括二维伺服转台,结构复杂、体积大,不适用于小型无人平台。
技术实现要素:
5.本公开实施例提供了一种适用于小型无人平台的水下无线光通信装置和方法、平台,该水下无线光通信装置结构简单、体积小。所述技术方案如下:
6.一方面,提供了一种适用于小型无人平台的水下无线光通信装置,所述装置包括:发射模块,用于产生发射光信号,所述发射光信号的发散角全角达到20度以上;接收模块,用于接收光信号,对所述光信号进行解调得到所述光信号携带的数据信息,以及确定所述光信号的光斑坐标信息,所述接收模块的接收视场角全角不小于20度;辅助对准模块,与所述接收模块连接,用于指示所述小型无人平台根据所述光信号携带的数据信息和/或所述光斑坐标信息进行偏转。
7.可选地,所述发射模块包括a个发光二极管led光源,所述a个led光源在圆周范围内采用分布式设计且朝向不同方向布置,在所述圆周的直径方向包括b个所述led光源,每个所述led光源的发散角全角为α度,所述发射模块的发散角全角为b*α度,其中a、b为正整数,且a》b,b》1,b*α大于20度。
8.可选地,所述接收模块包括4路高灵敏接收组件,所述4路高灵敏接收组件在圆周范围内采用对称分布且朝向不同方向布置,每路所述高灵敏接收组件的接收视场角全角为所述接收模块的接收视场角全角为且大于20度。
9.可选地,所述光信号携带的数据信息包括另一水下无线光通信装置的坐标位置信息。
10.可选地,所述4路高灵敏接收组件用于接收4路所述光信号,并将4路所述光信号转换为4路电信号;所述接收模块根据所述4路电信号的电流值,确定所述光斑坐标信息的直角坐标或极坐标。
11.可选地,所述辅助对准模块用于将所述光斑坐标信息和/或所述另一水下无线光通信装置的坐标位置信息发送给所述小型无人平台;所述辅助对准模块还用于将设定扫描方向信息发送给所述小型无人平台,所述设定扫描方向信息用于指示主动寻找所述另一水下无线光通信装置;所述辅助对准模块还用于指示所述小型无人平台根据信息优先级进行偏转,所述另一水下无线光通信装置的坐标位置信息优先级高于所述光斑坐标信息,所述光斑坐标信息优先级高于所述设定扫描方向信息。
12.可选地,所述辅助对准模块用于,当所述4路电信号中的任一路电信号的电流值大于阈值电流,且所述极坐标中的极径大于阈值半径时,将所述光斑坐标信息发送给所述小型无人平台;当所述4路电信号中的每路电信号的电流值大于阈值电流,且所述极坐标中的极径小于阈值半径时,停止向所述小型无人平台发送所述光斑坐标信息;其中,所述阈值电流为背景噪声电流值的2-4倍,所述阈值半径取值范围为[0.2,0.4]。
[0013]
可选地,所述装置还包括拍摄模块和白光照明模块,所述拍摄模块与所述发射模块连接,用于拍摄水下信息,以及缓存所述水下信息;所述白光照明模块布置在所述拍摄模块周围。
[0014]
另一方面,提供了一种小型无人平台,所述平台本体和前述的装置,所述装置安装在所述平台本体内,所述平台本体内对应所述装置的位置具有透明窗口。
[0015]
又一方面,提供了一种水下光通信方法,基于前述装置实现,所述方法包括:接收光信号;确定所述光信号的光斑坐标信息;对所述光信号进行解调得到所述光信号携带的数据信息;指示小型无人平台根据所述光斑坐标信息和/或所述光信号携带的数据信息进行偏转。
[0016]
本公开实施例提供的技术方案带来的有益效果至少包括:
[0017]
在本公开实施例中,水下无线光通信装置通过接收模块接收光信号,并对光信号进行解调得到光信号携带的数据信息,以及确定光信号的光斑坐标信息;通过辅助对准模块指示小型无人平台根据光信号携带的数据信息和/或光斑坐标信息进行偏转,以使水下无线光通信装置与另一水下无线光通信装置的通信链路对准。水下无线光通信装置无需配置二维伺服转台来转动调整水下无线光通信装置的发送和接收方向,该水下无线光通信装置结构简单、体积小,适用于小型无人平台。
附图说明
[0018]
图1是本公开实施例提供的一种水下无线光通信装置的应用场景示意图;
[0019]
图2是本公开实施例提供的另一种水下无线光通信装置的应用场景示意图;
[0020]
图3是本公开实施例提供的一种水下无线光通信装置的结构示意图;
[0021]
图4是本公开实施例提供的一种水下无线光通信装置的模块布置示意图;
[0022]
图5是本公开实施例提供的一种水下无线光通信方法流程图。
具体实施方式
[0023]
为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
[0024]
图1是本公开实施例提供的一种适用于小型无人平台的水下无线光通信装置的应
用场景示意图。如图1所示,第一光通信设备10搭载在位于水下的小型无人平台1上。第二光通信设备20搭载在位于水下的小型无人平台2上。小型无人平台1在水下航行,当航行至目标位置时,需要通过第一光通信设备10与第二光通信设备20进行通信,以将采集到的信息发送给第二光通信设备20,或者,接收第二光通信设备20发送的信息。
[0025]
在本公开实施例中,第一光通信设备10和小型无人平台1为分体式结构,即第一光通信设备10安装在小型无人平台1上并通过通信接口与小型无人平台1的通信接口连接。
[0026]
第一光通信设备10在小型无人平台1的头部区域或其他舱段,小型无人平台1的相应位置具备透明窗口,以便第一光通信设备10发送和接收光信号。
[0027]
图2是本公开实施例提供的另一种适用于小型无人平台的水下无线光通信装置的应用场景示意图。图2与图1的区别在于,第一光通信设备10在小型无人平台1的中间舱段。
[0028]
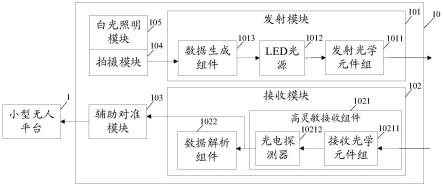
图3是本公开实施例提供的一种水下无线光通信装置的结构示意图。该水下无线光通信装置为图1或图2中的第一光通信设备10或者第二光通信设备20。以第一光通信设备10为例,如图3所示,第一光通信设备10包括发射模块101、接收模块102和辅助对准模块103。
[0029]
发射模块101用于产生发射光信号。其中,发射光信号的发散角全角达到20度以上。光束的发散角用于衡量光束从束腰向外发散的速度。
[0030]
发射模块101包括a个发光二极管(light emitting diode,led)光源1012,所述a个led光源1012在圆周范围内采用分布式设计且朝向不同方向布置。在圆周的直径方向包括b个led光源1012,每个led光源1012的发散角全角为α度,发射模块的发散角全角为b*α度,其中a、b为正整数,且a》b,b》1,b*α大于20度。
[0031]
示例性地,a取值为8,b取值为2,每个led光源1012的发散角全角大于10度,发射光信号的发散角全角大于20度。
[0032]
led具有光斑大的特点,对通信链路对准精度要求相对较低,有利于降低小型无人平台的偏转精度。此外,多个led扩大了光信号的覆盖范围,减小了覆盖盲区。
[0033]
在一些示例中,发射模块101还包括发射光学元件组1011,发射光学元件组1011和光源1012的个数相同。发射光学元件组1011用于对对应的光源发出的光进行整形,以调整光束发散角。发射光学元件组1011在光信号的发射方向上位于对应的光源1012的前方或者后方。示例性地,发射光学元件组1011包括位于对应的光源1012的后方的聚光杯。
[0034]
在一些示例中,发射模块101还包括数据生成组件1013。数据生成组件1013用于对发送信息编码调制后,发送至光源1012。光源1012产生的光信号携带该发送信息。示例性地,数据生成组件1013包括依次连接的编码器、调制器和数模转换器。
[0035]
可选地,发送信息包括握手信息。该握手信息用于通知第二光通信设备20第一光通信设备10要进行通信并开始链路对准。
[0036]
第二光通信设备20接收到握手信息,会向第一光通信设备发送承载有握手信息的响应信息的光信号。当第一光通信设备10未收到来自第二光通信设备20针对握手信息的响应信息时,向第二光通信设备20重复发送承载握手信息的光信号。
[0037]
可选地,发射模块101还用于向第二光通信模块20发送锁定状态以及通信开始结束标志。锁定状态用于指示与第二光通信模块20的通信链路是否对准,通信开始结束标志用于指示与第二光通信设备20之间的通信开始或者结束。
[0038]
接收模块102用于接收光信号,对光信号进行解调得到光信号携带的数据信息,以及确定光信号的光斑坐标信息。接收模块102的接收视场角全角不小于20度。
[0039]
接收模块102包括4路高灵敏接收组件1021,4路高灵敏接收组件1021在圆周范围内采用对称分布且朝向不同方向布置。
[0040]
每路高灵敏接收组件1021的接收视场角全角为接收模块102的接收视场角全角为且大于20度。示例性地,每路高灵敏接收组件1021的接收视场角全角为30度,接收模块102的接收视场角全角为60度。圆周的直径方向的两个高灵敏接收组件的接收直径等于圆周直径。
[0041]
其中,接收视场角全角是指以接收组件为顶点,以被测目标的物像可通过接收组件的最大范围的两条边缘构成的夹角。接收直径是指接收的光斑的直径。
[0042]
高灵敏接收组件1021包括接收光学元件组10211和光电探测器10212,接收光学元件组10211和光电探测器10212分别为4路。接收光学元件组10211用于接收光信号,并将光信号发送至光电探测器10212;光电探测器10212用于将光信号转换为电信号。每个光电探测器10212的探测中心置于每个接收光学元件组10211的焦点处。示例性地,接收光学元件组10211包括非球面汇聚透镜。光电探测器10212可以为高灵敏光电探测器,例如光电倍增管等。
[0043]
图4是本公开实施例提供的一种水下无线光通信装置的模块布置示意图,如图4所示,发射光学元件组1012和接收光学元件10211组布置在同一个圆周范围内,4个接收光学元件组10211在圆周范围内按照90度间隔均匀布置,8个发射光学元件组1011在圆周范围内错开接收光学元件组10211位置,并以圆心为中心两两对称布置。
[0044]
可选地,接收模块102用于根据4路电信号的电流值,确定光斑坐标信息的直角坐标或极坐标。
[0045]
在一些示例中,光斑坐标信息采用直角坐标表示。如图4所示,以4路接收光学元件组10211所在圆周的圆心为原点,以其中两路相距180度的接收光学元件组10211的连线为横坐标轴,以另两路相距180度的接收光学元件组10211的连线为纵坐标轴,构建直角坐标系。光斑坐标信息指示光斑相对于圆心的偏离位置。
[0046]
光斑坐标信息的直角坐标采用公式(1)和公式(2)计算:
[0047][0048][0049]
公式(1)和(2)中,x、y分别表示光斑坐标信息的横坐标和纵坐标,i1、i2、i3和i4分别表示4路电信号的电流值;
[0050]
在另一些示例中,光斑坐标信息采用极坐标表示。以四路接收光学元件组10211所在圆周的圆心为极点,以其中一个接收光学元件组10211与极点的连线作为极轴,构建极坐标系。该极坐标中的极径用于指示第一光通信设备10相对于目标通信链路的偏移程度,极坐标中的极角用于指示第一光通信设备10相对于目标通信链路的偏移方向。
[0051]
光斑坐标信息的极坐标采用公式(3)和公式(4)计算:
[0052]
[0053][0054]
公式(3)和(4)中,r、θ分别表示光斑坐标信息的极坐标中的极径和极角,x、y分别表示光斑坐标信息的直角坐标中的横坐标和纵坐标。
[0055]
在一些示例中,接收模块102包括数据解析组件1022,数据解析组件1022用于对光信号进行解调得到光信号携带的数据信息。示例性地,数据解析组件1022包括依次连接的三级放大电路、滤波电路、模数转换器、解调器和解码器。
[0056]
可选地,光信号携带的数据信息包括第二光通信设备20的坐标位置信息。在一些示例中,第二光通信设备20的坐标位置信息包含在来自第二光通信设备20针对握手信息的响应信息中。
[0057]
辅助对准模块103,与接收模块102连接,用于指示小型无人平台1根据光信号携带的数据信息和/或光斑坐标信息进行偏转。
[0058]
可选地,辅助对准模块103用于将光斑坐标信息和/或第二光通信设备20的坐标位置信息发送给小型无人平台1。
[0059]
示例性地,第二光通信设备20的坐标位置信息包括第二光通信设备20所在位置的经纬度信息。
[0060]
可选地,辅助对准模块103还用于将设定扫描方向信息发送给小型无人平台1,设定扫描方向信息用于指示主动寻找第二光通信设备20。
[0061]
可选地,辅助对准模块103还用于指示小型无人平台1根据信息优先级进行偏转,第二光通信设备20的坐标位置信息优先级高于光斑坐标信息,光斑坐标信息优先级高于设定扫描方向信息。
[0062]
当第一光通信设备10有通信需求时,辅助对准模块103指示小型无人平台1按照设定扫描方向信息进行偏转,用于寻找通信目标;当第一光通信设备10接收到光信号,光信号中携带第二光通信设备20的坐标位置信息时,辅助对准模块103指示小型无人平台1先按照第二光通信设备20的坐标位置信息进行偏转,再按照光斑坐标信息进行偏转;当第一光通信设备10接收到光信号中没有携带第二光通信设备20的坐标位置信息时,辅助对准模块103指示小型无人平台1按照光斑坐标信息进行偏转。
[0063]
可选地,辅助对准模块103还用于当4路电信号中的任一路电信号的电流值大于阈值电流,且极坐标中的极径大于阈值半径时,将光斑坐标信息发送给小型无人平台1;当4路电信号中的每路电信号的电流值大于阈值电流,且极坐标中的极径小于阈值半径时,停止向小型无人平台1发送光斑坐标信息。
[0064]
其中,阈值电流为背景噪声电流值的2-4倍,阈值半径取值范围为[0.2,0.4]。极坐标的极径小于阈值半径时,表示第一光通信设备10和第二光通信设备20之间的通信链路已对准,小型无人平台1结束偏转。
[0065]
示例性地,背景噪声电流值可以根据实验数据设置。实验时,当第一光通信设备与第二光通信设备间的通信链路未建立时,如第二光通信设备没有发送光信号时,测量此时第一光通信设备中光电探测器10212输出的电信号的电流值,得到的电流值为背景噪声电流值。
[0066]
可选地,辅助对准模块103还用于,当将光斑坐标信息发送给小型无人平台1时,向小型无人平台1发送锁定失败状态;当停止向小型无人平台1发送光斑坐标信息时,向小型无人平台1发送锁定成功状态。
[0067]
可选地,第一光通信设备10还包括拍摄模块104和白光照明模块105。拍摄模块104与发射模块101连接,用于拍摄水下信息,以及缓存水下信息。白光照明模块布置在拍摄模块104周围。
[0068]
发射模块101还用于向第二光通信设备20发送携带水下信息的光信号,水下信息发送完成后,向第二光通信设备20发送携带通信结束的光信号,通知第二光通信设备20本次通信结束。
[0069]
示例性地,如图4所示,拍摄模块104位于圆周的圆心处,白光照明模块105围绕在拍摄模块104周围。
[0070]
示例性地,第一光通信设备10没有数据发送需求或者数据发送完成时,发射模块101、拍摄模块104和白光照明模块105为关闭状态。当有数据发送需求时,发射模块101为开启状态,或者需要拍摄水下信息时,拍摄模块104和白光照明模块105为开启状态。
[0071]
在本公开实施例中,没有数据发送需求或者数据发送完成时发射模块101、拍摄模块104和白光照明模块105为关闭状态,可以节省第一光通信设备10的电力消耗。
[0072]
第一光通信设备10和小型无人平台1通过辅助对准模块103进行通信,采用以太网接口协议方式通信。示例性地,通信内容包括如表1所示的内容:
[0073]
表1
[0074][0075]
其中,序号包括第一光通信设备和小型无人平台间通信消息的编号,光通信设备的标识为第一光通信设备的标识,小型无人平台的标识为第一光通信设备所在的小型无人平台的标识,拍摄模块开启标识用于指示拍摄模块的开启或关闭状态,白光照明模块开启标识用于指示白光照明模块的开启或关闭状态,发射模块开启标识用于指示发射模块的开启或关闭状态,接收模块开启标识用于指示接收模块的开启或关闭状态。示例性地,在第一光通信设备下水之前,接收模块为关闭状态,有利于保护高灵敏接收组件。极坐标的极径和极坐标的极角为光斑坐标信息的极径和极角,锁定状态用于指示与第二光通信模块的通信链路是否对准,通信开始结束标志用于指示第一光通信设备与第二光通信设备间的通信开始或通信结束。
[0076]
示例性地,第一光通信设备10按照表2所示数据格式与和第二光通信设备20进行通信:
[0077]
表2
[0078][0079]
其中,序号表示第一光通信设备和第二光通信设备间通信消息的时序编号,光通信设备的标识为第一光通信设备的标识,小型无人平台的标识为第一光通信设备所在的小型无人平台的标识,发送单元开启标识用于指示发送单元的开启或关闭状态,接收单元开启标识用于指示接收单元的开启或关闭状态,锁定状态用于指示与第二光通信模块的通信链路是否对准,通信开始结束标志用于指示与第二光通信设备间的通信开始或通信结束,通信内容字节数和通信内容分别表示发送信息的长度和内容。
[0080]
在一些示例中,第一光通信设备10还包括时钟电路,用于控制发射模块101和接收模块102的处理时序。
[0081]
在本公开实施例中,水下无线光通信装置通过接收模块接收光信号,并对光信号进行解调得到光信号携带的数据信息,以及确定光信号的光斑坐标信息;通过辅助对准模块指示小型无人平台根据光信号携带的数据信息或光斑坐标信息进行偏转,以使水下无线光通信装置与另一水下无线光通信装置的通信链路对准。水下无线光通信装置无需配置二维伺服转台来转动调整水下无线光通信装置的发送和接收方向,该水下无线光通信装置结构简单、体积小,适用于小型无人平台。
[0082]
此外,光斑坐标信息用极坐标表示,清晰的表明水下无线光通信装置与另一水下无线光通信装置的通信链路偏移程度和偏移方向,小型无人平台进行偏转时更便捷。
[0083]
本公开实施例提供一种小型无人平台,该小型无人平台包括平台本体和水下无线光通信装置,该装置可以包括如图3所示结构,该装置安装在平台本体内,平台本体内对应装置的位置具有透明窗口。
[0084]
适用于小型无人平台的水下无线光通信装置的直径不超过18cm,长度不超过25cm,具有体积小、重量轻、功耗小等特点。示例性地,小型无人平台的最大直径不超过20cm且不小于水下无线光通信装置的直径,长度可以为1~3米。例如,小型无人平台的最大直径为18cm,长度为2m。
[0085]
在一些示例中,小型无人平台的控制器根据极径和极角的大小进行偏转。示例性地,根据极径和极角的大小,确定第一光通信设备偏离极点的距离和方向,小型无人平台的控制器调整自身姿态往极点位置靠近。
[0086]
在本公开实施例中,利用小型无人平台的控制器进行姿态调整,合理利用了小型无人平台灵活性的优点,易于姿态调整。
[0087]
图5是本公开实施例提供的一种水下无线光通信方法的流程图,该方法可以由放置于小型无人平台的水下无线光通信装置执行。例如,可以由图1或图2中的第一光通信设备10执行,该光通信设备的结构包括如图3所示的结构。参见图5,该方法包括:
[0088]
步骤501,接收光信号。
[0089]
在本公开实施例中,通过接收模块接收来自第二光通信设备的光信号。
[0090]
可选地,第一光通信设备在发射模块不工作的情况下,接收来自第二光通信设备的光信号。
[0091]
其中,发射模块不工作是指发射模块不发送光信号。
[0092]
可选地,在步骤501之前,该方法还包括发送承载握手信息的光信号。
[0093]
该握手信息用于通知第二光通信设备20,第一光通信设备10要进行通信并开始链路对准。
[0094]
步骤502,将光信号转换为电信号。
[0095]
在本公开实施例中,通过每路光电探测器10212将每路光信号转换为电信号,得到4路电信号。
[0096]
步骤503,根据电信号的电流值,确定光信号的光斑坐标信息。
[0097]
光斑坐标信息的计算方式参见上述装置实施例,此处省略详细过程。
[0098]
通过步骤502~503,实现确定光信号的光斑坐标信息。
[0099]
步骤504,对电信号进行解调得到光信号携带的数据信息。
[0100]
解调过程参见上述装置实施例,此处省略详细描述。
[0101]
步骤505,指示小型无人平台根据所述光斑坐标信息和/或所述光信号携带的数据信息进行偏转。
[0102]
小型无人平台的偏转过程参见上述装置实施例,此处省略详细描述。
[0103]
可选地,在通信链路对准之后,第一光通信设备和第二光通信设备之间即可进行数据通信。因此,该方法还包括:
[0104]
步骤506,发送承载水下信息的光信号。
[0105]
水下信息通过拍摄模块104采集,承载水下信息的光信号是由led光源1012产生的,通过发射光学元件组1011发送。
[0106]
可选地,第一光通信设备接收模块不工作的情况下,向第二光通信设备发送光信号。其中,接收模块不工作是指接收模块不接收光信号。
[0107]
发射模块和接收模块不同时工作,有利于减小发送光信号和接收光信号之间的干扰。
[0108]
在第一光通信设备接收光信号过程中,计算光信号的光斑坐标信息,如果光斑坐标信息的极径大于阈值半径时,说明第一光通信设备与第二光通信设备之间的通信链路发生偏移导致未对准,重复上述步骤501~步骤505,重新指示小型无人平台进行偏转,使第一光通信设备与第二光通信设备间的通信链路对准。
[0109]
下面对第一光通信设备与第二光通信设备的通信过程进行示例性说明。
[0110]
在一些示例中,第一光通信设备与第二光通信设备的通信过程如下:
[0111]
a1.第一光通信设备向第二光通信设备发送承载握手信息的光信号;
[0112]
a2.第二光通信设备向第一光通信设备发送承载握手信息的响应信息的光信号;
[0113]
a3.第一光通信设备根据该承载握手信息的响应信息的光信号,对所在小型无人平台进行偏转,以使第一光通信设备与第二光通信设备间的通信链路对准;
[0114]
a4.第一光通信设备向第二光通信设备发送承载水下信息的光信号。
[0115]
在另一些示例中,第一光通信设备与第二光通信设备的通信过程如下:
[0116]
b1.第二光通信设备向第一光通信设备发送承载握手信息的光信号;
[0117]
b2.第一光通信设备根据该承载握手信息的光信号,对所在小型无人平台进行偏转,以使第一光通信设备与第二光通信设备间的通信链路对准;
[0118]
b3.第一光通信设备向第二光通信设备发送承载握手信息的响应信息的光信号;
[0119]
b4.第二光通信设备向第一光通信设备发送承载数据信息的光信号。
[0120]
以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1