基于迭代扩展卡尔曼滤波器的毫米波自适应波束追踪方法
1.本发明属于数字通信技术领域,公布了一种基于迭代扩展卡尔曼滤波器的,解决了传统ekf必须已知状态转移方程噪声方差和观测方程噪声方差的问题,且能够自动调整波束追踪频率来适应毫米波信道主达径角度变化速率的毫米波波束追踪方法。
背景技术:
2.毫米波(mmwave)具有频带宽,对方向分辨率高等优点,是实现无线局域网、第五代蜂窝移动网络(5g)和车联网等高速通信应用的重要技术之一。但是毫米波信号的传播具有的路径损耗大的缺点。为了解决这一频段的高路径损耗问题,目前毫米波通信终端通常使用波束成形技术以提供信号传输的定向增益。而为了在通信过程中保持这种高波束成形增益,毫米波通信终端使用的波束方向必须始终与毫米波信道的主要路径方向对准。这种准确的波束对准通常可以通过波束训练获得。波束训练这种方法由于需要检验所有可能的方向,因此需要较高的时间和能量开销,仅适用于静态或者信道随时间缓慢变化等波束训练不需要频繁的执行的场景。但在快速变化的移动场景下,频繁的波束训练会导致过高的资源开销。其实,由于信道角度变化的连续性,某一时刻的信道角度与上一时刻角度往往存在关联。这意味着可以利用上一时刻的信道角度信息来对此时的信道角度进行估计。这样就可以避免全方向的波束搜索,能极大减小波束训练的开销。
3.目前常用的波束追踪算法有辅助波束对(auxiliary beam pair,abp)算法、扩展卡尔曼滤波器(extended kalman filter,ekf)算法等。辅助波束对算法利用在主波束附近的一对辅助波束对测量导频信号,通过计算最大接收信号强度和第二大接收信号强度之间的比率度量进行角度估计。这种方法在高信噪比下有很好的性能表现,但是在低信噪比情况下,由于辅助波束对会被错误的选择,可能出现严重的性能下降甚至丢失追踪。
4.扩展卡尔曼滤波器是卡尔曼滤波器在非线性情况下的一种扩展,在目标追踪领域有广泛的运用。卡尔曼滤波器对当前状态的估计需要以上一次的估计值为依据。所以现有的卡尔曼滤波器波束跟踪方法需要实时地、高频率地对系统状态进行估计,从而保证波束跟踪的精度。这在低移动速度的场景下会造成不必要的开销。而且,目前基于ekf的毫米波通信系统波束追踪方法选择的观测方程普便具有强非线性,这在线性化过程中会产生巨大高阶项损失。此外,现有用于波束追踪的卡尔曼滤波器的方法需要同时估计信道增益和信道的角度信息,这会导致误差相互影响、迅速累积,无法实现长时间的有效追踪。
5.为了解决上述的问题,需要设计一种波束追踪算法,可根据不同移动速度场景,自适应调节追踪频率,降低波束追踪的开销,且克服线性化损失和误差累积的问题,以延长有效追踪的时间。
技术实现要素:
6.本发明针对毫米波移动通信系统,公布了一种基于迭代扩展卡尔曼滤波器的毫米波自适应波束追踪方法。首先,该方法克服了扩展卡尔曼滤波器方法中通信系统观测方程
线性化导致的信息损失问题,提高了追踪精度。其次,该方法应用了一种基于残差的估计方法对观测方程噪声方差进行估计,和一种基于创新的估计方法对状态转移方程的噪声方差进行估计,解决了传统扩展卡尔曼滤波器中对模型要求高的问题。最后该方法可以根据毫米波信道角度变化的速率,实时调整波束追踪的频率,有效地降低了波束追踪的开销。
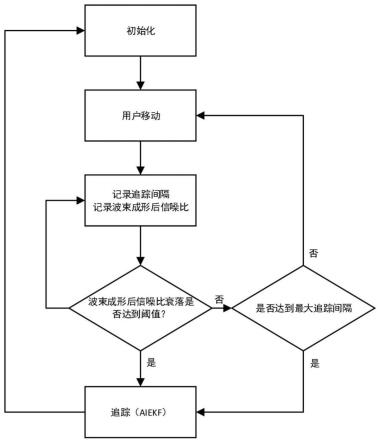
7.本发明采取以下技术方案:毫米波通信接收端rx接收毫米波通信发送端tx发送的导频信号,并实时计算当前时隙t使用波束成形后测量到的导频信号的信噪比ε
t
。如果ε
t
与上一次追踪后的值相比降低超过一定阈值,则使用迭代扩展卡尔曼滤波的方法对到达角(angle of arrive,aoa)和离开角(angle of departure,aod)进行估计。若距离上一次追踪的时隙间隔达到最大追踪间隔时时,仍未因ε
t
的衰减达到阈值而进行波束的更新,则强制进行更新,保证信道角度仍处于波束的覆盖范围内,降低丢失追踪的可能性。
8.基于迭代扩展卡尔曼滤波器的毫米波自适应波束追踪方法,其按如下步骤进行:
9.步骤1、确定接收信号的比率度量,作为iekf的观测方程;
10.步骤2、收集多次跟踪后地角度变化,根据角度变化地平均值计算角度变化速率,以确定两次追踪间最大时隙间隔。
11.步骤3、根据设定的波束成形后信噪比衰落的阈值和步骤2确定的最大追踪间隔判断是否需要进行追踪。
12.步骤4、使用iekf方法执行追踪。
13.其中较优地,步骤1所述接收信号比率度量为在接收波束附近的一对辅助波束对接收信号的强度的比率。
14.其中较优地,步骤2所述需确定的两次追踪间的间隔由指定波束宽度除以收集的每个角度变化的平均值计算。其中可以通过改变波束宽度来调整追踪的速率。
15.其中较优地,步骤4所述的迭代扩展卡尔曼滤波器方法与传统迭代扩展卡尔曼滤波方法相比,优点在于,所述iekf方法并不需要知道状态转移方程的噪声方差和观测方程的噪声方差,而是采用了一种迭代逼近的方法对它们进行估计。这极大地提高了iekf方法对不同运动模型的鲁棒性。
16.本发明有益效果如下:
17.本发明公布的自适应毫米波波束追踪算法,采用以监测波束成后信噪比的变化为主,辅以收集多次追踪间的角度变化信息确定最大追踪间隔的方法,在保证高追踪精度的同时,实现了根据通信信道角度的变化速率的自适应调整追踪频率,显著降低了波束追踪中的开销。该方法即使在信道角度变化复杂和低信噪比情况下都能保证优秀的追踪效果。
附图说明
18.图1为本发明自适应波束追踪算法的流程图;
19.图2为第一实施例情况下,本发明提供的方法的500个时隙的追踪结果;
20.图3为第一实施例情况下,本发明提供的方法与其他常用方法的精度对比,图4 是其开销对比。
21.图5为第二实施例情况下,本发明提供的方法的追踪结果。
22.图6为第二实施例情况下,本发明提供的方法重新对准所在时隙的情况;表2 是其与atsc算法的开销对比。
具体实施例
23.下面结合附图和具体实施例对本发明的技术内容作进一步说明。
24.《第一实施例》
25.在本发明的第一个实施例中,考虑一个毫米波通信基站,即tx端,与一个毫米波通信移动终端,即rx之间的波束跟踪。定义φ为信道在rx端的到达角,为φ的估计值,为rx端的波束成形指向方向,ψ为信道在tx端的离开角,为ψ的估计值,为tx端的波束成形指向方向。在本实施例中,只考虑移动终端的波束追踪,即假设基站的波束在波束训练过程中始终对准信道的出发角方向使用一个状态演化方程模拟信道移动终端的角度变化,状态演化方程描述为:
26.φ
t
=φ
t-1
+ω
t-1
+n
t-1
#(1)
27.下标t代表第t个时隙。其中,ω
t
为信道角度每次变化的固定值,是一个常数,n
t
服从均值为0,方差为的高斯分布,即
28.在本发明的第一个实施例中,考虑以下毫米波通信场景:定义n
t
为基站tx的天线数,nr为移动终端rx天线数。a
t
(.)和ar(.)分别为基站和移动终端的天线阵列响应矢量,信道增益系数为α,表示矢量的共轭转置。定义v=2πdrsin(φ)/λ和 u=2πd
t
sin(ψ)/λ分别为信道到达角和离开角的空间频率,其中d
t
和dr分别代表基站和移动终端天线之间的距离,λ为载波频率对应的波长。定义λ为载波频率对应的波长。定义和为基站和移动终端主波束的视轴角的空间频率。
29.本实施例在移动终端使用一对辅助波束对测量导频信号,分别指向η
r-δr和ηr+ δr,δr表示在移动终端的空间频率域辅助波束对与视轴角η之间的夹角。令表示在移动终端的空间频率域辅助波束对与视轴角η之间的夹角。令为tx和rx之间的信道矩阵,信道表达式如下所示:
[0030][0031]
定义和分别为基站和移动终端的波束成形矢量,为导频信号,为噪声矢量,f和w的表达式如下所示:
[0032][0033][0034]
则这一对波束对应的接收信号分别为:
[0035]yδ
=w(η-δr)hfs+z
δ
[0036]y∑
=w(η+δr)hfs+z
∑
[0037]
其中,z
δ
和z
∑
为相互独立的噪声矢量,服从均值为0,方差为的复高斯分布。
[0038]
相应的接收信号的强度可以计算为:
[0039][0040]
步骤1.计算辅助波束对的比率度量。
[0041]
步骤1所述的辅助波束对的比率度量计算如下:
[0042][0043]
使用此比率度量作为ekf的观测方程。当噪声影响可忽略时,使用此比率度量作为ekf的观测方程。当噪声影响可忽略时,因此,时隙t测量到的比率度量ξ
t
可重新建模如下:
[0044][0045]
其中,v(t)=2πdrsin(φ(t))/λ,w
t
服从均值为0,方差为的高斯分布。
[0046]
步骤2.收集n次追踪间角度变化信息,估算信道角度变化的平均速率,以确定最大追踪间隔t
max
。
[0047]
假设每两次追踪之间存在tf个时隙,其集合表示为:γf(t)={t,t-1,t
‑ꢀ
2,...,t-(t
f-1)},则这tf个时隙的估计角度的变化均值可由下式给出:
[0048][0049]
则可由此估计的最大追踪间隔为:
[0050][0051]
其中,表示到达角φ的估计值,br=1/nr,约为移动终端波束宽度的一半。
[0052]
步骤3.计算波束成形后信噪比,根据以下两个条件判定是否需要执行追踪。
[0053]
条件-(1):如果波束成形后信噪比与t个时隙前相比,衰落超过阈值,即|ε
t
‑ꢀ
ε
t-t
|>γ,γ为设定的阈值。
[0054]
条件-(2):两次追踪间的时隙间隔达到步骤2所述的最大时隙间隔,即t =t
max
。
[0055]
每个时隙t的波束成形后信噪比ε
t
与发射功率p
t
=||s(t)||2、噪声方差的关系如下:
[0056][0057]
其中,s(t)为第t个时隙发射的导频序列。
[0058]
步骤4.使用iekf方法执行波束追踪。
[0059]
步骤4-1一步预测估计角度更新:
[0060][0061]
其中,为上一次追踪的角度估计值。
[0062]
步骤4-2一步预测协方差更新:
[0063]
p
t|t-t
=p
t-t|t-t
+t
·qest,t-t
#(8)
[0064]
其中,t为与上一次追踪行为之间的时隙间隔,q
est
为估计的演化方程噪声的协方差矩阵。p
t-t|t-t
为上一次追踪的协方差矩阵;
[0065]
步骤4-3.iekf迭代,令最大迭代次数为k,i为迭代索引。
[0066]
步骤4-3-1:计算卡尔曼增益:
[0067][0068]
其中,r
est
为估计的观测方程噪声的协方差矩阵。(.)h表示矩阵的转置,c
t,i
的计算如下:
[0069][0070]
步骤4-3-2:计算角度估计值:
[0071][0072]
其中,
[0073]
步骤4-3-3:计算协方差矩阵:
[0074]
p
t|t,i
=(i-k
t,ict,i
)p
t|t-t
#(11)
[0075]
其中,i是单位矩阵。
[0076]
步骤4-3-4:计算第i次迭代的状态演化方程的协方差q
est,t,i
:
[0077]qest,t,i
=k
t,i
eehk
t,i
#(12)
[0078]
其中
[0079]
步骤4-3-5:计算第i次迭代的观测方程的协方差r
est,t,i
:
[0080][0081]
在结束iekf迭代之后,计算下一次追踪所需的状态演化方程的协方差q
est,t
和观测方程的协方差r
est,t
。步骤如下:
[0082]
步骤4.4计算下一次追踪的状态演化方程的协方差q
est,t
:
[0083][0084]
步骤4.5计算下一次追踪的观测方程的协方差r
est,t
:
[0085][0086]
其中,c为更新次数,b为常数,取值范围一般为0.95~0.99。下标t 为时
隙索引,下标i为iekf的迭代索引。
[0087]
步骤4.6在iekf迭代结束后,更新波束角度,更新波束角度,为iekf最后一次迭代时的角度估计值i=n,将t初始化为0;等待下一个时隙t+t,并返回步骤4.1。
[0088]
《第二实施例》
[0089]
在本发明的第二个实施例中,同时考虑基站端tx和移动通信终端rx的波束追踪情况。基站端和移动终端的角度变化均由高精度ray-tracing软件根据移动终端相对于基站端的运动速度模拟而来。模拟参数如表1所示。本实施例具体实施步骤如下:
[0090]
步骤1:使用ray-tracing软件,根据表1的参数设置生成毫米波移动终端相对于基站端的角度变化数据(以下简称为基站和移动终端),并使用matlab对其进行插值处理,每个时隙设置为0.5ms,最终生成约4.1
×
104个时隙。获取基站和移动终端的初始角度。
[0091]
步骤2:使用第一实施例中步骤2所述方法分别确定基站和移动终端的最大追踪间隔。
[0092]
步骤3:使用第一实施例中步骤3所述方法分别测量基站和移动终端的波束成形后信噪比。若满足以下任一条件:条件-(1)某一边的波束成形后信噪比的衰落超过设定的阈值γ1,执行步骤4的追踪流程;条件-(2)任意一边两次追踪间的时隙间隔达到步骤2所述的最大时隙间隔,则执行步骤4所述追踪流程。
[0093]
步骤4:使用第一实施例中步骤4所述方法分别对基站和移动终端的主要路径角度进行追踪。
[0094]
步骤5:根据波束成形后信噪比的衰落判断是否已经丢失追踪,设定的阈值为γ2,如果判定丢失追踪,需要使用波束搜索的方法进行波束对准,在本实施例中,为了方便起见,由于已有信道角度数据,直接将波束方向对准信道。
[0095]
仿真结果及分析:
[0096]
第一实施例参数设定:设置总时隙数n=500,tx天线数n
t
=1,rx天线数为 nr=64,信道初始方向φ以及波束成形方向初始值为π/4,信道为莱斯信道且只有一条视距路径,即路径数l=1。定义波束角度偏离信道造成的波束成形后信噪比的损失为阈值γ,单位为db,定义br=1/nr,约为半波束宽度。
[0097]
图2显示了500个时隙内的追踪结果。参数设置为天线数量nr=64,固定步长ω
t-1
=0.1*bt,扰动n
t
的方差snr=-10db,导频信号长度为16,辅助波束对角度为δr=br,设置波束成形后信噪比的损失的阈值γ=br。
[0098]
图3显示了本发明所提出的算法与atsc算法和ekf算法(已知运动方程扰动方差,固定步长和观测噪声方差)的精度比较。图4是它们的开销对比。从图中可见,在开销保持基本一致的情况下,该方法仍然具有较高的精度。
[0099]
第二实施例参数设定:tx天线数n
t
=32,rx天线数为nr=32,其他参数设定见表1。
[0100]
图4、图5显示了在ray-tracing模拟真实信道变化的情况下,使用本发明提供的方法进行波束追踪的结果。由图中可以看出,直到第0.37
×
104个时隙,本方法都成功的追踪到了主要的非视距路径,而在约第0.93
×
104个时隙,用户移动的角速度突然增加时,本方法依然能够快速地进行追踪。且在约第3.5
×
104个时隙处, los信道消失,主要信道变为
nlos信道时,本方法依然能够准确地跟踪到信道。而在3.75
×
104时隙之后,由于nlos信道十分衰弱且用户移动速度较快,所以导致波束重新校准的频繁发生。但即使是这样,本方法依然能够追踪到信道,使有效信道增益达到上限。如图6和表2所示,表2是本方法与atsc算法(此算法可参阅如下论文:liu,c.,li,m.,zhao,l.,whiting,p.,hanly,s.v.,collings,i.b.,&zhao, m.(2020).robust adaptive beam tracking for mobile millimetre wave communications. ieee transactions onwireless communications,20(3),1918-1934.)开销对比,由表可知,本发明提供的方法可以显著地降低波束追踪地开销。
[0101]
表1
[0102]
基站高度5m传输功率30dbm用户轨迹长度410m用户端高度1.5m热噪声-99dbm时隙间隔0.5ms天线数32noise figure9.1db用户移动速度72km/h
[0103]
表2
[0104] atsciekf追踪次数494198重新对准次数127
[0105]
综上所述,高频率的追踪能提高追踪的精度,但势必会造成开销的增大。本发明通过自适应调整波束追踪的频率从而适应信道角度的变化速率,在保证波束跟踪精度的情况下,可以有效的降低开销,且面对复杂地信道变化场景,能有效地保持追踪,具有很好的鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1