一种误码率测试方法及系统与流程
1.本发明涉及航天器测试技术领域,具体来说,涉及一种误码率测试方法及系统。
背景技术:
2.遥感卫星地面接收系统具备接收遥感卫星数据的能力,对遥感卫星数据的广泛应用发挥着重要的作用。随着发射遥感卫星的数量逐步增多,遥感卫星接收模式也越来越多,同时地面接收站规模也越来越大,系统间设备级联,切换关系复杂,地面接收系统误码率测试工作量也随之增大,测试人员面临高强度的测试压力。
3.误码率是地面接收系统最重要的指标之一,需要覆盖卫星接收配置、码速率、译码方式、接收通道等等多种组合模式,以往测试为工作时间人工测试,测试压力大。为提高地面接收系统的测试效率,解放工作人员的测试压力,提高测试效率低,需要提出一种新的误码率测试方法。
技术实现要素:
4.针对相关技术中的问题,本发明提出一种误码率测试方法及系统,能够有效解放工作人员测试压力、提高系统测试效率、间接提高地面站的使用效能,具有流程简单、操作性强、可扩展性强的特点。
5.本发明的技术方案是这样实现的:根据本发明的一方面,提供了一种误码率测试方法。
6.该误码率测试方法,包括:与遥感卫星地面接收系统建立待测误码率环路,并对待测误码率环路进行参数配置;待测误码率环路建立后,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平;根据所述最小待测误码率调制器初值电平,确定待测误码率调制器,并计算待测误码率调制器步进调节时的实测eb/n0,得到待测误码率调制器所对应的实测eb/n0;根据待测误码率调制器所对应的实测eb/n0,生成实测误码率曲线,并根据待测误码率理论值,生成理论值曲线;根据实测误码率曲线,插入待测误码率调制器所对应的实测eb/n0值,并与理论值曲线进行比较,得到待测误码率解调损耗。
7.可选的,所述参数包括链路参数和调制解调参数,其中,所述链路参数包括环路选择以及对应的频率、链路增益;所述调制解调参数包括解调方式、相位映射、码速率、码型、帧同步、编译码。
8.进一步的,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平包括:通过频谱仪测量所述待测误码率环路的实测eb/n0值;将该实测eb/n0值与最小待测误码率理论值比较,确定最小待测误码率
调制器初值电平。
9.进一步的,该误码率测试方法,还包括:在调制器发射电平可调范围内均未出现待测误码率的情况下,通过叠加调制器噪音,动态调整步进量,得到覆盖所有待测误码率的电平值。
10.进一步的,该误码率测试方法,还包括:对得到待测误码率解调损耗进行表格显示,对误码率曲线进行图形显示。
11.根据本发明的另一方面,提供了一种误码率测试系统。
12.该误码率测试系统,包括:环路配置模块,用于与遥感卫星地面接收系统建立待测误码率环路,并对待测误码率环路进行参数配置;初值电平确定模块,用于待测误码率环路建立后,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平;误码率
‑ꢀ
eb/n0计算模块,用于根据所述最小待测误码率调制器初值电平,确定待测误码率调制器,并计算待测误码率调制器步进调节时的实测eb/n0,得到待测误码率调制器所对应的实测eb/n0;曲线生成模块,用于根据待测误码率调制器所对应的实测eb/n0,生成实测误码率曲线,并根据待测误码率理论值,生成理论值曲线;曲线插值比较模块,用于根据实测误码率曲线,插入待测误码率调制器所对应的实测eb/n0值,并与理论值曲线进行比较,得到待测误码率解调损耗。
13.可选的,所述参数包括链路参数和调制解调参数,其中,所述链路参数包括环路选择以及对应的频率、链路增益;所述调制解调参数包括解调方式、相位映射、码速率、码型、帧同步、编译码。
14.进一步的,所述初值电平确定模块包括:eb/n0测量子模块、初值电平确定子模块;所述eb/n0测量子模块,用于通过频谱仪测量所述待测误码率环路的实测eb/n0值;所述初值电平确定子模块,用于将该实测eb/n0值与最小待测误码率理论值比较,确定最小待测误码率调制器初值电平。
15.进一步的,该误码率测试系统,还包括:步进调整模块,用于在调制器发射电平可调范围内均未出现待测误码率的情况下,通过叠加调制器噪音,动态调整步进量,得到覆盖所有待测误码率的电平值。
16.进一步的,该误码率测试系统,还包括:显示模块,用于对得到待测误码率解调损耗进行表格显示,对误码率曲线进行图形显示。
17.有益效果:本发明针对我国现有遥感卫星地面接收站人工手动测试误码率测试压力大的实际困难,基于步进调整调制器发射电平/噪声方法,实现误码率的本地/远程自动化测试,减小对操作人员依赖的同时,具备24小时不间断测试能力,大幅提高测试效率,尤其适用于自动化运行无人值守站。
18.本发明对准确待测误码率对应eb/n0提供了求解方法,该求解方法采用插值曲线算法准确拟合出待测误码率,解决了现有测试采用近似误码率的误差性,同时避免了高增益编译码“瀑布效应”不能准确找到待测误码量级,准确度更高。此外,本发明还具有良好的通用性和可扩展性。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1是根据本发明实施例的误码率测试方法的流程示意图;图2是根据本发明实施例的误码率测试系统的结构框图;图3是根据本发明实施例的误码率测试方法实施时的流程图;图4是根据本发明实施例的调制器调制电平/噪声步进调节初值算法流程图;图5是根据本发明实施例的步进调节误码率-eb/n0实测的流程图。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
22.根据本发明的实施例,提供了一种误码率测试方法及系统。
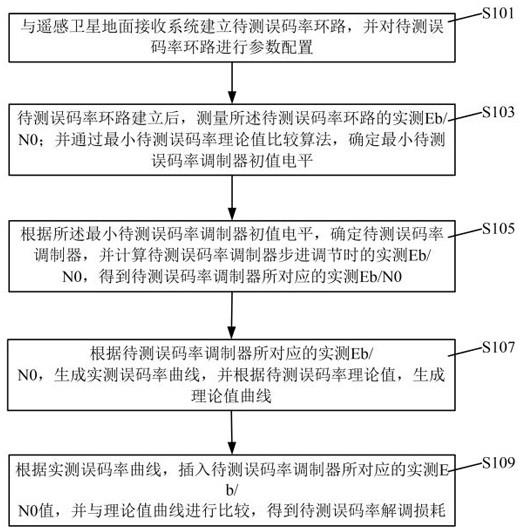
23.如图1所示,根据本发明实施例的一种误码率测试方法,包括:步骤s101,与遥感卫星地面接收系统建立待测误码率环路,并对待测误码率环路进行参数配置;步骤s103,待测误码率环路建立后,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平;步骤s105,根据所述最小待测误码率调制器初值电平,确定待测误码率调制器,并计算待测误码率调制器步进调节时的实测eb/n0,得到待测误码率调制器所对应的实测eb/n0;步骤s107,根据待测误码率调制器所对应的实测eb/n0,生成实测误码率曲线,并根据待测误码率理论值,生成理论值曲线;步骤s109,根据实测误码率曲线,插入待测误码率调制器所对应的实测eb/n0值,并与理论值曲线进行比较,得到待测误码率解调损耗。
24.在一个实施例中,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平包括:通过频谱仪测量所述待测误码率环路的实测eb/n0值;将该实测eb/n0值与最小待测误码率理论值比较,确定最小待测误码率调制器初值电平。且误码率测试方法,还包括:在调制器发射电平可调范围内均未出现待测误码率的情况下,通过叠加调制器噪音,动态调整步进量,得到覆盖所有待测误码率的电平值。同时,误码率测试方法也可包括:对得到待测误码率解调损耗进行表格显示,对误码率曲线进行图形显示。
25.如图2所示,根据本发明实施例的一种误码率测试系统,包括:环路配置模块201,用于与遥感卫星地面接收系统建立待测误码率环路,并对待测误码率环路进行参数配置;
初值电平确定模块203,用于待测误码率环路建立后,测量所述待测误码率环路的实测eb/n0;并通过最小待测误码率理论值比较算法,确定最小待测误码率调制器初值电平;误码率
‑ꢀ
eb/n0计算模块205,用于根据所述最小待测误码率调制器初值电平,确定待测误码率调制器,并计算待测误码率调制器步进调节时的实测eb/n0,得到待测误码率调制器所对应的实测eb/n0;曲线生成模块207,用于根据待测误码率调制器所对应的实测eb/n0,生成实测误码率曲线,并根据待测误码率理论值,生成理论值曲线;曲线插值比较模块209,用于根据实测误码率曲线,插入待测误码率调制器所对应的实测eb/n0值,并与理论值曲线进行比较,得到待测误码率解调损耗。
26.在一个实施例中,所述初值电平确定模块包括:eb/n0测量子模块(图中未视出)、初值电平确定子模块(图中未视出);所述eb/n0测量子模块,用于通过频谱仪测量所述待测误码率环路的实测eb/n0值;所述初值电平确定子模块,用于将该实测eb/n0值与最小待测误码率理论值比较,确定最小待测误码率调制器初值电平。此外,该误码率测试系统还可包括:步进调整模块(图中未视出),用于在调制器发射电平可调范围内均未出现待测误码率的情况下,通过叠加调制器噪音,动态调整步进量,得到覆盖所有待测误码率的电平值。同时,误码率测试系统也可包括:显示模块(图中未视出),用于对得到待测误码率解调损耗进行表格显示,对误码率曲线进行图形显示。
27.为了方便理解本发明的上述技术方案,以下通过具体实例,对本发明的上述技术方案进行详细说明。
28.参考图3所示,本实施例所述的针对遥感卫星地面接收系统的误码率测试方法,主要包括如下步骤:任务创建:手动或自动配置待测误码率环路及参数配置,自动化测试软件根据一定策略向系统监控软件进行任务申请,等待系统监控软件故障检测及冲突消解,反馈任务创建成功/失败。参数下发:任务开始后自动化测试软件立即下发所有参数配置,并判断下发是否成功,如某分机存在下发失败项,则再次下发,下发三次均失败,终止任务流程,判断任务失败。步进调节初值计算:链路搭建完成,解调器各项锁定状态正常后,仪器算法测量此时链路实测eb/n0,通过与最小待测误码率理论值比较算法,快速得出出现最小待测误码率调制器初值电平,如在调制器发射电平可调范围内均未出现待测误码率,通过叠加调制器噪声综合调整。按照参数配置的步进值,动态调整步进量,得到覆盖所有待测误码率的电平值。步进调节实测eb/n0值计算:仪器算法测量每一次步进调整对应误码率链路实测eb/n0,并将结果截图保存。误码率
‑‑ꢀ
eb/n0曲线生成:将所有实测eb/n0,描绘误码率曲线;将待测误码率理论值描绘误码率曲线。插值曲线得出待测结果:通过实测误码率曲线插值,得到准确待测误码率对应的实测eb/n0值,并与理论值相比较,得出准确待测误码率对应系统解调损耗。
29.具体扩展步骤可如下所示:s1、手动配置或结合卫星接收任务系统自动化任务诊断触发自动配置待测误码率环路及参数配置。参数一般包括链路参数以及调制及解调参数;链路参数一般包括环路选择以及对应的频率、链路增益等;调制及解调参数一般包括解调方式、相位映射、码速率、码型、帧同步、编译码等参数。
30.s2、任务开始下发所选参数,判断参数下发是否正常,正常则往下执行,三次下发均异常则报错xx参数下发失败并结束测试。
31.s3、打开调制器输出载波信号,并将解调器误码统计状态清零,等待5秒(脚本中可编辑),判断解调器载波、码元、帧同步(分路/合路)、维特比译码(分路/合路)/rs译码(分路/合路)/ldpc译码(分路/合路)是否锁定,锁定则往下执行,否则报错xx失锁,关闭信号结束。
32.s4、步进调节初值计算,仪器算法测量此时链路实测eb/n0,通过与最小待测误码率理论值比较算法,快速得出出现最小待测误码率调制器初值电平,如图4所示,具体包括:s41、计算实测eb/n0值:s411、设置频谱仪为channelpower模式、中心频率、积分带宽、谱仪截图命令等参数;积分带宽计算方法如下:integ bw=*2;rb为比特速率,n为符号数。
33.具体对应关系如下表所示:s412、获取此时频谱仪channelpower值记为p1,关闭调制器电平开关,获取频谱仪channelpower值记为p2,根据以下公式计算实测eb/n0_act;;其中,ib为信息速率,与译码方式有关,且上述公式经转换可直观表达如下:补偿eb/n0=2/n,n为符号数;当维比特译码打开时,补偿viterbi等于viterbi打孔的值(例如打孔值为1/2,则补偿viterbi=1/2);否则,补偿viterbi =1;当rs译码打开时,补偿rs等于rs有效位/码长(例如选择rs(255,239),则补偿rs=239/255);否则,补偿rs =1;
当ldpc译码打开时,补偿ldpc等于ldpc有效位/码长(例如选择ldpc(7,8),则补偿ldpc=7/8);否则,补偿rs =1;s413,打开调制器电平开关,获取最小待测误码量级理论值eb/n0_stand。
34.s42、计算初步调整值:s421、计算调制器发射电平初步调整步进值level_step=(eb/n0_act-eb/n0_stand)*0.5;s422、计算调制器电平初步调整值level=level-level_step;s423、判断电平初步调整值level是否超限(-50≤level≤0),不超限则给调制器下发电平初步调整值,如超限,则打开噪声开关,噪声功率加1,给调制器下发噪声功率,再次获取此时实测eb\n0_act;s424、判断电平初步调整步进值level_step是否≤1,≤1则执行下述步骤,大于1则循环s421
‑‑ꢀ
s423步骤;s425、下发解调器清零命令,并获取解调器上报ber值;s426、判断解调器ber是否小于最小待测误码率,是则进入下述步进调节误码率—eb/n0实测分支算法,否则调整调制器发射电平=当前值-1,三次循环调整仍不满足则关闭调制器调制电平及噪声源,报错结束测试流程。
35.s5、步进调节实测eb/n0值计算,如图5所示,包括:s51、计算调制器调整电平=当前电平初值-设定步进值;s52、判断调制器电平是否超限,不超限,下发调制器电平,并记录电平值,如超限,报错退出测试;s53、解调器ber清零,获取解调器ber值;s54、当前获取的解调器ber值是否大于等于最大待测误码率(步进循环退出标志),是则执行下述步骤,否则重复s51
‑‑ꢀ
s53步骤;s55、将覆盖满足待测误码率记录的调制器步进电平值,依次下发给调制器,获取频谱仪channel power值即为signalpower,关闭调制器电平开关,获取频谱仪channel power值即为noisepower,根据s412步骤中方法计算各误码率下实测eb/n0值。
36.s6、根据实测误码率对应的计算eb/n0拟合生成实测误码率曲线,根据理论值生成理论值曲线。
37.s7、根据拟合曲线,插入待测误码率获取实测的eb/n0,与eb/n0理论值进行比较得到解调损耗,表格显示测试结果,图形显示误码率曲线。
38.综上所述,借助于本发明的上述技术方案,本发明基于步进调整调制器发射电平/噪声方法,实现误码率的本地/远程自动化测试,减小对操作人员依赖的同时,具备24小时不间断测试能力,大幅提高测试效率,尤其适用于自动化运行无人值守站。本发明对准确待测误码率对应eb/n0提供了求解方法,该求解方法采用插值曲线算法准确拟合出待测误码率,解决了现有测试采用近似误码率的误差性,同时避免了高增益编译码“瀑布效应”不能准确找到待测误码量级,准确度更高。
39.此外,本发明还具有良好的通用性和可扩展性以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1