一种工业相机暗角标定方法和装置与流程
1.本技术涉及光学成像技术领域,具体而言,涉及一种工业相机暗角标定方法和装置。
背景技术:
2.自动光学检测为工业自动化有效的检测方法,使用工业相机为平台的机器视觉作为检测标准技术,大量应用于印刷包装质量管控、pcb检测、快速成型等制造领域上。
3.随着自动光学检测的适用行业范围越来越广,对采集的图像质量要求也越来越高。采集的图像中,由于光学系统结构、性能等原因,会存在拍摄均匀明场图像灰度值由中心向四周逐渐降低的“暗角”的现象。暗角现象随着相机sensor靶面的增加越发明显。暗角现象所导致图像的非均匀性导致处于图像边缘处的目标特征产生失真,增加了后期图像处理的难度,同时也增加了缺陷的误检和漏检,对系统稳定性带来负面影响。
4.当前工业相机的暗角校正方案存在计算和存储资源占用量大,适应性差,校正效果不稳定等问题。
技术实现要素:
5.本技术的目的在于:设计合适的矫正模型应用工业相机的暗角矫正,在出厂时就导入参数式,减少用户的标定流程。
6.本技术的技术方案是:提供了一种工业相机暗角标定方法,该方法包括:
7.设定待标定相机的预设采集灰度,对均匀照射的平面光源使用待标定相机采集一张光源图像;
8.设置栅格将光源图像划分为相同大小的若干栅格区域,计算每个栅格区域的平均灰度值;
9.在每一行根据相邻的栅格区域的平均灰度值变化寻找该行平均灰度值变化曲线的非线性和线性的交汇点作为该行的拐点;
10.基于所有行的拐点对光源图像划分,将光源图像中的拐点内栅格区域划分为非线性区域,拐点外栅格区域划分为线性区域,其中对非线性区域应用多项式模型处理,对线性区域应用融合模型处理,获得每个栅格区域j的标定系数fj写入待标定相机后出厂;
11.待标定相机使用时根据用户设定的浮点数n以及标定系数fj,使用矫正系数fj=f
jn
对待标定相机标定。
12.上述任一项技术方案中,进一步地,寻找平均灰度值变化曲线的非线性和线性的交汇点步骤包括:将一行中各个栅格区域的平均灰度值按序排列作一条曲线,对曲线进行均值滤波,使用偶数卷积核对均值滤波后的曲线求取二阶导,得到二阶导的两个最大值,当最大值大于预设阈值时将其作为交汇点,否则作废。
13.上述任一项技术方案中,进一步地,多项式模型用于对由于光线斜射导致的边缘暗角进行补强矫正,对坐标为(x,y)的一点,校正系数f=(1+a*(x-x0+xd)2+b*(y-y0+yd)2)2,
其中,(x0,y0)为相机成像面的中心坐标,(xd,yd)为像素的坐标,a和b为可调节参数。
14.上述任一项技术方案中,进一步地,融合模型对环形遮挡的区域进行补强矫正,对该区域内坐标为(x,y)的一点,矫正系数其中k1为横坐标方向的三次项矫正强度,k2为纵坐标方向的三次项矫正强度。
15.上述任一项技术方案中,进一步地,相机使用时,当用户指定环形遮挡的遮挡半径r,相机取消出厂时设置的非线性区域和线性区域的划分,对距离图像中心距离小于遮挡半径r的区域应用多项式模型处理,其余区域使用融合模型处理。
16.上述任一项技术方案中,进一步地,在待标定相机采集一张光源图像前,对待标定相机进行去噪标定,去噪标定步骤包括:采集待标定相机第i列的感光特性曲线并拟合其在该曲线上的灰度截距作为第i列灰度值的偏置值offseti,将感光特性曲线斜率ki的平均值作为标定目标值k
mean
,计算并关于其最小值进行归一化保证全部大于1,保证图像能够饱和,得到对于第i列灰度值所需的放大倍数gaini;
17.当检测到对于待标定相机的每一列,其所需最大的放大倍数gaini不超过预定阈值时,启动随机标定方案通过打破感光特性曲线斜率和偏置的周期分布的方式消除人眼可见的噪声,否则将每列偏置值offseti和放大倍数gaini写入待标定相机完成去噪标定。
18.上述任一项技术方案中,进一步地,随机标定方案包括:计算偏置值周期,将小于周期内偏置值平均值的列标定为暗列,否则标定为亮列,暗列与同一周期内偏置值最大亮列的灰度差异小于2则随机替换为同一周期内任意亮列的偏置值,否则不进行处理。
19.上述任一项技术方案中,进一步地,去噪标定中同时采集标准相机与待标定相机的感光特性曲线,面光源放置于可旋转的平台上,每进行一定时间的曝光后旋转平台使标准相机与待标定相机的光源位置互换再继续曝光,直至标准相机和待标定相机过曝。
20.上述任一项技术方案中,进一步地,去噪标定步骤还包括:将待标定相机与标准相机的感光特性曲线调整一致,求出待标定相机每列感光特性曲线斜率的平均值k
mean
和标准相机每列感光特性曲线斜率的平均值k
standard
,得到待标定相机的整体增益写入待标定相机。
21.还提供了一种用于执行上述任一项工业相机暗角标定方法的装置,该装置包括:面光源和旋转台,面光源固定在旋转台上跟随其旋转,标准相机和待标定相机位于同一高度,标准相机和待标定相机的镜头方向与面光源的表面垂直。
22.本技术的有益效果是:
23.本技术中的技术方案在出厂前预先向相机种导入多项式模型和融合模型两种模型对不同暗角原理的情况进行矫正,用户仅需调整部分参数,减少了大量用户的后续标定步骤;用户可以自行调整相机的浮点数n以随时调整暗角的矫正强度。
附图说明
24.本技术的上述和附加方面的优点在结合下面附图对实施例的描述中将变得明显
和容易理解,其中:
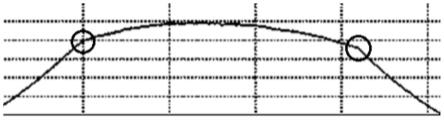
25.图1是根据本技术的一个实施例的工业相机暗角标定方法的暗角分布示意图;
26.图2是根据本技术的一个实施例的工业相机暗角标定方法的栅格示意图;
27.图3是根据本技术的一个实施例的工业相机暗角标定方法的环形遮挡示意图;
28.图4是根据本技术的一个实施例的工业相机暗角标定方法的多项式模型推导图;
29.图5是根据本技术的一个实施例的工业相机暗角标定方法的浮点数n调节影响示意图。
具体实施方式
30.为了能够更清楚地理解本技术的上述目的、特征和优点,下面结合附图和具体实施方式对本技术进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互结合。
31.在下面的描述中,阐述了很多具体细节以便于充分理解本技术,但是,本技术还可以采用其他不同于在此描述的其他方式来实施,因此,本技术的保护范围并不受下面公开的具体实施例的限制。
32.本实施例提供了一种工业相机暗角标定方法,该方法包括:对待标定相机完成去噪标定后,将待标定相机的预设采集灰度值设为120,镜头面对均匀照射的平面光源采集光源图像。
33.设置栅格将光源图像划分为相同大小的若干栅格区域,计算每个栅格区域的平均灰度值,在每一行根据相邻栅格区域的平均灰度值变化寻找该行平均灰度值变化曲线的非线性和线性的交汇点作为该行的拐点,基于所有行的拐点对光源图像进行划分,将光源图像中的拐点内栅格区域划分为非线性区域,拐点外栅格区域划分为线性区域,其中对非线性区域应用多项式模型处理,对线性区域应用融合模型处理,获得每个栅格区域j的标定系数fj写入待标定相机后出厂。
34.该相机使用时,根据用户设定的浮点数n以及标定系数fj,使用矫正系数fj=f
jn
对待标定相机标定,n越大,图像边缘亮度越高。
35.如图1和图2所示,设置栅格并求解每个栅格区域的平均灰度值后,将一行中各个栅格区域的平均灰度值按序排列作一条平均灰度值变化曲线,曲线存在两个明显的拐点,也就是非线性和线性的交汇点,确定该交汇点位置的步骤包括:对曲线进行均值滤波,使用偶数卷积核对均值滤波后的曲线求取二阶导,得到二阶导的两个最大值,当最大值大于预设阈值时将其作为交汇点,否则作废;在本实施例中,卷积核的大小设置为6,卷积核表示为[-1,-1,-1,1,1,1],待求二阶导的曲线是一维的,故卷积核页是一维的,应用上述卷积核对曲线卷积两次即可得到二阶导。
[0036]
具体地,如图3所示,工业相机实际使用时经常会出现由镜头外框等造成的环形遮挡情况,极大地增加了边缘暗度,遮挡与非遮挡在图像上的分界点对应着平均灰度曲线线性与非线性的拐点。
[0037]
多项式模型用于对由于光线斜射导致的边缘暗角进行补强矫正,如图4所示,一条光线通过小孔成像原理进入成像面后,光线有对成像面的垂直分量φ,另外相机拍摄中心点与光源点的距离为r,光源点至光心面的垂直距离为l,光线与中线的夹角为t,定义t=0
时光线的垂直分量为φ0,那么光线在成像面上各位置的垂直分量φ=φ0×
cos(t),夹角t可以表示为t=acr tan(r/l),当l远大于r时,acr tan(r/l)趋近于r/l,t也趋近于0;cos(t)在t0=0处泰勒展开代入φ=φ0×
cos(t)得φ=φ0×
(1+c1(x-x0)2+c2(y-y0)2+(c3(x-x0)2+c4(y-y0)2)2),其中c1、c2、c3和c4为多项式中各项的系数,数值越大表示对应项亮度降低的倍率越小,其亮度越高。
[0038]
垂直分量代表着着不同位置的光线强度,φ0为最亮的区域,设置此处得矫正系数为1,上式中(1+c1(x-x0)2+c2(y-y0)2+(c3(x-x0)2+c4(y-y0)2)2)是其他区域相对于最亮区域亮度降低的倍率,因此取其倒数即是校正系数f:
[0039][0040]
记k=c1(x-x0)2+c2(y-y0)2+(c3(x-x0)2+c4(y-y0)2)2得:
[0041]
当k->0时f->1-k
[0042]
f=(1+a1(x-x0)2+a2(y-y0)2+(a3(x-x0)2+a4(y-y0)2)2)
[0043]
其中,a1、a2、a3和a4为多项式中各项的系数,亮度越小时其数值越大,表示对应项矫正强度越大。
[0044]
暗角在一般情况下都是平滑下降的,不会存在波动,无需引入平方项进行调节,根据常见的暗角分布化简模型,对坐标为(x,y)的一点,校正系数f=(1+a*(x-x0+xd)2+b*(y-y0+yd)2)2,其中,(x0,y0)为相机成像面的中心坐标,(xd,yd)为像素的坐标,a和b为可调节参数。
[0045]
融合模型用于对存在遮挡的区域进行补强矫正,在上述多项式模型的基础上增加考虑遮挡部分的影响,对坐标为(x,y)的一点,矫正系数其中k1为横坐标方向的三次项矫正强度,k2为纵坐标方向的三次项矫正强度,k1和k2的值越大,对暗角的矫正能力越强。
[0046]
相机出厂后,用户不满意边缘亮度时,可以自定义浮点数n调节矫正强度,如图5所示,用户增大浮点数n的数值后,暗角分布曲线更加陡峭,边缘亮度越高;如图3所示,用户还能够指定环形遮挡的遮挡半径r的数值,指定后相机会取消出厂时设置好的非线性区域和线性区域的划分,对距离图像中心距离小于遮挡半径r的区域应用多项式模型处理,其余区域使用融合模型处理。
[0047]
待标定相机的去噪标定步骤包括:采集待标定相机第i列的感光特性曲线,对待标定相机第i列的感光特性曲线通过最小二乘法拟合直线,拟合得到的灰度截距作为第i列灰度值的偏置值offseti,将感光特性曲线斜率ki的平均值作为标定目标值k
mean
,计算
并关于其最小值进行归一化保证全部大于1,保证图像能够饱和,得到对于第i列灰度值所需的放大倍数gaini。
[0048]
当检测到对于待标定相机的每一列,其所需最大的放大倍数gaini不超过预定阈值时,启动随机标定方案通过打破感光特性曲线斜率和偏置的周期分布的方式消除人眼可见的噪声,否则将每列偏置值oddseti和放大倍数gaini写入待标定相机完成去噪标定。
[0049]
其中随机标定方案包括:计算偏置值周期,将小于周期内偏置值平均值的列标定为暗列,否则标定为亮列,暗列与同一周期内偏置值最大亮列的灰度差异小于2则随机替换为同一周期内任意亮列的偏置值,否则不进行处理。
[0050]
具体地,去噪标定中同时采集标准相机与待标定相机的感光特性曲线,面光源放置于可旋转的平台上,每进行一定时间的曝光后旋转平台使标准相机与待标定相机的光源位置互换再继续曝光,直至标准相机和待标定相机过曝。
[0051]
去噪标定步骤还包括:将待标定相机与标准相机的感光特性曲线调整一致,求出待标定相机每列感光特性曲线斜率的平均值k
mean
和标准相机每列感光特性曲线斜率的平均值k
standard
,得到待标定相机的整体增益写入待标定相机。
[0052]
本发明还提供了一种用于执行上述工业相机暗角标定方法的装置,该装置包括:面光源和旋转台,面光源固定在旋转台上跟随其旋转,标准相机和待标定相机位于同一高度,标准相机和待标定相机的镜头方向与面光源的表面垂直。
[0053]
面光源开启,标准相机和待标定相机同时曝光一定时间后关闭面光源,旋转台启动将面光源旋转180度,再次开启面光源让标准相机和待标定相机曝光,重复上述过程直至标准相机和待标定相机过曝。
[0054]
综上所述,本技术提出了一种工业相机暗角标定方法,包括:对待标定相机完成去噪标定后,设定待标定相机的预设采集灰度,镜头对准平面光源采集一张光源图像,设置栅格将光源图像划分为相同大小的若干栅格区域,计算每个栅格区域的平均灰度值,在每一行根据相邻栅格区域的平均灰度值变化寻找该行平均灰度值变化曲线的非线性和线性的交汇点作为该行的拐点,基于所有行的拐点对光源图像划分,将光源图像中的拐点内栅格区域划分为非线性区域,拐点外栅格区域划分为线性区域,其中对非线性区域应用多项式模型处理,对线性区域应用融合模型处理,获得每个栅格区域的标定系数fj写入待标定相机后出厂,相机在使用时根据用户自行设定的浮点数n以及所述标定系数fj,最终使用矫正系数fj=f
jn
对待标定相机标定。
[0055]
其中多项式模型用于对由于光线斜射导致的边缘暗角进行补强矫正,融合模型用于对环形遮挡的区域进行补强矫正。
[0056]
另外,相机出厂后,用户还能够自行设定遮挡半径r,手动调整环形遮挡下融合模型的应用区域范围。
[0057]
本技术中的步骤可根据实际需求进行顺序调整、合并和删减。
[0058]
尽管参考附图详地公开了本技术,但应理解的是,这些描述仅仅是示例性的,并非用来限制本技术的应用。本技术的保护范围由附加权利要求限定,并可包括在不脱离本技术保护范围和精神的情况下针对发明所作的各种变型、改型及等效方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1